Изобретение относится к антенной технике, может использоваться в антенных установках наземных приемопередающих комплексов связи с низкоорбитальными космическими аппаратами и предназначено для управляемого вращения антенной по азимуту, углу места и углу наклона.
Известны антенные установки с угломестно-угломестным типом подвески (подвеска в осях X-Y) [1 - А.М. Покрас, В.М. Цирлин, Г.Н. Кудеяров. Системы наведения антенн земных станций спутниковой связи, М., "Связь", 1978, стр.77, рис.4.5], у которых первичная ось горизонтальна, а вторичная перпендикулярна ей в горизонтальной плоскости. Недостатком этого типа подвески является наличие «мертвой зоны» при сопровождении космического аппарата (КА) в направлениях, близких к первичной оси системы X-Y, т.е. при малых углах места. К недостаткам также можно отнести сложность конструктивного исполнения и балансировки для антенн с диаметром зеркала больше 3,5 м.
Известна также азимутально-угломестно-угломестная подвеска (подвеска в осях X-Y-Z) [1 - стр.75], у которой недостаток системы в осях X-Y по наличию «мертвой зоны» при малых углах места компенсируется наличием азимутального поворотного механизма, с помощью которого можно изменять направление первичной оси таким образом, чтобы восходящий и нисходящий участки видимой части траектории КА не попадали на «мертвые зоны». Недостатком такой подвески, кроме сложности конструктивного исполнения, присущего системе в осях X-Y в отношении балансировки, является дополнительное усложнение и удорожание конструкции в целом.
Известна также азимутально-угломестная подвеска с перекрестным угломестным движением (подвеска в осях X-Y-Z) [1 - стр.78, рис.4.7], которая позволяет путем наклона азимутальной оси в небольших пределах (как правило ±10 град.) исключить наличие «мертвой зоны» в области углов места, примыкающих к зениту. Недостатком такой подвески является узкая область применения антенн с данной подвеской (работа с КА, находящимися на низкой солнечно-синхронной орбите) и сложность позиционирования направления оси наклона с севера на юг.
Наиболее близким аналогом, взятым за прототип, являются полноповоротные антенны башенного типа с азимутально-угломестным ОПУ (подвеска в осях Z-X). К таким антеннам относится отечественная антенна ТНА-57, используемая в станциях системы спутниковой связи "Орбита" [1 - стр.87, рис.4.20]. Недостатком таких антенн является наличие «мертвой зоны» в области углов места, примыкающих к зениту, в пределах которой невозможно обеспечить связь с низкоорбитальными КА.
Технический результат состоит в объединении при помощи простого технического решения достоинств азимутально-угломестного и угломестно-угломестного опорно-поворотного устройства (ОПУ) в одной антенной установке.
Задачей изобретения является создание, с помощью легкореализуемого технического решения, трехосного ОПУ для антенной установки, свободной от вышеперечисленных недостатков.
Для реализации этой задачи предлагается опорно-поворотное устройство, содержащее азимутальный поворотный механизм, состоящий из колонны в виде стальной трубы с закрепленным на ней азимутальным силовым приводом, вокруг которого на подшипниках вращается азимутальная ферма, и угломестный поворотный механизм, состоящий из опоры угломестного редуктора и опоры угломестной платформы, смонтированных на азимутальной ферме, угломестного силового привода и угломестной поворотной платформы, состоящей из угломестной оси в виде стальной трубы и приваренной к ней первой стальной плиты, к которой пристыковывается антенное зеркало, и второй стальной плиты, приваренной с противоположной стороны к угломестной оси, к которой крепится противовес, при этом азимутальный и угломестный поворотные механизмы снабжены азимутальным и угломестным датчиками углового положения.
Согласно изобретению добавлены балка с двумя опорами вращения антенного зеркала, закрепленная на первой стальной плите, кронштейн крепления винтового домкрата, закрепленный на второй стальной плите, кронштейн крепления проушины домкрата, закрепленный на антенном зеркале, винтовой домкрат с приводом, датчик угла наклона. В результате решается проблема наличия «мертвых зон» в области углов места, примыкающих к зениту, и в области малых углов места за счет возможности работы трехосного ОПУ как в режиме Z-X (азимутально-угломестном), так и в режиме X-Y (угломестно-угломестном) с сохранением заданной точности наведения по угловым координатам при незначительном конструктивном усложнении ОПУ.
Сочетание отличительных признаков и свойств предлагаемого изобретения в доступной литературе не обнаружено, поэтому оно соответствует критерию новизны и изобретательского уровня.
На фиг.1 показана объемная модель трехосного опорно-поворотного устройства. На фиг.2 представлена схема в виде проекции видимой полусферы на горизонтальную плоскость, иллюстрирующая принцип действия опорно-поворотного устройства в режиме X-Y.
Трехосное опорно-поворотное устройство содержит азимутальный поворотный механизм, состоящий из стальной колонны 1 с закрепленным на ней азимутальным силовым приводом, в состав которого входит редуктор 2 и электродвигатель 3. На выходном валу редуктора 2 закреплен фланец 4, к которому жестко присоединена азимутальная ферма 5, способная вращаться вокруг первичной оси 6. На азимутальной ферме 5 смонтирован угломестный поворотный механизм, состоящий из силового привода, в состав которого входит угломестный редуктор 7, закрепленный на опоре 8, и электродвигатель 9. Угломестная ось 10 закреплена с одной стороны на выходном валу угломестного редуктора 7, а с другой стороны опирается на опору 11 и способна вращаться относительно вторичной оси 12, перпендикулярной первичной оси 6. К угломестной оси 10, выполненной в виде стальной трубы, приварены первая стальная плита 13, к которой крепится балка 14 с двумя опорами 15 вращения антенного зеркала 16 вокруг третьей оси 17, перпендикулярной вторичной оси 12, и вторая стальная плита 18, приваренная с противоположной стороны к угломестной оси 10, к которой крепится противовес 19 и кронштейн 20 крепления винтового домкрата 21, проушина 22 которого, с помощью кронштейна 23, прикреплена к антенному зеркалу 16. Винтовой домкрат 21 снабжен силовым приводом, состоящим из промежуточного редуктора 24 и электродвигателя 25. Азимутальный привод, угломестный привод и привод угла наклона снабжены датчиком углового положения азимута (находится внутри колонны 1, на Фиг.1 не показан), датчиком угла места 26 и датчиком угла наклона 27, соответственно. Поскольку ось винтового домкрата 21 пересекает угломестную ось 10, в последнюю вварена стальная труба 28 для размещения винтового домкрата 21 и укрепления угломестной оси 10.
Трехосное опорно-поворотное устройство работает следующим образом: производится предварительный расчет видимых участков траектории требуемого КА, за которым будет производиться слежение. При максимальном угле места текущей траектории, не превышающем 80 град., слежение за КА осуществляется в режиме азимутально-угломестного ОПУ. Для этого, подавая питание на электродвигатель 9, посредством угломестного редуктора 7, поворачивают угломестную ось 10 таким образом, чтобы угол между оптической осью антенного зеркала 16 и горизонтом стал равен 0 град., далее, подавая питание на электродвигатель 3, посредством редуктора 2, поворачивают фланец 4 с присоединенной азимутальной фермой 5 в азимутальной плоскости таким образом, чтобы азимутальный угол между направлением на север и оптической осью антенного зеркала 16 стал равен азимутальному углу появления КА над горизонтом. При этом угол наклона антенного зеркала 16 относительно третьей оси 17, имеющий пределы изменения ±10 град., должен быть равен 0 град. Слежение за КА происходит известным способом изменением направления оптической оси антенного зеркала 16 по азимуту и углу места с привязкой ко времени в соответствии с расчетными данными. Контроль углового положения антенного зеркала 16 осуществляется с помощью датчика углового положения азимута (условно не показан), датчика угла места 26 и датчика угла наклона 27. Пределы перемещения оптической оси антенного зеркала 16 в режиме азимутально-угломестного ОПУ должны быть: по азимуту - ±270 град., по углу места - 0…90 град., по углу наклона - 0 град. При максимальном угле места текущей траектории, равном или превышающем 80 град., слежение за КА осуществляется в режиме угломестно-угломестного ОПУ. Для этого, подавая питание на электродвигатель 9, посредством редуктора 7, устанавливают угол места равным 0 град., далее, подавая питание на электродвигатель 3, поворачивают азимутальную ферму 5 таким образом, чтобы оптическая ось антенны в азимутальной плоскости (прямая А-В на фиг.2) была параллельна касательной (прямая D-E на фиг.2) к дуге С-D-F текущей траектории КА в апогейной точке D. Подавая питание на электродвигатель 25, приводящий в движение, с помощью промежуточного редуктора 24, винтовой домкрат 21 перемещают антенное зеркало 16 вокруг третьей оси 17 в направление на начало восходящего участка траектории КА (точка В на фиг.2). При слежении за КА угол места изменяется от 0 град. до 180 град., при этом угол наклона изменяется в пределах ±10 град. Вычисление значений углового положения антенного зеркала 16 относительно вторичной оси 12 и третьей оси 17 для угломестно-угломестного режима ОПУ производят с помощью известных тригонометрических преобразований из значений углового положения антенного зеркала 16 для азимутально-угломестного режима ОПУ.
Таким образом, введение в конструкцию азимутально-угломестного ОПУ третьей оси 17 вращения, перпендикулярной первичной 6 и вторичной 12 осям, с приводом от винтового домкрата 21 позволяет устранить основной недостаток этого типа ОПУ - наличие «мертвой зоны» в области углов места, примыкающих к зениту, сохранив при этом возможность уравновешивания массы антенного зеркала при помощи противовесов, что, в свою очередь, позволяет создавать наземные антенные установки с диаметром зеркала до 17 м для связи с низкоорбитальными космическими аппаратами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбалансированное опорно-поворотное устройство | 2023 |
|
RU2814798C1 |
| Уравновешенное опорно-поворотное устройство | 2021 |
|
RU2773815C1 |
| КРУПНОГАБАРИТНАЯ ПЕРЕВОЗИМАЯ АНТЕННА | 1996 |
|
RU2169969C2 |
| МОБИЛЬНЫЙ ОПТИЧЕСКИЙ ТЕЛЕСКОП | 2014 |
|
RU2565355C1 |
| АЗИМУТАЛЬНО-УГЛОМЕСТНАЯ АНТЕННАЯ УСТАНОВКА С ЧЕТЫРЕХЗЕРКАЛЬНЫМ ЛУЧЕВОДОМ | 1990 |
|
RU2019003C1 |
| УСТРОЙСТВО ОТСЧЕТА УГЛОВОГО ПОЛОЖЕНИЯ РАДИООСИ ПОЛНОПОВОРОТНЫХ ПАРАБОЛИЧЕСКИХ РАДИОТЕЛЕСКОПОВ | 1973 |
|
SU398994A1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2012 |
|
RU2482578C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО | 2008 |
|
RU2359372C1 |
| АЗИМУТАЛЬНО-УГЛОМЕСТНАЯ АНТЕННАЯ УСТАНОВКА С ЧЕТЫРЕХЗЕРКАЛЬНЫМ ЛУЧЕВОДОМ | 1995 |
|
RU2094916C1 |
| КОМПЛЕКС ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ СКВАЖИННЫХ ИНКЛИНОМЕТРОВ | 2010 |
|
RU2439493C1 |

Изобретение относится к антенной технике. Технический результат - устранение наличия «мертвой зоны» в области углов места, примыкающих к зениту, для азимутально-угломестного режима и в области углов места, примыкающих к горизонту, для угломестно-угломестного режима с сохранением возможности уравновешивания массы зеркальной антенны при помощи противовесов. Трехосное опорно-поворотное устройство содержит азимутальный поворотный механизм, состоящий из колонны в виде стальной трубы с закрепленным на ней азимутальным силовым приводом, вокруг которого на подшипниках вращается азимутальная ферма, и угломестный поворотный механизм, состоящий из угломестного силового привода и угломестной поворотной платформы, состоящей из угломестной оси в виде стальной трубы и приваренной к ней первой стальной плиты, к которой пристыковывается балка с двумя опорами вращения зеркала, и второй стальной плиты, приваренной с противоположной стороны к угломестной оси, к которой крепится противовес и кронштейн крепления винтового домкрата, кронштейн крепления проушины домкрата, закрепленный на зеркале, винтовой домкрат с приводом, при этом азимутальный и угломестный поворотные механизмы и механизм угла наклона снабжены датчиками углового положения. 2 ил.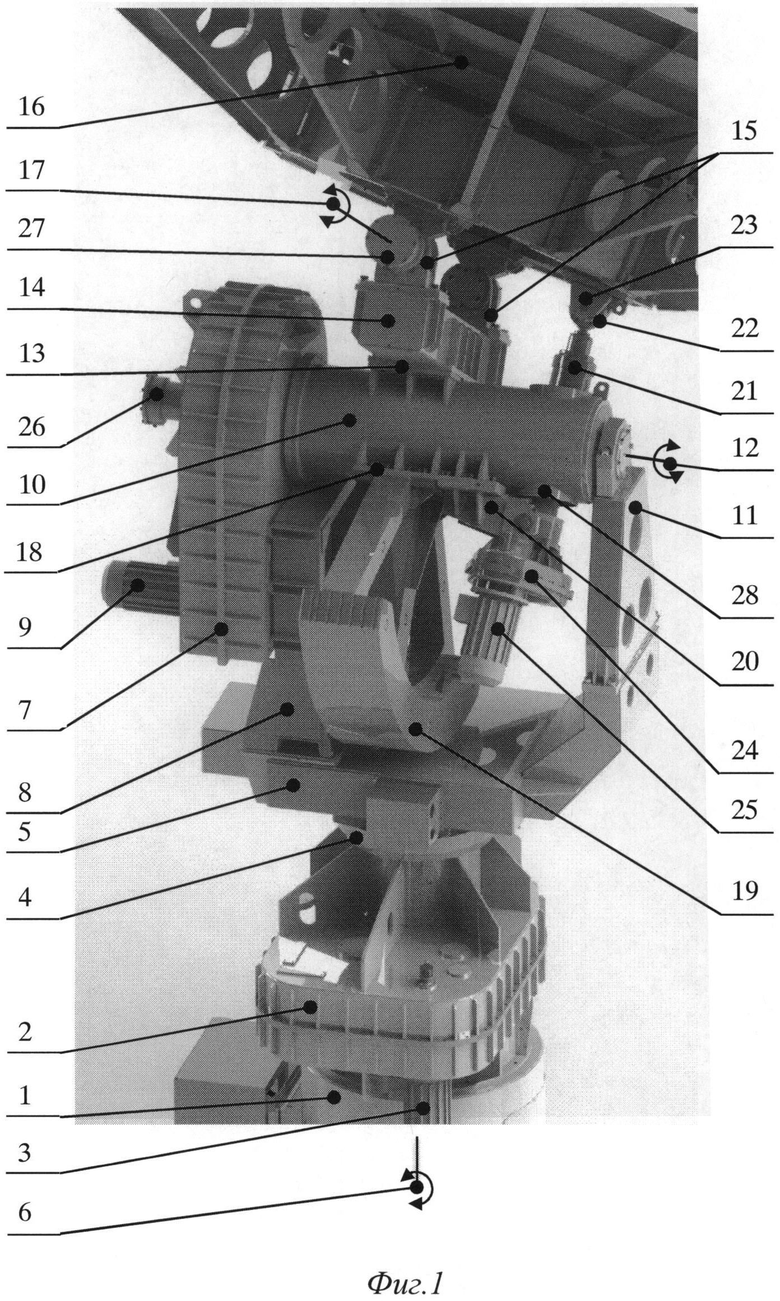
Трехосное опорно-поворотное устройство, содержащее азимутальный поворотный механизм, состоящий из колонны в виде стальной трубы с закрепленным на ней азимутальным силовым приводом, вокруг которого на подшипниках вращается азимутальная ферма, и угломестный поворотный механизм, состоящий из опоры угломестного редуктора и опоры угломестной платформы, смонтированных на азимутальной ферме, угломестного силового привода и угломестной поворотной платформы, состоящей из угломестной оси в виде стальной трубы и приваренной к ней первой стальной плиты, к которой пристыковывается зеркало, и второй стальной плиты, приваренной с противоположной стороны к угломестной оси, к которой крепится противовес, при этом азимутальный и угломестный поворотные механизмы снабжены азимутальным и угломестным датчиками углового положения, отличающееся тем, что добавлены балка с двумя опорами вращения зеркала, закрепленная на первой стальной плите, кронштейн крепления винтового домкрата, закрепленный на второй стальной плите, кронштейн крепления проушины домкрата, закрепленный на зеркале, винтовой домкрат с приводом, датчик угла наклона.
| Станочные тиски | 1943 |
|
SU63985A1 |
| АЗИМУТАЛЬНО-УГЛОМЕСТНАЯ АНТЕННАЯ УСТАНОВКА С ЧЕТЫРЕХЗЕРКАЛЬНЫМ ЛУЧЕВОДОМ | 1995 |
|
RU2094916C1 |
| RU 2052895 C1, 20.01.1996 | |||
| СПОСОБ ИЗВЛЕЧЕНИЯ МЫШЬЯКА ИЗ ВОДНЫХ РАСТВОРОВ | 2008 |
|
RU2395600C2 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| EP 1727236 A1, 29.11.2006 | |||

