Изобретение относится к области радионавигации и позволяет осуществить реализацию помехоустойчивой разностно-дальномерной радионавигационной системы, обеспечивающей высокоточное позиционирование.
Глобальные навигационные спутниковые системы (ГНСС) такие, как ГЛОНАСС, GPS, Galileo, Beidou имеют ряд неоспоримых преимуществ, таких как:
- полное покрытие земли и околоземного пространства;
- бесплатное использование систем;
- унификация оборудования для всех пользователей и т.д.
Но ГНСС имеют и ряд существенных недостатков:
- плохой прием сигналов в лесистых и горных местностях, в условиях городской застройки;
- недостаточная помехоустойчивость - локальные помехи небольшой мощности могут затруднить или сделать невозможным навигацию по сигналам ГНСС.
Инерциальные системы (ИНС) самостоятельно не могут решить проблему навигации в этих условиях, так как им необходима постоянная коррекция с использованием ГНСС.
Локальные системы навигации (ЛСН) дополняют системы ГНСС в случаях невозможности использования последних из-за мощных поставленных помех или отсутствия сигнала ГНСС в точке приема.
Из уровня техники известна наземная импульсно-фазовая радионавигационная система (ИФРНС) «Чайка» (Loran) [1]. Система работает на сверхдлинных волнах, включает в себя мощные передатчики (мощность более 200 кВт) и работает на расстояниях более 1000 км. Недостатком системы является низкая точность позиционирования (десятки метров).
Известна локальная радионавигационная система «Крабик» [2]. В системе используется дальномерный, разностно-дальномерный и комбинированный метод позиционирования. Используется фазовый метод измерения псевдодальности, позволяющий выполнить точные измерения на основании измерения фазы несущей частоты.
Недостатками РНС «Крабик» являются:
- низкая устойчивость к маскирующим помехам, так как фаза сигнала в высокой степени подвержена воздействию таких помех;
- низкая устойчивость к имитационным помехам, так как в системе не предусмотрено изменение кода сигнала в процессе работы, при этом имеется высокая вероятность имитации известного кода сигнала;
- возможность любого несанкционированного пользователя, имеющего соответствующий навигационный приемник, использовать данную систему для навигации.
Известна, также, локальная радионавигационная система компании ООО «ВедаПроект», представляющая собой наземное дополнение к системе ГЛОНАСС на основе псевдоспутников (ПС) [3]. Локальная радионавигационная система (ЛРНС) предназначена для обеспечения высокоточной навигации в условиях затруднения приема сигналов ГНСС GPS/ГЛОНАСС. В системе может использоваться стандартный навигационный приемник ГНСС, с минимальными программными модификациями, но с внешним конвертором, позволяющим менять диапазон используемых несущих частот.
Недостатками ЛРНС на основе ПС компании ООО «ВедаПроект» являются:
- низкая электромагнитная совместимость со стандартным оборудованием ГНСС;
- низкая устойчивость к имитационным помехам, так как в системе используются известные коды сигналов ГНСС, при этом имеется высокая вероятность имитации известного кода сигнала;
- возможность любого несанкционированного пользователя, имеющего соответствующий навигационный приемник, использовать данную систему для навигации.
Известна локальная система навигации LocataNet [4]. Навигационная система Locata представляет собой наземную сеть передатчиков, которые передают в эфир навигационные радиосигналы, в целом очень похожие на принципы работы радиосигналов спутниковых навигационных систем. Навигационный приемник, способен принимать и обрабатывать сигналы передатчиков системы Locata и самостоятельно осуществлять навигацию, в целом очень похожую на навигацию (позиционирование) по радиосигналам спутниковых навигационных систем.
Отличительной особенностью системы Locata от аналогичных систем спутниковой навигации является временное разделение каналов (временное разделение радиосигналов передатчиков); изменение в процессе работы временного расположения сигнала передатчика; отличающаяся информация навигационного сообщения в каждом передатчике; произвольные допустимые рабочие частоты подсетей; отличающаяся система синхронизации передатчиков подсети и групп подсетей.
Недостатками системы Locata являются:
- возможность любого (несанкционированного, неавторизованного) пользователя, имеющего соответствующий навигационный приемник, использовать данную систему для навигации;
- отсутствие взаимодействия (помимо сигналов передатчиков) между навигационной системой и навигационными приемниками, в частности, затрудняющее изменение сигналов передатчиков в процессе ее работы и изменения структуры и режима работы навигационной системы;
- точность позиционирования и синхронизации в системе Locata обеспечивается точным измерением фазы несущей в системе. Но фаза несущей прежде всего сбивается под действием помех;
- низкая помехоустойчивость, всем известен сигнал, используемый в системе.
Наиболее близким аналогом описываемого изобретения в настоящем патенте является локальная система навигации, описанная в патенте на изобретение 2555860 (RU) [5].
Навигационная система, описанная в данном патенте на изобретение 2555860 (RU), состоит из нескольких передатчиков, передающих радионавигационные сигналы, с помощью которых навигационный приемник, способный обрабатывать эти сигналы, в состоянии осуществить навигацию - определить свои координаты и, по возможности, другие свои характеристики, например, скорость, вектор движения и т.д. Навигационная система может содержать подсистему управления, необходимую для управления работой передатчиков и/или для взаимодействия с навигационными приемниками. Местоположение может использоваться в навигационном приемнике или пересылаться им в подсистему управления, или подсистема управления может получать его от системы связи.
Недостатками предложенной системы являются следующие моменты:
- используются отдельно приемники в абонентских терминалах и передатчики в опорных станциях, то есть реализуется только беззапросный режим, при котором невозможно использование дальномерного метода для синхронизации сети опорных станций;
- так как у абонентов нет передатчиков, то невозможно решить задачу мониторинга без использования внешней системы связи, которая может отсутствовать;
- способ синхронизации передатчиков отдельно не приводится, это значит, что для синхронизации передатчиков используется такой же метод как в системе Locata на основе измерения фазы несущей, которая подвержена воздействию помех в первую очередь;
- не приводится способ обеспечения высокоточной навигации;
- не приводится способ обеспечения устойчивости к маскирующим и имитационным помехам.
Сущность изобретения
Задачей изобретения, описанного в настоящем патенте, является создание навигационной системы с отсутствием указанных недостатков наиболее близкого аналога, характеризующейся следующими критериями:
- используется навигационный сигнал, свободный от воздействия ионосферы, тропосферы и погрешности определения эфемерид спутников;
- используются беззапросный режим и разностно-дальномерный метод позиционирования;
- повышенная точность позиционирования обеспечивается использованием помехоустойчивого оригинального способа корреляционной обработки кода сигнала (далее по тексту описания изобретения - псевдослучайной последовательности (ПСП);
- устойчивость к сгенерированным имитационным помехам (100%) обеспечивается использованием множества ПСП, динамически меняющихся по сложному закону;
- устойчивость к ретранслированным имитационным помехам обеспечивается методами борьбы с переотраженными сигналами;
- устойчивость к маскирующим помехам обеспечивается мощностью сигнала в точке приема в 10000 раз превышающей мощность сигнала ГНСС и использованием шумоподобных сигналов (ШПС), для которых подавление помехи на выходе согласованного фильтра по мощности составляет 2 В раз, где В-база ШПС сигнала.
- точная синхронизация опорных станций в беззапросном режиме обеспечивается использованием дальномерного метода и помехоустойчивого способа корреляционной обработки кода сигнала.
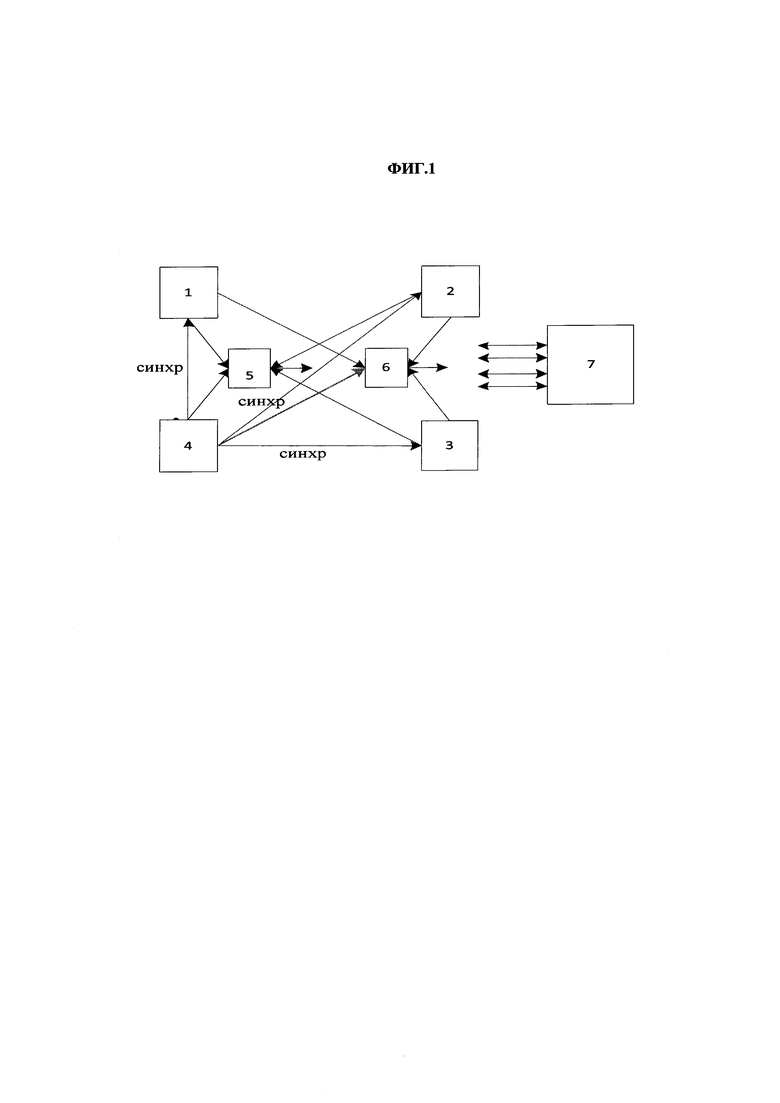
Пример структуры радионавигационной разностно-дальномерной локальной системы навигации приведен на ФИГ. 1.
Радионавигационная система представляет собой локальную систему навигации, состоящую из сети приемопередатчиков, входящих в состав радионавигационных опорных станций РОС (1-4), приемопередатчиков, входящих в состав абонентских терминалов АТ (5-6) и аппаратно-программного комплекса АПК (7).
В системе может решаться как навигационная задача, когда абонентские терминалы принимают сигналы опорных станций и определяют свои координаты, направление движения и скорость, так и задача мониторинга, когда навигационные данные от абонентских терминалов передаются на аппаратно-программный комплекс АПК (7), где собираются данные мониторинга, производится управление работой системы, в том числе управление сменой ПСП в РОС (1-4) и АТ (5-6) по сложному закону.
В системе обеспечивается беззапросный режим и разностно-дальномерный метод позиционирования.
Беззапросный режим имеет аналогию с созданием созвездия «псевдоспутников» и предполагает наличие синхронизированной сети опорных станций.
Для правильной работы системы в беззапросном режиме обеспечивается точная синхронизация опорных станций и минимальное число опорных станций в сети - 3.
Как показано на ФИГ. 1, опорные станции РОС (1-4) выдают навигационный сигнал, принимаемый абонентскими терминалами AT (5-6), которые решают навигационную задачу и определяют свои координаты. Одна из станций - ведущая РОС (4) выдает сигнал синхронизации (синхр.) на ведомые станции РОС (1, 2, 3). Для синхронизации используется навигационный сигнал с изменяемыми ПСП, передающийся от ведущей опорной станции на все опорные станции в сети. Для получения такого сигнала в режиме синхронизации требуется запрос от ведомых станций.
Достоинство беззапросного режима:
- практически неограниченное число абонентов в сети.
Техническим результатом заявляемого изобретения является обеспечение высокоточного позиционирования абонентов и синхронизации радионавигационных опорных станций в беззапросном режиме с использованием разностно-дальномерного метода позиционирования при практически неограниченном количестве пользователей системы и высокоточного способа корреляционной обработки шумоподобных сигналов, обеспечивающего сантиметровую точность позиционирования и высокую устойчивость к маскирующим и имитационным помехам.
В беззапросном режиме используется разностно-дальномерный метод для неограниченного числа абонентских терминалов, которые принимают сигнал и по разности времени прихода сигналов от нескольких опорных станций определяют свои координаты и другие параметры. При этом решение навигационной задачи лежит в точке пересечения линий положения в виде гипербол, фокусы которых находятся в местах расположения опорных станций (1, 2, 3).
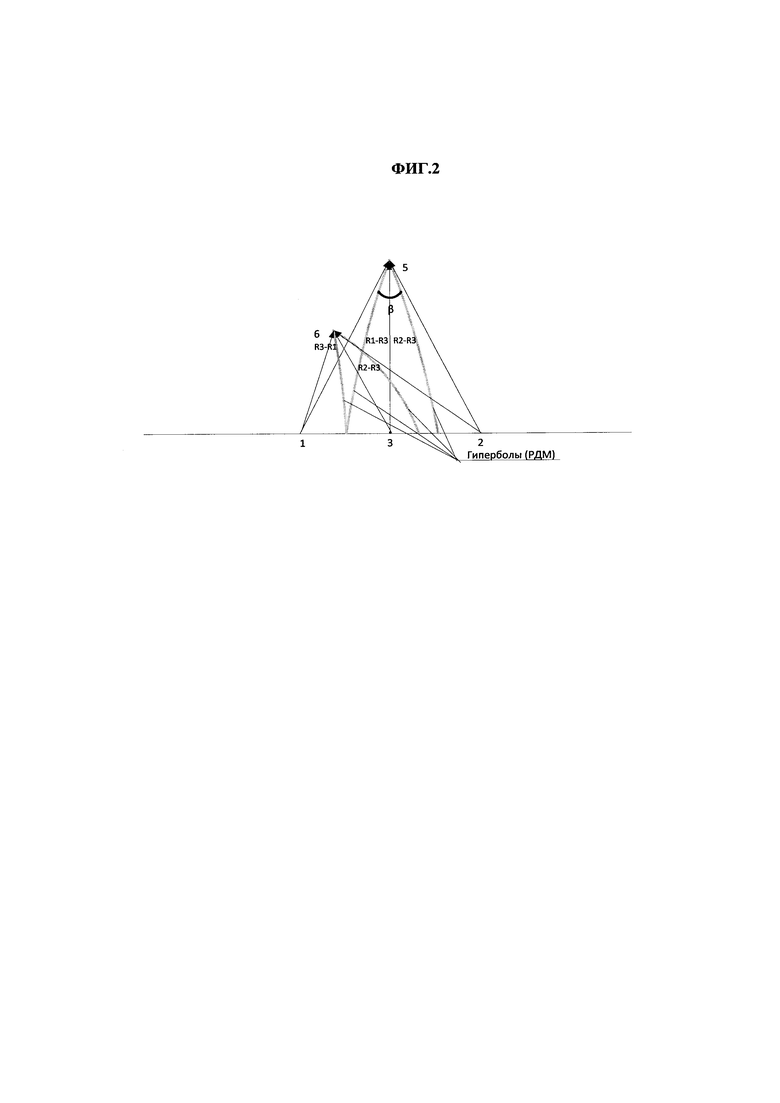
Линии положения в разностно-дальномерном методе приведены на ФИГ. 2.
Разностно-дальномерный метод требует наличия двух пар опорных станций 1, 3 и 3, 2. Одна из станций обычно общая - 3. Каждая пара станций используется для получения линий положения в виде гипербол с фокусами в местах расположения опорных станций 1, 2, 3 как показано на ФИГ. 2. Эти гиперболы - геометрические места точек с постоянной разностью расстояний, определяемых временем запаздывания сигналов от разных РОС.
R1 - расстояние от 1 до 5, 6
R2 - расстояние от 2 до 5, 6
R3 - расстояние от 3 до 5, 6
Гиперболы определяются равенствами: R1 - R3=const; R3 - R1=const; R2 - R3=const; где const - изменяемый параметр.
Точки пересечения гипербол совпадают с местами нахождения 5, 6.
Для обеспечения работы системы в беззапросном режиме необходима точная синхронизация опорных станций.
Расчет инструментальной ошибки измерения разности расстояний и позиционирования в системе.
1. Инструментальная ошибка измерения разности расстояний при дискретизации входного сигнала в аналого-цифровом преобразователе (АЦП)
Навигационный сигнал представляет собой шумоподобный сигнал с базой В, то есть псевдослучайную последовательность (ПСП) из В символов.
Разные РОС излучают навигационные сигналы, которые принимаются AT. Так как скорость распространения радиоволн в воздухе постоянна, то принятые в AT сигналы от пары POCi и POCj проходят разные расстояния Ri и Rj до AT, при этом измеряется разница в задержках прихода сигнала Δtз:

где (Ri - Rj) - разность расстояний от AT до POCi и POCj (м);
с=299796459,2±1,1 м/с - скорость света в вакууме (скорость распространения радиоволн).
Так как инструментальная точность позиционирования в ЛСН определяется точностью измерения времени задержки сигнала, зависящей от ошибки дискретизации входного сигнала в приемнике во времени, то предлагается следующий оценочный расчет
(оценочный расчет приведен с численными вычислениями для лучшего восприятия, естественно, значения могут быть другими):

где Δинстр. - инструментальной ошибки определения разности расстояний в паре (Ri - Rj) при дискретизации входного сигнала в аналого-цифровом преобразователе (АЦП) приемника в AT с точностью до одного символа ПСП;
fсимв.=1 МГц - частота следования символов ПСП;
Nотсч.=1 количество отсчетов выходного сигнала АЦП на каждый из символов ПСП.
2. Частота дискретизации входного сигнала.
Частота дискретизации входного сигнала в АЦП выбирается из расчета К1=20 отсчетов на один символ ПСП.
Таким образом, инструментальная ошибка измерения разности расстояний при дискретизации входного сигнала в АЦП приемника на частоте К1*fсимв. в разностно-дальномерном методе:

3. Повышение частоты дискретизации входного сигнала.
Для уменьшения инструментальной ошибки выполняется повышение частоты дискретизации входного сигнала в К2 раз без повышения частоты работы АЦП.
Для этого, берется К2=10 отсчетов на каждый символ, следующий с частотой дискретизации К1*fсимв…, путем сдвига тактирующего сигнала на 1/10 такта на каждой из К2 посылок ПСП.
При обработке К2=10 посылок ПСП инструментальная ошибка измерения разности расстояний в разностио-дальномерном методе равна:

4. Точное определение положения пика функции корреляции.
Функция корреляции (ФК) в приемнике абонента вычисляется с использованием статистики полученных отсчетов.
График отсчетов ФК в районе пика выглядит как треугольник с основанием К1=20 отсчетов по оси времени, как показано на ФИГ. 3.
При этом пик ФК представлен не одним отсчетом, а «растянут» на К1 тактов.
Отсчеты ФК, следуют частотой K1*fсимв. и обозначены точками, которые не лежат на одной прямой из-за ошибок распространения и обработки навигационного сигнала.
Положение пика ФК вычисляется как точка пересечение двух прямых, составляющих треугольник и проведенных оптимально среди 10 отсчетов (слева)+10 отсчетов (справа) с использованием метода наименьших квадратов. При этом получим точку tи, которая определяет более точное положение пика ФК и будет отличаться на величину Δtфк от значения tи' полученного в случае, когда ФК вычисляется с точностью до отсчета с инструментальной ошибкой измерения разности расстояний Δрдт=1,5 м.
Определение точного значения сигнала и момента пика ФК начинается при превышении сигналом на выходе согласованного фильтра некоторого порога.
При этом с использованием метода наименьших квадратов инструментальная ошибка измерения разности расстояний (δрд) уменьшается в К3 раз и представляет собой среднеквадратичное отклонение (СКО) с учетом ошибки распространения и обработки навигационного сигнала.
По имеющимся данным статистики К3=2-3:
Для К1=20, К2=10, К3=3

5. Увеличение числа измерений разности расстояний.
Согласно закону теории погрешностей, если необходимо повысить точность результата (при исключенной систематической погрешности) необходимо увеличить число измерений.
Если увеличить число измерений L1 при измерении разности расстояний в 25 раз, то есть обрабатывать кадр из 25 ПСП, то СКО будет меньше в √L1=5 раз. Кроме того, кадр из 25 ПСП необходим, так как в нем содержится адрес абонента и опорной станции, а также, другая необходимая информация.
При этом получаем инструментальную ошибку СКО (δрд) при использовании метода наименьших квадратов при измерении разности расстояний:
Для К1=20, К2=10, К3=3, √L1=5

(при доверительной вероятности 0,67).
6. Учет ошибки синхронизации опорных станций
При использовании разностно-дальномерного метода к значению инструментальной ошибки определения разности расстояний (δрд=0,1 м) необходимо прибавить инструментальную ошибку синхронизации опорных станций, равную δд=0,05, как будет показано ниже (13) при описании процесса синхронизации опорных станций.
При этом получим с учетом ошибки синхронизации опорных станций:

При коэффициенте корреляции Ry=+1 суммарная δΣ переходит в формулу алгебраического суммирования:

Полученные значения инструментальной ошибки определения разности расстояний (δрдс=0,15 м) составляют лишь часть реальной ошибки.
Реальная ошибка может быть определена только при измерении на имитаторе сигнала и проведении натурных испытаний.
7. Влияние геометрического фактора на точность позиционирования в системе
В разностно-дальномерном методе измеряемым параметром является разность расстояний от AT (точка И) до двух пар опорных станций (А-0 и О-В). Ошибка позиционирования СКО (δп) по трем опорным станциям, расположенным в точках А, О, В (ФИГ. 2), имеющим ошибки измерения линий положения ЛП-1 и ЛП-2 до абонента δа=δв, будет:

где n=2 - количество ЛП.
Геометрический фактор (Dilution of Precision) DOP=1/sin β (β - угол между векторами DA и DB, направленными от абонента И1 к опорными станциям А и В, как показано на ФИГ. 2.
Абонент находится в точке И пересечения двух линий положения ЛП-1 и ЛП-2.
Геометрический фактор DOP в зависимости от угла β приведен в Таблице 1.
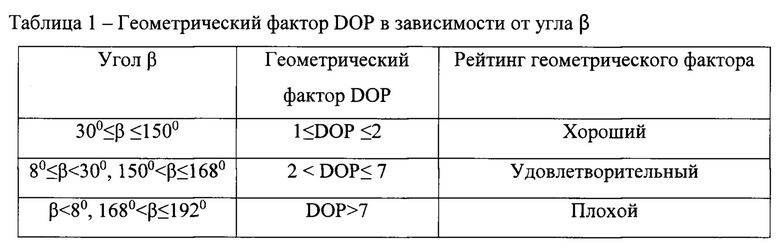
В разностно-дальномерном методе при СКО измерения разности расстояний δрдс=0,15 м с учетом ошибки синхронизации опорных станций, получаем СКО (δпрд) позиционирования (при β=30°, DOP=1/sin β=2,0, n=2, δа=δв):

При идеальном геометрическом факторе DOP=1 (угол β=90°) получим δпрд=0,15 м.
Всего в кадре содержатся 25 ПСП, длительность кадра составляет 25 мсек.
При этом частота выдачи результата - 10 Гц
8. Увеличение числа измерений при позиционировании.
Если увеличить число измерений L2 при позиционировании в ЛСН в 16 раз, то есть обрабатывать 16 кадров по 25 ПСП, то согласно закону теории погрешностей СКО будет меньше в √L2=4 раза:

При идеальном геометрическом факторе DOP=1 (угол β=90°) получим δпрд=0,037 м.
Длительность 16 кадров по 25 ПСП - 400 мсек.
При этом частота выдачи результата - 1 Гц.
9. Результаты расчета инструментальных ошибок определения координат в зависимости от геометрического фактора и частоты выдачи результата приведены в Таблице 2.
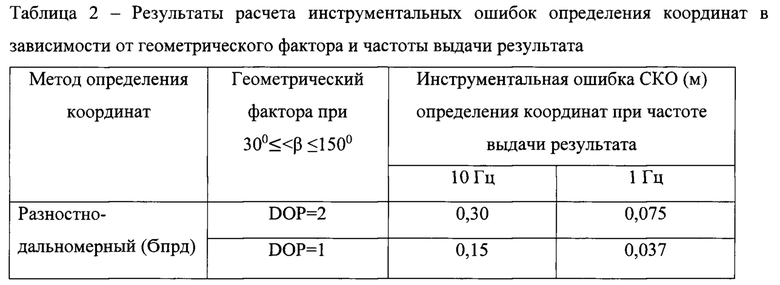
Расчеты инструментальной ошибки позиционирования показали возможность достижения сантиметровой точности (СКО) разностно-дальномерной радионавигационной системы при различных геометрических факторах.
Устойчивость к маскирующим помехам обеспечивается тем, что:
- в системе используется шумоподобные сигналы, уровень которых превышает уровень сигналов ГНСС на входе приемника в 10000 раз и для которых подавление помехи на выходе согласованного фильтра по мощности составляет 2 В раз, где В=1024-база сигнала;
- решение задачи в навигационном приемнике принимается не по фазе несущей, подверженной воздействию помех, а по высокоточному измерению разности расстояний и точной синхронизации на основе кода сигнала, устойчивого к воздействию помех, что обеспечивается согласованной фильтрацией сигнала с точным определением момента пика функции корреляции.
Устойчивость к имитационным помехам обеспечивается тем, что:
- устойчивость к генерируемым имитационным помехам (100%) обеспечивается использованием большого количества ПСП (более 1000 ПСП), динамически меняющихся по определенному сложному закону под управлением АПК;
- устойчивость к ретранслированным имитационным помехам обеспечивается тем, что они подобны переотраженным сигналам и устраняются методами борьбы с переотражениями.
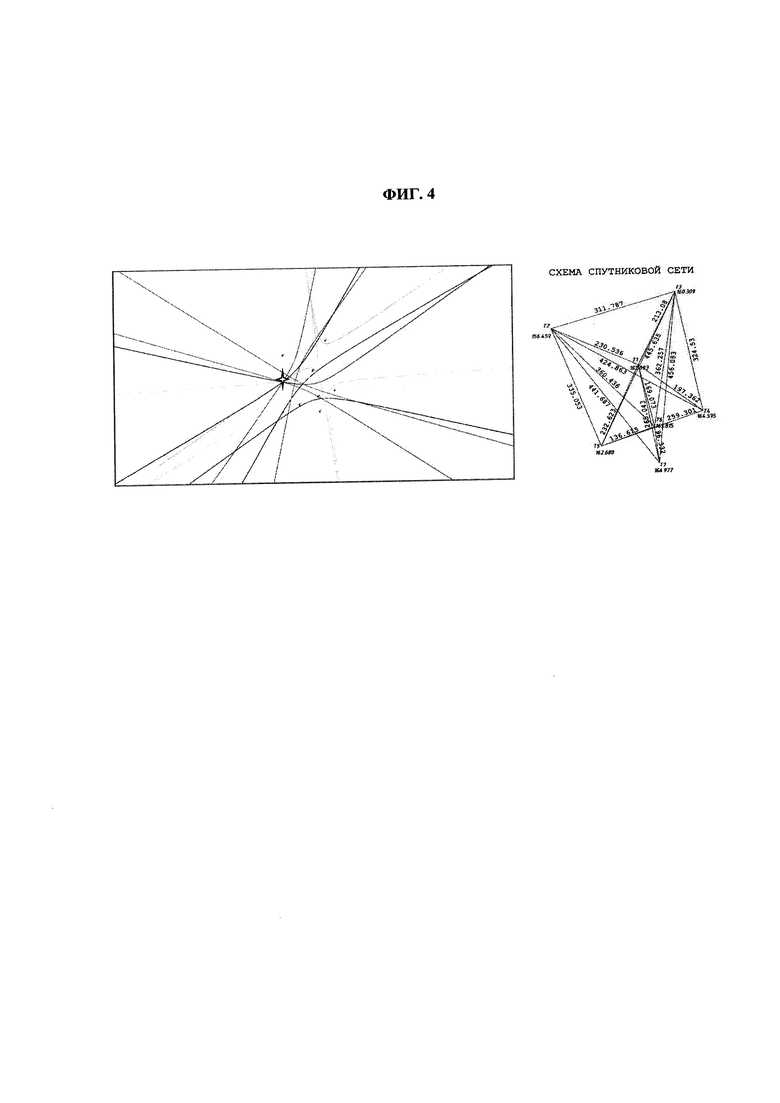
Рабочая зона ЛСН (гиперболы) на испытательном полигоне в разностно-дальномерном методе (моделирование) представлена на ФИГ. 4.
Фокусы гипербол, находящиеся в местах расположения опорных станций, показаны точками.
Семь РОС находятся в точках Т1-Т7. Гиперболы от сигналов, включенных в систему опорных станций, пересекаются в одной точке. Абонент находится в этой точке пересечения множества гипербол. Решение навигационной задачи - нахождение этой точки.
Переотраженные сигналы не входят в решение навигационной задачи, так как не попадают в точки пересечения гипербол, в фокусах которых расположены опорные станции с известными координатами.
Таким образом борьба с влиянием имитационных ретранслированных помех производится такими же методами, как борьба с переотраженными сигналами.
Точная синхронизация сети РОС необходима при реализации беззапросного режима (разностно-дальномерного метода) позиционирования.
Для синхронизации РОС предлагается использовать дальномерный метод, как при позиционировании AT в запросном режиме.
Синхронизация сети РОС выполняется с использованием дальномерного метода измерения разности расстояний между ведущей РОС 4 и ведомыми РОС 1, РОС 2, РОС 3, как было показано на ФИГ. 1.
Достоинство метода - для синхронизации сети РОС используется помехоустойчивый защищенный шумоподобный синхросигнал.
Каждая ведомая РОС в запросном режиме (дальномерном методе) посылает сигнал, содержащий 25 ПСП, принимаемый ведущей РОС, которая излучает ответный сигнал, синхронизированный с сигналом эталонного генератора ведущей РОС. Расчет производится аналогично расчету ошибки измерения псевдодальности с учетом того, что расстояние между РОС с помощью геодезического приемника ГНСС измерено с точностью до сантиметра. Синхросигнал на генераторе каждой ведомой РОС, находящейся в сети, должен быть подстроен так, чтобы полученная псевдодальность была равна известному точному расстоянию до ведущей РОС.
При этом получаем инструментальную ошибку (СКО) вычисления псевдодальности между опорными станциями в дальномерном методе δд м, в два раза меньшую δрд (6), так как СКО в дальномерном методе делится на 2 из-за измерения двойного расстояния от РОС ведомой до РОС ведущей и обратно.
При этом получаем инструментальную ошибку СКО (δд) при использовании метода наименьших квадратов при измерении псевдодальности в дальномерном методе:
Для К1=20, К2=10, К3=3, √L1=5:

(при доверительной вероятности 0,67).
Эта ошибка пересчитывается в ошибку синхронизации во времени:

С такой оценкой инструментальной погрешности будет обеспечена синхронизация сети РОС.
Процедура синхронизации должна периодически повторяться. Период повторения определяется нестабильностью генераторов, используемых на РОС.
В качестве примера, в представленной ЛСН в составе РОС используется генератор с кратковременной нестабильностью частоты Δf/f=2*10-11 за 1 секунду.
Нестабильность (ошибка) синхронизации по времени:

Если допустимая ошибка синхронизации δat доп=1 нс, то Δt/t=δat доп/t=Δf/f. Отсюда интервал времени, в котором ошибка синхронизации не превышает 1 нс:

То есть, процедура синхронизации должна повторяться каждые 50 сек (0,8 мин).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигации с использованием абонентского терминала и абонентский терминал | 2023 |
|
RU2837647C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Способ, реализующий точную помехоустойчивую синхронизацию опорных станций локальной навигационной системы | 2023 |
|
RU2827095C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Способ навигации с использованием радионавигационных опорных станций и опорная станция для его осуществления | 2023 |
|
RU2837598C1 |
| Помехоустойчивая дальномерная локальная радионавигационная система, обеспечивающая высокоточное позиционирование | 2022 |
|
RU2784802C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| Способ определения местоположения объекта навигации | 2024 |
|
RU2824861C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |

Изобретение относится к области радионавигации и позволяет осуществить реализацию помехоустойчивой разностно-дальномерной радионавигационной системы. Техническим результатом является обеспечение высокоточного позиционирования абонентов и синхронизации радионавигационных опорных станций в беззапросном режиме с использованием разностно-дальномерного метода позиционирования при практически неограниченном количестве пользователей системы и высокоточного способа корреляционной обработки шумоподобных сигналов, обеспечивающего сантиметровую точность позиционирования и высокую устойчивость к маскирующим и имитационным помехам. Разностно-дальномерная локальная радионавигационная система представляет собой локальную систему навигации, состоящую из сети приемопередатчиков радионавигационных опорных станций (РОС), приемопередатчиков абонентских терминалов (АТ) и аппаратно-программного комплекса (АПК). Система реализует разностно-дальномерный метод позиционирования, при котором абонентские терминалы принимают навигационные сигналы опорных станций и по разности времени прихода сигналов от нескольких опорных станций определяют свои координаты, направление движения и скорость. Кроме того, в системе навигационные данные от абонентских терминалов передаются на АПК, на котором осуществляется сбор данных мониторинга и управление работой радионавигационной системы посредством управления сменой псевдослучайных последовательностей (ПСП) в РОС и АТ. Заявленная система содержит по меньшей мере три радионавигационные опорные станции и выполнена с возможностью работы в беззапросном режиме посредством их синхронизации, а период повторения процедуры синхронизации определяется нестабильностью генераторов, используемых на РОС. При этом в системе используются методы борьбы с переотраженными сигналами посредством использования помехоустойчивого способа корреляционной обработки кода шумоподобного навигационного сигнала в приемопередатчике абонентского терминала и использования шумоподобных навигационных сигналов, мощность которых в точке приема превышает мощность сигнала глобальных навигационных спутниковых систем. 4 ил., 2 табл.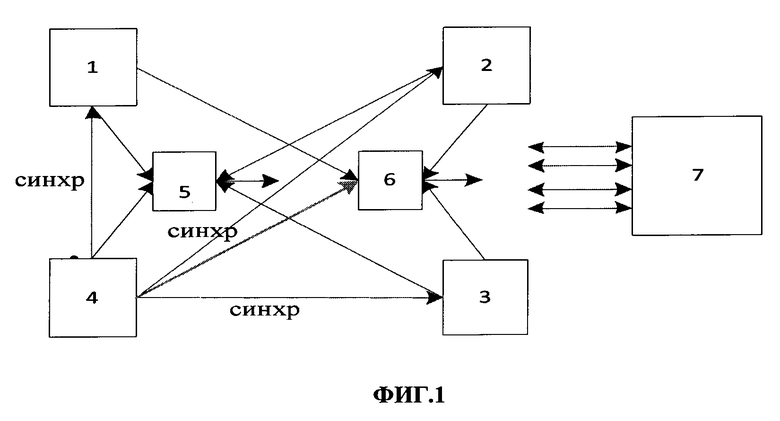
Разностно-дальномерная локальная радионавигационная система, использующая беззапросный режим и разностно-дальномерный метод позиционирования, отличающаяся тем, что она представляет собой локальную систему навигации, состоящую из сети приемопередатчиков радионавигационных опорных станций (РОС), приемопередатчиков абонентских терминалов (АТ) и аппаратно-программного комплекса (АПК), при этом радионавигационная система выполнена с возможностью решения как навигационной задачи позиционирования посредством разностно-дальномерного метода позиционирования, при котором абонентские терминалы принимают навигационные сигналы РОС и по разности времени прихода сигналов от нескольких РОС определяют свои координаты, направление движения и скорость, так и задачи мониторинга, при которой навигационные данные от абонентских терминалов передаются на АПК, предназначенный для сбора данных мониторинга и управления работой радионавигационной системы посредством управления сменой псевдослучайных последовательностей (ПСП) навигационных сигналов в РОС и АТ по определенному закону, причем радионавигационная система содержит по меньшей мере три радионавигационные опорные станции и выполнена с возможностью работы в беззапросном режиме посредством их синхронизации, в процессе которой одна из РОС, являющаяся ведущей, выдает на все остальные ведомые РОС сети сигнал синхронизации, в качестве которого используется шумоподобный навигационный сигнал, представляющий собой сигнал с базой В в виде динамически меняющихся ПСП из В символов, а период повторения процедуры синхронизации определяется нестабильностью генераторов, используемых на РОС, при этом радионавигационная система выполнена с возможностью использования методов борьбы с переотраженными сигналами, использования помехоустойчивого способа корреляционной обработки кода шумоподобного навигационного сигнала в приемопередатчике абонентского терминала посредством согласованной фильтрации шумоподобного навигационного сигнала с определением момента пика функции корреляции и использования шумоподобных навигационных сигналов, мощность которых в точке приема в 10000 раз превышает мощность сигнала глобальных навигационных спутниковых систем и для которых подавление помехи на выходе согласованного фильтра по мощности составляет 2В раз.
| НАВИГАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2555860C2 |
| РАДИОНАВИГАЦИОННАЯ МНОГОПОЗИЦИОННАЯ РАЗНОСТНО-ДАЛЬНОМЕРНАЯ СИСТЕМА | 2020 |
|
RU2746218C1 |
| ФАЗОРАЗНОСТНАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА С ШИРОКОПОЛОСНЫМ СИГНАЛОМ | 2015 |
|
RU2602506C1 |
| Способ локальной радионавигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2770127C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
| Способ пространственной селекции расстояний при решении задачи позиционирования мобильного средства дальномерным методом в наземной локальной радионавигационной системе | 2017 |
|
RU2644762C1 |
| БАЖЕНОВ А.В., ЗАХАРЕНКО Г.И., БЕРЕЖНОВ А.Н., САВЧЕНКО К.Ю | |||
| Радионавигационные системы / Учебное пособие | |||
| Под ред | |||
| А.В | |||
| Баженова - Ставрополь: СВВАИУ(ВИ), 2007 | |||
| Приспособление к тростильной машине для прекращения намотки шпули | 1923 |
|
SU202A1 |
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
