Изобретение относится к средствам метрологического обеспечения приемоиндикаторов и может быть использовано для метрологического обеспечения приемоиндикаторов КНС ГЛОНАСС (GPS и др.).
Известно, что метрологическая поверка приемоиндикаторов (ПИ) КНС ГЛОНАСС - GPS производится в соответствии с инструкцией и методикой поверки. Существуют следующие методики поверки:
- аппаратура потребителя - навигационная малогабаритная КНС ГЛОНАСС/ДЖИ-ПИ-ЭС «ГРОТ-М» (индекс 14Ц22). Проверка аппаратуры проводится в соответствии с ГОСТ РВ 52271-2004;
- комплекс навигационно-геодезической космической системы «ГРОТ-ТК» (индекс 14Ц824). Методика устанавливает методы и средства первичной и внеочередной поверок, проводимых в соответствии с ПР 509.2.006-94;
- приемоиндикаторы возимые «ГРОТ-В» (индекс 14Ц821).
Указанные методики базируются на традиционных методах определения погрешностей измерения координат, высоты объекта, составляющих вектора скорости и синхронизации шкалы времени ПИ к шкалам системного времени ГЛОНАСС и GPS.
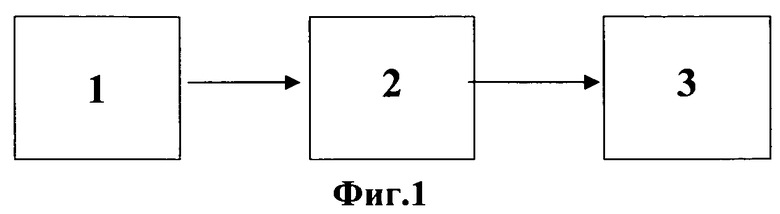
В настоящее время принята блок-схема установки для калибровки ПИ (фиг.1).
Фиг.1 - стандартное рабочее место калибровки ГВЗ, где:
1 - имитатор сигналов ГЛОНАСС,
2 - калибруемый приемник,
3 - ПЭВМ для записи и обработки (в том числе и статистической) результатов измерения задержки.
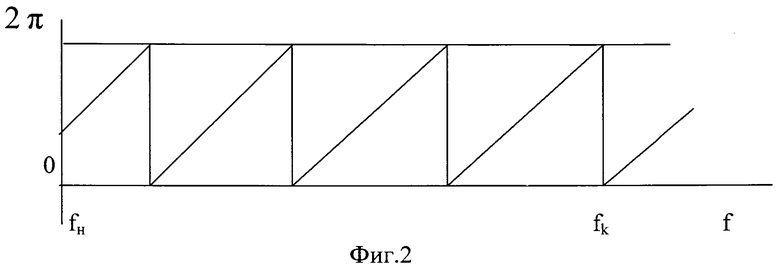
Фиг.2 - Вид фазочастотных характеристик (ФЧХ), измеренных фазометром в диапазоне (0-2 π) в диапазоне частот fн - fk.
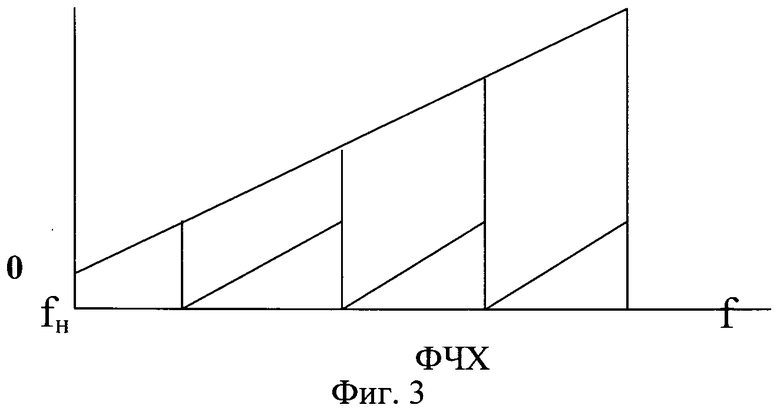
Фиг.3 - ФЧХ идеализированного (без фильтров и реактивных элементов) радиотракта как линейная функция частоты, содержит (в достаточно широком диапазоне частот) несколько целых фазовых фильтров.
Фиг.4 - Блок-схема предлагаемого эталонного рабочего места калибровки ГВЗ, где:
4 - синтезатор сетки испытательных частот fi с равномерным шагом Δf,
5 - модулятор сигналов испытательных частот,
6 - аппаратная копия системы слежения за несущей (ССН) калибруемого приемника,
7 - калибруемый приемник.
Фиг.5 - Блок-схема предлагаемого эталонного рабочего места прецизионной калибровки задержки огибающей на литерных частотах ГЛОНАСС (GPS и др.), где блок 8 - ПЭВМ для обработки результатов калибровки.
Групповое время запаздывания (ГВЗ) - разное на разных литерных частотах ГЛОНАСС - результат неравномерности фазочастотной характеристики сквозного радиотракта. Основной вклад в ГВЗ вносят фильтры промежуточных частот (ФПЧ) аналогового тракта приемника.
Обычно ГВЗ на разных литерных частотах ГЛОНАСС (системы с частотным разделением сигналов спутников) калибруют непосредственным измерением времени задержки фронтов дальномерного кода относительно эталонного сигнала. Будем называть этот способ калибровкой ГВЗ во временной области. Функциональная схема рабочего места для калибровки ГВЗ этим способом приведена на фиг.1, примем его за прототип, где обозначено:
1 - имитатор сигналов ГЛОНАСС,
2 - калибруемый приемник,
3 - ПЭВМ для записи и обработки (в том числе и статистической) результатов измерения задержки.
Иногда вместо имитатора сигналов используют «эталонный приемник», который подключают к общей антенне вместе с анализируемым приемником через сплиттер (т.н. способ нуль-базы). В любом случае калибровка во временной области относительна. Она проводится относительно эталона, ГВЗ которого в общем случае неизвестно, более того нестабильно во времени (зависит от климатических условий и подвержено изменению из-за старения элементов ФПЧ). То же относится и к имитатору сигналов ГЛОНАСС в качестве эталона. Дело в том, что в имитаторах сигналов ГЛОНАСС эталонные сигналы формируют на низкой частоте, а затем переносят преобразованием частоты вверх на несущие литерные частоты ГЛОНАСС. Обычный преобразователь частоты включает ФПЧ (после смесителя) для выделения продукта преобразования (в данном случае) с суммарной частотой. Для ГЛОНАСС этот ФПЧ должен пропускать весь диапазон литерных частот плюс ширина спектра дальномерного кода, т.е. его полоса пропускания должна быть не менее 20 МГц. Это означает, что ФПЧ должен быть многозвенным. Другими словами он не может иметь равномерную ФЧХ в полосе пропускания. А это означает, что имитатор сигналов ГЛОНАСС будет иметь неизвестные (и нестабильные) ГВЗ на литерных частотах ГЛОНАСС имитатора.
Недостатки прототипа рабочего места относительной калибровки ГВЗ во временной области - фиг.1 - низкая точность калибровки ГВЗ по следующим причинам:
1) неизвестные ГВЗ эталонного средства;
2) низкая точность измерений во временной области (кодовых измерений задержки сигналов);
3) невозможность учета задержки, непосредственно вызванной нелинейностью фазочастотных характеристик.
Эти недостатки устраняет предлагаемое эталонное рабочее место для прецизионной калибровки ГВЗ ГЛОНАСС известным в теории фазочастотным методом (ФЧМ).
Задачей предлагаемого технического решения является повышение точности калибровки запаздывания огибающей литерных частот в приемнике сигналов ГЛОНАСС.
Поставленная задача решается за счет того, что вышеуказанные недостатки прототипа устраняются тем, что для построения ФЧХ калибруемого приемника не требуется никаких эталонов, вносящих свои погрешности в калибровку, а ФЧМ используют для калибровки полной задержки на литерных частотах ГЛОНАСС - фазовые измерения (измерения набегов фазы на заданных интервалах времени), обладающие примерно на 3 порядка более высокой точностью измерений приращений задержки по сравнению с измерениями во временной области (кодовыми измерениями).
Сущность изобретения пояснена чертежами (фиг.1-5).
Фиг.1 - блок-схема прототипа:
1 - имитатор сигналов ГЛОНАСС,
2 - калибруемый приемник,
3 - ПЭВМ для записи и обработки (в том числе и статистической).
Как следует из теории, запаздывание огибающей гармонического сигнала (в нашем случае фронтов дальномерного кода) имеет две составляющие:
1) Непосредственно вызванную нелинейностью их.
Полная фаза гармонического колебания на выходе идеализированного радиотракта (без фильтров и реактивных элементов) равна фазе на его входе

2) Для реального радиотракта в правой части (1) добавляется φ(f) - его фазочастотная характеристика φ(f)

Обозначим набег фазы по (1) на интервале отсчетов фазовых измерений Δt через 
Использование свип-генератора для построения ФЧХ нецелесообразно по причине низкой точности. Более рационально использование сетки испытательных частот с равномерным шагом Δf, формируемых синтезатором, тогда для отсчетов ФЧХ φi можно записать:

Поскольку диапазон однозначности фазометра составляет (0-2 π), измерения ФЧХ идеализированного (без фильтров и реактивных элементов) радиотракта имеет вид, показанный на фиг.2. Она содержит (в достаточно широком диапазоне частот) несколько целых фазовых циклов.
Из графика фиг.2 можно перестроить ФЧХ как непрерывную функцию частоты, просуммировав скачки фазометра на 2π (фиг.3).
Набег фазы сигнала с частотой fi на интервале Δt равна 2πfi Δt. Если fiΔt=1, то этот набег равен 2π - полный фазовый цикл, соответствующий длине волны λi. Из этих соображений можно составить пропорцию

Разрешив ее относительно задержки τi, получим:

Набеги фаз υi, соответствующие идеализированному радиотракту, целесообразно формировать с помощью копии ССН копируемого приемника по следующим причинам:
1. Начальные фазы сигналов испытательных частот, формируемых синтезатором, могут меняться в зависимости от частот fi, т.е. это φ0i.
2. За время калибровки могут существенно изменяться задаваемые частоты fi из-за нестабильности опорного генератора в синтезаторе.
В силу линейности выражений (1-3) и операций формирования набегов фаз υi с помощью копии ССН справедливо тождество:

и для задержки огибающей, вызванной непосредственно нелинейностью τнi, можно записать:

3. Собственно ГВЗ на частотах от fi
По определению ГВЗ равно производной ФЧХ по частоте

или для дискретных отсчетов

Δφi - приращение соседних φi, равное φi+1-φi,
φi - по формуле (3).
Просуммировав τнi (7) и τгi (9), получим спектральную плотность задержки огибающей (фронтов дальномерного кода) или парциальные задержки. Для получения задержек на литерных частотах ГЛОНАСС парциальные задержки необходимо усреднить по спектрам псевдослучайной последовательности (ПСП) дальномерного кода, устанавливая поочередно центральную частоту этого спектра на j-е литерные частоты (или ближайшие к ним испытательные fi) по формуле:

где pij - отсчеты спектра ПСП на частотах fi при смещении центральной частоты спектра к j-й литерной.
На блок-схемах фиг.4, 5 обозначено:
4 - синтезатор сетки испытательных частот fi с равномерным шагом Δf,
5 - модулятор сигналов испытательных частот,
6 - аппаратная копия системы слежения за несущей калибруемого приемника,
7 - калибруемый приемник,
8 - ПЭВМ для обработки результатов калибровки.
Предполагаемое устройство (фиг.5) работает следующим образом.
Синтезатор 4 формирует последовательно частоты fi с шагом Δf в десятки кГц. Желательна автоматизация коммутации частот fi. Испытательные частоты для построения ФЧХ должны охватывать диапазон литерных частот ГЛОНАСС, расширенный справа и слева на 2-3 лепестка спектра псевдослучайной последовательности (ПСС) дальномерного кода. Если полоса частот сквозного радиотракта калибруемого приемника меньше диапазона испытательных частот, возможна их подавление в приемнике. Амплитуда испытательных сигналов должна на 10-20 дБ превышать амплитуду реального спутникового сигнала. Это обеспечит быстрый надежный захват испытательных сигналов калибруемым приемником, после чего его входной коррелятор по коду восстановит несущую. Подавление испытательных частот на краях диапазона их сетки можно компенсировать соответствующим повышением амплитуд сигналов испытательных частот или усреднением нескольких фазовых отсчетов на каждой из них.
Модулятор 5 представляет собой инвертор входных сигналов, управляемый ПСП кода.
Блок 6 имитирует работу ССН идеализированного радиотракта (отслеживает входной сигнал по частоте с точностью до фазы) на интервале отсчетов фазовых измерений реального радиотракта калибруемого приемника Δt. Поскольку калибруемый приемник 7 может иметь разные структуры ССН (порядок астатизма, параметры петлевого фильтра следящего контура), его желательно выполнить на реконфигурируемой программируемой логической интегральной схеме (ПЛИС). Если рабочие частоты ПЛИС ниже частоты fi, то возможно в копии ССН использовать аналоговый генератор, управляемый напряжением (ГУН) отслеживаемых частот fi и ЦАП после петлевого фильтра на ПЛИС в замкнутом контуре.
Калибруемый приемник 7 формирует отсчеты набегов фаз Ψi на интервалах Δt, которые последовательно подают на вход ПЭВМ-8. В ПЭВМ одновременно с Ψi поступают набеги фаз υi от блока 6. Разности Ψi и υi, деленные на Δt, и есть интересующие нас отсчеты ФЧХ φI, формируемые в соответствии со схемой предлагаемого рабочего места.
В ПЭВМ-8 вычисляют отсчеты спектра ПСП pi для частот fi. Центральная частота спектра вначале принимается равной нулю, отсчеты pi располагаются справа и слева от f=0. Предварительно вычисляют задержки τнi, вызванные нелинейностью ФЧХ, по формуле (7), затем вычисляют приращение Δφi, для соседних частот fi, делят эти приращения на Δf и получат отсчеты спектральной плотности ГВЗ (парциальные ГВЗ τгi). Эти парциальные ГВЗ суммируют с τнi и усредняют с отсчетами спектра pij, предварительно сдвигая центральную частоту спектра последовательно к значениям fj, к каждой литерной частоте fj по формуле (10).
Промышленное применение технической сложности не представляет, так как устройство может быть построено в основном на серийно выпускаемых блоках.
| название | год | авторы | номер документа |
|---|---|---|---|
| Приемник аппаратуры потребителей сигналов глобальных спутниковых навигационных систем | 2017 |
|
RU2649879C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2010 |
|
RU2446410C1 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| СПОСОБ И УСТРОЙСТВО ПРЯМОГО ПРЕОБРАЗОВАНИЯ ЧАСТОТЫ ДЛЯ ПРИЕМНИКОВ СПУТНИКОВОЙ НАВИГАЦИИ ГЛОНАСС | 2014 |
|
RU2562443C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2802323C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ЗАДЕРЖКОЙ ФРОНТОВ ДАЛЬНОМЕРНОГО КОДА СИГНАЛОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2006 |
|
RU2319977C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ИОНОСФЕРНОЙ ОШИБКИ ДАЛЬНОСТЕЙ ПО ДВУХЧАСТОТНЫМ ИЗМЕРЕНИЯМ | 2005 |
|
RU2333507C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1998 |
|
RU2158937C2 |

Изобретение относится к средствам метрологического обеспечения приемоиндикаторов КНС ГЛОНАСС. Технический результат состоит в повышении точности калибровки запаздывания огибающей литерных частот. Для этого эталонное рабочее место прецизионной калибровки запаздывания огибающих литерных частот в приемниках сигналов ГЛОНАСС состоит из источника испытательных сигналов, калибруемого приемника и ПЭВМ для обработки результатов калибровки. В качестве источника испытательных сигналов используют синтезатор сетки испытательных частот, модулированных по фазе на ±90° дальномерным кодом псевдослучайной последовательности ГЛОНАСС. В ПЭВМ вводят набеги фаз, последовательно измеренные системой слежения за несущей (ССН) калибруемого приемника на интервале Δt. Вычитают из них набеги фаз, измеренные на тех же интервалах Δt аппаратной копии ССН калибруемого приемника, делят эти разности на Δt и получают отсчеты ФЧХ для частот. Вычисляют задержки, непосредственно вызванные нелинейностью ФЧХ, измеряют собственно ГВЗ, суммируют эти задержки и получают спектральную плотность задержек, или парциальные задержки, которые усредняют со спектром псевдослучайной последовательности дальномерного кода, смещая последовательно центральную частоту спектра к ближайшей литерной. 5 ил. 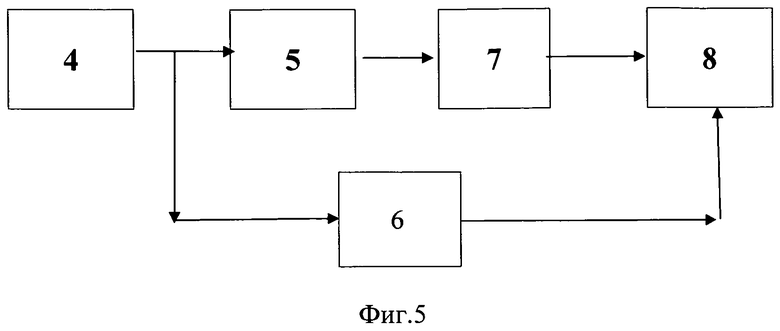
Эталонное рабочее место прецизионной калибровки запаздывания огибающих литерных частот в приемниках сигналов ГЛОНАСС, включающее источник испытательных сигналов, калибруемый приемник и ПЭВМ для обработки результатов калибровки, отличающееся тем, что в качестве источника испытательных сигналов используют синтезатор сетки испытательных частот fi, модулированных по фазе на ±90° кодом псевдослучайной последовательности (ПСП) ГЛОНАСС, в ПЭВМ вводят набеги фаз Ψi, последовательно измеренные системой слежения за несущей (ССН) калибруемого приемника на интервале Δt, вычитают из них набеги фаз υi, измеренные на тех же интервалах Δt, аппаратной копии ССН калибруемого приемника, делят эти разности на Δt и получают отсчеты ФЧХ φi для частот fi, вычисляют задержки, непосредственно вызванные нелинейностью ФЧХ, по формуле τнi=φi/2πfi-1, выполняют измерения собственно ГВЗ по формуле τri=1/2π(φi+1-φi)/Δf, суммируют эти задержки и получают спектральную плотность задержек, или парциальные задержки τ0i, парциальные задержки усредняют со спектром ПСП, смещая последовательно центральную частоту спектра к fi, ближайшей к j-й литерной, по формуле τj=Σpijτij/Σpij.
| ПРИЕМНИК АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СИГНАЛОВ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2007 |
|
RU2416102C2 |
| ПРИЕМНИК АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СИГНАЛОВ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2195685C1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

