Изобретение относится к медицинской технике и может быть использовано в робототехнической системе при выполнении различных медицинских процедур.
Известно устройство подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления (см. патент по заявке № u 201114980 AU от 05.01.2012 г.), которое включает вертикальный корпус хирургического стола с возможностью изменения высоты, который закреплен в нижней его части к основанию стола, выполнен в виде полого цилиндра с внешними ребрами жесткости и неподвижно расположен на поверхности пола. При этом в основание стола введен дополнительный полый цилиндр с внешними ребрами жесткости, в котором закреплена нижняя цилиндровая часть устройства подъема трех корпусов с внешней сферической поверхностью для диагностических и хирургических элементов, при этом устройство подъема выполнено в виде первой и второй частей с возможностью совместимого крепления, между которыми в верхней их части закреплен осевой стержень с двумя разнесенными подшипниками, на которых закреплены три корпуса с внешней сферической поверхностью и объединены между собой обшей шестеренкой, которая функционально связана с шестеренкой привода с редуктором, закрепленным на устройстве подъема для их совместимого вращения (прототип).
Недостатком известного устройства подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы является ограничение его функциональных возможностей, поскольку не могут быть одновременно использованы как диагностические, так и хирургические исполнительные элементы сферических робототехнических систем.
Техническим результатом предложенного изобретения является усовершенствование известного устройства захвата для ориентированного приема и двойного возвратно-поступательного разворота хирургических инструментов и диагностических устройств, функционально связанных с операционным столом с компьютерным управлением.
Указанный технический результат достигается следующим устройством.
Устройство продольного возвратно-поступательного настенного смещения сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления, включающее устройство зажима операционных элементов с возможностью двух разворотов и соединенное посредством первого привода, выполняющего функцию шарнира, с устройством промежуточного разворота, который включает второй привод, выполняющий также функцию шарнира, соединенного с дополнительным устройством осевого разворота зажима, при этом введен линейный привод, корпус которого закреплен в сферическом корпусе робототехнической системы, а на выдвижной части линейного привода посредством двух планок закреплен привод с редуктором, в котором внешняя часть редуктора закреплена с одной планкой, а статорная часть привода с редуктором посредством осевого стержня соединена с возможностью вращения со второй планкой, при этом корпус статора соединен с дополнительным устройство осевого разворота зажима.
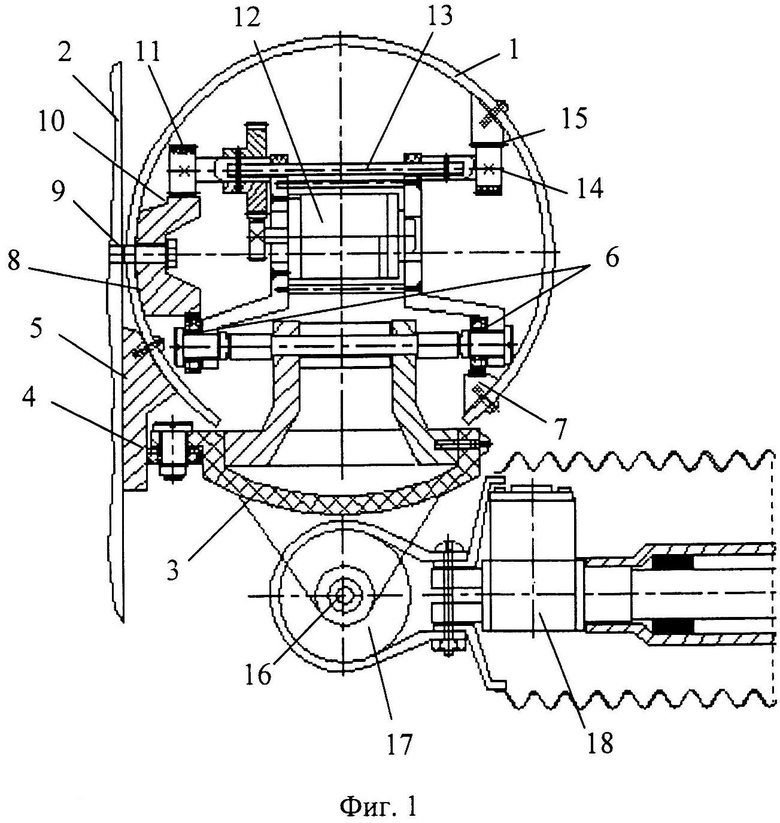
На фиг.1 изображено устройство продольного возвратно-поступательного настенного смещения сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления.
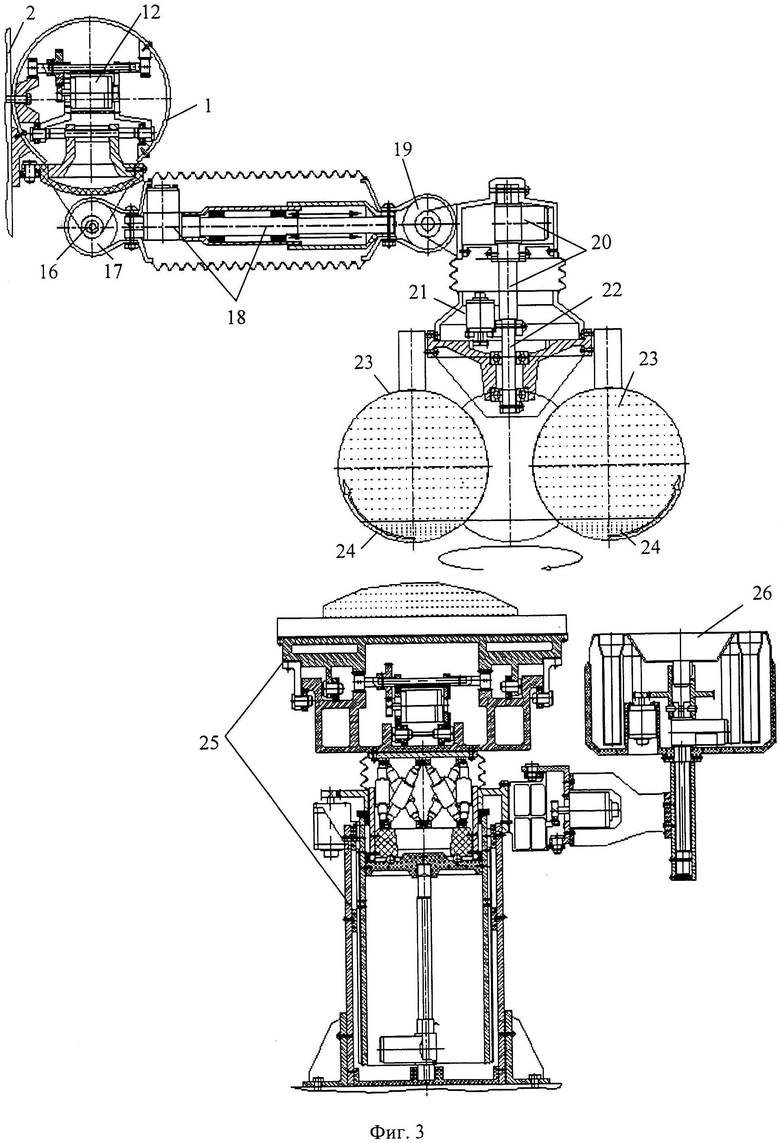
На фиг.2 и 3 изображена робототехническая система операционного стола с возможностью информационно-компьютерного управления.
В устройство продольного возвратно-поступательного настенного смещения сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления введена цилиндрическая направляющая 1, которая зафиксирована вдоль стены 2 и в нижней части которой выполнен продольный паз, где расположена нижняя часть 3 устройства продольного возвратно-поступательного смещения с зафиксированным опорным подшипником 4, функционально связанным с продольной планкой 5, которая зафиксирована с нижней части цилиндрической направляющей 1, а в верхней части устройства продольного возвратно-поступательного смещения последовательно расположены две пары подшипников 6, смещенных относительно друг друга, и функционально связанные с двумя продольными опорными направляющими 7 и 8, одна из которых вместе с цилиндрической направляющей 1 зафиксирована (9) вдоль стены 2 и на ее верхней части расположена зубчатая поверхность 10, функционально связанная с первой шестеренкой 11 привода 12 продольного смещения, на противоположной оси 13 которой расположена вторая шестеренка 14, функционально связанная со второй продольной зубчатой поверхностью 15 планки, которая закреплена внутри верхней части цилиндрической направляющей 1, при этом нижняя часть 3 устройства продольного возвратно-поступательного смещения закреплена на оси 16 ротора привода 17 разворота. А для возвратно-поступательного смещения введен линейный привод 18, подвижная часть которого (фиг.2) зафиксирована на внешней части ротора второго привода 19, ротор которого соединен с верхней частью корпуса линейного привода 20, на подвижной части которого закреплен привод с редуктором 21, функционально связанный с общей шестеренкой для совместного вращения сферических корпусов 23 диагностико-хирургической и реанимационной робототехнической системы с открывающейся нижней частью 24. При этом (фиг.3) нижние части 24 сферических корпусов позиционно расположены над хирургическим столом 25 и инструментальным столом 26.
Устройство продольного возвратно-поступательного настенного смещения сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления в данном исполнении может быть одновременно использовано для проведения хирургической операции и реанимации, поскольку (фиг.3) позиционное положение над хирургическим столом 25 и инструментальным столом 26 трех корпусов 23 с внешней сферической поверхностью, в которых находятся исполнительные элементы робототехнической системы, позволяет их использовать одновременно. Поскольку в нижней части 24 трех корпусов 23 с внешней сферической поверхностью выполнены с возможностью смещения для выхода диагностических, реанимационных и хирургические исполнительных элементов. А для этого (фиг.1) введена цилиндрическая направляющая 1, зафиксированная вдоль стены 2, в нижней части которой выполнен продольный паз, где расположена нижняя часть 3 устройства продольного возвратно-поступательного смещения с зафиксированным опорным подшипником 4, функционально связанного с продольной планкой 5, которая зафиксирована с нижней части цилиндрической направляющей 1, а в верхней части устройства продольного возвратно-поступательного смещения последовательно расположены две пары подшипников 6, смещенных относительно друг друга, и функционально связанные с двумя продольными опорными направляющими 7 и 8, одна из которых вместе с цилиндрической направляющей 1 зафиксирована 9 вдоль стены 2 и на ее верхней части расположена зубчатая поверхность 10, функционально связанная с первой шестеренкой 11 привода 12 продольного смещения, на противоположной оси 13 которой расположена вторая шестеренка 14, функционально связанная со второй продольной зубчатой поверхностью 15 планки, которая закреплена внутри верхней части цилиндрической направляющей 1, при этом нижняя часть 3 устройства продольного возвратно-поступательного смещения закреплена на оси 16 ротора привода 17 разворота. А для возвратно-поступательного смещения введен линейный привод 18, подвижная часть которого (фиг.2) зафиксирована на внешней части ротора второго привода 19, ротор которого соединен с верхней частью корпуса линейного привода 20, на подвижной части которого закреплен привод с редуктором 21, функционально связанный с общей шестеренкой для совместного вращения сферических корпусов 23 диагностико-хирургической и реанимационной робототехнической системы с открывающейся нижней частью 24. При этом хирургический стол 25 ориентирован вдоль цилиндрического корпуса 1, что позволяет выполнять смещение исполнительных элементов в сферических корпусах 23 в любое позиционное положение над ним.
Использование предложенного технического решения позволяет расширить функциональные возможности устройства подъема и разворота сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления и появляется возможность одновременного использования исполнительных элементов нескольких сферических корпусов.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Устройство продольного возвратно-поступательного настенного смещения сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления включает устройство зажима операционных элементов с возможностью двух разворотов, соединенное посредством первого привода, выполняющего функцию шарнира, с устройством промежуточного разворота, которое включает второй привод, выполняющий также функцию шарнира, соединенного с дополнительным устройством осевого разворота зажима, при этом введен линейный привод, корпус которого закреплен в сферическом корпусе робототехнической системы, а на выдвижной части линейного привода посредством двух планок закреплен привод с редуктором, в котором внешняя часть редуктора закреплена с одной планкой, а статорная часть привода с редуктором посредством осевого стержня соединена с возможностью вращения со второй планкой, при этом корпус статора соединен с дополнительным устройством осевого разворота зажима. 3 ил.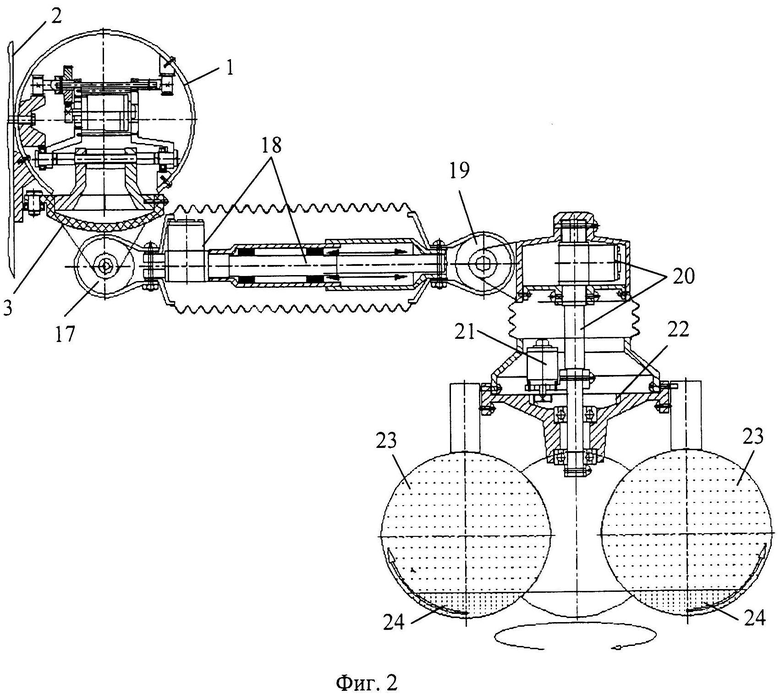
Устройство продольного возвратно-поступательного настеночного смещения сферической диагностико-хирургической и реанимационной робототехнической системы с возможностью информационно-компьютерного управления, отличающееся тем, что введена цилиндрическая направляющая, зафиксированная вдоль стены, в нижней части которой выполнен продольный паз, где расположена нижняя часть устройства продольного возвратно-поступательного смещения с зафиксированным опорным подшипником, функционально связанным с продольной планкой, которая зафиксирована с нижней части цилиндрической направляющей, а в верхней части устройства продольного возвратно-поступательного смещения последовательно расположены две пары подшипников, смещенных относительно друг друга, и функционально связанные с двумя продольными опорными направляющими, одна из которых вместе с цилиндрической направляющей зафиксирована вдоль стены и на ее верхней части расположена зубчатая поверхность, функционально связанная с первой шестеренкой привода продольного смещения, на противоположной оси которой расположена вторая шестеренка, функционально связанная со второй продольной зубчатой поверхностью планки, которая закреплена внутри верхней части цилиндрической направляющей, при этом нижняя часть устройства продольного возвратно-поступательного смещения закреплена на оси ротора привода разворота робототехнической системы для совместного возвратно-поступательного смещения.
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Модуль промышленного робота | 1986 |
|
SU1348165A1 |
| US 5775171 A, 07.07.1998 | |||

