Область техники
Настоящее изобретение относится к устройству прерывания цепи для систем низкого напряжения с механизмом управления с улучшенными характеристиками по размерам и надежности.
Предшествующий уровень техники
Общеизвестным является, что устройства прерывания цепи низкого напряжения (т.е. при применении рабочего напряжения до 1000 В переменного тока/1500 В постоянного тока), такие как, например, автоматические прерыватели цепи, разъединители и контакторы, обычно называемые "переключающими устройствами" и в дальнейшем для простоты называемые прерывателями цепи, являются устройствами предназначенными для обеспечения возможности надежного функционирования определенных частей электрических систем и установленных нагрузок. Автоматические прерыватели цепи, например, обеспечивают то, чтобы номинальный ток мог протекать к различным пользователям, обеспечивая нагрузкам надежное соединение или разъединение от цепи, и также обеспечивая защищаемой схеме возможность автоматического изолирования от источника электроэнергии.
Также хорошо известно, что прерыватели цепи содержат корпус с одним или более электрическими полюсами, каждый из которых ассоциирован, по меньшей мере, с одной парой контактов, которые могут быть взаимно соединены и разъединены, и механизм управления, который вызывает относительное движение между парами контактов. Действие механизма управления на подвижных контактах традиционно выполняется при помощи главного вала, оперативно соединенного с подвижными контактами, или при помощи подвижной части, оперативно поддерживающей контакты. Механизм управления традиционно содержит поддерживающую рамку, которая поддерживает кинематическую цепь, которая состоит, по меньшей мере, из одного элемента, оперативно соединенного с подвижной частью и предоставляющего возможность ее перемещения.
Механизм управления обычно содержит, по меньшей мере, один расцепляющий элемент, который в целом приводится в действие устройством защиты в случае аномалии, такой как, короткое замыкание, возникающее в цепи, в которой установлен прерыватель цепи. Устройство защиты может быть теплового, термомагнитного или электронного типа, и оно прямо или косвенно активирует кинематическую цепь механизма управления, вызывая быстрое отделение контактов и обеспечивая автоматическое размыкание прерывателя цепи.
Кинематические цепи в традиционных механизмах управления состоят из операционных элементов, по меньшей мере, один из которых соединен с рамкой при помощи шарнирного соединения, состоящего из сквозного штыря, который соединяет стороны рамки вместе. Почти во всех случаях взаимное соединение между другими элементами в кинематической цепи также достигается подобным образом при помощи шарнирных соединений, обеспеченных штырями.
В известных решениях один из наиболее ключевых аспектов с точки зрения затрат на изготовление касается процедуры сборки прерывателя цепи. В большинстве случаев компоненты собираются 'на линии', т.е. один за другим, согласно логике, которая явно зависит от структуры прерывателя цепи. Время сборки отчасти определяется структурой механизма управления, который содержит большое количество компонентов относительно небольших размеров. Следовательно, существует потребность в развитии новых решений, которые обеспечат возможность очевидного уменьшения времени текущей сборки посредством по существу упрощения процедуры.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание устройства прерывания цепи для систем низкого напряжения, которое обеспечивает возможность преодолеть вышеупомянутые недостатки, и которое, в особенности, также будет иметь более короткое время сборки, чем у известных устройств.
Эта задача решается устройством прерывания цепи согласно пункту 1 и зависимых пунктов формулы изобретения.
Описание ниже ссылается исключительно в описательных целях к одиночному переключающему многополюсному устройству прерывания цепи для систем низкого напряжения. Очевидно, что принципы и технические решения, изложенные в описании идеи изобретения, являются применимыми для других типов устройств прерывания цепи, таких как двойные переключающие прерыватели цепи с различным количеством полюсов.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг. 1 изображает общий вид первого варианта осуществления устройства прерывания цепи согласно настоящему изобретению;
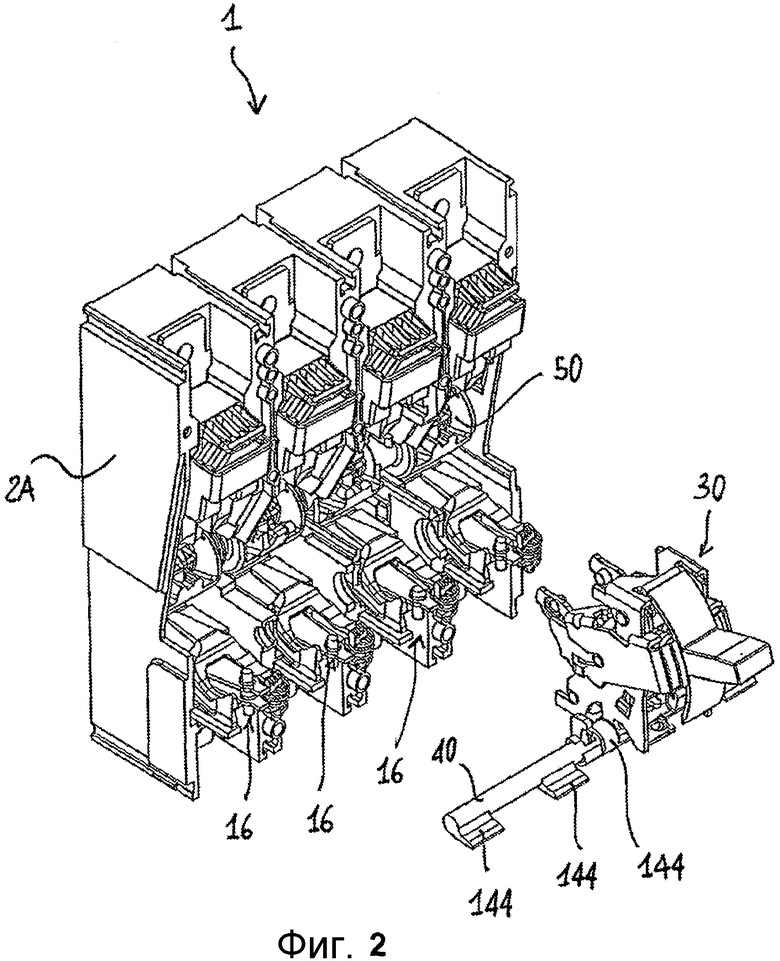
фиг. 2 изображает покомпонентный вид устройства прерывания цепи по фиг. 1;
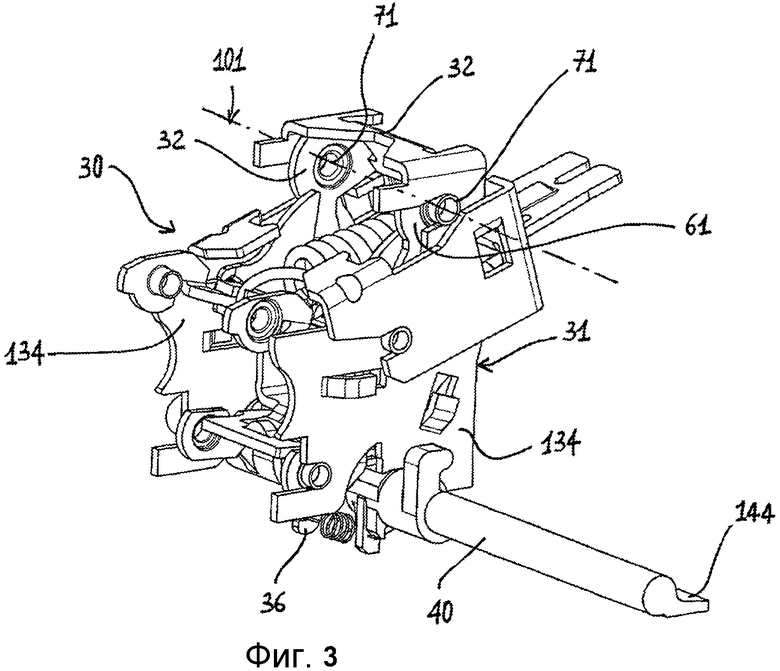
фиг. 3 изображает общий вид механизма управления и вала расцепления устройства 1 прерывания цепи по фиг. 1;
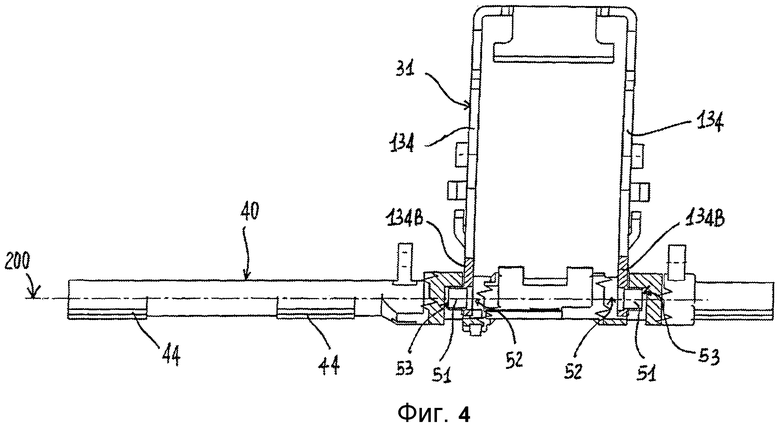
фиг. 4 изображает вид поперечного сечения блока, состоящего из поддерживающей рамки и вала расцепления устройства по фиг. 1;
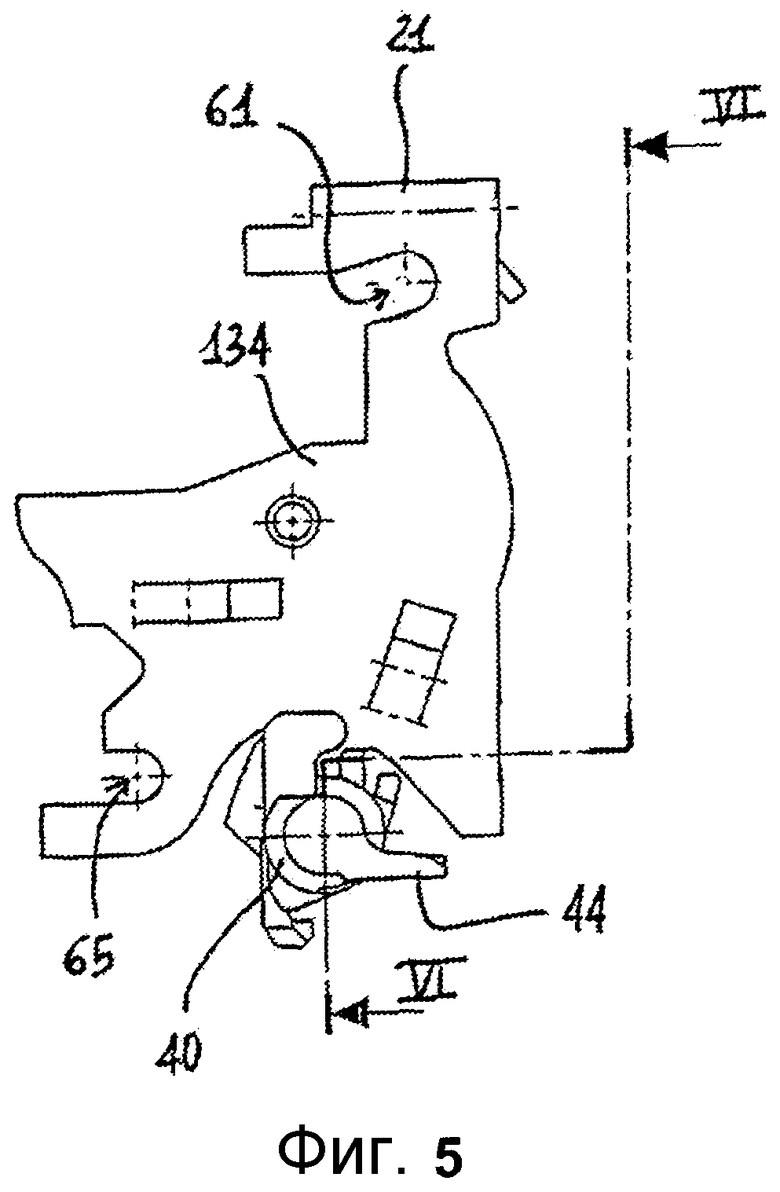
фиг. 5 изображает вид сбоку блока, состоящего из поддерживающей рамки и вала расцепления устройства по фиг. 1;
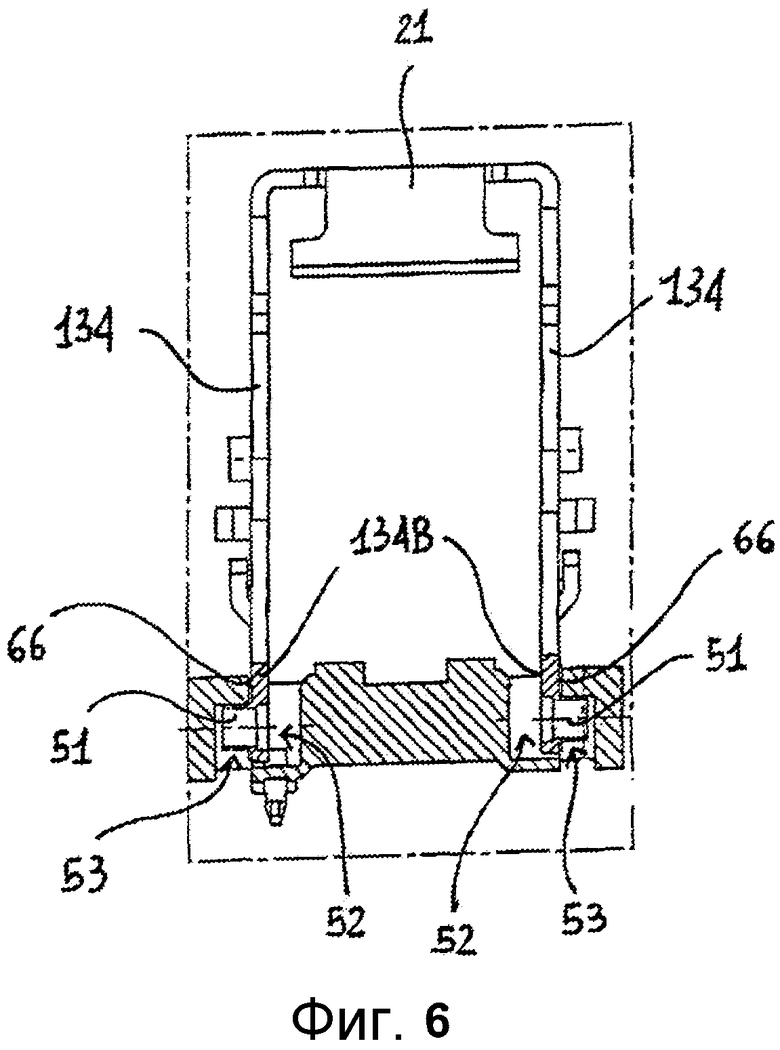
фиг. 6 изображает вид поперечного сечения по линии VI-VI фиг. 5;
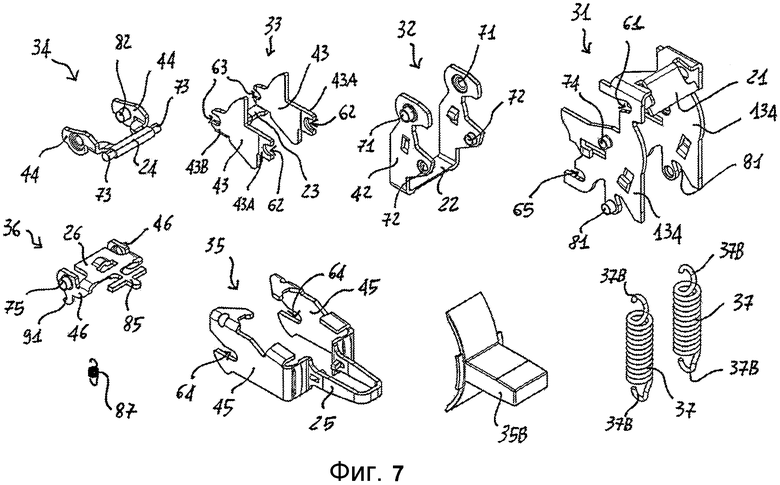
фиг. 7 изображает покомпонентный вид компонентов механизма управления в устройстве прерывания цепи, показанном на фиг. с 1 по 6;
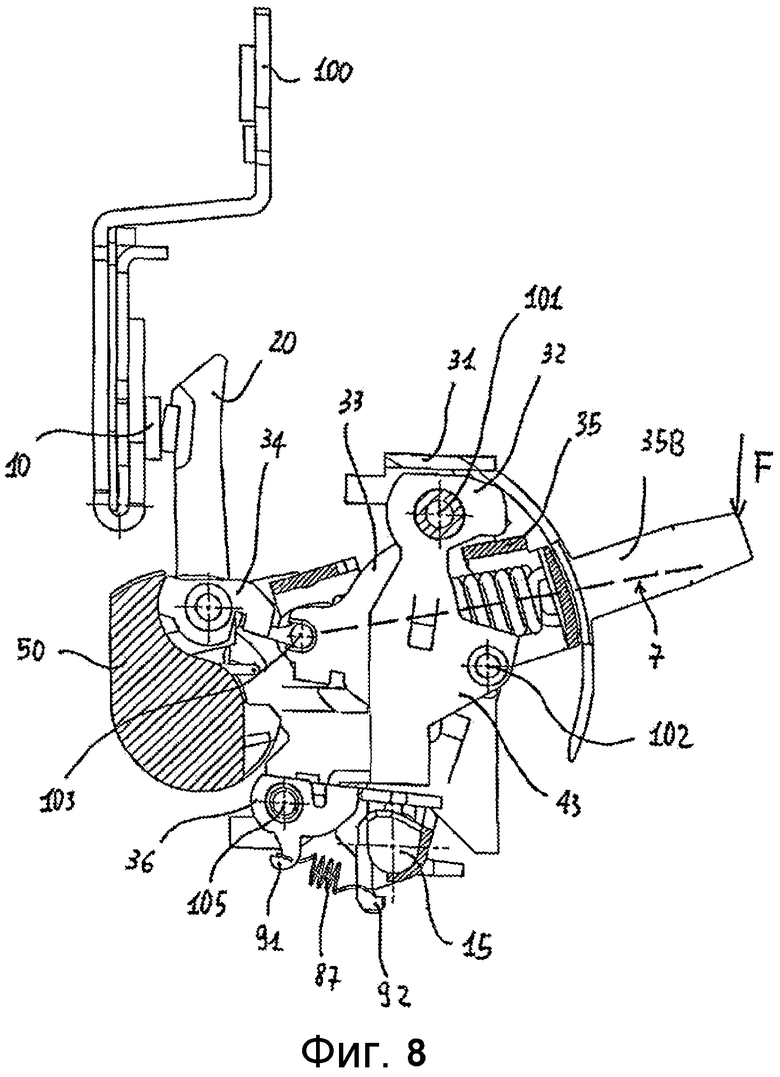
фиг. 8 изображает вид механизма управления с фиг. 1 в его замкнутой конфигурации;
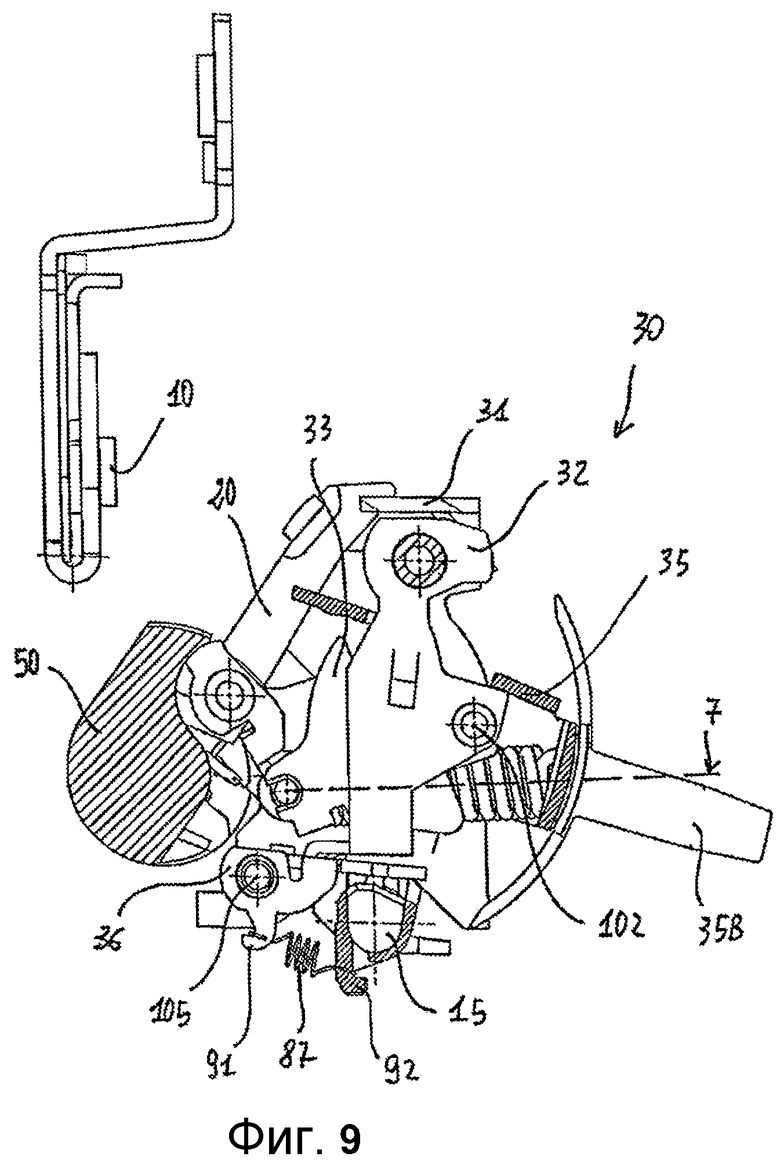
фиг. 9 изображает вид механизма управления с фиг. 1 в его разомкнутой конфигурации;
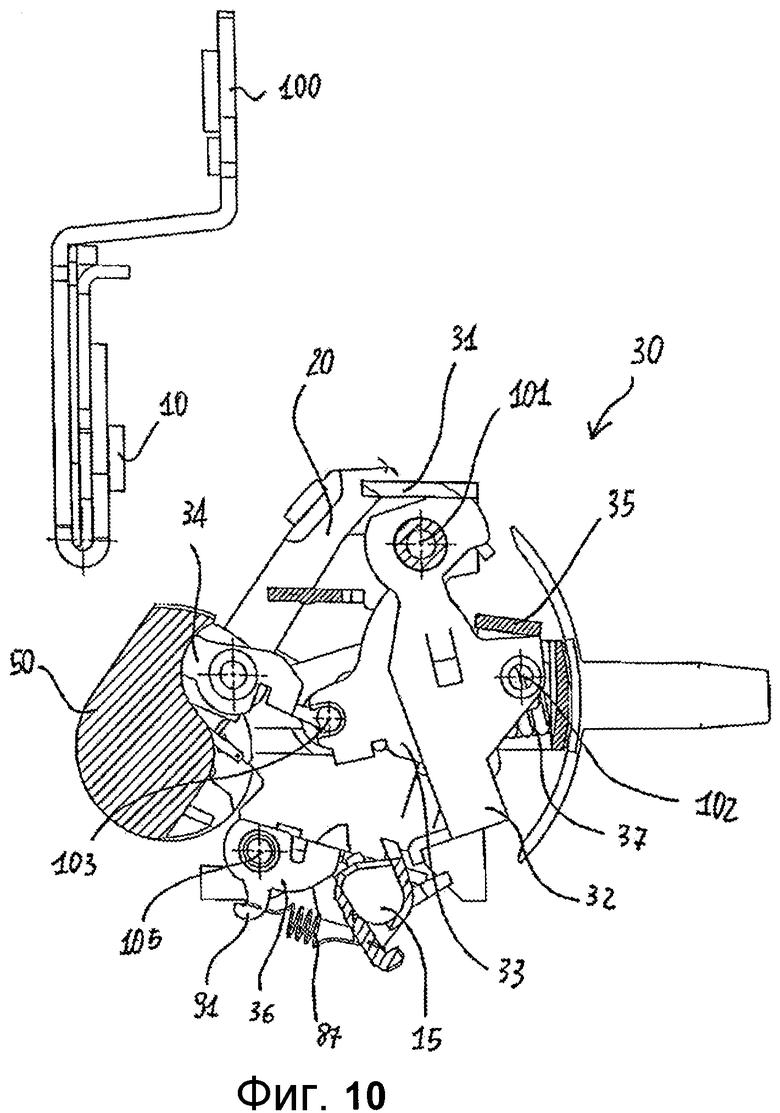
фиг. 10 изображает вид механизма управления с фиг. 1 в его расцепленной конфигурации;
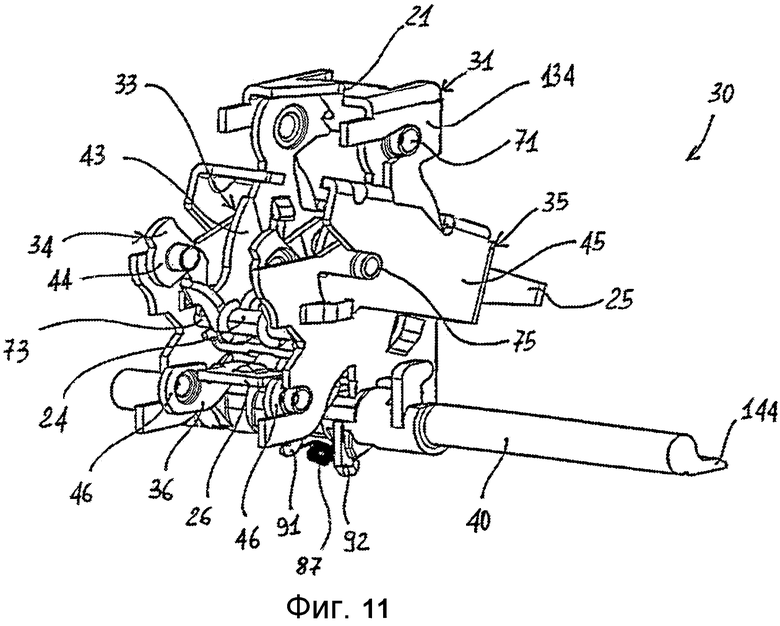
фиг. 11 изображает общий вид механизма управления с фиг. 9;
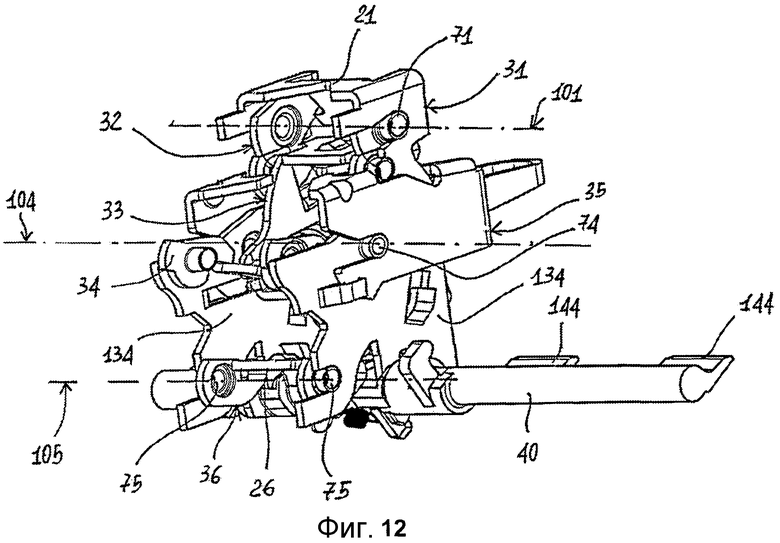
фиг. 12 изображает общий вид механизма управления с фиг. 10;
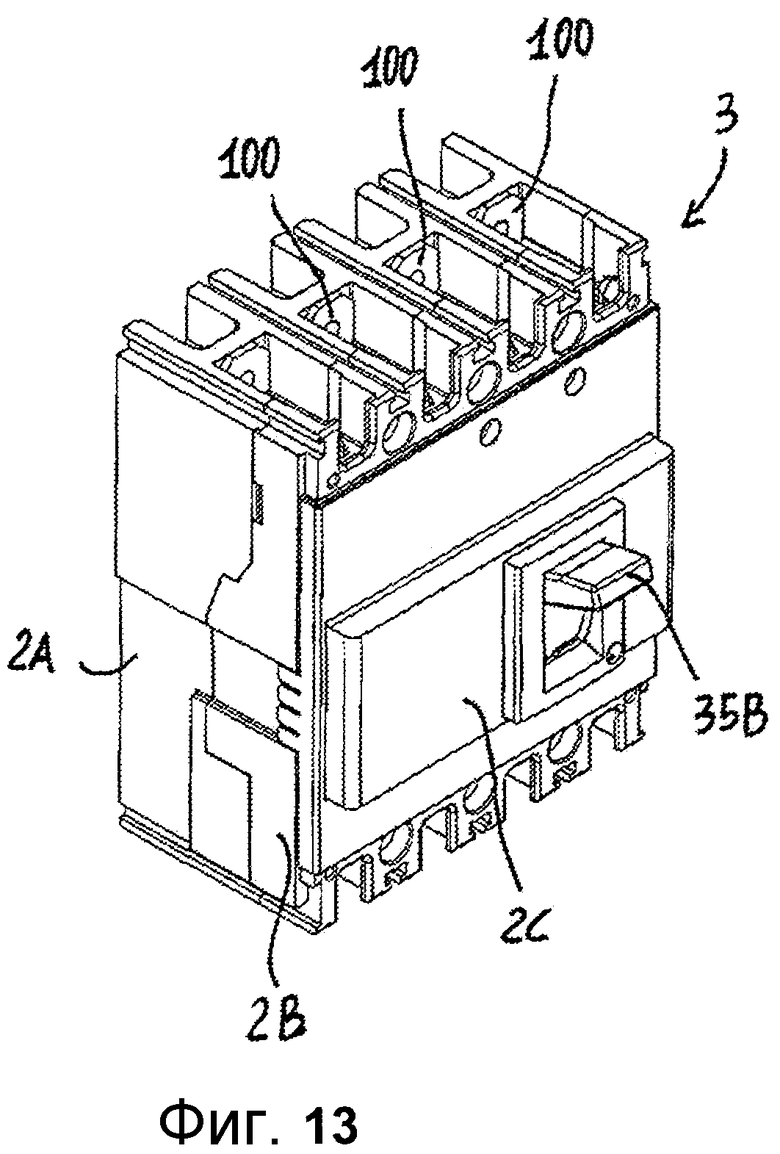
фиг. 13 изображает первый общий вид второго варианта осуществления устройства прерывания цепи согласно настоящему изобретению;
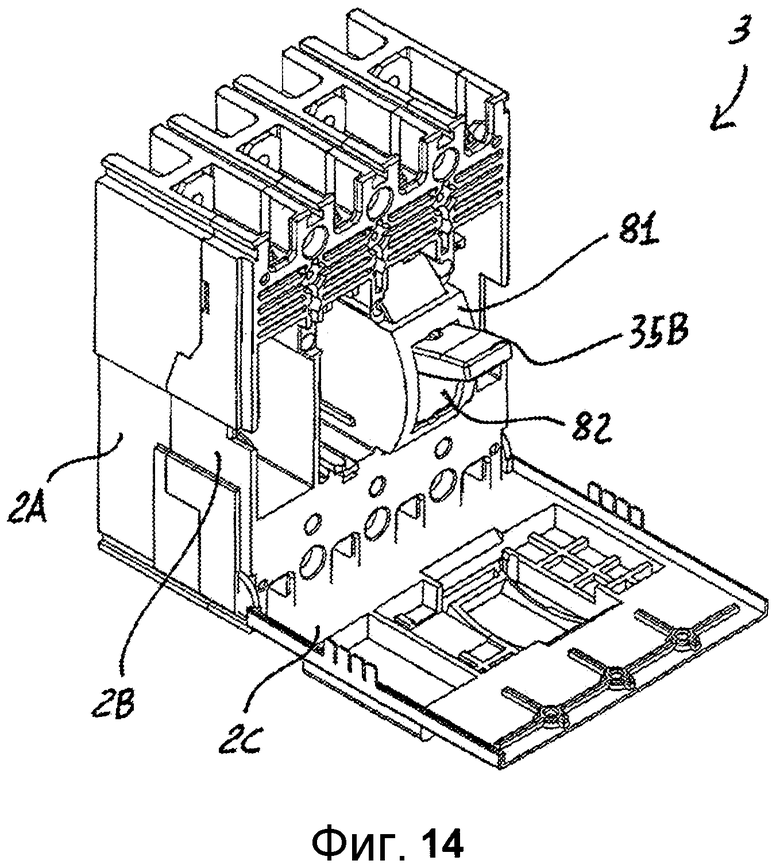
фиг. 14 изображает второй общий вид устройства с фиг. 13;
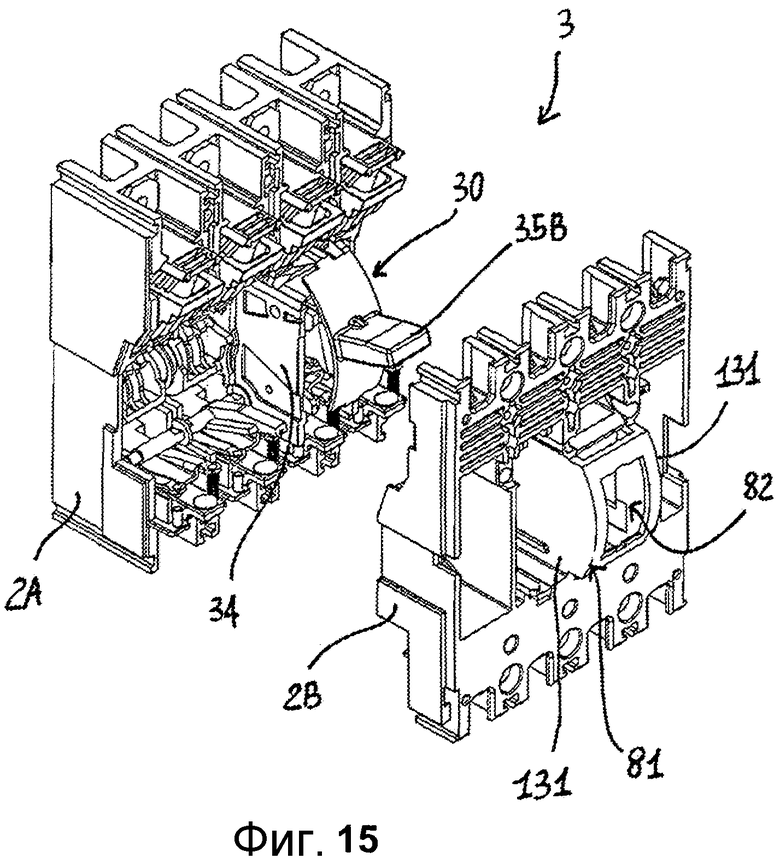
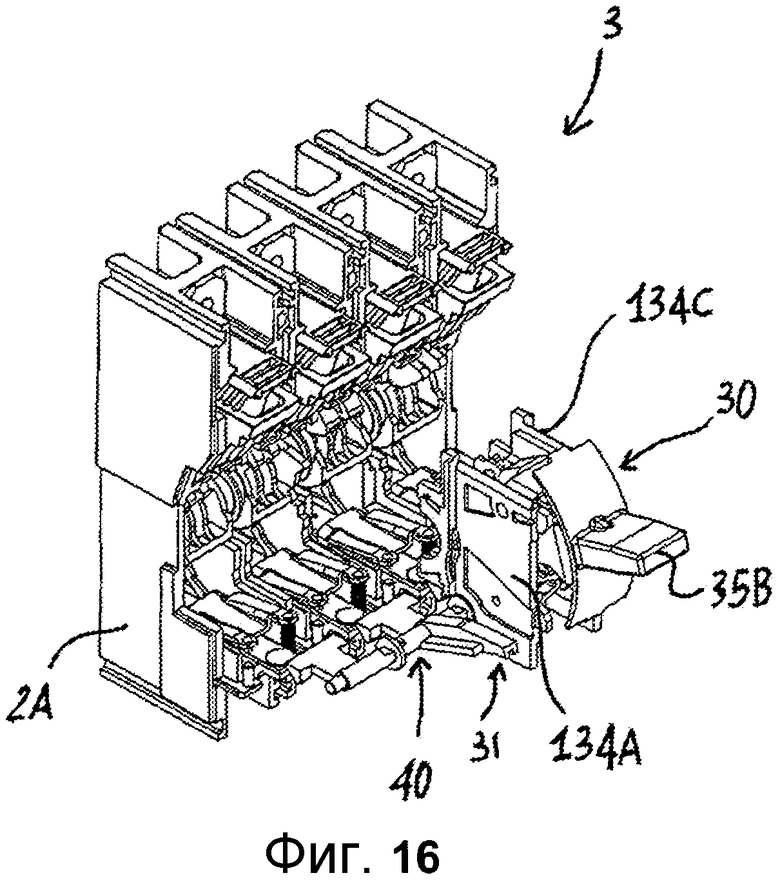
фиг. 15 и 16 изображают соответственно первый вид и второй покомпонентный вид устройства с фиг. 13;
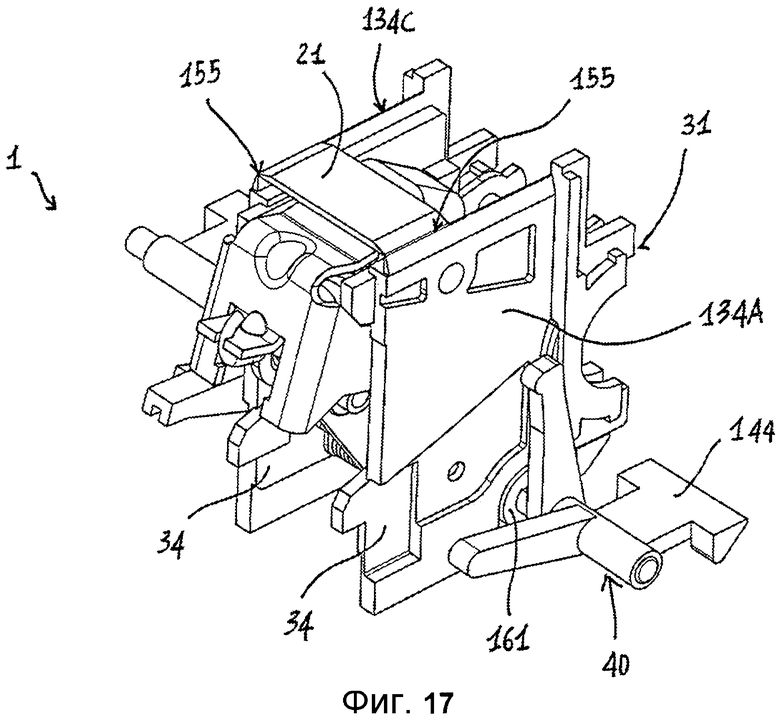
фиг. 17 изображает общий вид механизма управления в устройстве прерывания цепи, проиллюстрированного на фиг. 13-16;
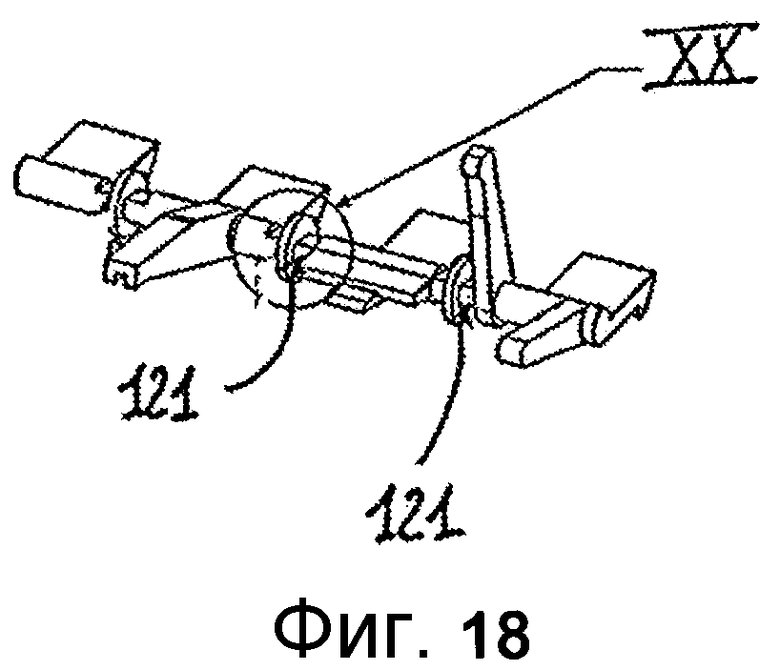
фиг. 18 изображает общий вид, показывающий вал расцепления устройства, проиллюстрированного на фиг. 13-16;
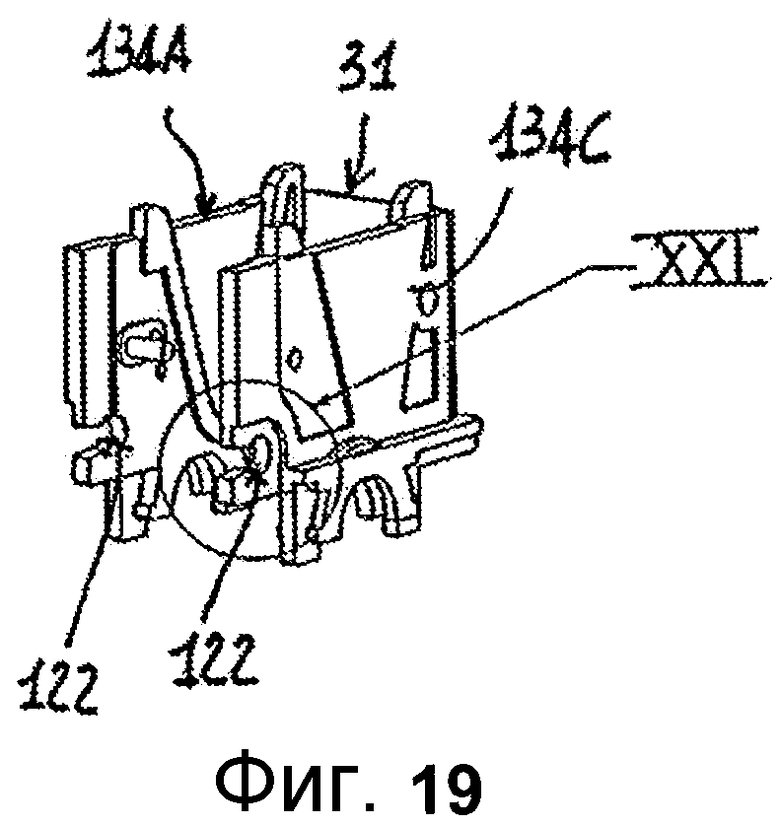
фиг. 19 изображает общий вид, относящийся к поддерживающей рамке механизма управления в устройстве, проиллюстрированном на фиг. 13-16;
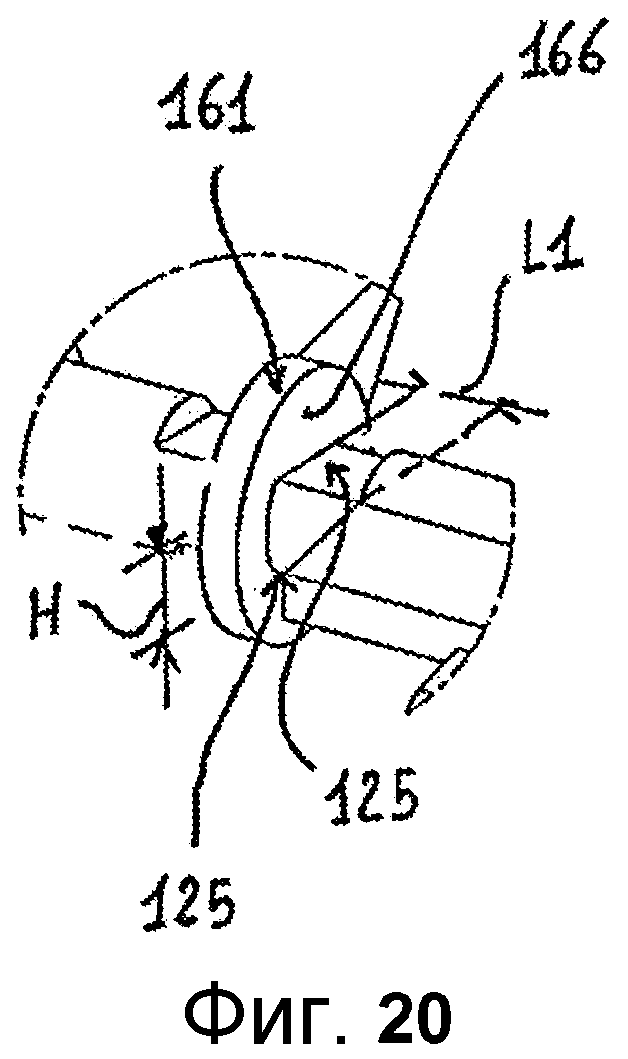
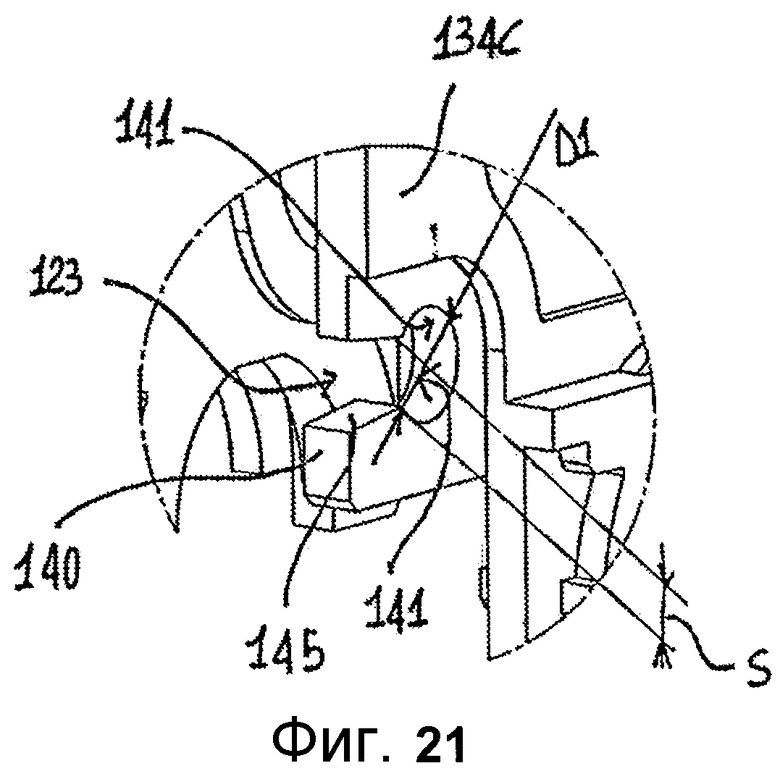
фиг. 20 и 21 изображают детализированные виды, соответственно показывающие детали XX и XXI на фиг. 18 и 19;
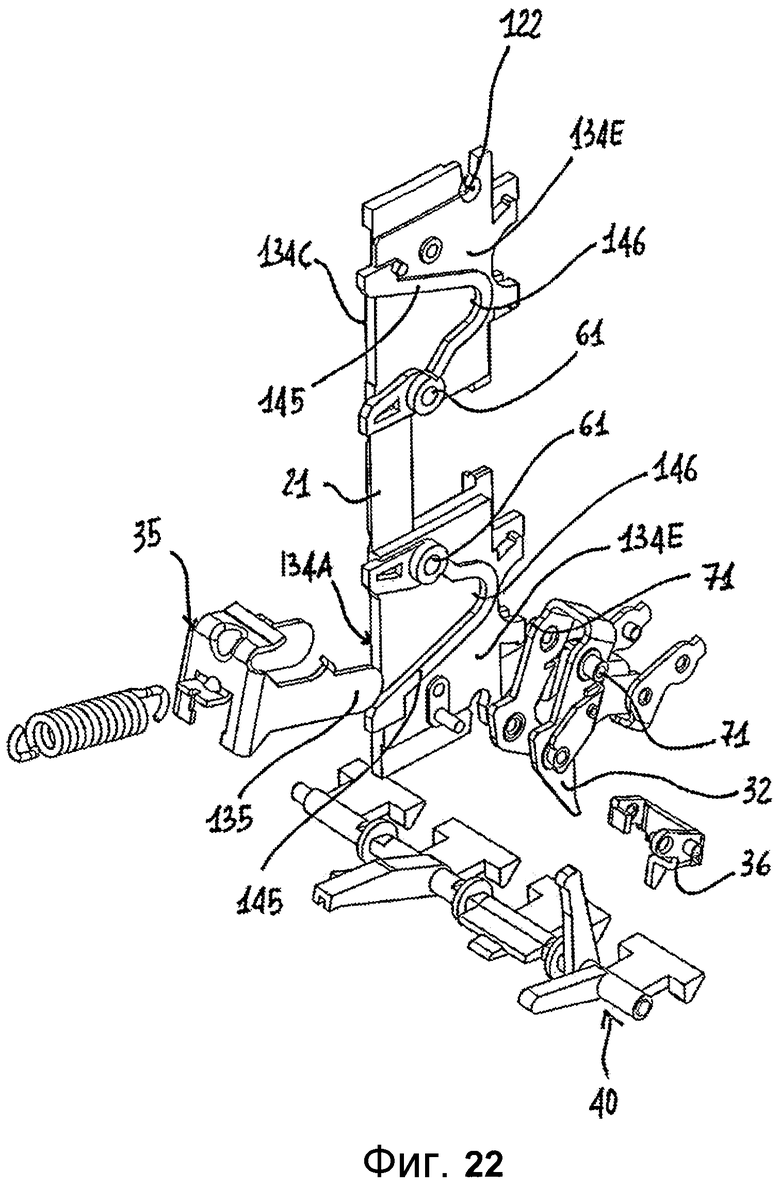
фиг. 22 изображает покомпонентный вид механизма управления в устройстве, проиллюстрированном на фиг. 13-16;
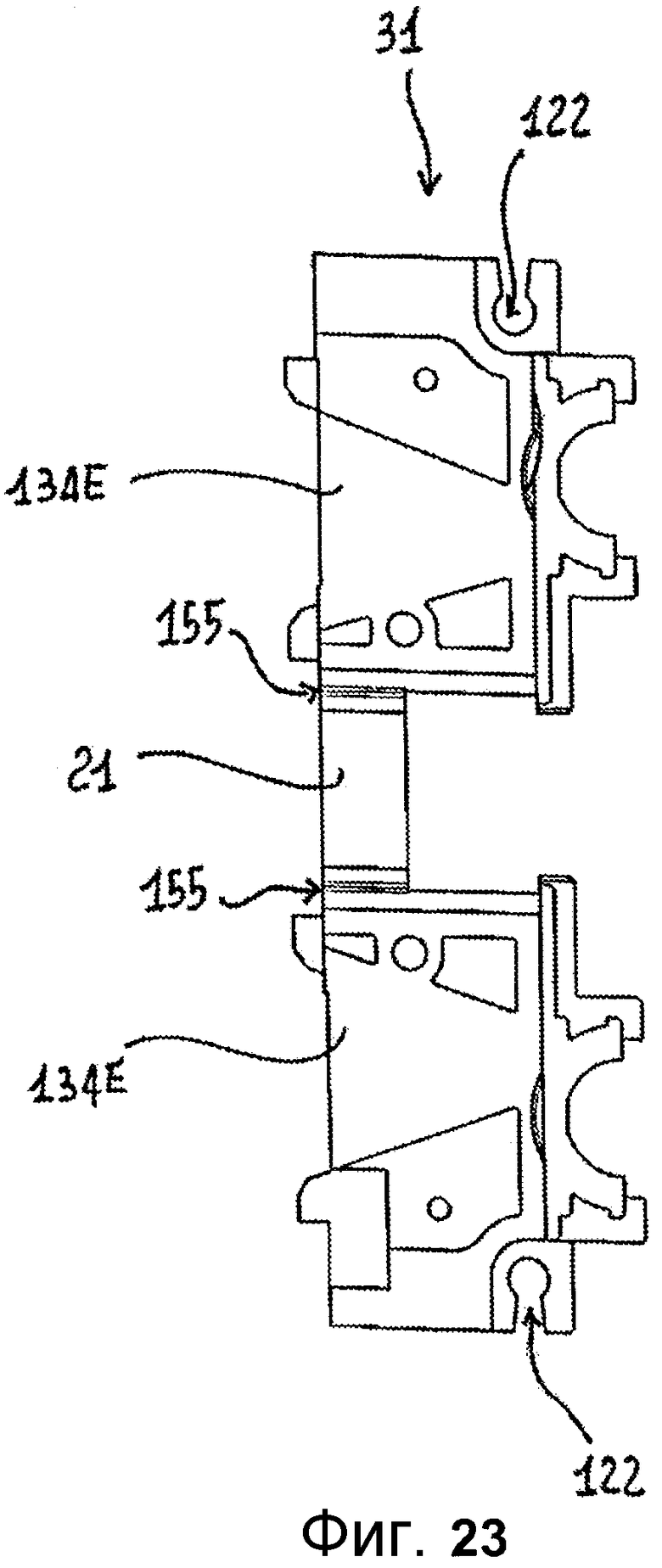
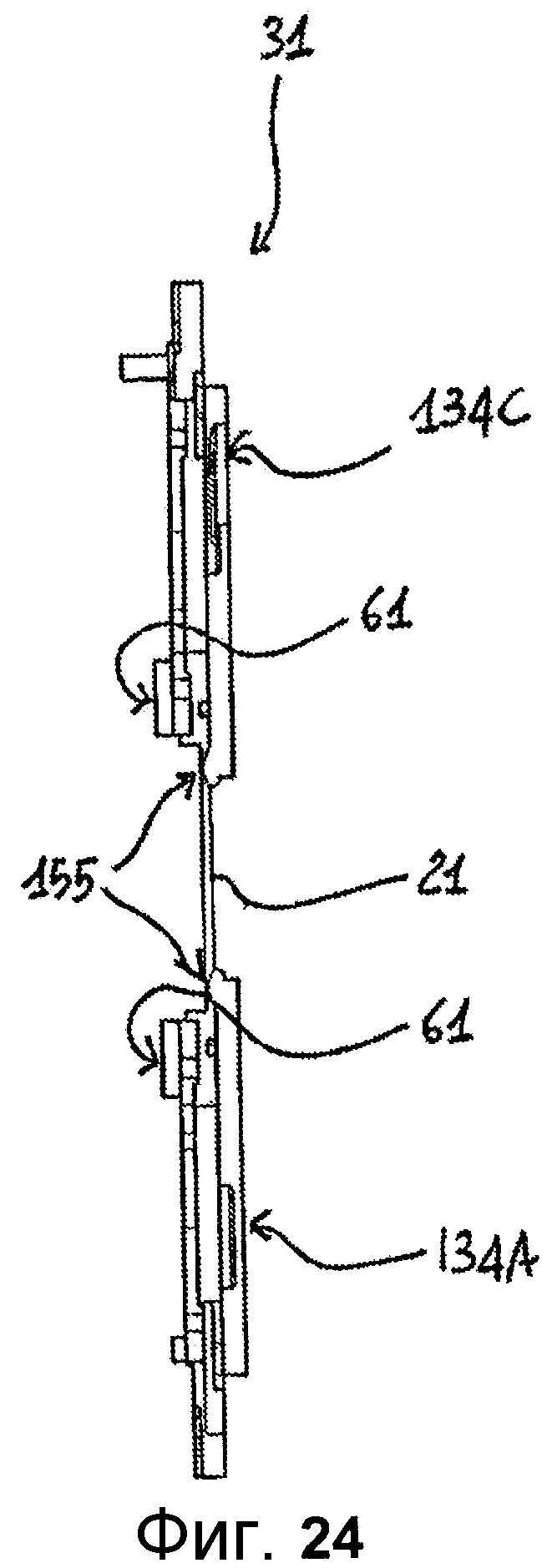
фиг. 23 и 24 изображают виды, относящиеся к поддерживающей рамке механизма управления устройства, проиллюстрированного на фиг. 13-16;
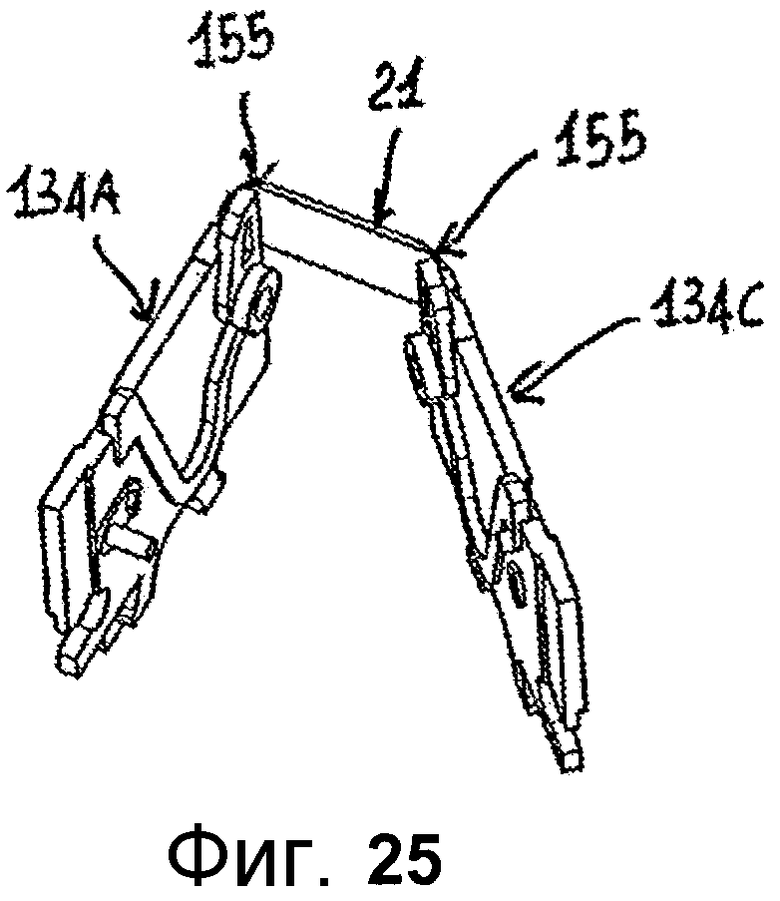
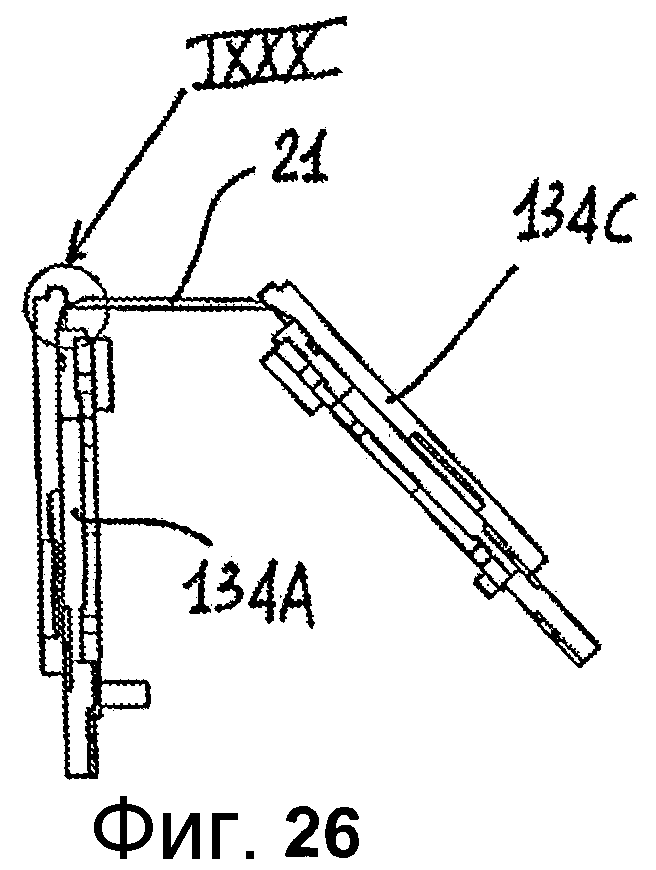
фиг. с 25 по 28 изображают стадии сборки механизма управления устройства прерывания цепи, проиллюстрированного на фиг. 13-16;
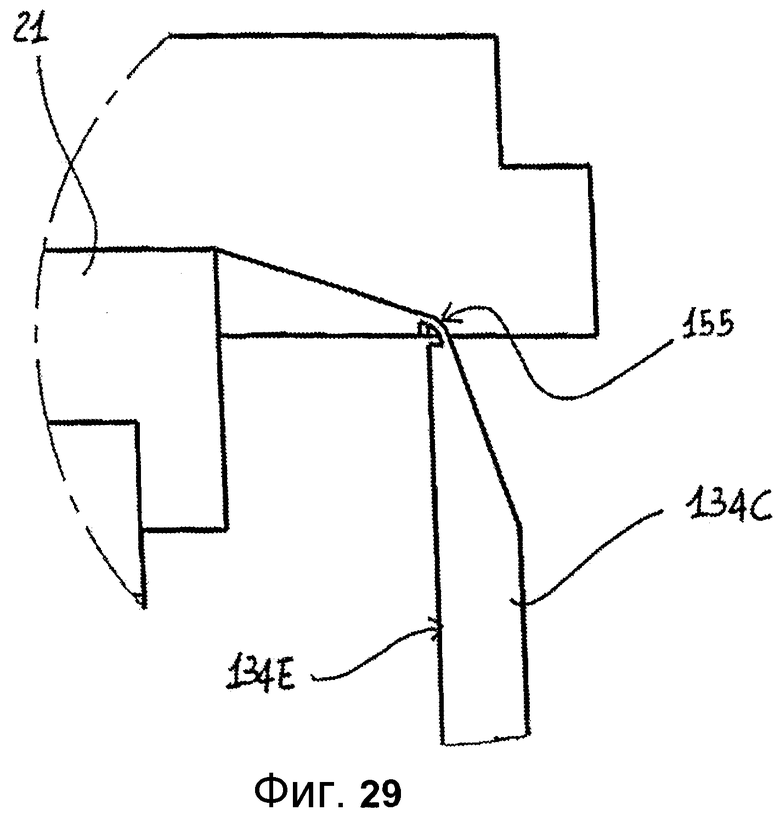
фиг. 29 изображает детализированный вид участка поддерживающей рамки, показанной на фиг. 26.
Описание предпочтительных вариантов воплощения изобретения
Устройство 1 прерывания цепи согласно настоящему изобретению содержит внешний корпус 2, содержащий для каждого полюса, по меньшей мере, один неподвижный контакт 10 и, по меньшей мере, один подвижный контакт 20, пригодный для взаимного соединения или разъединения. Устройство 1 прерывания цепи содержит механизм 30 управления, который оперативно соединен с, по меньшей мере, одним подвижным контактом 20, чтобы обеспечить возможность последующего перемещения между соединенным положением и разъединенным положением по отношению к соответствующему неподвижному контакту 10. Механизм 30 управления содержит поддерживающую рамку 31, которая поддерживает кинематическую цепь, оперативно соединенную с подвижным контактом 20 при помощи подвижной части 50, которая обеспечивает возможность его соединения или разъединения от неподвижного контакта 10.
Устройство 1 прерывания цепи содержит отключающее устройство, предусмотренное с валом 40 расцепления, который взаимодействует с механизмом 30 управления, чтобы обеспечить возможность кинематической цепи и, таким образом, спусковому механизму отсоединить подвижный контакт 20 от неподвижного контакта 10. Механизм 30 управления содержит множество элементов 31, 32, 33, 34, 35, 36 (см. фиг. 7, например), которые оперативно соединены для определения, по меньшей мере, одной кинематической цепи, которая оказывает воздействие на подвижные контакты 20 при помощи подвижной части 50. В целях настоящего изобретения термин 'кинематическая цепь' используется для указания набора элементов в механизме управления, которые соединены вместе для выполнения одной из функций (например, ручного или автоматического размыкания цепи), для которых был задуман механизм. Это означает, что могут существовать несколько кинематических цепей в механизме управления, причем каждая, например, предназначена для выполнения одной из этих функций.
Поддерживающая рамка 31 преимущественно содержит пару противолежащих сторон 134, взаимно соединенных при помощи первого поперечного соединительного участка 21. Согласно изобретению стороны 134 являются взаимно соединенными при помощи дополнительного средства соединения, которое определяет дополнительный поперечный соединительный участок в положении, отличном от положения, занимаемого первым поперечным соединительным участком 21. В этом варианте осуществления стороны 134 рамки являются взаимно прикрепленными в двух местах так, что они поддерживают устойчивое положение относительно друг друга. Это означает, что элементы кинематической цепи также неизменно поддерживают свои рабочие положения между сторонами 134 рамки.
Согласно предпочтительному варианту осуществления изобретения поперечное соединительное средство соединяет две стороны 134 вместе так, что дополнительный соединительный участок проходит в положении по существу спереди положения первого поперечного соединительного участка 21. Такое решение обеспечивает устойчивое и надежное соединение между сторонами 134, гарантируя устойчивость конструкции поддерживающей рамки 31, необходимую для надлежащего функционирования механизма 30 управления. Более того, описанное решение также является в особенности преимущественным с точки зрения сборки устройства 1 прерывания сети, поскольку механизм 30 управления может быть собран отдельно от остальной части прерывателя 1 цепи и может быть вставлен в него только в конце процедуры. На практике, возможность сборки механизма 30 управления перед сборкой прерывателя 1 цепи обеспечивает возможность экономии с точки зрения времени изготовления устройства и затрат.
Согласно предпочтительному варианту осуществления изобретения эти средства соединения состоят из вала 40 расцепления отключающего устройства прерывателя 1 цепи. Точнее говоря, стороны поддерживающей рамки 31 шарнирно соединены с валом 14 расцепления. Вследствие этого, блок, состоящий из вала 40 расцепления и механизма 30 управления, может быть одновременно собран внутри устройства 1 прерывания цепи, поскольку установка в определенное местоположение устройства 1 определит установку в определенное местоположение блока. Упомянутый блок может быть собран на отличной линии от линии устройства 1 прерывания цепи перед последующей сборкой последнего.
Использование вала 40 расцепления в качестве средства соединения между сторонами является в особенности преимущественным, поскольку структура элемента, традиционно предназначенного для того, чтобы служить определенной цели (а именно, расцепления кинематической цепи), используется для того, чтобы служить для дополнительного конструктивного назначения рамки 31.
Фиг. 1 изображает общий вид первого варианта осуществления устройства прерывания цепи согласно настоящему изобретению. Более точно, устройство 1 прерывания цепи, показанное на чертеже, является автоматическим прерывателем цепи, к которому в дальнейшем будет осуществляться ссылка исключительно в целях описания. Однако это осуществляется при понимании того, что технические решения и принципы, разъясненные ниже, также являются применимыми для других типов устройства прерывания цепи. Прерыватель 1 цепи на фиг. 1 содержит внешний корпус 2, состоящий из короба 2А и крышки 2B, которые соединены вместе съемным средством 76 соединения, таким как болты. Короб 2А сконфигурирован с возможностью вмещать в себя множество первых электрических зажимов 100, причем каждый относится к одному полюсу прерывателя 1 цепи. Каждый электрический зажим 100 электрически соединен с неподвижным контактом 10 на соответствующем полюсе. Крышка 2B также сконфигурирована с возможностью вмещать в себя вторые электрические зажимы (не показаны на фиг.), каждый из которых соответствует полюсу прерывателя 1 цепи и электрически соединен с подвижным контактом 20.
Фиг. 2 - покомпонентное изображение, относящееся к прерывателю 1 цепи фиг. 1 с удаленной крышкой 2B, показывающее блок, состоящий из вала 40 расцепления и механизма 30 управления, отделенного от остальной части прерывателя 1 цепи. Как показано, короб 2А предпочтительно поддерживает подвижную часть 50, которая служит для вмещения в себя подвижных контактов 20 прерывателя 1 цепи. Более точно, подвижная часть 50 содержит тело определенной формы, которое для каждого полюса в прерывателе 1 цепи содержит посадочное место для подвижного контакта 20.
Короб 2А вмещает в себя устройство защиты, которое для каждого полюса содержит блок 16 защиты, который взаимодействует с рабочим участком 144 вала 40 расцепления. Более точно, блоки 16 защиты взаимодействуют с валом 40 расцепления, отслеживая возникновение аварийного режима, такого как, короткое замыкание на линии, где установлен прерыватель цепи. Согласно известным вариантам осуществления блоки 16 защиты могут быть теплового, магнитного, термомагнитного или электронного типа или их сочетание.
Фиг. 3 - общий вид сборки, состоящей из механизма 30 управления и вала 40 расцепления. Механизм 30 управления оперативно соединен с подвижными контактами 20 при помощи подвижной части 50. Более точно, механизм 30 управления может переходить в первую рабочую конфигурацию (в дальнейшем называемой замкнутой конфигурацией), в результате которой каждый подвижный контакт 20 соединяется с соответствующим неподвижным контактом 10. Механизм 30 управления может также переходить во вторую конфигурацию, определенную ручным действием, осуществленным на одном из элементов в кинематической цепи (в конфигурацию ручного размыкания) в результате которой каждый подвижный контакт 20 отделяется от соответствующего неподвижного контакта 10. Механизм 30 управления может также переходить в третью конфигурацию, определенную отключающим устройством, что имеет место в результате действия одного из блоков 16 защиты на одном из рабочих участков 144 вала 40 расцепления. Упомянутое действие вовлекает во вращение вал 40 расцепления, что определяет перемещение расцепляющего элемента 36 (см. фиг. 7) в механизме 30 управления. Движение расцепляющего элемента 36 вызывает 'расцепление' кинематической цепи, в результате чего механизм 30 управления переключается из 'замкнутой' конфигурации в 'расцепленную' конфигурацию.
Снова ссылаясь на фиг. 3, кинематическая цепь механизма 30 управления содержит, по меньшей мере, один рабочий элемент шарнирно соединенный с поддерживающей рамкой 31 при помощи средства соединения в форме штыря. Рабочий элемент содержит пару противолежащих боковых участков, которые соединены поперечным соединительным участком. Средство соединения в форме штыря содержит пару концов в форме штыря, каждый из которых выступает с одной стороны бокового участка рабочего элемента или поддерживающей рамки 31. Средство соединения в форме штыря также содержит пару посадочных мест, каждое из которых определено в поддерживающей рамке в рабочем элементе для вмещения в себя соответствующего конца в форме штыря. Как только концы в форме штыря вставляются в посадочные места, конфигурируется ось совместного вращения между поддерживающей рамкой 31 и упомянутым рабочим элементом, соединенным с ней. Концы в форме штыря предпочтительно имеют только одну степень свободы для вращения по отношению к соответствующему посадочному месту во время работы механизма управления.
Фиг. 4 изображает вид поперечного сечения, показывающий для простоты поддерживающую рамку 31 механизма 30 управления и вал 40 расцепления. Стороны 134 рамки 31, каждая содержит оконечный участок 134B, из которого выступает участок 51 в форме штыря. Каждый оконечный участок 134B вставляется в соответствующую полость 52 определенной формы, по меньшей мере, один углубленный участок 53 которой имеет поверхности, геометрически сопряженные с участками 51 в форме штыря поддерживающей рамки 31 с тем, чтобы обеспечить возможность соответственного перемещения вала 40 расцепления по отношению к сторонам 134 рамки 31. Более точно, углубленный участок 53 определен с тем, чтобы быть соосным с осью 200 вращения вала 40 расцепления.
Фиг. 5 изображает вид сбоку компонентов фиг. 4, показывающий конфигурацию сторон 134 поддерживающей рамки 31. В частности, фигура показывает посадочные места 61, 65 в которые вставляются концы 71, 75 в форме штыря элементов 32, 36 (описанные более подробно ниже) механизма 30 управления, непосредственно поддерживаемые двумя сторонами 134. Фиг. 5 также показывает рабочее положение вала 40 расцепления, обращенного к поперечному соединительному участку 21. Продольное удлинение вала 40 расцепления, проходящего между двумя углублениями определенной формы, явно определяет вышеописанный дополнительный соединительный участок между сторонами 134 рамки. Как объяснено выше, это решение преимущественно обеспечивает возможность увеличения единой жесткости рамки 31 с очевидными преимуществами с точки зрения надежности изобретения.
Фиг. 6 изображает вид вдоль VI-VI на фиг. 5, который показывает вид поперечного сечения участка вала 40 расцепления, содержащего в себе полости 52, в которые вставляются концы 51 в форме штыря сторон 134 поддерживающей рамки 31. Очевидно, каждая полость 52 определяет опорную поверхность 66 для одной из сторон 134 рамки 31, эффективно предотвращая любые осевые движения сторон.
Механизм 30 управления содержит главный крюк 32, который оперативно соединен с поддерживающей рамкой 31 при помощи первого средства соединения в форме штыря. Структура главного крюка 32 образована второй парой боковых участков 42, соединенных вместе вторым поперечным соединительным участком 22. Главный крюк 32 соединен с поддерживающей рамкой 31 при помощи первого средства в форме штыря согласно изобретению, который определяет первую ось взаимного вращения 101. Более точно, поддерживающая рамка 31 занимает фиксированное положение во время работы механизма 30 управления. В результате главный крюк 32 вращается относительно поддерживающей рамки 31 вокруг определенной выше первой оси взаимного вращения 101.
Первое средство соединения в форме штыря содержит первую пару концов 71 в форме штыря (в дальнейшем также указываемых выражением 'первые концы 71 в форме штыря'), которые каждый выступают из одного из боковых участков 42 главного крюка 32. Более точно первые концы 71 в форме штыря выполнены целиком с соответствующими боковыми участками 42, выступая на внешней стороне внешнего участка. Первое средство соединения в форме штыря также содержит первую пару посадочных мест 61 (в дальнейшем также указываемых выражением 'первые посадочные места 61'), в каждое из которых вставляется один из первых концов 71 в форме штыря главного крюка 32. В частности, как показано на фиг. 7, первые посадочные места 61 сконфигурированы по существу U-образной формы с тем, чтобы обеспечить возможность вставки первых концов 71 в форме штыря в точно определенном направлении.
Первые посадочные места 61 определены в положении в окрестности первого поперечного участка 21 поддерживающей рамки 31, в то время как первые концы 71 в форме штыря находятся в положении по существу удаленном от второго поперечного участка 22 главного крюка 32. Первый поперечный участок 21, таким образом, располагается напротив второго поперечного участка 22 главного крюка 22, как только два элемента соединяются. Более того, боковые участки 42 главного крюка 32 проходят так, чтобы занимать положение между боковыми участками 42 поддерживающей рамки 31 так, что главный крюк 32 может вращаться относительно рамки 31 в пределах упомянутой рамки.
Механизм 30 управления, показанный на чертежах, содержит третий элемент 33, в дальнейшем указываемый термином 'вилка 33'. Структура вилки 33 содержит третью пару противолежащих боковых участков 43, которые соединены вместе при помощи третьего соединительного участка 23. Вилка 33 оперативно соединена с главным крюком 32 при помощи второго средства соединения в форме штыря, который конфигурирует вторую ось 102 взаимного вращения (см. фиг. 8 и 9), по существу параллельно первой оси 101 вращения. Второе средство соединения в форме штыря содержит вторую пару концов 72 в форме штыря (в дальнейшем указываемых термином 'вторые концы 72 в форме штыря') и вторую пару посадочных мест 62 (в дальнейшем указываемых выражением 'вторые посадочные места 62'), каждое из которых подходит для того, чтобы содержать в себе одни из вторых концов 72 в форме штыря. Последние выполняются за одно целое с главным крюком 32. Вторые концы 72 в форме штыря, обращенные друг к другу, выступают от каждой из внутренних сторон боковых участков 42 главного крюка 32, между тем как вторые посадочные места 62 определены боковыми участками 43 вилки 33. Более точно, вторые посадочные места 62 имеют по существу C-образную конфигурацию и расположены в линию с первыми противолежащими концевыми частями 43А боковых участков 43.
Вилка 33 соединена с четвертым операционным элементом 34 в механизме 30 управления, в дальнейшем указываемым термином 'стержень 34 управления', который содержит четвертую пару боковых участков 44, соединенных четвертым поперечным участком 24. Стержень 34 управления оперативно соединен с вилкой 33 при помощи средства соединения в форме штыря, который конфигурирует третью ось кругового вращения 103 (см. фиг. 8 и 9), по существу параллельно вышеописанной первой и второй осям 101, 102. Более точно, третье средство соединения в форме штыря содержит третью пару концов 73 в форме штыря (в дальнейшем указываемых используя выражение 'третьи 73 концы в форме штыря') и третью пару посадочных мест 63 (в дальнейшем указываемых выражением 'третьи посадочные места 63 в форме штыря'), каждое из которых подходит для вмещения в себя одного из третьих концов 73 в форме штыря. Последние выполнены целиком со стержнем 34 управления, и они выступают на противолежащих сторонах четвертого поперечного участка 24. Третьи посадочные места 63 сконфигурированы по существу в С-образной форме и каждый определен на одном из боковых участков 43 вилки 33. Более точно, третьи посадочные места 63 определены по линии со вторыми противолежащими концевыми частями 43B боковых участков 43. Вторые противолежащие концевые части 43B по существу противоположны первым концевым частям 43A, в линию с которыми находятся вторые посадочные места 62 для второго средства соединения в форме штыря.
Стержень 34 управления также содержит вторую пару соединительных концов 82, выполненных за одно целое с четвертыми боковыми участками 44 с тем, чтобы занимать взаимно противоположные положения. Каждый из этих вторых соединительных концов 82 выступает от внутренней стороны боковых участков так, что он может быть вставлен в соответствующие центрирующие посадочные места (не показаны), определенные на теле подвижной части. Более точно, как только вторые соединительные концы 82 вставляются в соответствующие центрирующие посадочные места, они определяют ось взаимного вращения для стержня 34 управления в отношении подвижной части 50 и наоборот. Упомянутая ось находится в смещенном от центра положении, относительно оси вращения подвижной части 50. Как результат, перемещение стержня 34 управления определяет вращение подвижной части 50 и, следовательно, подвижных контактов 20, содержащихся в ней.
Механизм 30 управления содержит пятый рабочий элемент 35, в дальнейшем указываемый термином 'элемент 35 держателя рычага', который содержит пятую пару боковых участков 45, соединенных пятым поперечным участком 25, который, по меньшей мере, частично U-образно изогнут. Упомянутый изгиб имеет своей целью поддержание рычага 35В, который проходит от корпуса 2 прерывателя 1 цепи, как только он был собран. На практике, рычаг 35В служит в качестве интерфейса между прерывателем 1 цепи и оператором. Как более детально объяснено далее, рычаг 35В занимает конкретное положение в зависимости от рабочей конфигурации механизма 30 управления (т.е. от замкнутой, разомкнутой или расцепленной конфигурации). Как результат, оператор может установить рабочий статус прерывателя 1 цепи, отследив положение рычага 35В.
Элемент 35 держателя рычага оперативно соединяется с поддерживающей рамкой 31 при помощи четвертого средства соединения, содержащего четвертую пару концов 74 в форме штыря (в дальнейшем указываемых термином 'четвертые концы 74 в форме штыря'), которые выполнены за одно целое с поддерживающей рамкой 31. Четвертое средство соединения также содержит четвертую пару посадочных мест 64 (в дальнейшем также указываемую выражением 'четвертые посадочные места 64'), каждое из которых определено на одном из пятых продольных участков 45 рычага 35. Как только четвертые концы 74 вставляются в соответствующие четвертые посадочные места 64, они определяют четвертую неподвижную ось 104 вращения (см. фиг. 12), параллельную осям вращения, описанным ранее. Каждый из четвертых концов 74 в форме штыря выступает от соответствующей внешней стороны 134 поддерживающей рамки 31 и закрепляется в соответствующем четвертом посадочном месте 64, сконфигурированном по существу С-образной формы.
Как уже упоминалось выше, механизм 30 управления содержит расцепляющий элемент 36, оперативно соединенный с поддерживающей рамкой 31 при помощи пятого средства соединения в форме штыря. Более точно, расцепляющий элемент 36 структурно состоит из шестой пары лицевых боковых соединительных участков 46, которые соединены пятым поперечным участком 26. Последний содержит первый крючкообразный конец 85, который служит для цели перехвата второго крючкообразного конца (не показан) главного крюка 32.
Пятое средство соединения в форме штыря содержит пятую пару концов 75 в форме штыря, выполненных за одно целое с шестыми боковыми участками 56 расцепляющего элемента 36. Более точно, каждый из этих пятых концов 75 в форме штыря выступает от внешней стороны одного из боковых участков 46. Пятое средство соединения также содержит противолежащую пятую пару посадочных мест 65, каждое на одной стороне 134 поддерживающей рамки. Каждый из пятых концов 75 в форме штыря вставляется в соответствующее пятое посадочное место 65 с тем, чтобы сконфигурировать пятую неподвижную ось 105 вращения (см. фиг. 12) для вращения расцепляющего элемента 36.
Ссылаясь на общий вид фиг. 11, по меньшей мере, один из боковых участков 46 расцепляющего элемента 36 содержит первый активирующий конец 91, который оперативно соединен со вторым активирующим концом 92, выступающим от вала 40 расцепления. Любое вращение вала 40 расцепления, следующее расцеплению устройства защиты, таким образом, преобразуется в перемещение первого конца 92, что снимает опору для элемента 85, вызывая вращение расцепляющего элемента 36 вокруг пятой оси 105 вращения. Расцепляющий элемент 36 может, следовательно, проходить от положения зацепления к положению высвобождения, в котором главный крюк 32 становится свободным для вращения вокруг первой оси 101 вращения. Два активирующих конца 91, 92 взаимно соединяются возвратной пружиной 87, которая обеспечивает возможность устройству вернуться из расцепляющего положения в разомкнутое положение.
Механизм 30 управления содержит, по меньшей мере, одну управляющую пружину 37, а предпочтительно две. Каждая управляющая пружина 37 оперативно соединена с одним концом четвертого поперечного участка 24 стержня 34 управления и с другим концом пятого поперечного участка 25 элемента 35 держателя рычага при помощи подходящих крюков 37B. Внутри механизма 30 управления каждая управляющая пружина 37 служит больше чем для одной цели. Ее первая цель состоит в том, чтобы предоставить механизм с силой упругости, требуемый для ускорения вращения подвижной части 50, т.е. размыкания или замыкания контакта, при помощи стержня 34 управления. Каждая управляющая пружина 37 также служит для цели оказания воздействия силой упругости на концы 71, 72, 73, 74, 75 в форме штыря соединенных элементов так, что они могут поддерживать устойчивое положение внутри соответствующих посадочных мест 61, 62, 63, 64, 65 в которые они вставлены. Другими словами, каждая управляющая пружина 37 оказывает действие на различные элементы механизма 30 управления с тем, чтобы сохранять каждый элемент в постоянном соединении с другими. На практике каждая управляющая пружина 37 оказывает силу на различные концы 71, 72, 73, 74, 75 в форме штыря, которые сориентированы в направлении, согласованном с направлением, в котором они вставлены в соответствующие посадочные места 61, 62, 63, 64, 65. Более того, каждая управляющая пружина 37 оказывает усилие на различные концы 71, 72, 73, 74, 75 в форме штыря вне зависимости от конфигурации механизма 30 управления так, что постоянно обеспечивается функциональность устройства. Дополнительная функция пружин 37 состоит в обеспечении подходящего давления на электрические контакты, когда прерыватель цепи находится в замкнутой конфигурации.
Этот вариант осуществления является в особенности преимущественным в том, что он использует действие кинематических распорных элементов (т.е. управляющих пружин 37) для того, чтобы сохранить механизм 30 управления в жесткой сборке. Это делает возможным расширить диапазон допусков размеров для концов в форме штыря и относящихся посадочных мест с очевидными преимуществами с точки зрения общих затрат на изготовление.
Фиг. 8 изображает вид поперечного сечения механизма 30 управления, показанного в замкнутой конфигурации, в котором подвижные контакты 20 соединяются с соответствующими неподвижными контактами 10. В этой конфигурации, управляющие пружины 37 находятся под силой натяжения и испытывают силу упругости, которая действует вдоль линии 7. На практике, линия 7 определена точками, где управляющая пружина 37 входит в зацепление соответственно со стержнем 34 управления и элементом 35 держателя рычага. Расцепляющий элемент 36 механизма управления, таким образом, входит в зацепленное положение, удерживая главный крюк 32, т.е. предотвращая его от вращения вокруг первой оси 101.
Прохождение из замкнутой конфигурации фиг. 8 в разомкнутую конфигурацию (показанную на фиг. 9) происходит в результате ручного действия (указанного стрелкой F на фиг. 8), вызванного воздействием оператора на рычаг 36. Это ручное действие F вызывает вращение элемента 35 держателя рычага вокруг четвертой оси 104 взаимного вращения (см. фиг. 12). Во время первой фазы вращения элемента 35 держателя рычага подвижные контакты 20 остаются соединенными, между тем как управляющие пружины 37, соединенные между элементом 35 держателя рычага и стержнем 35 управления подпадают под действие прогрессирующе увеличивающейся нагрузки на растяжение. Это продолжается вплоть до того, как линия 7 пересечет вторую ось 102 взаимного вращения, образованную вторым средством в форме штыря, которое соединяет главный крюк 32 с вилкой 33. Когда это происходит, управляющие пружины 37 достигают их максимального растяжения, т.е. их максимальной допустимой нагрузки на растяжение. Как только линия 7 опускается ниже второй оси 102 вращения, управляющие пружины 37 высвобождают энергию упругой деформации, накопленную во время первой фазы размыкания. Это обуславливает быстрое увлечение стержня 34 вниз, т.е. в направлении крюка 36, что вызывает вращение подвижной части 50 вокруг ее оси вращения, и это преобразуется в быстрое отделение контактов 10, 20. В конце фазы размыкания, механизм 30 управления приобретает конфигурацию, показанную на фиг. 9. Очевидно, расцепляющий элемент 36 остается в его зацепленном положении во время ручной операции размыкания.
Фиг. 10 показывает механизм 30 управления в его 'расцепленной' конфигурации. Прохождение от замкнутой конфигурации (на фиг. 7) в его расцепленную конфигурацию имеет место по причине действия устройства защиты в прерывателе 1 цепи, которое побуждает вращение вала 40 расцепления. Упомянутое вращение преобразуется во вращение расцепляющего элемента 36 вокруг пятой оси 105 вращения, что приводит его в положение высвобождения, в результате чего главный крюк 32 становится свободным для вращения относительно поддерживающей рамки 31 вокруг первой оси 101 взаимного вращения. Более точно, когда главный крюк 32 высвобождается, управляющие пружины 37 вызывают воздействие нагрузки на растяжение на стержень 34 управления при направлении рычага 35B. Упомянутая нагрузка на растяжение приводит к воздействию на главный крюк 32 посредством вилки 33, вызывая вращение крюка 32 вокруг оси 101 вращения. Захват стержня 34 управления в свою очередь побуждает вращение подвижной части 50 и, как следствие, быстрое отделение контактов 10, 20. Механизм 30 управления, таким образом, переходит в режим конфигурации, показанный на фиг. 10, который явно отличается от режима конфигурации на фиг. 9, которая показывает конфигурацию ручного размыкания.
Согласно предпочтительному варианту осуществления поддерживающая рамка 31, показанная на фиг. с 1 по 12, выполнена из металлического материала, как, например, листового металла. Более точно, стороны 134 рамки 31 выполнены за единое целое с поперечным соединительным участком 21.
Фиг. 13-29 относятся к второму варианту осуществления устройства прерывания цепи согласно изобретению. В частности, они также относятся к автоматическому прерывателю 3 цепи предпочтительно для использования для более низких токов, чем в случае прерывателя 1 цепи, показанного на фиг. 1-6.
Ссылаясь на фиг. 13 и 14 структура корпуса прерывателя 3 цепи по существу подобна той, которая описана для прерывателя 1 цепи, и укомплектована коробом 2А и соответствующей крышкой 2В и защитной передней пластиной 2С. Фиг. 13 показывает автоматический прерыватель 3 цепи готовый к установке, т.е. после завершения сборки, между тем как фиг. 14 показывает тот же прерыватель 3 цепи со снятой с крышки 2В защитной передней пластиной 2С.
Фиг. 15 изображает первый покомпонентный вид прерывателя 3 цепи на фиг. 13, показывающий прерыватель без защитной передней пластины 2С. Более точно, фиг. 15 показывает детали крышки 2В прерывателя 3 цепи, на которых определена поддерживающая структура 81, которая служит цели поддержания механизма 30 управления. Структура содержит пару поддерживающих стенок 131, которые в целом обращены и геометрически сопряжены со сторонами 134 поддерживающей рамки 31 механизма 30 управления для того, чтобы сохранять последний в правильном положении во время обычной работы прерывателя цепи. Снова ссылаясь на фиг. 15, между боковыми поддерживающими стенками 31 существует отверстие 82, через которое выступает рычаг 35B управления механизма 30 управления, как только автоматический прерыватель 3 цепи собран.
Фиг. 16 изображает второй покомпонентный вид прерывателя 3 цепи, показывающий блок, содержащий механизм 30 управления и вал 40 расцепления, отделенные от оставшейся части прерывателя 3 цепи. Как показано во втором варианте осуществления, формы вала 40 расцепления и механизма 30 управления отличаются от форм подобных элементов на фиг. 1-12. Как объяснено более подробно позднее, поддерживающая рамка 31 и вал 40 расцепления соединены иначе, т.е. при помощи по существу соединения 'запертого' типа. Это соединение по существу включает вставку пары участков 121 определенной формы вала 40 расцепления внутрь подходящих соединительных посадочных мест 122, каждое определенное на оконечном участке одной стороны 134А, 134С рамки 31.
Как показано на фиг. 19 и 21, каждое из посадочных мест 122 содержит сужающийся участок 123, который проходит от края 140 соответствующей стороны 134 рамки 31. Более точно, участок 123 сужается по направлению к внутренней части стороны 134. Посадочное место 122 также содержит круговой участок 141, который проходит от наиболее удаленной секции сужающегося участка 123. Круговой участок 141 имеет диаметр D1, который больше чем размер S наиболее удаленного поперечного сечения сужающейся части 123.
Фиг. 20 и 21 показывают структуру участков 121 определенной формы, предназначенных для помещения в соединительное посадочное место 122. Каждый участок 121 определенной формы содержит удлинение в осевом сечении, идентифицированное как L1, на котором определены две плоские поверхности 125 в положении, обращенном к оси вращения вала 40. Как показано на фиг. 20, расстояние H между двумя плоскими поверхностями меньше, чем диаметр цилиндрического удлинения L1. Упомянутый диаметр выбирается так, чтобы он предпочтительно совпадал с диаметром D1 кругового участка 141 соединительного посадочного места 122, между тем как расстояние H1 между плоскими поверхностями 125 является более узким, чем размер S, относящийся к наиболее удаленному поперечному сечению суженного участка 123.
Участки 121 определенной формы вставляются в соответствующие соединительные посадочные места 122, сохраняя вал ориентированным так, что участки определенной формы, каждый направлен к поверхности 145 сужающегося участка 123. Как только участки 121 определенной формы достигли кругового участка 141, вал поворачивается приблизительно на 90° вокруг своей оси 200 вращения. При таком условии участки 121 определенной формы остаются в зацепленном состоянии внутри круговых участков 141, а вал 40 расцепления сохраняет возможность вращения, поддерживаясь при вращении поверхностями кругового участка 141.
Ссылаясь снова на фиг. 20 вал 40 расцепления содержит опорное кольцо 161, которое выступает в положении, примыкающем к соответствующему участку 121 определенной формы. Опорное кольцо 161 определяет опорную поверхность 166 для участка стороны 134 рамки 31, которая окружает соответствующее соединительное посадочное место 122. Этот вариант осуществления преимущественно увеличивает жесткость структуры поддерживающей рамки 31, так как он препятствует любому боковому прогибу сторон 134А, 134С. Описанные выше технические решения могут быть также заменены другими, функционально эквивалентными решениями, которые, следовательно, будут подразумеваться как часть настоящего изобретения.
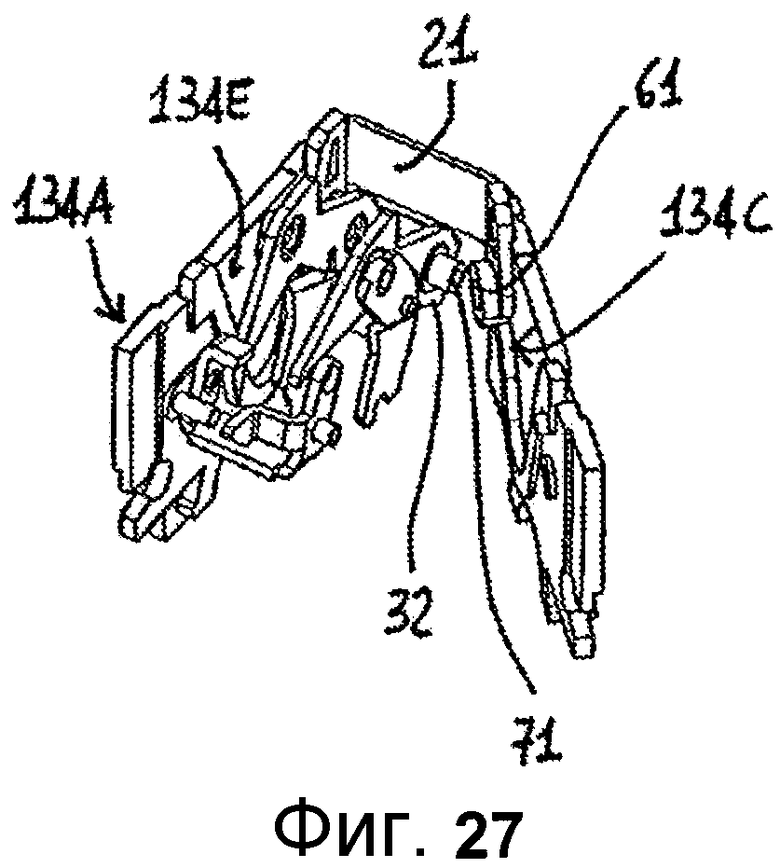
Фиг. 22 является покомпонентным изображением, показывающим механизм управления, проиллюстрированный на фиг. 13-16. Кинетическая цепь, содержащая механизм, по существу эквивалентна той, которая описана в деталях для варианта осуществления, проиллюстрированного на фиг. 1-12. Следует отметить, в особенности, что элементы, содержащие кинематическую цепь, являются взаимно соединенными средством соединения в форме штыря подобным образом, как объяснено выше. Как в предыдущем решении, главный крюк 32 с расцепляющим элементом 36 шарнирно соединен с поддерживающей рамкой 31. Стороны крюка 32 расцепляющего элемента 36 содержат концы 71, 75 в форме штыря для вставки в соответствующие посадочные места 61, 65, каждое из которых определено на внутренней стороне 134Е одной из сторон 134А, 134С рамки 31.
Фиг. 23 и 24 являются двумя проекциями поддерживающей рамки 31, которая предпочтительно изготовлена литьем под давлением пластикового материала. Более точно, стороны 134А, 134С рамки 31 вылиты за одно целое с поперечным соединительным участком 21. Это решение является чрезвычайно преимущественным в том отношении, что оно дает возможность поддерживающей рамке 31 быть образованной на одном технологическом этапе, т.е. только в одном процессе. В действительности, такое литье под давлением также обеспечивает возможность определения посадочных мест 61, 65 для вмещения в себя концов 71, 75 в форме штыря главного крюка 32 и расцепляющего элемента 36 в механизме управления 30, а также соединительного посадочного места 122 для вмещения в себя участков 121 определенной формы вала 40 расцепления. С практической точки зрения литье под давлением также делает возможным определение новых форм соединения между сторонами 134А, 134С рамки 31 и элементами в кинематической цепи. В проиллюстрированном варианте осуществления, например, внутренние части 134Е сторон 134А, 134С содержат оребрение 145 определенной формы (см. фиг. 22), которое образует посадочное место 146 для вращения конца 35С в форме штыря элемента 35 держателя рычага. Само собой разумеющееся, что среди других преимуществ, это решение особенно упрощает конструкцию и изготовление элемента 35 держателя рычага.
Ссылаясь, в частности, на детализированный вид фиг. 29, рамка 31 вылита под давлением из пластикового материала с тем, чтобы создавать 'сжимаемые зоны' 155, проходящие между каждой стороной 134А, 134С рамки 31 и соединительным участком 21, который обеспечивает поперечное соединение между двумя сторонами 134А, 134С. Термин 'сжимаемая зона' используется здесь как означающий локальное уменьшение толщины материала с тем, чтобы обеспечить возможность одной стороне 134 быть согнутой в отношении поперечного соединительного участка 21 или наоборот. Другими словами, сжимаемая область 155 служит как структурный шарнир, позволяющий рамке 31 быть согнутой после литья под давлением, как показано на фиг. 23 и 24, для образования формы операционного состояния, как показано, например, на фиг. 17 и 19. Сжимаемые области 155 естественным образом предназначены для того, чтобы обеспечивать надежное механическое сопротивление, достаточное для того, чтобы противостоять любому давлению, направленному на разделение сторон 134А, 134С рамки 31.
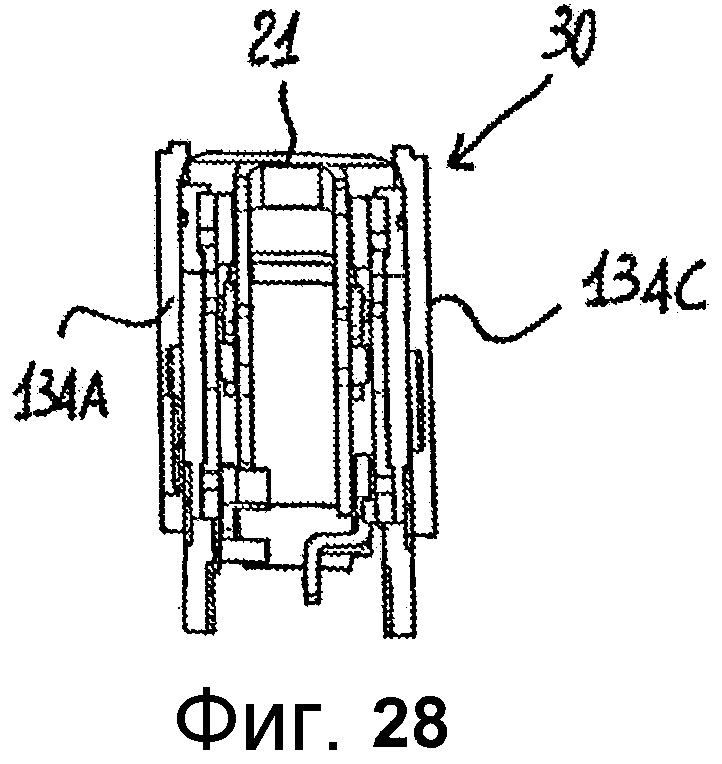
Фиг. 27 и 28 показывают механизм 30 управления соответственно во время его сборки и после завершения сборки. Очевидно, литье под давлением поддерживающей рамки 31 как одного целого упрощает процедуру сборки блока, содержащего механизм 30 управления и вал 40 расцепления. Ссылаясь, в частности, на фиг. 27, элементы, содержащие кинематическую цепь в механизме 30, могут быть установлены сначала на внутренней стороне 134E первой стороны 134А рамки 31. Таким образом, например, один из концов 71 в форме штыря главного крюка 32 может быть вставлен в одно из сформованных посадочных мест 61 на первой стороне 134А. Затем вторая сторона 134С может быть загнута в отношении первой 134А, благодаря сжимаемым зонам 155 с тем, чтобы тоже заблокировать элементы кинематической цепи на другой стороне. Как проиллюстрировано, другой конец 71 в форме штыря главного крюка 32 может быть вставлен в соответствующее посадочное место 61 с тем, чтобы устойчиво удерживать крюк на обеих сторонах а, следовательно, все элементы, присоединенные к нему. Как только получена конфигурация, показанная на фиг. 28, структура механизма 30 управления может быть скреплена соединительным валом 40 расцепления согласно объясненным выше принципам.
Технические решения, принятые для устройства прерывания цепи согласно изобретению, в полной мере разрешают ранее изложенную техническую задачу. В частности, внутренняя структура устройства является таковой, что она дает возможность заметного уменьшения времени сборки по сравнении с традиционными решениями. В то же время устройство прерывания цепи является надежным и простым для изготовления при весьма конкурентоспособных затратах.
Устройство прерывания цепи, сконструированное таким образом, может подвергаться многочисленным модификациям и вариантам, при этом они все попадают в пределы объема идеи изобретения. Более того, все детали могут быть заменены другими, которые являются техническими эквивалентами, и в практических терминах могут быть использованы любые материалы подходящей формы и размера, согласно потребностям и характеристикам области техники.
Устройство прерывания цепи согласно изобретению содержит внешний корпус (2), вмещающий в себя для каждого полюса, по меньшей мере, один неподвижный контакт (10) и, по меньшей мере, один подвижный контакт (20), пригодные для взаимного соединения и разъединения. Устройство также содержит механизм (30) управления, содержащий поддерживающую рамку (31), которая поддерживает кинематическую цепь, оперативно соединенную с подвижным контактом так, чтобы обеспечить возможность последнему быть соединенным или разъединенным от неподвижного контакта. Поддерживающая рамка содержит пару сторон (134), соединенных при помощи первого поперечного соединительного участка (21) и дополнительного средства соединения, которое определяет дополнительный поперечный соединительный участок в положении, отличном от положения первого поперечного соединительного участка. Технический результат - создание компактного и надежного устройства прерывания цепи, внутренняя структура которого дает возможность упрощения процедуры и времени сборки. 8 з.п. ф-лы, 29 ил. 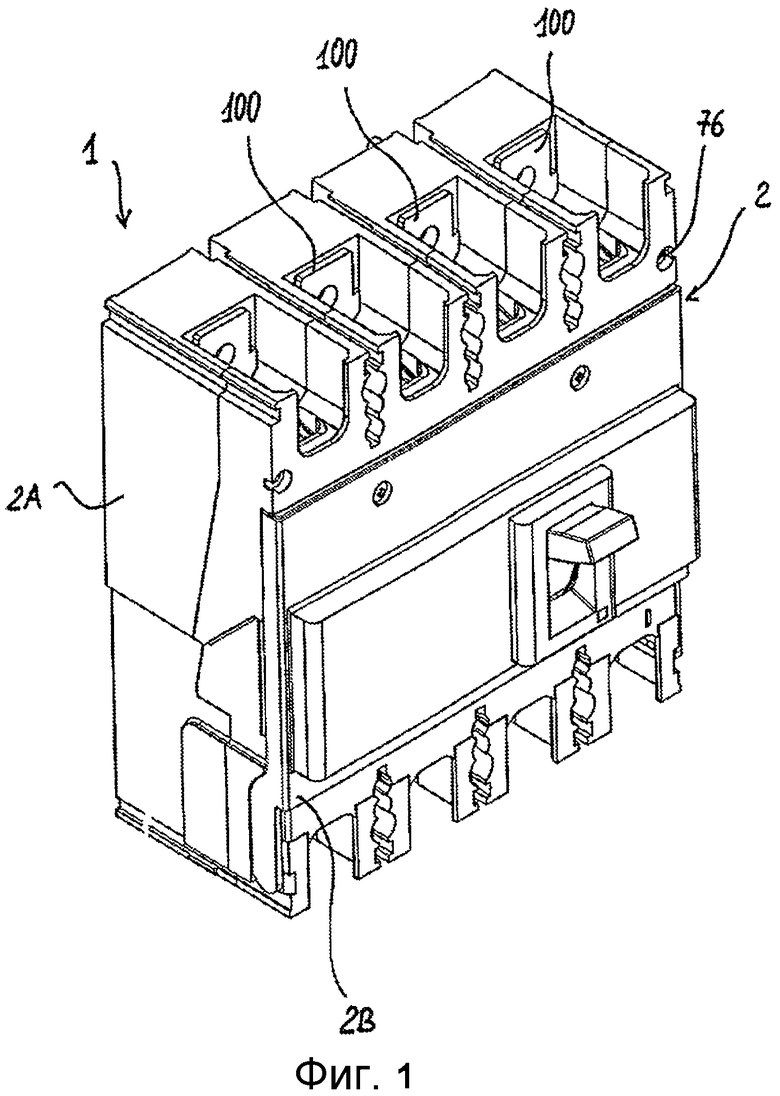
1. Однополюсное или многополюсное устройство (1, 3) прерывания цепи низкого напряжения, содержащее:
внешний корпус (2), вмещающий в себя, для каждого полюса, по меньшей мере, один неподвижный контакт (10) и один подвижный контакт (20), для взаимного соединения и разъединения;
механизм (30) управления, содержащий поддерживающую рамку (31), которая поддерживает кинематическую цепь, оперативно соединенную с подвижным контактом (20) так, чтобы обеспечить возможность последнему быть соединенным и разъединенным с неподвижным контактом (10);
вал (40) расцепления для активизирования кинематической цепи
отличающееся тем, что поддерживающая рамка (31) содержит пару противолежащих сторон (134), соединенных вместе при помощи первого поперечного соединительного участка (21) и дополнительного средства соединения, которое определяет дополнительный поперечный соединительный участок в положении, отличном от положения первого поперечного соединительного участка (21), причем дополнительное средство соединения состоит из вала (40) расцепления.
2. Устройство прерывания цепи (1, 3) по п.1, в котором первый поперечный соединительный участок (21) выполнен за одно целое со сторонами (134).
3. Устройство (1, 3) прерывания цепи по п.1, в котором средство соединения обеспечивает поперечное соединение между сторонами (134) так, что дополнительный поперечный соединительный участок занимает положение спереди первого поперечного соединительного участка (21).
4. Устройство (1, 3) прерывания цепи по п.1, в котором стороны (134) шарнирно соединены с валом (40) расцепления.
5. Устройство (1, 3) прерывания цепи по п.4, в котором стороны (134) шарнирно соединены с валом (40) расцепления при помощи пары противолежащих концов (51) в форме штыря, каждый из которых выступает от одной из сторон (134), причем каждый конец (51) в форме штыря вставлен в соответствующую полость (52) определенной формы, образованную на валу (40) расцепления, причем полость (52) определенной формы содержит, по меньшей мере, один углубленный участок (53), который имеет поверхности геометрически сопряженные с поверхностями концов (51) в форме штыря сторон (134) рамки (31).
6. Устройство (1) прерывания цепи по п.5, в котором углубленные участки (53) выполнены так, что концы (51) в форме штыря занимают коаксиальное положение с осью вращения вала (40) расцепления, причем углубленные участки (53), определяющие опорную поверхность (66) для соответствующей стороны (134) рамки (31).
7. Устройство (3) прерывания цепи по п.4, в котором вал (40) расцепления шарнирно соединен со сторонами (134А, 134С) поддерживающей рамки (31) при помощи «закрепленного шпонкой» соединения, причем закрепленного шпонкой соединения, состоящего из пары участков (121) определенной формы вала (40) расцепления, вставленных в подходящие посадочные места (122) соединения, определенные на конечных участках сторон (134А, 134С) рамки (31).
8. Устройство (3) прерывания цепи по п.1, в котором поддерживающая рамка (31) содержит сжатые области (155), проходящие между каждой стороной (134А, 134С) рамки (31) и первым поперечным соединительным участком (21).
9. Устройство (1) прерывания цепи по п.8, в котором поддерживающая рамка (31) выполнена из пластикового материала.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| DE 4442417 C1, 15.02.1996 | |||
| US 4622530 A,11.11.1986 | |||

