Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известно устройство подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления (см. Патент по заявке № 201114980 AU от 05.01.2012 г.), которое включает вертикальный корпус хирургического стола с возможностью изменения высоты, который закреплен в нижней его части к основанию стола, выполненного в виде полого цилиндра с внешними ребрами жесткости и неподвижно расположенного на поверхности пола. При этом в основание стола введен дополнительный полый цилиндр с внешними ребрами жесткости, в котором закреплена нижняя цилиндровая часть устройства подъема трех корпусов с внешней сферической поверхностью для диагностических и хирургических элементов, при этом устройство подъема выполнено в виде первой и второй частей с возможностью совместимого крепления, между которыми в верхней их части закреплен осевой стержень с двумя разнесенными подшипниками, на которых закреплены три корпуса с внешней сферической поверхностью и объединены между собой общей шестеренкой, которая функционально связана с шестеренкой привода с редуктором, закрепленным на устройстве подъема для их совместимого вращения (прототип).
Недостатком известного устройства подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы является ограничение его функциональных возможностей, поскольку не могут быть одновременно использованы как диагностические, так и хирургические исполнительные элементы сферических робототехнических систем.
Техническим результатом предложенного изобретения является усовершенствование известного устройства подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы для проведения как хирургических процедур, так и диагностики.
Указанный технический результат достигается следующим устройством.
Устройство подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления, включает устройство разворота и смещения, осевой стержень с двумя разнесенными подшипниками, на которых закреплены три корпуса с внешней сферической поверхностью с общей шестеренкой, которая функционально связана с шестеренкой привода с редуктором, при этом в устройство подъема введен линейный привод, выдвижная часть которого является осевым стержнем и ориентирована вертикально с подшипниками в нижней его части, а в верхней выдвижной части закреплен привод с редуктором, а корпус линейного привода функционально соединен с ротором привода, статорная часть которого зафиксирована в устройстве разворота и смещения робототехнической системы.
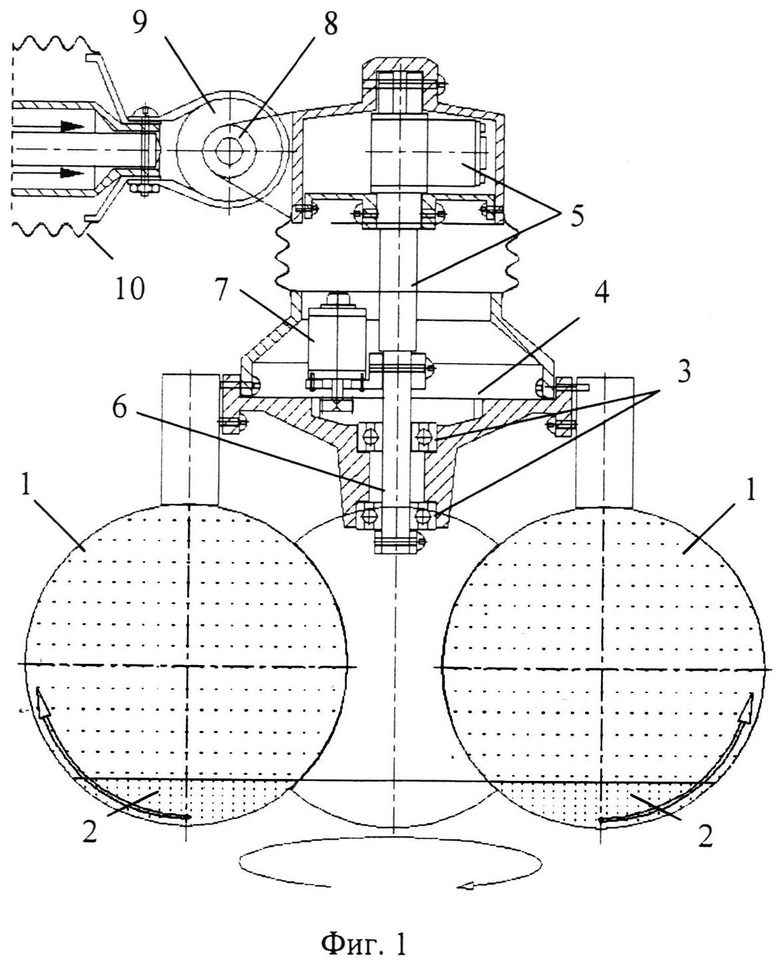
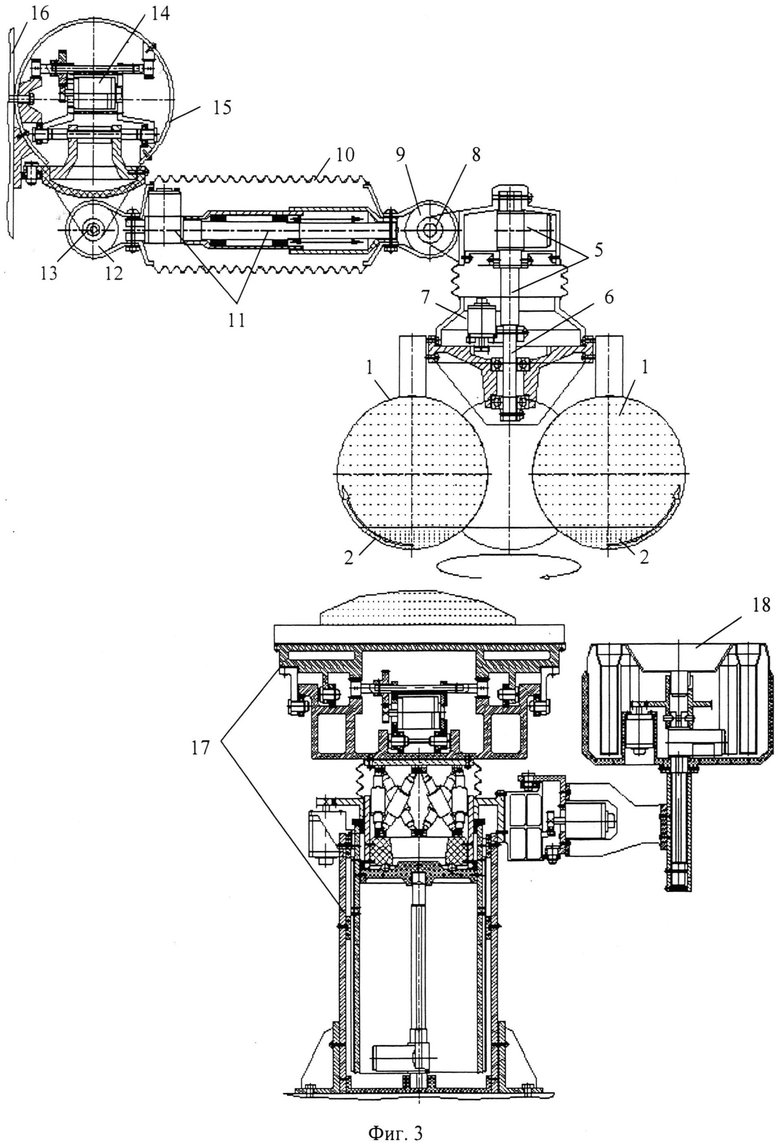
На фиг.1 изображено устройство подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления. На фиг.2 и 3 изображено позиционное положение трех корпусов с внешней сферической поверхностью с диагностическими, реанимационными и хирургическими исполнительными элементами в настенном варианте для продольного перемещения вдоль хирургического стола.
Устройство подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления, включающее три корпуса с внешней сферической поверхностью 1, в которых нижние части 2 выполнены с возможностью смещения для выхода диагностических, реанимационных и хирургические исполнительных элементов. При этом устройство разворота и смещения включает осевой стержень с двумя разнесенными подшипниками 3, которые функционально связаны с общей шестеренкой 4, на которой закреплены три корпуса 1 с внешней сферической поверхностью. При этом в устройство разворота и смещения введен линейный привод 5, выдвижная часть 6 которого является осевым стержнем и ориентирована вертикально с подшипниками 3 в нижней его части, а в верхней выдвижной части закреплен привод с редуктором 7, шестеренка которого функционально связана с общей шестеренкой 4. А корпус линейного привода 5 функционально соединен с ротором 8 привода 9, статорная часть которого зафиксирована в устройстве продольного смещения 10, которое включает (фиг.2) линейный привод 11, корпус которого зафиксирован на приводе с редуктором 12, ротор 13 которого функционально соединен с устройством продольного смещения 14, расположенного в цилиндрическом корпусе 15 с пазом в его нижней части, закрепленном на стене 16. При этом (фиг.3) три корпуса с внешней сферической поверхностью 1 позиционно расположены над хирургическим столом 17 и инструментальным столом 18.
Устройство подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления в данном исполнении может быть одновременно использовано для проведения хирургической операции и реанимации, поскольку (фиг.3) позиционное положение над хирургическим столом 17 и инструментальным столом 18 трех корпусов 1 с внешней сферической поверхностью, в которых находятся исполнительные элементы робототехнической системы, позволяет их использовать одновременно, так как нижние части 2 трех корпусов 1 с внешней сферической поверхностью выполнены с возможностью смещения для выхода диагностических, реанимационных и хирургические исполнительных элементов. А для этого введено устройство разворота и смещения, включающее осевой стержень с двумя разнесенными подшипниками 3, которые функционально связаны с общей шестеренкой 4, на которой закреплены три корпуса 1 с внешней сферической поверхностью. При этом в устройство разворота и смещения введен линейный привод 5 для корректировки позиционного положения трех корпусов 1, выдвижная часть 6 которого является осевым стержнем и ориентирована вертикально с подшипниками 3 в нижней его части, а в верхней выдвижной части закреплен привод с редуктором 7, шестеренка которого функционально связана с общей шестеренкой 4 также для корректировки позиционного положения исполнительных элементов. А корпус линейного привода 5 функционально соединен с ротором 8 привода 9, статорная часть которого зафиксирована в устройстве продольного смещения 10 также для необходимой корректировки исполнительных элементов, которое включает (фиг.2) линейный привод 11, корпус которого зафиксирован на приводе с редуктором 12, ротор 13 которого функционально соединен с устройством продольного смещения 14, расположенным в цилиндрическом корпусе 15 с пазом в его нижней части, закрепленным на стене 16. При этом хирургический стол 17 ориентирован вдоль цилиндрического корпуса 15, что позволяет выполнять смещение исполнительных элементов в сферических корпусах в любое позиционное положение над ним.
Использование предложенного технического решения позволяет расширить функциональные возможности устройства подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления появляется возможность одновременного использования исполнительных элементов нескольких сферических корпусов.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Устройство подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления включает устройство разворота и смещения, осевой стержень с двумя разнесенными подшипниками, на которых закреплены три корпуса с внешней сферической поверхностью с общей шестеренкой, которая функционально связана с шестеренкой привода с редуктором, при этом в устройство подъема введен линейный привод, выдвижная часть которого является осевым стержнем и ориентирована вертикально с подшипниками в нижней его части, а в верхней выдвижной части закреплен привод с редуктором, а корпус линейного привода функционально соединен с ротором привода, статорная часть которого зафиксирована в устройстве разворота и смещения робототехнической системы. 3 ил.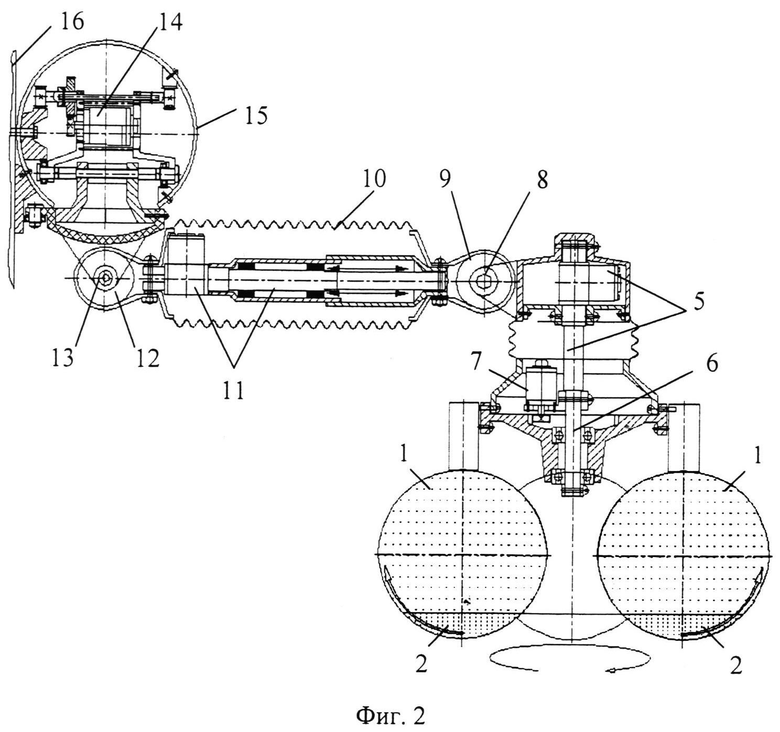
Устройство подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления, включающее устройство разворота и подъема, осевой стержень с двумя разнесенными подшипниками, на которых закреплены три корпуса с внешней сферической поверхностью с общей шестеренкой, которая функционально связана с шестеренкой привода с редуктором, отличающийся тем, что в устройство подъема введен линейный привод, выдвижная часть которого является осевым стержнем и ориентирована вертикально с подшипниками в нижней его части, а в верхней выдвижной части закреплен привод с редуктором, а корпус линейного привода функционально соединен с ротором привода, статорная часть которого зафиксирована в устройстве разворота и смещения робототехнической системы.
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Модуль промышленного робота | 1986 |
|
SU1348165A1 |
| US 5775171 A, 07.07.1998 | |||

