Изобретение относится к ротору с переменным гидродинамическим сопротивлением для стационарного водного велосипеда и родственного ему велосипеда.
Стационарные водные велосипеды, называемые стационарными "гидробайками", как известно, используются для проведения занятий фитнесом, реабилитации, разработки и повышения тонуса мышц в ногах и пояснице, для спортивных тренировок и мероприятий, направленных на потерю веса.
Стационарные водные велосипеды содержат раму и пару педалей, к которым, как правило, присоединено средство для повышения сопротивления вращению педалей и, следовательно, интенсивности физической активности.
Другой тип гидробайка содержит ротор с лопастями, жестко присоединенный по центру к раме и соединенный с педалями. Интенсивность может быть установлена путем ручной регулировки открытия лопастей и связанного с этим сопротивления в соответствии с большим количеством предусмотренных положений.
В патенте США №5690588 изображено, например, устройство такого типа, в котором плоские лопасти можно ориентировать вручную в соответствии с предусмотренным количеством угловых положений по отношению к оси ротора. Кнопка, поджатая спиральной пружиной, гарантирует, что заранее заданное угловое положение удерживается, пока кнопка не будет снова нажата для выполнения новых настроек.
Целью настоящего изобретения является конструкция ротора с переменным гидродинамическим сопротивлением для стационарного водного велосипеда и родственного ему велосипеда, которые решают описанные выше недостатки.
Другой целью настоящего изобретения является конструкция ротора с переменным гидродинамическим сопротивлением для стационарного водного велосипеда и родственного ему велосипеда, в котором гидродинамическое сопротивление может изменяться при выполнении упражнений в соответствии с контролируемыми параметрами.
Другой целью настоящего изобретения является конструкция ротора с переменным гидродинамическим сопротивлением для стационарного водного велосипеда и родственного ему велосипеда, которая особенно проста и функциональна при одновременно низких затратах.
Эти цели в соответствии с настоящим изобретением достигаются путем выполнения конструкции ротора с переменным гидродинамическим сопротивлением для стационарного водного велосипеда такой, которая заявлена в пункте 1 формулы изобретения.
Дополнительные характеристики ротора и соответствующего стационарного водного велосипеда предусмотрены в зависимых пунктах формулы изобретения.
Характеристики и преимущества ротора с переменным гидродинамическим сопротивлением для стационарного водного велосипеда и родственного ему велосипеда в соответствии с настоящим изобретением должны быть более понятны из последующего описания, приведенного в качестве примера, а не в целях ограничения, со ссылками на прилагаемые схематические чертежи, на которых:
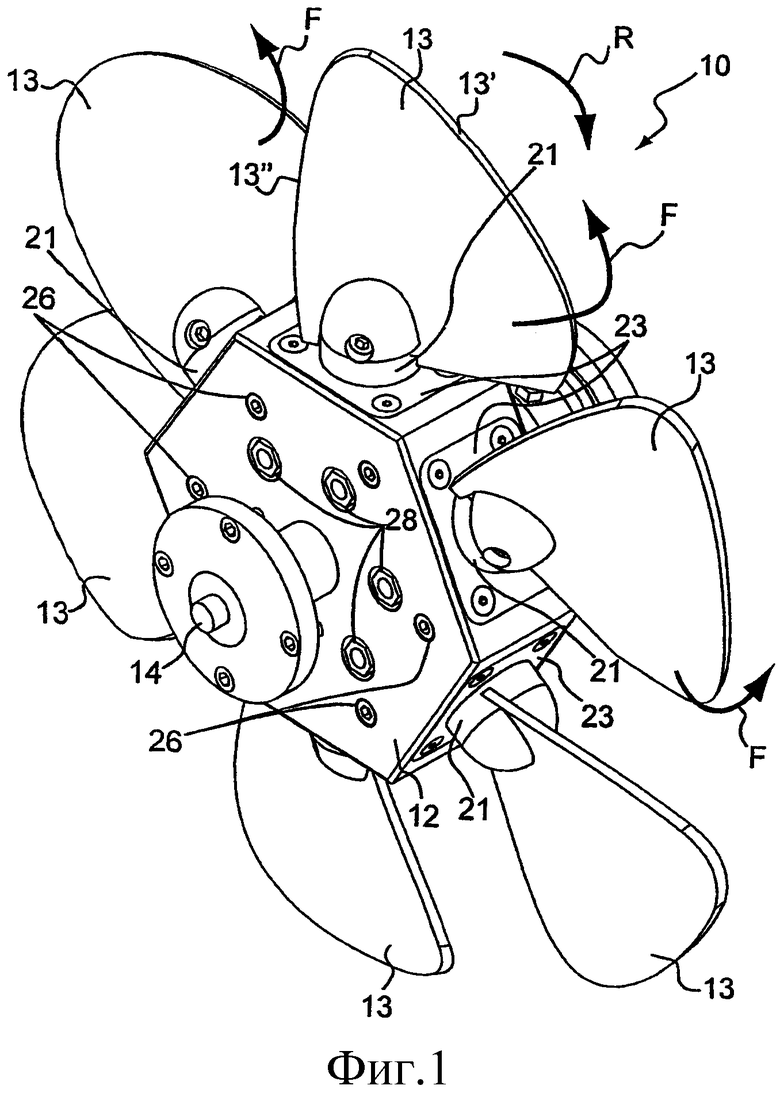
Фиг.1 и 2 представляют собой виды в аксонометрии противоположных сторон ротора для стационарного водного велосипеда;
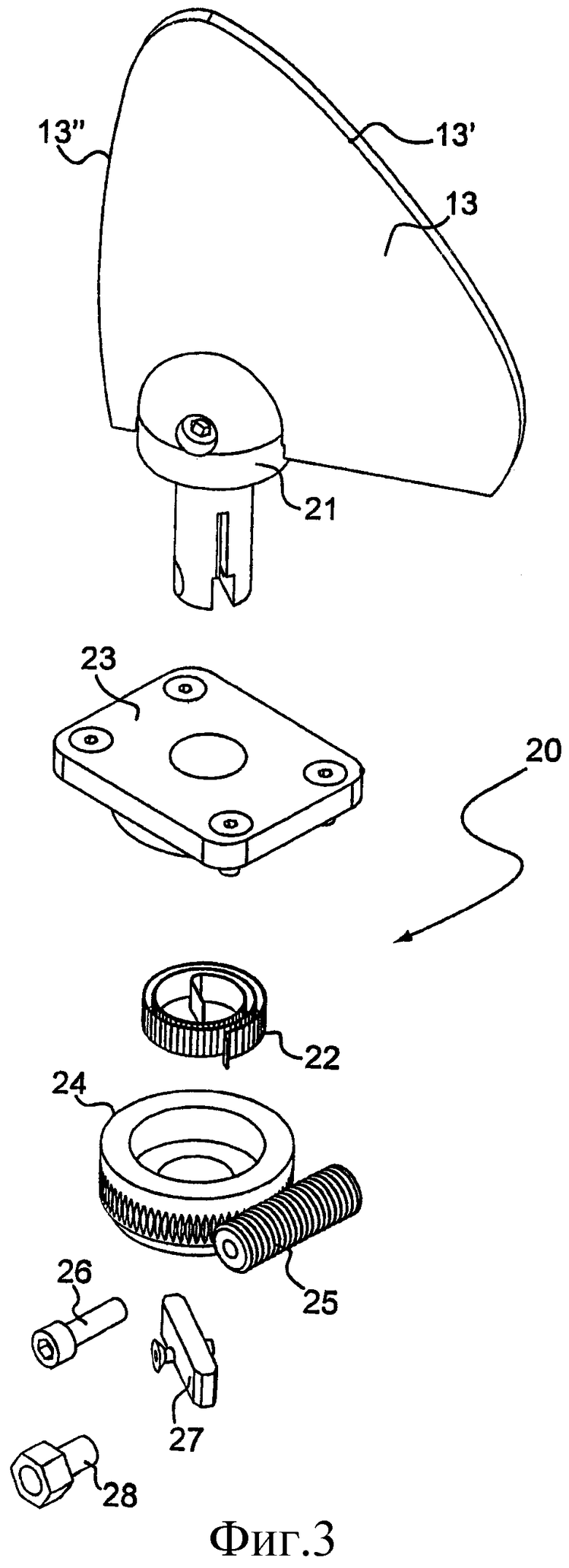
Фиг.3 представляет собой вид в аксонометрии лопасти и средства упругой фиксации, выполненных в соответствии с первым вариантом выполнения;
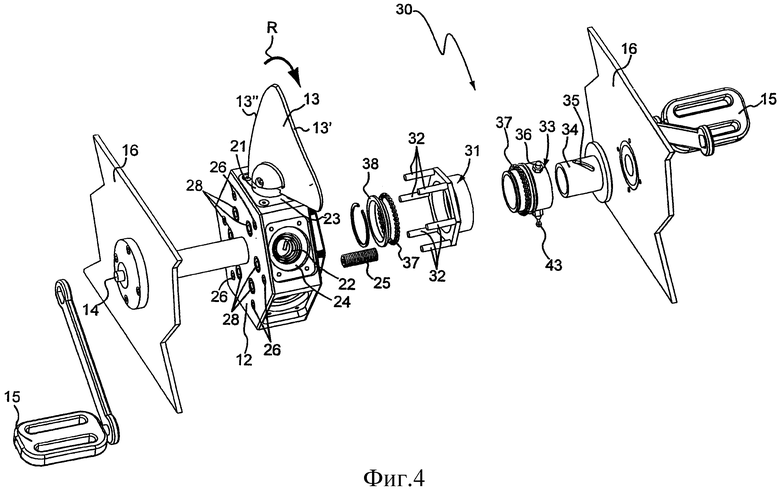
Фиг.4 представляет собой частичный разобранный вид ротора, изображенного на Фиг.1, который показывает средство для регулировки максимально возможного открытия лопастей в соответствии с первым вариантом выполнения;
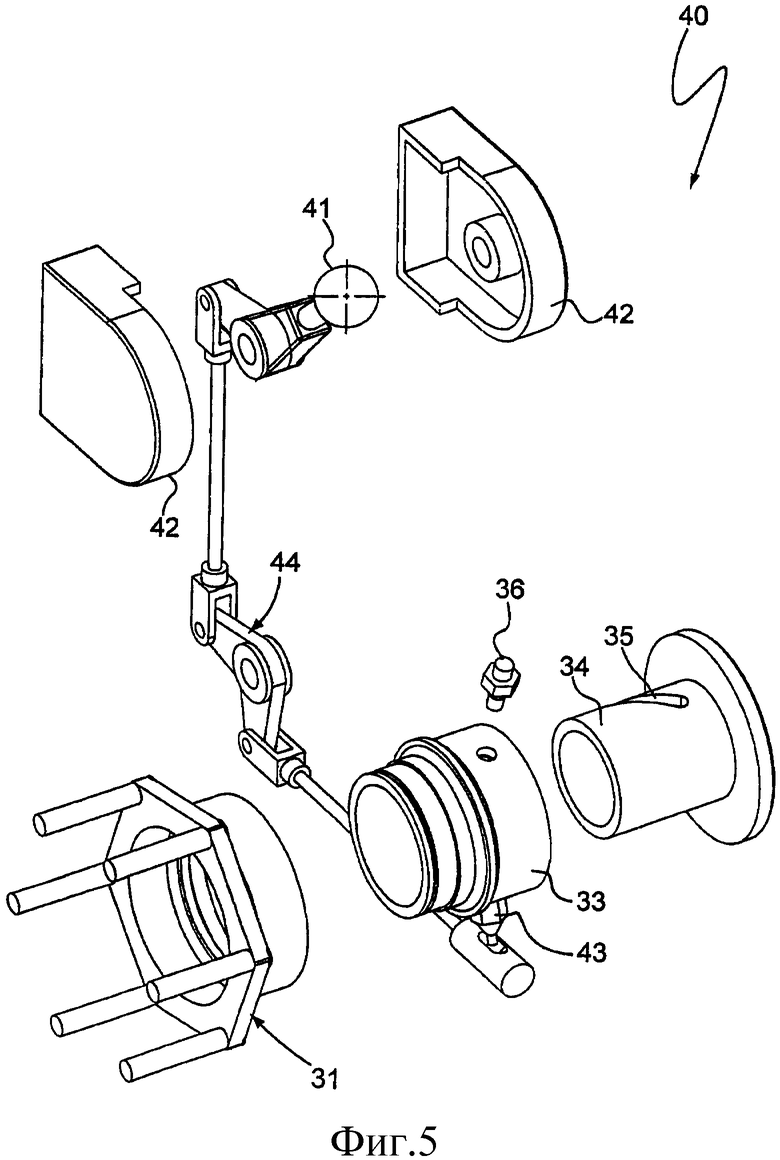
Фиг.5 представляет собой разобранный вид иллюстративного варианта выполнения средства управления максимально возможным открытием лопастей, соединенного со средством для регулировки максимального возможного открытия лопастей, изображенного на Фиг.4;
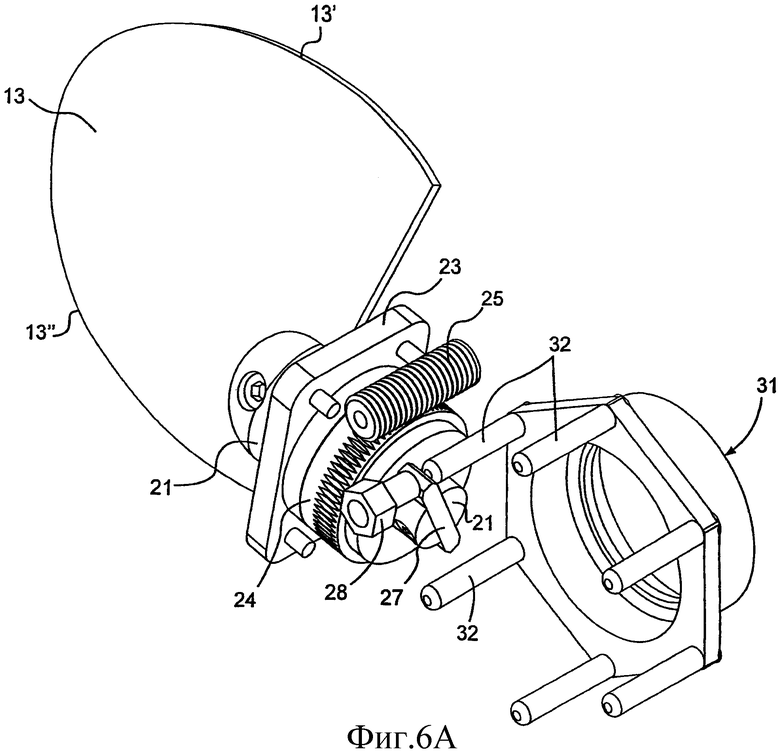
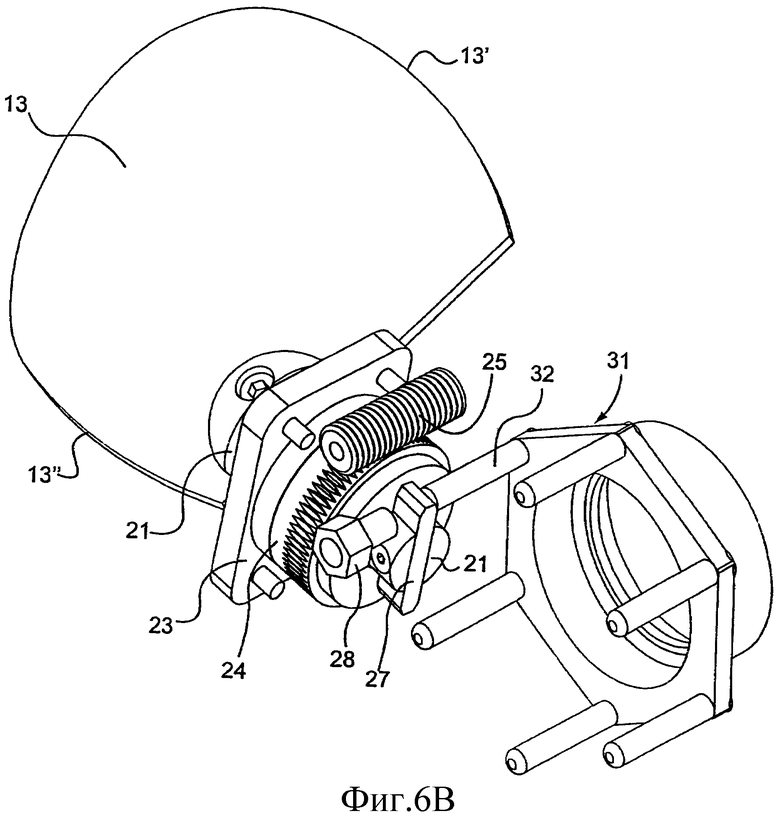
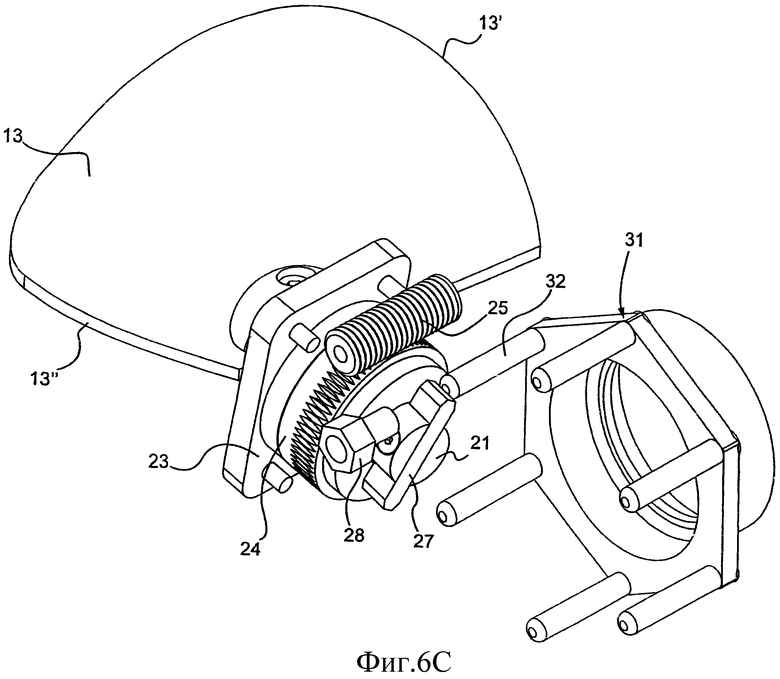
Фиг.6А, 6В и 6С изображают с помощью одной лопасти три различных возможных положения максимально возможного открытия лопастей;
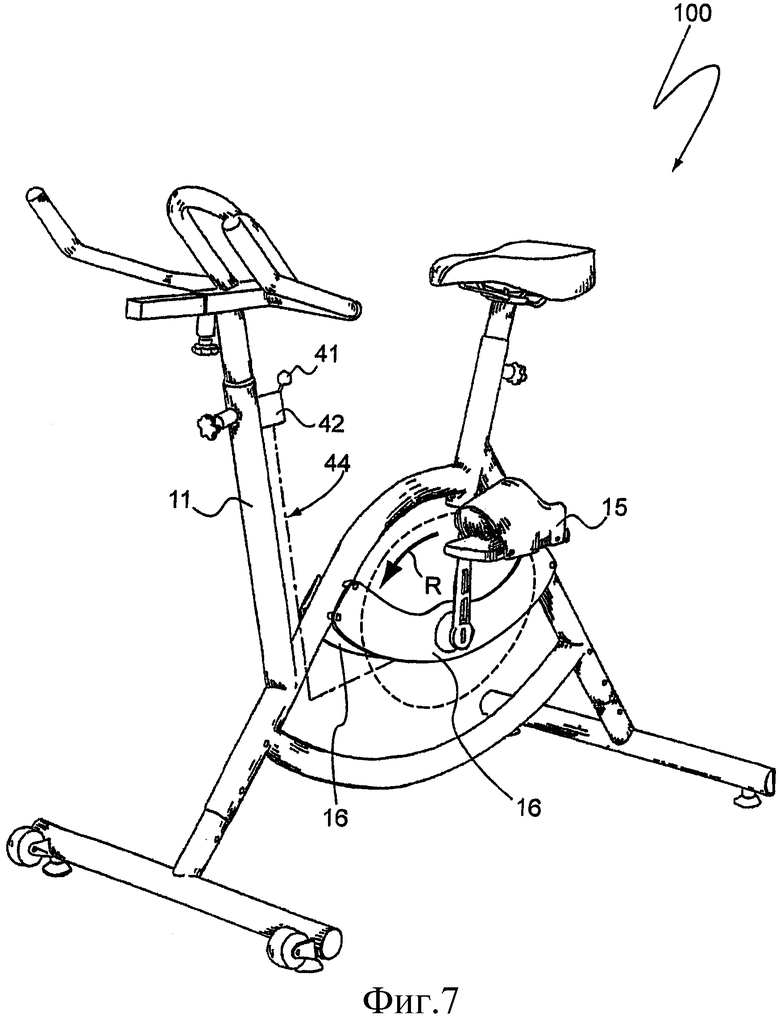
Фиг.7 представляет собой вид в аксонометрии стационарного водного велосипеда, содержащего ротор с переменным гидродинамическим сопротивлением, выполненного в соответствии с изобретением;
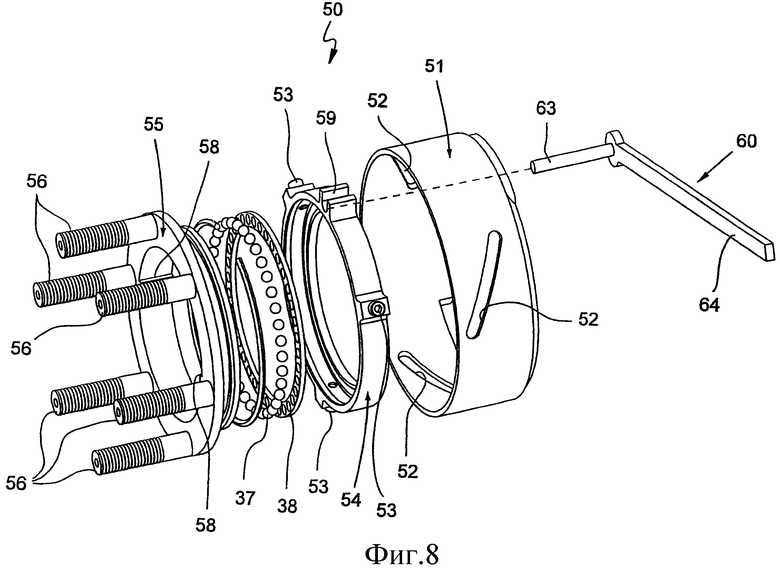
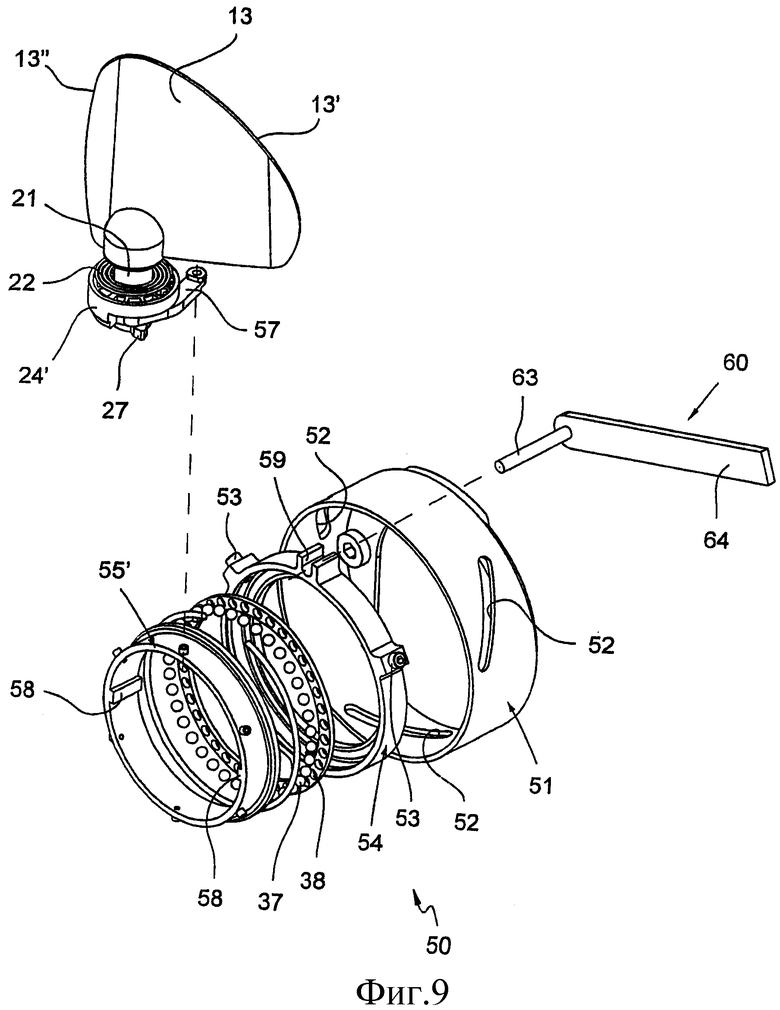
Фиг.8 и 9 показывают увеличенные детали в разобранном виде двух разных вариантов выполнения централизованного средства регулировки нагрузки пружины для ротора, выполненного в соответствии с изобретением;
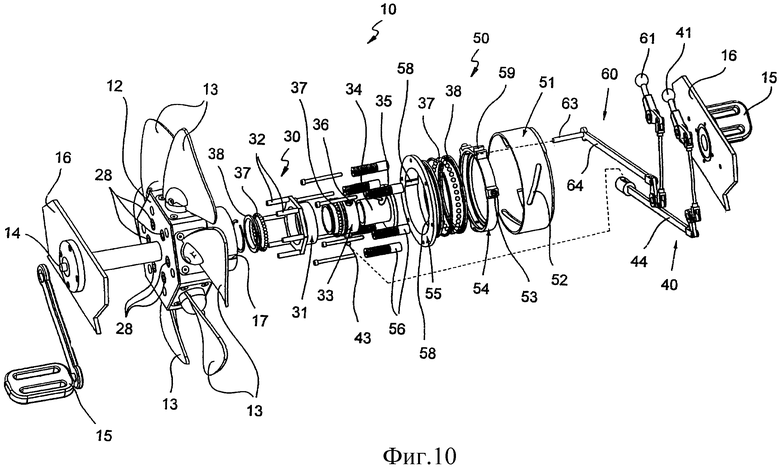
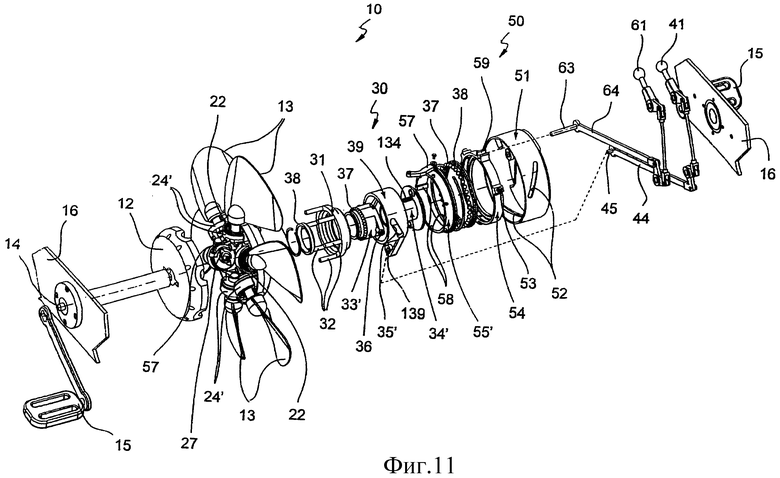
Фиг.10 и 11 соответственно показывают ротор, выполненный в соответствии с изобретением, оборудованный централизованным средством регулировки нагрузки пружины, изображенным на Фиг.8 и 9;
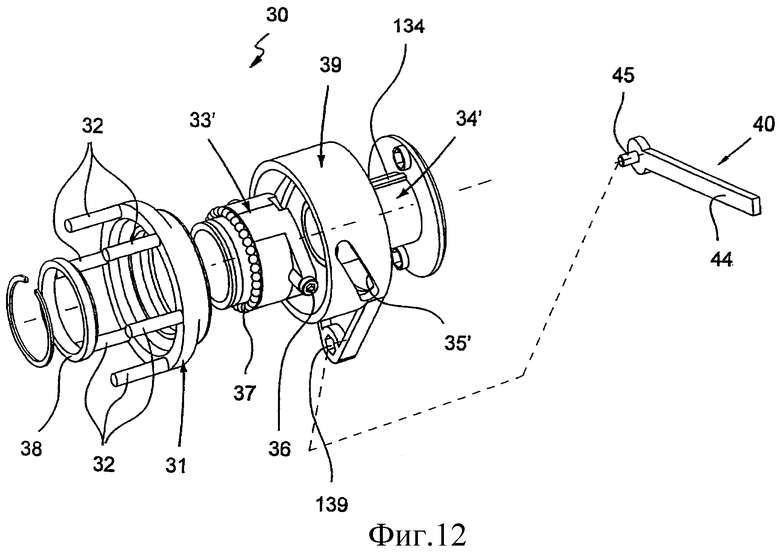
Фиг.12 показывает увеличенные детали в разобранном виде второго варианта выполнения средства для регулировки максимально возможного открытия лопастей, как показано на роторе, изображенном на Фиг.11.
Со ссылкой на чертежи показан ротор с переменным гидродинамическим сопротивлением для стационарного водного велосипеда и в целом обозначен номером 10 позиции, а связанный с ним стационарный водный велосипед обозначен номером 100 позиции.
В соответствии с изобретением гидродинамическое сопротивление может постепенно изменяться в зависимости от скорости вращения, сообщаемого ротору благодаря вращению педалей, между фиксированными минимальным значением сопротивления и максимальным значением сопротивления, которые могут быть заранее заданы перед началом или во время выполнения физического упражнения и не обязательно достигнуты во время выполнения этого упражнения.
Ротор 10, который представляет собой вращающуюся массу, содержит центральный элемент 12, по периметру которого на равном расстоянии друг от друга расположено несколько лопастей 13. Центральный элемент 12, из которого наружу на противоположных сторонах выходят оси 14 педалей 15, содержит средство 30 регулировки максимально возможного открытия лопастей (Фиг.1 и 2).
В показанном неограничивающем примере ротор 10 может быть гексагональным, круглым или круговым, как показано на чертеже, а также любой другой формы, при этом он снабжен шестью лопастями 13. В соответствии с изобретением количество лопастей также может быть разным и, во всяком случае, равно по меньшей мере двум.
Каждая лопасть 13 представляет собой морской тип лопасти, другими словами, она имеет спиральную форму с входной кромкой 13' и выходной кромкой 13” и выпуклую поверхность.
Каждая лопасть 13 соединена с ротором через средство 20 упругой фиксации, которое обеспечивает возможность его автоматического ориентирования, в зависимости от скорости вращения и тяги, которые сообщаются ротору 10 посредством ног человека, крутящего педали, чтобы, таким образом, увеличивать или уменьшать шаг винта в текучей среде, в которую он погружен, и, следовательно, сопротивление силе.
Это позволяет варьировать в процессе выполнения запрограммированной операции непрерывно и автоматически большую или меньшую степень открытия лопасти 13 и, таким образом, гидродинамическое сопротивление, основанное на большей или меньшей скорости, установленной для кручения педалей.
Коэффициент жесткости средства 20 упругой фиксации определяет соотношение между скоростью кручения педалей и открытием лопасти.
На продолжении выходного края 13” винта имеется поворотный штифт 21, ограниченный лопастью 13 и соединенный с центральным элементом 12 ротора 10 посредством упругого средства 22, который частично противодействует его вращению (Фиг.3).
В соответствии с тем, что было показано на Фиг.1, на котором ротор 10 должен вращаться по часовой стрелке, как схематично изображено стрелкой R, чтобы сперва ввести в воду входной край 13' лопасти 13. По мере увеличения скорости вращения лопасти 13 постепенно расширяются, как показано стрелкой F. На Фиг.2 показан тот же ротор 10, что изображен на Фиг.1, но с противоположной стороны.
Поворотный штифт 21 лопастей 13, помещенный на продолжение выходного края 13” лопастей, обеспечивает благодаря их спиральной форме перенос текучей среды, в данном конкретном случае воды, которая создает поток, начинающийся в центре винта и проходящий в радиальном направлении к наружному периметру, задавая поток воды, который «облизывает» ноги и талию. Преимущественно, во время кручения педалей достигается повышающий тонус массаж мышц, не создавая опасных условий для устойчивости велосипеда.
Действительно, если бы поворотный штифт 21 лопастей 13 был размещен на продолжении входного края 13' лопастей, то гидродинамическое сопротивление ротора 10 было бы нейтрализовано и, следовательно, не было бы никакого движения воды.
Упругое средство в приведенных примерах состоит из пластинчатой пружины 22, натяжение которой можно регулировать вручную, чтобы увеличивать или уменьшать силу, противостоящую вращению лопастей 13, и тем самым достигать такого положения сопротивления, которое является более или менее высоким. Термин "пластинчатая пружина" означает любой тип спиральной пружины любой высоты, которая содержит как металлическую полосу, так и проволоку, эквивалентные друг другу, и которые для целей изобретения могут быть заменены друг другом.
В соответствии с показанным первым предпочтительным вариантом выполнения поворотный штифт 21 вставляется и может свободно вращаться в съемной опоре 23, которая может быть подсоединена к центральному элементу 12 ротора 10, а также во втулку 24 регулятора пластинчатой пружины 22. Пластинчатая пружина 22 содержит первый конец, взаимодействующий со штифтом 21, и второй конец, взаимодействующий со втулкой 24, в которой он содержится.
Шнек 25 входит в зацепление с наружной поверхностью втулки 24 регулятора пластинчатой пружины 22.
Корректировка нагрузки пружины 22 может быть осуществлена путем корректировки шнека 25 снаружи ротора 10 с помощью специального ключа, который не показан, причем указанный шнек затем фиксируют с помощью ограничительного винта 26 отдельно для каждой лопасти, когда ротор не движется.
В соответствии с другими вариантами выполнения ротора, выполненными в соответствии с изобретением, как показано на Фиг.8-12, предусмотрено централизованное средство 50 регулировки нагрузки пружин, которое обеспечивает возможность варьирования нагрузки всех пружин одновременно, а также позволяет осуществлять это и во время движения ротора.
Централизованное средство 50 регулировки нагрузки пружин содержит наружную оправку 51, прикрепленную к одной из двух опорных пластин 16, которые поддерживают ротор 10 на противоположных сторонах, и снабжено спиральными канавками 52, в которой приводные винты 53 приводятся в действие, проходя из наружной поверхности упорного кольца 54, которое приводится во вращение управляющим средством 60 и перемещение которого направляется спиральными канавками 52.
Упорное кольцо 54 соединено в контакте с кольцевым ползунком 55, по окружности которого ко втулке 24 неподвижно присоединены соединительные элементы в количестве, равном числу втулок 24.
В первом варианте выполнения, изображенном на Фиг.8, соединительные элементы составлены из нескольких штифтов 56 регулятора с резьбой, неподвижно присоединенных, например с помощью винтов, к плоской кольцевой поверхности кольцевого ползунка 55, ориентированного в сторону корпуса ротора 12, причем каждый из них взаимодействует с наружной поверхностью втулки 24 упругого средства 20 фиксации лопастей 13.
Кольцевой ползунок 55 содержит на внутренней поверхности отверстия по меньшей мере одну шпонку 58, предназначенную для вставления в по меньшей мере одно соответствующее гнездо 17 центрального элемента ротора 12, которая направляет осевое скольжение кольцевого ползунка 55 по отношению к центральному элементу 12 ротора 10, как показано в разобранном виде на Фиг.10.
Соединение между упорным кольцом 54, которое остается неподвижным во время работы, если оно не приводится во вращение управляющим средством 60, и кольцевым ползунком 55, который вращается как одно целое с центральным элементом ротора 12, если только он не перемещается управляющим средством 60, достигается с помощью кольцевого шарикоподшипника 37 и связанного с ним кольца 38, которое определяет гнездо для шарикоподшипников 37, которые удерживаются на месте стопорным кольцом.
Благодаря такой конструкции, система может работать даже тогда, когда ротор 10 движется, иными словами, осуществляя регулировку, одновременно продолжая крутить педали.
Управляющее средство 60 централизованного средства 50 регулировки нагрузки пружин содержит в соответствии с предпочтительным вариантом выполнения изобретения управляющий рычаг 61, подведенный к раме 11 стационарного водного велосипеда 100, в положении, которое удобно для пользователя. Управляющий рычаг 61 может поворачиваться в кожухе, который не показан, и может поворачиваться либо непрерывно, либо в заданное количество положений. Таким образом, путем поворота упорного кольца 54 относительно наружной оправки 51, прикрепленной к одной из опорных пластин 16, получают осевое перемещение указанного упорного кольца 54, кольцевого ползунка 55 и всего, что присоединено к нему.
Все штифты 56 регулятора с резьбой одновременно приводятся во взаимодействие со связанными с ними втулками 24 регулятора, варьируя угловое положение для определения вариаций нагрузки пружин 22.
Во втором варианте выполнения, изображенном на Фиг.9, соединительные элементы, с другой стороны, состоят из нескольких рычагов регулятора, шарнирно закрепленных на наружной оболочке кольцевого ползунка 55', причем каждый из них взаимодействует со втулкой 24 упругого средства 20 фиксации лопастей 13.
Детали, приведенные в увеличенном виде на Фиг.9, показывают рычаг 57 регулятора, выполненный с возможностью поворота снаружи втулки 24' регулятора, которая содержит пластинчатую пружину 22, выполненную из проволоки.
Осевое перемещение кольцевого ползунка 55” по центральному элементу 12 ротора 10, показанного в разобранном виде на Фиг.11, управляется совершенно аналогичным образом, как описано для первого варианта выполнения, посредством шпонок 58.
Более того, во всех описанных вариантах выполнения на конце поворотного штифта 21, который выступает относительно втулки 24, наложена примыкающая поперечина 27.
Задачей пружины 22 является удержание поперечины 27 в ее исходном положении в контакте с винтом 28 регулировки начального положения, который ввернут и зафиксирован на центральном элементе 12 ротора 10 в направлении, перпендикулярном оси вращения штифта 21, причем к нему имеется доступ снаружи этого элемента (Фиг.1). Таким образом, определяется начальное положение минимального открытия каждой лопасти 13.
Установка винта 28 регулировки начального положения и нагрузки пружины 22 предварительно задается производителем, так что поэтому пользователю не следует вмешиваться в эти установки, разве кроме персонала, специализирующегося в техническом обслуживании оборудования.
С помощью регулировки пластинчатых пружин 22 можно автоматически запрограммировать даже быстрый ритм кручения педалей, с минимальным или заранее заданным открытием лопастей, чтобы контролировать усилия в преодолении сопротивления воды, без необходимости ставить его в зависимость от полного открытия лопастей.
Диапазон поворота лопастей 13, который в изображенном примере составляет около 60 градусов, определяется средством 30 регулировки максимального возможного открытия, показанного на Фиг.4, которое устанавливает ограничитель, который может быть модифицирован пользователем даже во время работы.
Во время работы лопасти 13 постепенно располагаются в положениях, которые зависят от скорости кручения педалей, в диапазоне между фиксированным начальным положением «минимально возможного открытия» и положением «максимально возможного открытия», которыми можно управлять вручную как до, так и во время работы.
Таким образом, возможно, что во время работы на пике неожиданно обнаруженного сопротивления лопасти 13 не доходят до ограничителя максимально возможного открытия.
Таким образом, необходимо провести различие между «положением максимально возможного открытия», которое представляет собой то положение, которое может быть достигнуто теоретически и определяется средством 30 регулировки, и «положением максимального сопротивления», которое представляет собой фактическое положение, достигаемое лопастями во время работы благодаря средствам 20 упругой фиксации.
В соответствии с изображенным предпочтительным вариантом выполнения диапазон поворота лопастей 13 определяется расстоянием между винтом 28 регулировки начального положения и подвижным ограничительным фланцем 31, который представляет собой механический ограничительный элемент для ограничения поворота поперечины 27 и, следовательно, самой лопасти 13.
Подвижный ограничительный фланец 31 содержит несколько опорных штифтов 32, по одному для каждой лопасти 13, концы которых расположены противоположно относительно соответствующих винтов 28 регулировки начального положения. Такая конфигурация обеспечивает возможность одновременной регулировки одного и того же ограничителя для всех лопастей ротора.
На Фиг.6А, 6В и 6С показано, в качестве примера, на одной лопасти три различных положения подвижного ограничительного фланца 31. Эти положения представляют собой, соответственно, первое положение, в котором лопасти 13 зафиксированы, другими словами, положение максимально возможного открытия совпадает с положением минимального открытия и соответствует углу вхождения в воду, приблизительно 30 градусов; иллюстративное промежуточное положение, а также конечное положение, в котором лопасти 13 остаются свободными для достижения положения максимально возможного открытия, равного углу вхождения в воду 90 градусов.
В соответствии с изобретением можно предусмотреть любое число промежуточных положений между положениями минимального и максимального открытия лопасти 13, также как и можно предусмотреть различные углы лопастей 13 в положениях минимального и максимального открытия.
Подвижный ограничительный фланец 31 выполнен с возможностью прямолинейного перемещения в направлении винта 28 регулировки начального положения и от него с помощью кулачкового механизма, который в соответствии с первым вариантом выполнения, показанном на Фиг.4, содержит прямолинейно перемещающийся взад и вперед ползунок 33, аксиально соединенный с фланцем 31 на одном конце и со втулкой 34, на которой он может вращаться и скользить, на противоположном конце, как показано на Фиг.4.
Втулка 34 действительно имеет спиральную канавку 35, в которой приводится в действие приводной винт 36, который зафиксирован на ползунке 33 контргайкой.
Соединение между фланцем 31, который вращается во время работы, и перемещающимся взад и вперед ползунком 33, который остается неподвижным, если он не управляется для вращательно-поступательного перемещения с целью регулировки, достигается с помощью двух кольцевых шарикоподшипников 37 и связанного с ними кольца 38, которое определяет гнездо для шарикоподшипников 37, которые удерживаются на месте стопорным кольцом.
Благодаря этому система может также работать с движущимся ротором 10, иными словами, можно осуществлять регулировку, продолжая крутить педали.
Ротор 10 также содержит средство 40 управления максимально возможным открытием, которое может быть установлено по усмотрению пользователя или инструктора в зависимости от запрограммированного упражнения, например легкой тренировки, повышения тонуса с переменной интенсивностью, реабилитации с максимальной интенсивностью или других.
Средство 40 управления максимально возможным открытием содержит в соответствии с предпочтительным вариантом выполнения изобретения управляющий рычаг 41, подведенный к раме 11 стационарного водного велосипеда 100.
На практике эта система дает пользователю возможность варьировать, в большей или меньшей степени, автоматическое открытие лопасти в непрерывном или дифференцированном режиме в зависимости от запрограммированной тренировки.
В примере, показанном на Фиг.5, управляющий рычаг 41 поворачивается в кожухе 42 и может быть повернут на 90 градусов непрерывно или в заранее заданное количество положений.
Действительно, если регулировка управляющего рычага 41, которая соответствует изменению ограничителя лопастей 13, осуществляется непрерывно, то можно установить любое значение ограничителя. В противном случае, если регулировка осуществляется в соответствии с заранее заданными положениями, даже очень близко друг к другу, ограничители лопастей будут перемещаться на дискретные значения.
Управляющий рычаг 41 соединен с шаровым шарниром 43 перемещающегося взад и вперед ползунка 33, например, с помощью жестких или гибких соединительных элементов 44.
Соединительные элементы 44 могут представлять собой жесткие тяги и рычаги, соответствующим образом жестко соединенные с рамой 11 велосипеда 100, а также другие известные системы, как, например, гибкие провода, содержащиеся в оболочках, как схематически показано на Фиг.7.
Блок 42 управления установлен на раме 11 велосипеда 100 в таком положении, чтобы было как можно проще дотянуться до него и управлять им.
Для различных положений рычага 41 управления имеется столько же соответствующих угловых положений перемещающегося взад и вперед ползунка 33 и аксиальных положений скольжения подвижного фланца 31 и, таким образом, столько же уровней максимального открытия лопастей.
В соответствии с другим вариантом выполнения средства 30 регулировки максимально возможного открытия лопастей, показанного более подробно в увеличенном виде на Фиг.12 и в разобранных видах на Фиг.10 и 11, подвижный ограничительный фланец 31, на котором расположен контактирующий штифт 32 для каждой лопасти 13, может прямолинейно перемещаться в направлении винта 28 регулировки начального положения и от него с помощью кулачкового механизма, который содержит прямолинейно перемещающийся ползунок 33', аксиально соединенный посредством шпонки 134 с неподвижной втулкой 34', относительно одной из опорных пластин 16, а также перемещающийся взад и вперед фланец 39, который непосредственно приводится во вращение средством 40 управления, который определяет осевое перемещение прямолинейно перемещающегося ползунка 33'.
Перемещающийся взад и вперед фланец 39 действительно снабжен спиральной канавкой 35', в которой приводится в действие приводной винт 36, который зафиксирован на прямолинейно перемещающемся ползунке 33'.
Даже в соответствии с этим вариантом выполнения соединение между фланцем 31 и прямолинейно перемещающимся ползунком 33' обеспечивается посредством по меньшей мере одного кольцевого шарикоподшипника 37 и связанного с ним кольца 38, которые удерживаются на месте стопорным кольцом. Благодаря этому система может также работать, когда ротор 10 движется, иными словами, осуществляя регулировку, продолжая крутить педали.
Средство 40 управления максимально возможным открытием содержит управляющий рычаг 41, который можно поворачивать непрерывно или в заранее заданное количество положений, жесткие или гибкие соединительные элементы 44, соответствующие описанным выше и заканчивающиеся цилиндрическим штифтом 45, расположенным с осью, параллельной оси ротора 10, подсоединенного к перемещающемуся взад и вперед фланцу 39, чтобы привести его во вращение.
В этом последнем варианте выполнения разделение колебательных движений и осевого прямолинейного перемещения в двух различных элементах, другими словами, в перемещающемся взад и вперед фланце 39 и прямолинейно перемещающемся ползунке 33', упрощает механическое соединение между частями. В частности, можно заменить шаровой шарнир 43, который передает вращательное движение перемещающегося взад и вперед ползунка 33, изображенного на Фиг.4 и 10, и осевое движение, которое следует, простым цилиндрическим штифтом 45, аксиально прикрепленным и соединенным с отверстием 139 перемещающимся взад и вперед фланцем 39, при этом относительное вращение между цилиндрическим штифтом 45 и отверстием 139 является свободным.
На Фиг.7 изображен в качестве примера стационарный водный велосипед 100, выполненный в соответствии с изобретением, содержащий раму 11, на которой установлен ротор 10, и к которой присоединены педали 15.
Ротор 10, только схематически изображенный на Фиг.7 штрих-пунктирной линией, расположен на раме 11 в центральном положении, с направленной вперед входной кромкой 13' лопастей 13. Ротор 10, возможно, защищен открытым кожухом, но он предпочтительно поддерживается просто двумя опорными пластинами 16, ограниченными рамой 11, функцией которой также является придание устойчивости всей конструкции.
Средство 40 управления максимально возможным открытием лопастей, соединенное со средством 30 регулировки, неподвижно соединено с рамой 11 так, чтобы управляющий рычаг 41 находился в положении, до которого пользователю легко дотянуться.
Совершенно аналогичным образом также управляющее средство 60 централизованного средства 50 регулировки нагрузки пружин устанавливают на раму 11 в практичном положении для воздействия на него пользователем.
Средства 40 и 60 управления также могут быть одновременно активированы, поскольку связанные с ними средства 30 и 50 регулировки расположены концентрическим образом и не мешают друг другу.
Ротор с переменным гидродинамическим сопротивлением для стационарного водного велосипеда и родственного ему стационарного объекта водного велосипеда, выполненных в соответствии с настоящим изобретением, имеет то преимущество, что не предусмотрена какая-либо ручная регулировка открытия лопастей, которые регулируются автоматически и могут варьироваться в зависимости от кручения педалей.
Преимущественно, в области той же самой запрограммированной деятельности, как аквааэробике, так и реабилитации или других, лопасти никогда не имеют одинаковое открытие, поскольку они всегда находятся в движении (частичное открытие, постепенное открытие, полное открытие и т.д.). Большее открытие или закрытие будет зависеть от большей или меньшей мощности, прикладываемой благодаря кручению педалей конечным пользователем.
Еще одно преимущество состоит в том, что регулировка может быть осуществлена без прерывания кручения педалей.
Еще одно преимущество централизованного управления нагрузкой всех спиральных пружин состоит в простоте и быстроте регулировки, а также в снижении возможных ошибок калибровки от одной пружины к другой.
Средство управления централизованным средством регулировки нагрузки пружин также может преимущественно регулироваться с ротором в движении, даже одновременно со средством управления регулировкой максимального открытия лопастей.
Кроме того, ротор с переменным гидродинамическим сопротивлением для стационарного водного велосипеда в соответствии с изобретением предпочтительно создает поток воды, который «облизывает» поверхность ног, усиливая терапевтический эффект.
Таким образом, выполненный ротор с переменным гидродинамическим сопротивлением для стационарного водного велосипеда и родственного ему велосипеда может претерпевать многочисленные модификации и варианты, все из которых защищаются изобретением; кроме того, все детали можно заменить технически эквивалентными элементами. На практике используемые материалы, а также размеры могут быть любыми в соответствии с техническими требованиями.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕДАЛЬ ВЕЛОСИПЕДА | 2003 |
|
RU2343083C2 |
| Двухколесный велосипед | 1989 |
|
SU1754561A1 |
| Велосипед | 1984 |
|
SU1366440A1 |
| УСТРОЙСТВО КРЕПЛЕНИЯ ОБУВИ НА ПЕДАЛИ ВЕЛОСИПЕДА ИЛИ АНАЛОГИЧНОГО МЕХАНИЗМА | 1990 |
|
RU2029702C1 |
| Водный велосипед (вопед) | 2021 |
|
RU2772919C1 |
| ВОДНЫЙ ВЕЛОСИПЕД | 2014 |
|
RU2569453C1 |
| Двухступенчатая передача для велосипеда | 1969 |
|
SU768691A1 |
| ВЕЛОСИПЕД | 2001 |
|
RU2203811C2 |
| ТРЕНАЖЕР СО СТАЦИОНАРНЫМ ВЕЛОСИПЕДОМ И НАДУВНЫМ СИДЕНЬЕМ | 2010 |
|
RU2547043C2 |
| ВОДНЫЙ ВЕЛОСИПЕД | 2006 |
|
RU2314965C1 |
Представлен ротор с переменным гидродинамическим сопротивлением для стационарного водного велосипеда, содержащий центральный элемент (12), на периферии которого установлены лопасти (13), которые представляют собой лопасти морского типа, содержащие входной край (13'), выходной край (13”) и выпуклую спиральную поверхность. Причем указанный ротор на своих противоположных наружных поверхностях имеет оси (14) для педалей (15), при этом каждая лопасть (13) на указанном выходном крае (13”) соединена с указанным ротором (10) посредством упругих крепежных средств (20), выполненных с обеспечением возможности автоматической ориентации лопасти (13), в зависимости от скорости вращения, сообщаемой ротору (10) через педали (15). Указанный центральный элемент (12) вмещает средство (30) регулировки максимально возможного открытия лопастей, содержащее механический ограничительный элемент (31), выполненный с возможностью перемещения для изменения максимально возможного открытия каждой лопасти (13). При этом указанное средство (30) регулировки максимально возможного открытия выполнено с возможностью приведения в действие средством (40) управления, присоединенным на одном конце к указанному средству (30) регулировки максимально возможного открытия. Технический результат заключается в создании переменного гидравлического сопротивления для водного велосипеда. 2 н. и 16 з.п. ф-лы, 12 ил.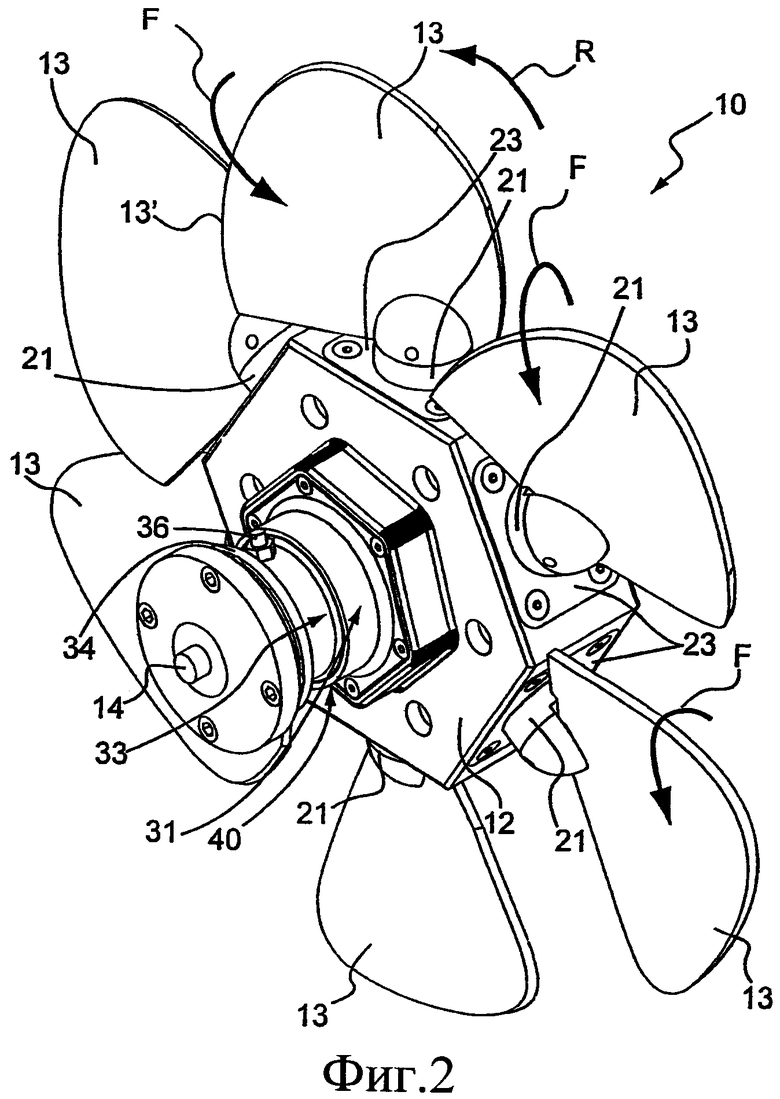
1. Ротор с переменным гидродинамическим сопротивлением для стационарного водного велосипеда, содержащий центральный элемент (12), на периферии которого установлены лопасти (13), отличающийся тем, что указанные лопасти (13) представляют собой лопасти морского типа, имеющие входной край (13'), выходной край (13") и выпуклую спиральную поверхность, причем указанный ротор на своих противоположных наружных поверхностях имеет оси (14) для педалей (15), при этом каждая лопасть (13) на указанном выходном крае (13") присоединена к указанному ротору (10) с помощью средств (20) упругой фиксации, выполненных с обеспечением возможности автоматической ориентации лопасти (13), в зависимости от скорости вращения, сообщаемой ротору (10) через педали (15), причем указанный центральный элемент (12) вмещает средство (30) регулировки максимально возможного открытия лопастей, содержащее механический ограничительный элемент (31), выполненный с возможностью перемещения для изменения максимально возможного открытия каждой лопасти (13), при этом указанное средство (30) регулировки максимально возможного открытия выполнено с возможностью приведения в действие средством (40) управления, присоединенным на одном конце к указанному средству (30) регулировки максимально возможного открытия.
2. Ротор по п.1, отличающийся тем, что указанные средства (20) упругой фиксации содержат для каждой лопасти (13) поворотный штифт (21), размещенный на продолжении выходного края (13”) и соединенный с указанным центральным элементом (12) ротора (10) с помощью упругих средств (22), которые частично противостоят его вращению, а в состоянии покоя доводят лопасти (13) обратно в положение минимального открытия.
3. Ротор по п.2, отличающийся тем, что указанные упругие средства содержат пластинчатую пружину (22), причем первый конец взаимодействует с указанным поворотным штифтом (21), а второй конец взаимодействует со втулкой (24, 24') регулятора, которая содержит указанную пластинчатую пружину (22).
4. Ротор по п.3, отличающийся тем, что с наружной поверхностью указанной втулки (24) регулятора пластинчатой пружины (22) взаимодействует шнек (25) для регулировки натяжения.
5. Ротор по п.3, отличающийся тем, что он содержит централизованное средство (50) регулировки нагрузки пружин, содержащее неподвижную наружную оправку (51), вращательно-поступательное упорное кольцо (54) и кольцевой поступательный ползунок (55, 55'), причем указанное упорное кольцо (54) приводится во вращение средством (60) управления и направляется в осевом поступательном перемещении посредством соединения между по меньшей мере одним приводным винтом (53) упорного кольца (54) и по меньшей мере одной спиральной канавкой (52) неподвижной наружной оправки (51), при этом указанный кольцевой ползунок (55, 55') соединен с указанным центральным элементом (12) с возможностью скольжения в осевом направлении и имеет соединительные элементы (56, 57) для каждой из указанных втулок (24, 24') регулятора.
6. Ротор по п.5, отличающийся тем, что каждый из указанных соединительных элементов содержит штифт (56) регулятора с резьбой, неподвижно присоединенный к плоской кольцевой поверхности указанного кольцевого ползунка (55) и взаимодействующий с наружной поверхностью указанной втулки (24) регулятора пластинчатой пружины (22) для регулировки натяжения.
7. Ротор по п.5, отличающийся тем, что каждый из указанных соединительных элементов содержит рычаг (57) регулятора, шарнирно закрепленный на наружной оболочке указанного кольцевого ползунка (55') и снаружи указанной втулки (24') регулятора пластинчатой пружины (22) для регулировки натяжения.
8. Ротор по любому из пп.5-7, отличающийся тем, что соединение между указанным упорным кольцом (54) и указанным кольцевым ползунком (55, 55') обеспечивается посредством кольцевого шарикоподшипника (37) и связанного с ним кольца (38) гнезда шарикоподшипника, которые удерживаются на месте стопорным кольцом.
9. Ротор по любому из пп.2-7, отличающийся тем, что он содержит для каждой лопасти (13) винт (28) регулировки начального положения для регулировки положения минимального открытия, причем указанный винт (28) выполнен с возможностью соединения путем упора с поперечиной (27), размещенной на конце указанного поворотного штифта (21).
10. Ротор по любому из пп.1-7, отличающийся тем, что указанное средство (30) регулировки максимально возможного открытия содержит подвижный ограничительный фланец (31), который представляет собой механический ограничительный элемент, выполненный с возможностью поступательного перемещения с помощью кулачкового механизма.
11. Ротор по п.10, отличающийся тем, что указанный подвижный фланец (31) содержит опорные штифты (32), по одному для каждой лопасти (13), конец которых находится напротив соответствующего винта (28) регулировки начального положения.
12. Ротор по п.11, отличающийся тем, что указанный кулачковый механизм содержит перемещающийся взад и вперед ползунок (33), на одном конце аксиально соединенный с фланцем (31), а на противоположном конце со втулкой (34), на которой он может вращаться и скользить, причем втулка (34) имеет спиральную канавку (35), с которой взаимодействует приводной винт (36), который зафиксирован на ползунке (33).
13. Ротор по п.12, отличающийся тем, что соединение между фланцем (31), который вращается во время работы, и перемещающимся взад и вперед ползунком (33), который остается неподвижным, обеспечивается посредством двух кольцевых шарикоподшипников (37) и связанного с ними кольца (38) гнезда шарикоподшипника, которое удерживается на месте стопорным кольцом.
14. Ротор по п.11, отличающийся тем, что указанный кулачковый механизм содержит поступательно перемещающийся ползунок (33'), на одном конце аксиально соединенный с фланцем (31), а на противоположном конце - с перемещающимся взад и вперед фланцем (39), причем указанный перемещающийся взад и вперед фланец имеет спиральную канавку (35'), с которой взаимодействует приводной винт (36), который зафиксирован на ползунке (33'), при этом указанный поступательно перемещающийся ползунок (33') также выполнен с возможностью аксиального скольжения по неподвижной втулке (34').
15. Ротор по п.14, отличающийся тем, что соединение между фланцем (31), который вращается во время работы, и поступательно перемещающимся ползунком (33') обеспечивается посредством кольцевого шарикоподшипника (37) и связанного с ним кольца (38) гнезда шарикоподшипника, которое удерживается на месте стопорным кольцом.
16. Ротор по любому из пп.12-15, отличающийся тем, что указанное средство (40) управления максимально возможным открытием содержит управляющий рычаг (41), выполненный с возможностью поворота в кожухе (42) и с возможностью поворота приблизительно на 90 градусов непрерывно или в заранее заданное число положений, причем указанный управляющий рычаг (41) соединен с указанным ползунком (33, 33') с помощью соединительных элементов (44), таких как жесткие тяги и рычаги или гибкая проволока.
17. Ротор по любому из пп.5-7, отличающийся тем, что указанное средство (60) управления указанного централизованного средства (50) регулировки нагрузки пружин содержит управляющий рычаг (61), выполненный с возможностью поворота непрерывно или в заранее заданное число положений, причем указанный управляющий рычаг (61) соединен с указанным ползунком (33, 33') с помощью соединительных элементов (64), таких как жесткие тяги и рычаги или гибкая проволока.
18. Стационарный водный велосипед, содержащий раму (11) и ротор (10) с переменным гидродинамическим сопротивлением, выполненный в соответствии с любым из предшествующих пунктов, отличающийся тем, что ротор (10) соединен с педалями (15) и расположен на указанной раме (11) в центральном положении с направленным вперед входным краем (13') лопастей (13), причем указанное средство (40) управления максимально возможным открытием и/или указанное средство (60) управления указанного централизованного средства (50) регулировки нагрузки пружин лопастей жестко соединено с указанной рамой (11).
| US 5690588 A, 25.11.1997 | |||
| US 5123641 A, 23.06.1992 | |||
| US 5795270 A, 18.08.1998 | |||
| Нагрузочный механизм устройства для тренировки гребцов | 1989 |
|
SU1643027A1 |

