Изобретение относится к машиностроению, в частности к промышленным роботам для автоматизации технологических процессов.
Цель изобретения - расширение функциональных возможностей за счет увеличения диапазона регулирования скорости линейного перемешения гильзы при увеличении осевого усилия, передаваемого ею.
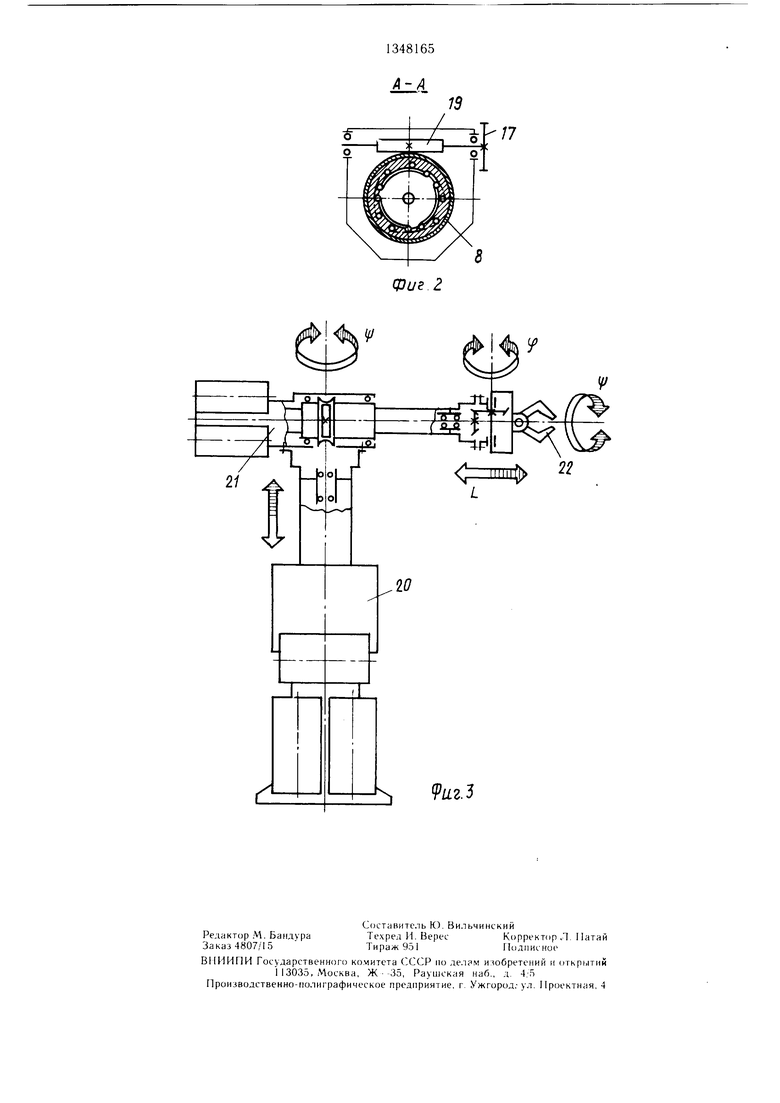
На фиг. 1 изображена кинематическая схема модуля; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - модульный робот с пятью степенями подвижности.
Модуль промышленного робота состоит из корпуса 1, в котором установлен с возможностью врашения ходовой винт 2, соеди- няюшийся с шлицевой гильзой 3 через неподвижно установленную в ней гайку 4, причем соединение ходового винта 2 с гайкой 4 может быть выполнено в виде шариковой винтовой пары. Внутри винта 2 установлен телескопический узел, состоящий из валов 5 и 6, передача крутяшего момента между которыми осуществляется со шпонкой 7. Вал 6 установлен с возможностью врашения по направлению ф в шлицевой гильзе 3, которая соединяется со шлицевой втулкой 8 с возможностью перемешения относительно нее в направлении L. Шлицевая втулка 8 установлена в корпусе 1 с возможностью враш,ения относительно него в направлении (f вместе с гильзой 3. Привод 9 кинематически связан с валом 5 через зубчатые колеса 10 и 11. Привод 12 кинематически связан с ходовым винтом 2 через зубчатые колеса 13 и 14. Привод 15 кинематически связан со шлицевой втулкой 8 через зубчатые колеса 16, 17 и червячную передачу 18, 19.
На фиг. 3 показана компоновка промышленного робота, у которого модуль подъема 20, модуль выдвижения 21 захватного органа 22 имеют описанную конструкцию.
Модуль промышленного робота работает следующим образом.
При вращении вала привода 9 движение передается через зубчатые колеса 10, 11 на вал 5, который через шпонку 7 передает врашение на вал 6 в направлении J5. Привод 12 через зубчатые колеса 13 и 14 передает вра (. на ходовой винт 2, который через шариковую винтовую передачу сообщает движение гайке 4, а вместе с ней и шлицевой гильзе 3 в направлении L. При этом гильза 3 через шлицевое соединение с втулкой 8 удерживается от поворота самотор- мозяшейся червячной передачей 18, 19. Привод 15 через зубчатые колеса 16, 17, червяк, колесо и шлицевую втулку 8 передает вращение на шлицевую гильзу 3 в направлении ф, при этом гильза 3, соединенная с ходовым винтом 2 через гайку 4, вращаясь
в направлении (, начнет перемещаться в направлении L, создавая возможность сложения движений на гильзе 3, при этом могут быть реализованы следующие движения;
привод 15 остановлен - шлицевая гильза 3 перемещается от привода 12 в направлении L; привод 12 остановлен - шлицевая гильза 3 от привода 15 вращается в направлении ф и одновременно перемещается в линейном направлении L, причем направление
линейного перемещения зависит от направления вращения; приводы 12 и 15 работают в одном направлении и с одинаковой скоростью - щлицевая гильза 3 вращается с той же скоростью, что и приводы, не перемещаясь в линейном направлении; приводы 12 и 15 работают в одном направлении, но с разной скоростью - шлицевая гильза 3 вращается со скоростью вращения привода 15, а также перемещается в линейном направлении L; оба привода 12 и 15 работают в разных направлениях - шлицевая гильза 3 вращается в направлении и со скоростью вращения привода 15 и перемещается в линейном направлении L; оба привода 12 и 15 работают в одном направлении, причем выходное звено привода 15 вращается равномерно, а выходное звено привода 12 вращается со скоростью, изменяющейся по синусоидальному закону - шлицевая гильза 3, вращаясь в направлении и со скоростью врашения привода 15, совершает возвратнопоступательное движение в направлении L; оба привода 12 и 15 работают в одном или разных направлениях по сложным законам - шлицевая гильза 3 совершает сложное движение.
Кроме того, при совместной работе приводов 12 и 15 на шлицевой гильзе 3 происходит сложение энергий этих (триводов, вследствие чего она развивает осевое усилие, равное сумме осевых усилий, получаемых от каждого привода в отдельности.
Формула изобретения
Модуль промышленного робота, содержащий корпус, гильзу, установленную в корпусе с возможностью перемещения вдоль своей оси, и привод с винтовой парой, гайка которой жестко связана с гильзой, отличающийся тем, что, с целью расщирения функциональных возможностей за счет увеличения диапазона регулирования скорости линейного перемещения гильзы при увеличении осевого усилия, передаваемого ею, корпус снабжен поворотной относительно него втулкой с индивидуальным приводом, на внутренней поверхности которой выполнены шлицы, при этом на наружной поверхности гильзы также выполнены щлицы, и гильза размещена в указанной втулке, а шлицы гильзы и втулки образуют соединение.
Фиг 2
S 9LLZ.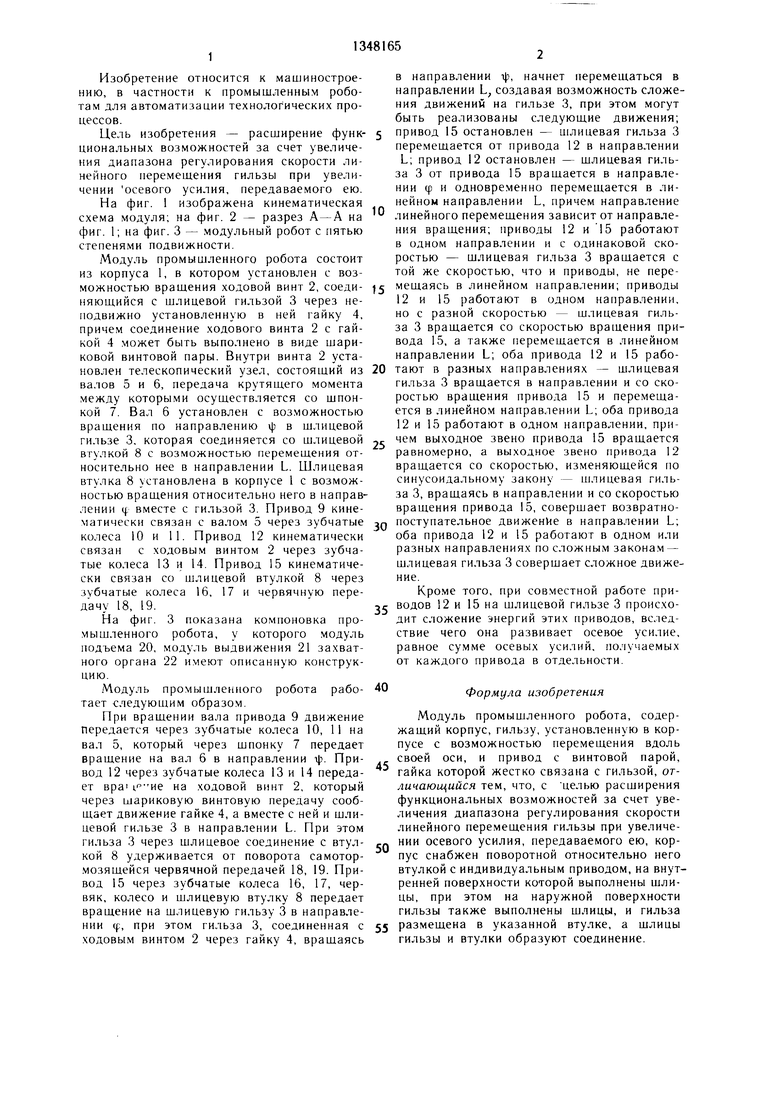
| название | год | авторы | номер документа |
|---|---|---|---|
| Инфузионный прибор для управления инъекционными шприцами | 1979 |
|
SU969274A1 |
| Шпиндельное устройство | 1982 |
|
SU1084117A1 |
| Устройство для перемещения резаков многорезаковой газорезательной машины | 1973 |
|
SU518291A1 |
| Суппорт зубофрезерного станка | 1983 |
|
SU1419831A2 |
| Электромоторный привод | 2017 |
|
RU2666383C1 |
| Промышленный робот | 1981 |
|
SU1149860A3 |
| КОЛОНКОВОЕ СВЕРЛО | 1950 |
|
SU97629A1 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
| СТАНОК ДЛЯ НАРЕЗАНИЯ ВИНТОВ С ПЕРЕМЕННЫМИ ШАГОМ И ДИАМЕТРОМ | 1963 |
|
SU216418A1 |
| РЕВОЛБВЕРНАЯ ГОЛОВКА | 1969 |
|
SU234106A1 |
И.юбретение относится к машиностроению, в частности к промышленным роботам для автоматизации технологических процессов. Цель изобретения - расширение функциональных возможностей за счет увеличения диапазона регулирования скорости линейного перемещения гильзы при увеличении осевого усилия, передаваемого ею. При вращении вала привода 9 движение передается через зубчатые колеса 10, 11 на вал 5, который через шпонку 7 передает вращение на вал 6 в направлении if. Привод 12 через зубчатые колеса 13, 14 передает Bpanieinie на ходовой винт 2, который чере.з шарико- винтовую передачу перемешает гайку 4 и шли- цевую гильзу 3 в направлении L. Привод 15 через зубчатые колеса 16, 17, червяк 18, колесо 19 и нктицевую втулку 8 передает B|ianie- ние па шлицевую ги.чьзу 3 в паправ. И нии f. Сложение движений пмицевой ги, 1ьзы 3 от совместного или раздельного действия приводов 12 и 15 позволяет получить раз,1ич- пые скорости и перемещения выходного звепа, при этом мощности указанных приводов суммируются. 3 ил. (Л со 4 00 о СП
| Про.мышлеиный робот с числовым программным управлением | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Руководство ио ыкс- плутации, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
