Изобретение относится к области повышения точности спутниковой навигации, в частности к способам устранения ионосферных ошибок измерения дальностей в радионавигационных приемниках.
В любом приемнике навигационной аппаратуры потребителей (НАП) измеряют псевдодальности (ПД) до каждого видимого спутника и псевдодоплеровские интегралы (ПДИ). ПДИ представляют собой приращения ПД на интервалах интегрирования Δt набегов фазы несущей. Погрешности измерения ПД включают систематические, вызванные неидентичностью опорных генераторов спутника и НАП и задержкой распространения сигналов в тропосфере. Эти погрешности не зависят от частоты несущей, в то время как ионосферная задержка в первом и достаточном для двухчастотных измерений приближении обратно пропорциональна квадрату этой частоты [1, с.84]. Однако математическая зависимость ионосферной задержки в дальностях от ПДИ до известного уровня техники отсутствует.
Известны способ и устройство определения параметров локальной модели ионосферы для вычисления ионосферных ошибок по двухчастотным кодовым измерениям в приемниках GPS - патент США №5428358 от 27.06.1995 г. [2], заключающийся в формировании линейной комбинации этих измерений для исключения систематических ошибок и выделения ионосферной ошибки на первой частоте; построении локальной модели вертикальной ионосферной ошибки дальности в окрестности расположения потребителя в виде ограниченного ряда Тейлора нескольких переменных со степенями, не превышающими двух; формировании системы уравнений, связывающих вышеуказанные линейные комбинации с коэффициентами локальной модели ошибки; решении вышеуказанной избыточной системы линейных уравнений способом наименьших квадратов; графическом отображении сформированной карты вертикальной ионосферной ошибки. Данный способ позволяет определять ионосферную ошибку дальностей по двухчастотным псевдодальномерным измерениям, а также устройство, реализующее способ, включает двухчастотный приемник НАП с измерителями радионавигационных параметров и процессор. Примем его за прототип.
Однако этот способ имеет недостатки, такие как высокий уровень измерительных шумов и ошибок, вызванных многолучевым распространением сигналов спутников из-за отражений от местных предметов, окружающих приемную антенну НАП в кодовых измерениях ПД по задержке дальномерного кода. Это требует увеличения времени для их сглаживания. В свою очередь, увеличение этого времени приводит к необходимости учета временной изменчивости параметров модели ионосферы: как вертикальной задержки, так пространственных градиентов включением дополнительных неизвестных в число оцениваемых параметров. Но увеличение числа оцениваемых неизвестных ухудшает обусловленность задачи и приводит к ухудшению случайных составляющих всех оценок. Кроме того, межчастотные задержки в радиотракте как спутникового передатчика, так и приемника НАП имеют уровень в единицы метров, проявляются в измерениях как их сумма и не могут быть разделены в процессе их обработки. Поэтому задержки в НАП в соответствии с прототипом должны быть заранее откалиброваны, а спутниковые задержки включают дополнительно в число неизвестных параметров модели. В соответствии с вышеизложенным локальная модель ионосферы по способу-прототипу содержит (6+4+m) неизвестных параметров: 6 параметров пространственной локальной модели ионосферы "замороженной" на фиксированный момент времени, 4 параметра временной изменчивости за время накопления измерений и m - межчастотных задержек для m спутников. Увеличение числа спутников, измерения которых включают в обработку для уточнения параметров модели ионосферы, полезного эффекта не дает, поскольку каждый дополнительный спутник вносит свою межчастотную задержку в число неизвестных, подлежащих оцениванию. Некоторым компромиссом, принятым в прототипе для обработки информации 5 спутников, является время накопления измерений в 90÷120 минут.
Все это ограничивает достижимую точность и применение способа и устройства-прототипа в НАП областью дорогостоящих приемников, в основном стационарных наземных. При этом реально достижимая погрешность определения ионосферной ошибки в дальности более чем в 100 раз превышает потенциальную для двухчастотных измерений.
В основу изобретения поставлена задача создания такого способа, в котором повысится точность локальной модели вертикальной ионосферной ошибки, уменьшится время накопления измерений, снизятся требования к производительности процессора и устранятся ионосферные ошибки измерений.
Поставленная задача решается тем, что вместо грубых кодовых измерений псевдодальностей используют точные доплеровские их приращения на двух когерентных частотах f1 и f2.
Доплеровские измерения представляют собой лишь приращения дальностей на интервале Δt, что не позволяет связать их непосредственно с абсолютными величинами ионосферных ошибок, но обладают примерно в 1500 раз меньшим уровнем измерительных шумов и примерно в 200 раз меньшим уровнем ошибок многолучевости по сравнению с измерениями ПД. Кроме того, ПДИ не содержит (по определению) ошибок, вызванных межчастотными задержками в радиотрактах.
Для связи доплеровских измерений с ионосферной ошибкой дальностей используют факторизацию этой ошибки в виде [1, с.85]

где δDV1j ион - вертикальная задержка на частоте f1 в подионосферной точке, то есть проекции на поверхность Земли точки "прокола" тонкого сферического ионосферного слоя лучом, соединяющим НАП с j-м спутником (j=1, 2...m);
m - количество видимых навигационных спутников;
ψj - угол возвышения j-го спутника над горизонтом НАП.
Ф(ψ) - фактор угла наклона, который вычисляют по известной формуле для тонкого сферического ионосферного слоя, например:
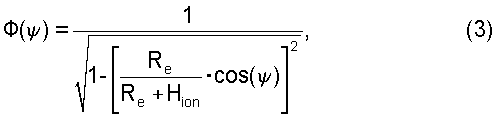
где Re - радиус Земли (Re≈6400 км);
Нion - высота расположения над поверхностью Земли тонкого сферического ионосферного слоя (Нion≈400 км).
Оба сомножителя в (2) являются функциями времени. Вертикальная задержка зависит от освещенности ионосферы (времени суток), солнечной активности и изменения географических координат подионосферной точки, вызванного орбитальным движением j-го спутника. Значение функции наклонного луча зависит от текущей высоты спутника ψj над горизонтом потребителя.
Дифференцируя обе части вышеприведенного выражения (2) по времени, получают

где δV1j ион - ионосферная ошибка радиальной скорости на частоте f1 для j-го спутника.
Кроме того, в отличие от ПД, используемых для определения параметров локальной модели ионосферы в способе-прототипе, для исключения систематических ошибок измерений псевдодоплеровских интегралов и выделения ионосферной ошибки радиальной скорости, например, на первой частоте используют следующую линейную комбинацию:

где λ1 и λ2 - длины волн излучаемых спутниками радиосигналов на частотах f1 и f2 соответственно;
ПДИ1ji и ПДИ2ji - псевдодоплеровские интегралы, измеренные на этих частотах (набеги фаз несущих), выраженных в фазовых циклах (безразмерные величины);
Δt - время накопления ПДИ, причем индекс j соотносит переменные с номером спутника, а индекс i - с моментом времени ti.
В связи с использованием существенно более точных измерений ограничивают время их накопления интервалом, на котором состояние ионосферы практически не меняется. По результатам экспериментальной отработки предлагаемого способа этот интервал составляет несколько десятков секунд.
Таким образом полученные ионосферные ошибки радиальных скоростей δV1ji ион усредняют по времени на интервалах в несколько десятков секунд, где состояние ионосферы считают неизменным - "замороженным", например, по известной формуле среднего арифметического:

На основании вышеизложенного упрощают локальную модель ионосферы, для чего исключают члены разложения в ряд Тейлора, связанные со временем (4 неизвестных коэффициента), а также m неизвестных межчастотных задержек для m спутников, поскольку ПДИ на разных частотах их не содержит. Последнее обстоятельство позволяет использовать измерения всех видимых спутников для повышения точности построения локальной модели "замороженной" ионосферы на интервалах в несколько десятков секунд.
Временные зависимости оценок вертикальной задержки оставшихся 6 коэффициентов разложения в двумерный ряд Тейлора (с отбрасыванием членов степени выше второй) используют для дополнительного (полиномиального) сглаживания временных рядов этих оценок на больших интервалах времени, тем самым осуществляют мониторинг состояния ионосферы.
Кроме того, для вертикальных ионосферных ошибок дальностей записывают упрощенную модель в виде двумерного разложения в ряд Тейлора в окрестности НАП по степеням широтного и долготного отклонений подионосферных точек от соответствующих координат текущего положения НАП, ограниченный членами не выше второй степени:

где δDV1 ион(x, y) - функция пространственного распределения вертикальной ионосферной ошибки дальности;
аk - параметры модели, k=0, 1...5;
x и y - величины, связанные с разностями долгот и широт подионосферной точки и НАП:


где ϕ0, λ0 - географическая широта и долгота НАП;
ϕ, λ - географическая широта и долгота подионосферной точки;
А - азимут подионосферной точки;
α - угол между радиус-векторами НАП и подионосферной точкой. Этот угол вычисляют по формуле [2]

Подставляя выражение (7) в формулу (4), выполнив дифференцирование по времени и приравнивая левые части равенств (4) и (5) для каждого j-го спутника, получают систему m (по числу обрабатываемых спутников) уравнений для 6 неизвестных аk.
Линейную комбинацию измеряемых ПДИ (5), выраженную через параметры модели аk, записывают в форме

Частные производные hjk по параметрам модели аk имеют вид
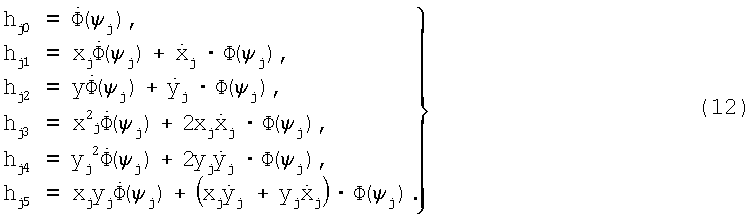
Производную  формируют численным дифференцированием (3):
формируют численным дифференцированием (3):

где Ф(ψ(t1)) и Ф(ψ(t2)) - значения функции, вычисленные в моменты времени t1 и t2 соответственно.
Производные  и
и  вычисляют численным дифференцированием так же, как и
вычисляют численным дифференцированием так же, как и  .
.
Для связи доплеровских измерений с ионосферными ошибками дальностей также дифференцируют по времени выражение для вышеупомянутой ошибки в виде пространственной модели и получают уравнения, связывающие сглаженные по времени линейные комбинации доплеровских измерений для j-х спутников с вертикальными ионосферными ошибками дальностей в j-х подионосферных точках, причем систему этих m уравнений для 6 неизвестных параметров аk записывают в матричном виде:

где  - вектор линейных комбинаций измерений в моменты времени ti;
- вектор линейных комбинаций измерений в моменты времени ti;
 - вектор неизвестных параметров;
- вектор неизвестных параметров;
Н - матрица частных производных;
i=1, 2...n, где n - число измерений, a δV1ji ион вычисляют по формуле (5) для разных моментов времени ti.
Избыточную (переопределенную) систему уравнений (14) ((n·m)>6) решают известным способом наименьших квадратов:

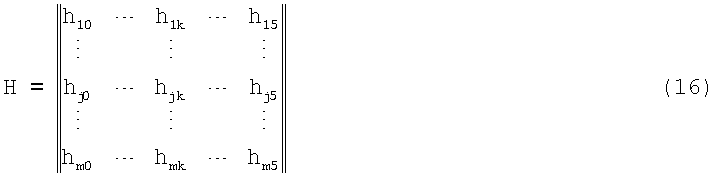
С учетом (6) размерность матрицы Н уменьшится в десятки раз и станет равной k×m, где m - число обрабатываемых спутников, k - число неизвестных параметров модели (k=6).
В способе-прототипе Н имеет размерность, например, не менее 15×1200 (считают, что на 30-секундном интервале ионосфера не изменяется).
С учетом вышеизложенного матрицу Н формируют из частных производных hjk (12), вычисленных на середину интервала сглаживания [t1; tn]:
Определив параметры локальной модели вертикальной ионосферной ошибки дальности в окрестности расположения НАП из решения системы уравнений (15), сглаживают полученные величины ak временными полиномами на интервалах в несколько десятков минут. Сглаженные параметры модели подставляют в (7) и получают значение вертикальной ионосферной ошибки дальности δDV1j ион. Умножая δDV1j ион на фактор угла наклона j-го спутника, получают его наклонную ионосферную ошибку дальности.
Устройство, реализующее способ, включает двухчастотный приемник НАП с измерителями радионавигационных параметров и процессор, осуществляющий решение как навигационной задачи, так и реализацию вышеупомянутого способа определения ионосферной ошибки дальностей по двухчастотным измерениям, причем в качестве радионавигационных параметров используют псевдодоплеровские интегралы, полученные как кодовым (стандартным) способом сопровождения несущих частот f1 и f2, так и бескодовым (полубескодовым) сопровождением частоты f2.
Источники информации
1. Dennis Odijk, Fast precise GPS positioning in the presence of ionospheric delays. Delft, 2002. 262 pages.
2. United States Patent №5428358 Apparatus and method for ionospheric mapping. 27.06.1995 г.
3. Schaer S. (1999), Mapping and Predicting the Earth's Ionosphere Using the Global Positioning System, Ph.D.Thesis, Astronomical Institute, University of Berne, 205 pages.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ТРОПОСФЕРНЫХ И ИОНОСФЕРНЫХ ОШИБОК ИЗМЕРЕНИЯ В ОДНОЧАСТОТНЫХ ПРИЁМНИКАХ СПУТНИКОВОЙ НАВИГАЦИИ | 2002 |
|
RU2237257C2 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОТРЕБИТЕЛЯ В СИСТЕМАХ ГЛОНАСС/GPS И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2486544C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2016 |
|
RU2624634C1 |
| СПОСОБ ОБРАБОТКИ РАДИОНАВИГАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2439616C2 |
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКАХ СПУТНИКОВОЙ НАВИГАЦИИ | 2001 |
|
RU2237256C2 |
| СПОСОБ ОБНАРУЖЕНИЯ, ИЗМЕРЕНИЯ ФАЗОВОЙ СКОРОСТИ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2000 |
|
RU2189052C2 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| УСТРОЙСТВО И СПОСОБ СПУТНИКОВОГО РАДИООПРЕДЕЛЕНИЯ | 1996 |
|
RU2181490C2 |
Изобретение относится к способам устранения ионосферных ошибок измерения дальностей в радионавигационных приемниках. Заявленный способ заключается в формировании линейной комбинации измерений дальностей для исключения систематических ошибок и выделении ионосферной ошибки, построении локальной модели вертикальной ионосферной ошибки дальности в окрестности расположения потребителя в виде ограниченного ряда Тейлора нескольких переменных со степенями, не превышающими двух, формировании системы уравнений, связывающих вышеуказанные линейные комбинации с коэффициентами локальной модели ошибки, решении вышеуказанной избыточной системы линейных уравнений способом наименьших квадратов, в котором вместо грубых кодовых измерений псевдодальностей используют точные доплеровские их приращения на двух когерентных частотах f1 и f2. Достигаемым техническим результатом изобретения является устранение ионосферных ошибок измерений.
Способ устранения ионосферных ошибок измерения дальностей до видимых спутников в радионавигационных приемниках аппаратуры потребителей, заключающийся в том, что в радионавигационных приемниках аппаратуры потребителей осуществляют измерения параметров принятых спутниковых сигналов, измеряют дальности до видимых спутников, исключают из измерения дальности систематическую ошибку измерений за счет формирования линейных комбинаций этих измерений на двух известных частотах принятых сигналов, формируют локальную модель вертикальной ионосферной ошибки дальности в виде вертикальной задержки сигнала в ионосфере и ее градиентов по широте и долготе в окрестности расположения аппаратуры потребителя, отличающийся тем, что в качестве измеренных параметров принятых спутниковых сигналов при формировании локальной модели вертикальной ионосферной ошибки дальности используют доплеровские приращения дальностей на двух когерентных частотах в виде приращений псевдодальностей на интервалах интегрирования набегов фазы несущей соответствующего спутникового сигнала, с обеспечением исключения ошибок, вызванных межчастотными задержками в радиотрактах радионавигационных приемников аппаратуры потребителей для видимых навигационных спутников и ограничения времени накопления измерений интервалом, на котором состояние атмосферы практически не меняется, параметры локальной модели вертикальной ионосферной ошибки дальности для моментов времени усредненных измерений сглаживают, умножают на фактор угла наклона соответствующего спутника и при оценке сформированной модели ионосферной ошибки дальности получают наклонную ионосферную ошибку дальности до соответствующего спутника.
| US 5428358 А, 27.06.1995 | |||
| СПОСОБ ПОДАВЛЕНИЯ ОШИБОК МНОГОЛУЧЕВОСТИ В ПРИЕМНИКАХ СПУТНИКОВОЙ НАВИГАЦИИ | 2001 |
|
RU2237256C2 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОКОТОЧНОГО ОТНОСИТЕЛЬНОГО МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2143123C1 |
| US 5275451 A, 04.01.1991 | |||
| Способ получения 2-гуанидинилиденовых производных 3-метилтиазолидина в виде их аддитивных солей с кислотами | 1980 |
|
SU978728A3 |

