Изобретение относится к медицинской технике, а более конкретно - к технологиям анализа медицинских изображений. В частности, заявляемое изобретение относится к системе и способу для автоматического планирования двухмерных видов в объемных медицинских изображениях.
На практике врачам зачастую необходим двумерный снимок области интереса для того, чтобы поставить диагноз. Существующие устройства для медицинской визуализации, такие как магнитно-резонансный томограф (МРТ), компьютерный томограф (КТ) и другие, могут формировать трехмерные объемные изображения. Следовательно, необходимо найти двумерные виды внутри этих объемов, пригодные для постановки диагноза врачом. На сегодняшний день эта процедура поиска производится врачами вручную. В зависимости от области интереса и применяемого устройства данная операция может занимать до 20 минут (например, МРТ сердца). Кроме больших временных затрат, для данной процедуры характерно то, что она должна производиться высококвалифицированным медицинским персоналом, но даже в этом случае снимки одного и того же органа, сделанные двумя врачами, могут отличаться. Это может осложнить сравнение снимков одного пациента, сделанных в разное время.
Для решения обозначенных проблем требуется способ автоматического планирования двумерных снимков в объемных изображениях. Несколько подходов к решению этой проблемы появилось в последние годы. Они могут быть классифицированы по типу медицинского сканера (томографа) (МРТ, КТ), сканируемой части тела (мозг, сердце, позвоночник, колено и плечо), типу алгоритма (основанные на анатомических точках, основанные на сегментации, основанные на атласе и гибридные).
Алгоритмы, основанные на анатомических точках, используют анатомические точки как ориентиры для построения желаемых видов. В этом случае задача построения видов сводится к задаче поиска этих анатомических точек. Алгоритмы, основанные на сегментации, производят сегментацию анатомических структур, а затем строят плоскости на основе этой сегментации. Алгоритмы, основанные на атласе, производят регистрацию входного изображения в соответствии с некоторым атласом, для которого желаемые плоскости видов известны. Гибридные алгоритмы используют комбинацию двух или более подходов.
Патентная заявка США 2011/0206260 [1] описывает способ автоматического пошагового планирования МРТ снимков, предусматривающий получение первого обзорного изображения с первым полем зрения, первым пространственным разрешением, нахождение первоначальной области интереса и, как минимум, одной анатомической точки в первом обзорном изображении, определение позиции и ориентации первого региона, который используется для планирования второго обзорного изображения, получение второго обзорного изображения со вторым полем зрения, имеющего новое пространственное разрешение, причем новое пространственное разрешение превышает первое, планирование геометрии для анатомической области интереса с использованием второго обзорного изображения, получение диагностического снимка анатомической области интереса с использованием спланированной геометрии. Основным недостатком данного способа является необходимость осуществления нескольких снимков, что может занять много времени.
Патент США 7711160 [2] описывает способ, систему и устройство определения оптимальных плоскостей видов для получения снимков сердца, где способ предусматривает получение множества таких сагиттальных, аксиальных и корональных изображений сердца, что аксиальное и корональное изображение пересекает сагиттальное изображение ортогонально, а собственно изображение сердца содержит естественную ось, левый желудочек с кровяным депо, границу кровяного депо и вершину. Способ также включает создание карты границ кровяного депо и использование карты для создания оси координат, связанной с естественной осью. Основным недостатком данного способа является необходимость априорного знания о расположении сердца для получения трех ортогональных снимков. Также способ основывается на алгоритмах определения границ, которые могут некачественно работать для быстро снятых изображений низкого качества и с низким соотношением сигнал/шум.
Патентная заявка США 2012/0070074 [3] описывает устройство и способ для обучения детектора анатомических точек, который получает обучающие данные, включающие множество положительных обучающих наборов, каждый из которых включает множество положительно аннотированных примеров, и множество негативных обучающих наборов, каждый из которых включает, как минимум, один негативно аннотированный образец. Функция классификации инициализируется путем обучения первого слабого классификатора на основе позитивных обучающих наборов и негативных обучающих наборов. Все обучающие примеры обрабатываются функцией классификации. Для каждого из множества остальных классификаторов вычисляется градиент значения функции потерь на основе пространственной контекстной информации для каждого примера, классифицированного в качестве позитивного функцией классификации.
Значение градиента, ассоциированное с каждым из оставшихся слабых классификаторов, вычисляется на основании градиентов функций потерь. Далее выбирается слабый классификатор, имеющий наименьшее значение ассоциированного градиента и заданного взвешивающего параметра, и данный классификатор добавляется в функцию классификации. Основным недостатком данного алгоритма является использование пространственной контекстной информации только локально, путем включения регуляризации полной вариации в функцию потерь. Использование глобальных относительных положений анатомических точек могло бы улучшить качество обнаружения анатомических точек.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении эффективности автоматического планирования двухмерных видов в объемных медицинских изображениях за счет оптимального применения статистической модели как в процессе обучения детектора анатомических точек, так и в процессе построения видов на основе найденных точек.
Технический результат достигается за счет разработки усовершенствованного способа автоматического планирования видов в объемных медицинских изображениях, предусматривающего выполнение следующих операций: оценивают статистическую модель положений анатомических точек, проводят обучение детектора анатомических точек, получают объемное изображение области интереса, производят обнаружение множества кандидатов анатомических точек, выполняют поиск наилучшей конфигурации анатомических точек среди кандидатов, осуществляют построение плоскостей видов на основе найденной конфигурации анатомических точек, при этом способ отличается тем, что:
- вышеназванное оценивание параметров указанной статистической модели осуществляется с использованием аннотированного множества объемных изображений;
- вышеназванное обучение детектора анатомических точек производится с использованием энергии указанной статистической модели, как части функции потерь;
- вышеназванное обнаружение множества кандидатов анатомических точек осуществляется детектором анатомических точек, обученным с использованием указанного выше алгоритма;
- вышеназванный поиск наилучшей конфигурации анатомических точек производится с помощью жадного итеративного поиска конфигурации, минимизирующей указанную энергию статистической модели.
Заявляемый способ предпочтительно реализуется с помощью заявляемой системы для автоматического планирования видов в объемных медицинских изображениях, включающей в себя устройство получения объемных медицинских изображений, отличающейся тем, что дополнительно содержит:
- детектор анатомических точек, параметры которого вычисляются путем минимизации функции потерь, определенной как:

где Y представляет собой множество меток, соответствующих каждой области объема, заданных своими координатами x∈X; Q является множеством выходов детектора анатомических точек для каждой области объема, при этом выходы детектора анатомических точек поступают на вход блока уточнения позиций анатомических точек;
- блок уточнения позиций анатомических точек, выполненный с возможностью реализации алгоритма поиска наилучшей конфигурации анатомических точек согласно заявленному способу, при этом выходы блока уточнения позиций анатомических точек поступают на вход блока вычисления параметров плоскостей видов;
- блок вычисления параметров плоскостей видов, выполненный с возможностью реализации алгоритма преобразования координат в параметры целевых видов.
Заявляемое изобретение относится к категории способов и систем, основанных на обнаружении анатомических точек. Это означает, что планирование требуемых видов осуществляется за счет вычисления координат плоскости, проходящей через заранее заданный набор анатомических точек. Большинство современных подходов используют детекторы анатомических точек, полученные путем обучения на некоторой обучающей базе данных, состоящей из входных изображений и вручную аннотированных анатомических точек, соответствующих определенной области интереса. Такие детекторы дают большое количество ложных срабатываний, особенно при обработке изображений низкого качества. Одной из причин, по которым такие ложные срабатывания происходят, является обучающая выборка, состоящая только из позитивных и негативных примеров. Однако в реальных изображениях редко можно определить одну единственную позицию для анатомической точки. Следовательно, в процессе обучения ложное срабатывание детектора в точке, близкой к истинному положению анатомической точки, должно штрафоваться меньше, чем ложное срабатывание в точке, располагающейся далеко от истинного положения. Некоторые подходы, описанные выше, решают эту проблему лишь частично, добавляя условие гладкости в функцию потерь. Но такие подходы не принимают во внимание глобальную взаимосвязь между анатомическими точками.
Еще одна тенденция, проявляющаяся в известных из уровня техники решениях, заключается в построении для заданной области интереса статистической модели, включающей некоторые параметры, которые оцениваются на основе данных (такие, как математическое ожидание и среднеквадратическое отклонение позиций анатомических точек). Далее эта модель используется для оценки положений анатомических точек либо самостоятельно, либо совместно с некоторым слабым классификатором изображений, выходы которого включаются в модель. Такие подходы могут показать хорошую эффективность при обработке данных с малым количеством нестандартных случаев, т.к. они стремятся к формированию усредненных решений и не сильно полагаются на слабые классификаторы.
В некоторых подходах делается попытка преодолеть описанную проблему путем построения более сложных вероятностных моделей, которые, однако, требуют применения вычислительно сложной процедуры вывода.
Заявляемое изобретение имеет следующие отличия от существующих способов и систем автоматического планирования видов:
• изобретение использует детектор анатомических точек для обнаружения множества кандидатов анатомических точек и статистическую модель для поиска наилучшей конфигурации на основе этих кандидатов, которая в свою очередь используется для построения плоскостей желаемых видов;
• параметры указанной статистической модели оцениваются из обучающей выборки, которая используется для обучения детектора анатомических точек;
• указанная статистическая модель включается в функцию потерь, используемую при обучении детектора анатомических точек, что обеспечивает повышение качества обнаружения;
• на последнем шаге используется быстрый жадный алгоритм поиска локального минимума нелинейной функции потерь с целью найти наилучшую конфигурацию из множества кандидатов анатомических точек;
• изобретение может быть использовано в совокупности с любым устройством объемной медицинской визуализации, например MPT, КТ и др., а также с произвольными типами обучаемых детекторов анатомических точек.
Далее, сущность заявляемого изобретения поясняется с привлечением графических материалов.
Фиг.1 описывает способ автоматического планирования видов в соответствии с вариантом реализации настоящего изобретения.
Фиг.2 представляет диаграмму потока данных изобретения.
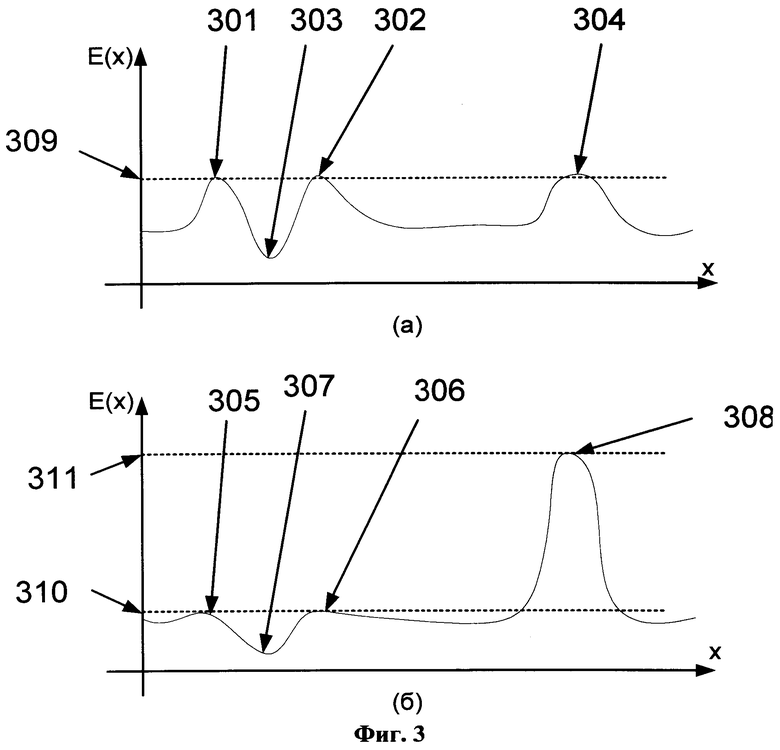
Фиг.3 представляет схематическую иллюстрацию поверхности ошибки в случае общепринятой функции потерь и в случае функции потерь, используемой в данном изобретении.
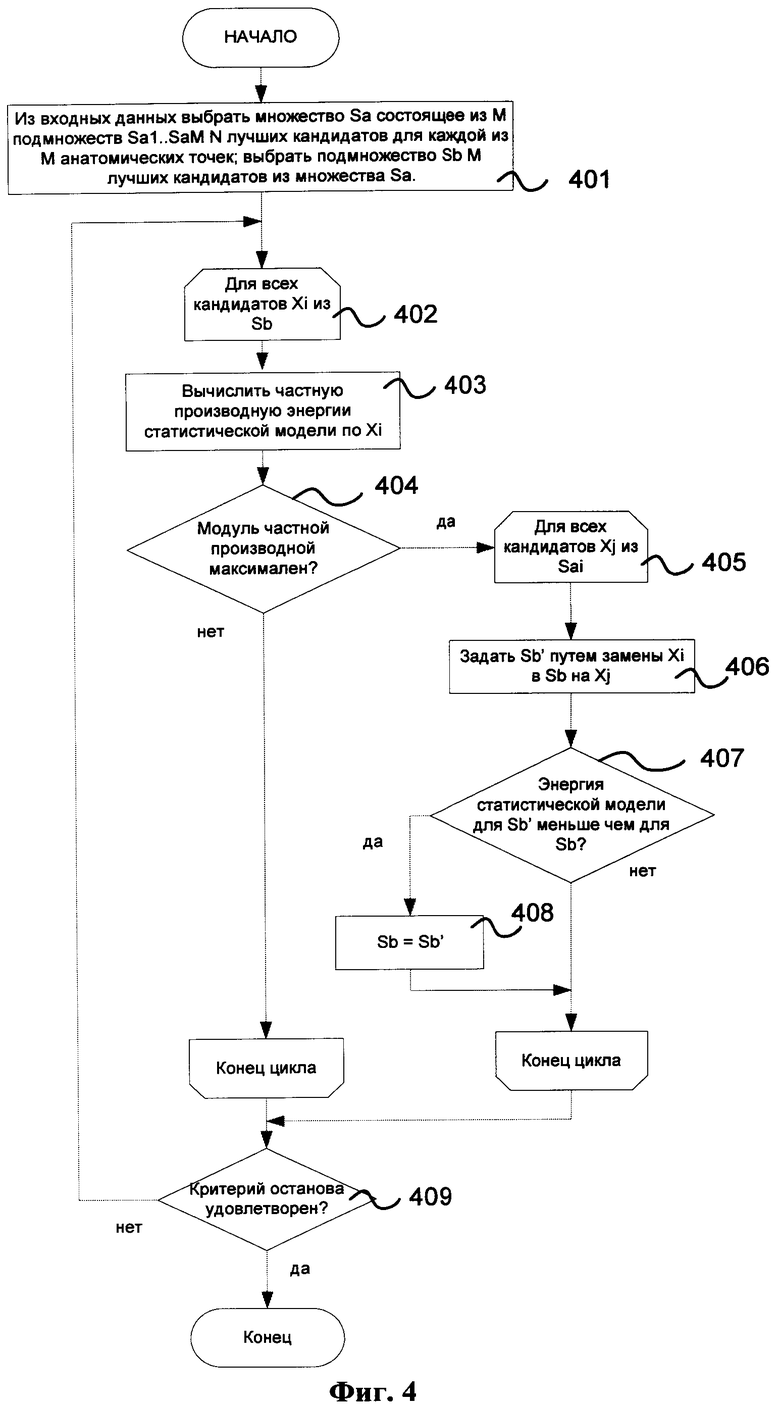
Фиг.4 описывает итерационный жадный алгоритм поиска оптимальной конфигурации анатомических точек.
Изобретение может быть представлено в виде последовательности шагов, необходимых для получения координат плоскостей желаемых видов. На Фиг.1 показана блок-схема, иллюстрирующая работу способа планирования видов. Фиг.2 описывает поток данных, соответствующий блок-схеме на Фиг.1. Способ может быть разделен на две основных части:
• обучение и оценка параметров (шаги 101 и 102) являются предварительными этапами, которые требуется осуществить только один раз для заданного типа процедуры планирования вида;
• обнаружение анатомических точек и планирование видов (шаги 103 - 106). Данные этапы используются для планирования видов каждого нового объемного входного изображения без необходимости повторения шагов 101 и 102.
На первом шаге 101 задается статистическая модель, описывающая положения анатомических точек друг относительно друга, а также оцениваются параметры этой модели. Оценка параметров 202 происходит путем анализа обучающей выборки 201, состоящей из множества входных объемных изображений и аннотаций анатомических точек, соответствующих этим изображениям. Аннотации анатомических точек задаются в виде координат этих точек в объеме. На следующем шаге 102 детектор анатомических точек обучается с помощью обучающего алгоритма 204, использующего обучающую выборку 201 и статистическую модель 203.
На стадии планирования видов объемное изображение 206 формируется устройством 103 визуализации и поступает на вход детектора 207 анатомических точек, который использует параметры 205, полученные с помощью процедуры обучения, для обнаружения (104) кандидатов анатомических точек, и выдает на выходе множество координат анатомических точек и их оценки 208. На основе этого множества анатомических точек и статистической модели производится итеративный жадный поиск (209) локального минимума функции потерь, соответствующего некоторой конфигурации анатомических точек 210. На последнем шаге координаты плоскостей видов 212 вычисляются (211) на основе найденных анатомических точек.
Статистическая модель. В общем случае может использоваться любая статистическая модель, учитывающая пространственные отношения между анатомическими точками. В одном из возможных вариантов реализации заявляемого изобретения может быть использована следующая модель:

где 
В одном из возможных вариантов реализации заявляемого изобретения функция Ψ может быть определена следующим образом:

где xs и xt являются векторами координат в трехмерном пространстве, взятых из конфигурации анатомических точек X; µst - трехэлементный вектор от точки s к точке t; - обратная матрица ковариации трехмерных векторов между точками s и t.
Обучение детектора анатомических точек. Детектором анатомических точек называют алгоритм, принимающий на входе локальную область изображения и выдающего на выходе вектор, обозначающий либо наличие, либо отсутствие в этой области некоторой анатомической точки. В зависимости от конкретной реализации, данный вектор также может кодировать псевдовероятность того, что данная область содержит некоторую анатомическую точку. Обучение детектора анатомических точек представляет собой процесс автоматического поиска параметров упомянутого алгоритма. Общепринятым способом обучения детектора анатомических точек является сбор обучающей выборки и запуск алгоритма оптимизации, минимизирующего некоторую функцию потерь. Обучающая выборка представляет собой множество объемных изображений, для которых координата каждой анатомической точки априори известна. В таком множестве любая произвольная область изображения, находящаяся рядом с анатомической точкой, считается положительным примером, а все остальные области образуют множество отрицательных примеров. Функция потерь вычисляется на основе разницы между желаемым и реальным выходными значениями детектора анатомических точек. Наиболее распространенными функциями потерь являются СКО (среднеквадратическое отклонение) и отрицательный логарифм правдоподобия.
Отрицательный логарифм правдоподобия задается следующим выражением:

где y является бинарной меткой, принимающей значение 1, если входная область изображения содержит анатомическую точку, и 0, если не содержит; q принимает значения в диапазоне от 0 до 1 и представляет собой псевдовероятность, вычисленную детектором, того, что данная область содержит анатомическую точку.
Недостатком использования данной функции потерь при обучении детектора анатомических точек является невозможность учета расстояния от ложно обнаруженной анатомической точки до истинной.
С целью устранения этого недостатка в заявляемом изобретении предлагается использовать модифицированную версию функции потерь:

где Y представляет собой множество меток, соответствующих каждой области объема, заданных своими координатами x∈X; Q является множеством выходов детектора анатомических точек для каждой области объема. Чем меньше множество обнаруженных анатомических точек согласуется со статистической моделью, тем большее значение принимает функция потерь. Фиг.3 демонстрирует график зависимости значения функции потерь от координаты в случае использования выражения 3.1 и в случае использования выражения 3.2. На Фиг.3 минимумы ошибки 303 и 307 соответствуют истинным обнаружениям анатомических точек детектором. Пики 301, 302, 305 и 306 соответствуют ложным обнаружениям, расположенным близко к истинному положению анатомической точки. Пики 304 и 308 соответствуют ложным обнаружениям, расположенным далеко от истинного положения анатомической точки. Из Фиг.3 видно, что в случае использования функции потерь (3) значение ошибки 309 для ложного обнаружения рядом с истинным положением анатомической точки такое же, как и для более далеких ложных обнаружений. В противоположность этому, когда используется функция (4), учитывающая глобальную статистику взаимных положений анатомических точек, значение функции потерь в точке 308, далекой от истинного положения анатомической точки больше, чем ее значение в точке, близкой 310.
Поиск оптимальной конфигурации анатомических точек. Результатом обнаружения анатомических точек в заданной области объема является m-вектор Q=(q1,…,qm), задающий псевдовероятности наличия в этом объеме каждой из m ключевых точек. В процессе обнаружения анатомических точек 104 такая процедура производится для каждой точки из множества P=(p1,…,pn), которое может представлять собой совокупность всех точек объема или же некоторое их подмножество. Таким образом, каждой точке pi ставится в соответствие m-вектор Qi. В простейшем случае искомая конфигурация анатомических точек может быть определена как m точек 
С целью преодоления указанной проблемы в заявляемом изобретении предлагается осуществлять жадный итеративный поиск конфигурации, минимизирующей вышеуказанную энергию статистической модели. На Фиг.4 показаны основные этапы данного способа.
На первом шаге 401 из множества кандидатов анатомических точек выбирается подмножество Sa, состоящее из M подмножеств Sa1..SaM N кандидатов, имеющих наибольшее значение псевдовероятности принадлежности к каждой из M анатомических точек. Также выбирается подмножество Sb из множества Sa, состоящее из M лучших кандидатов - по одному для каждой из анатомических точек. Далее, в цикле 402 по всем кандидатам xi из Sb вычисляется частная производная 
На последнем шаге 106 вычисляются координаты плоскостей видов на основе найденной оптимальной конфигурации анатомических точек.
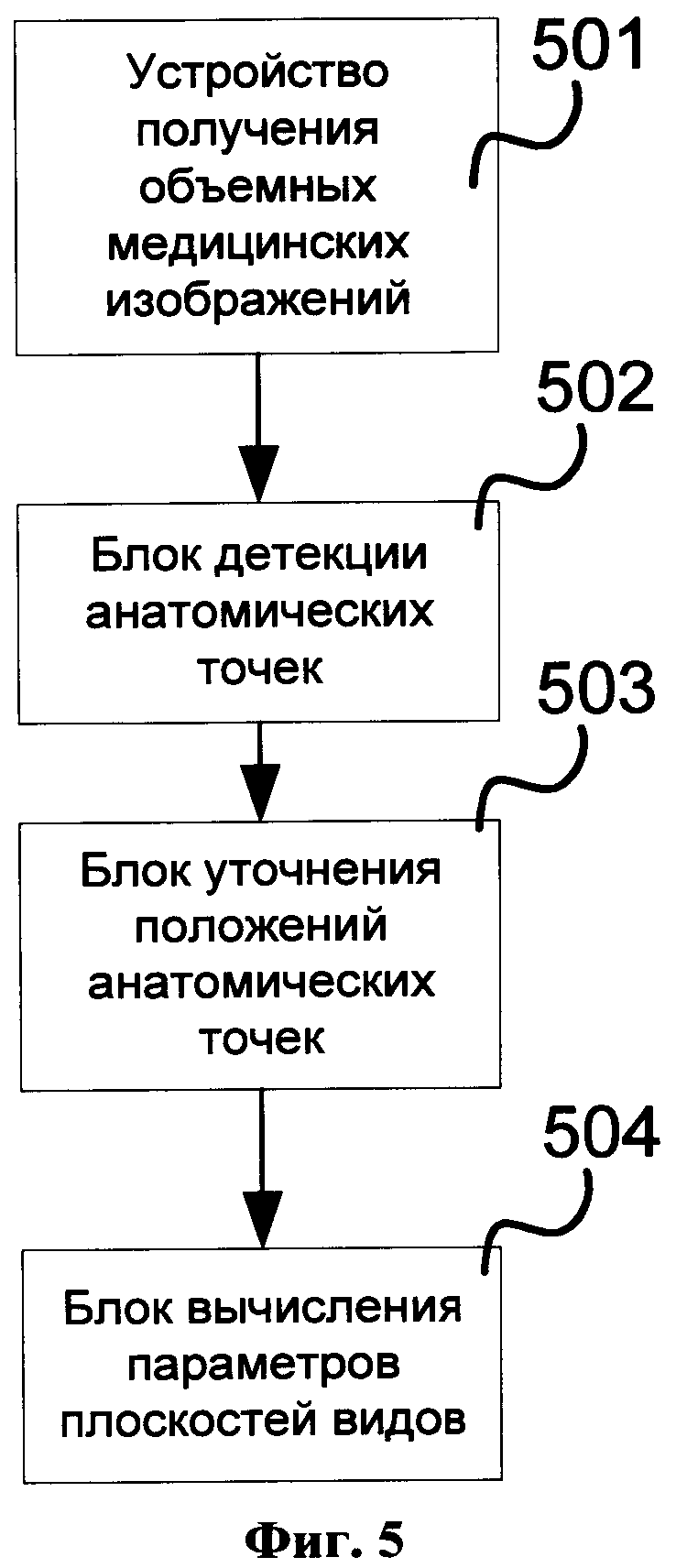
Система для автоматического планирования видов в объемных медицинских изображения. Система для автоматического планирования видов в объемных медицинских изображениях представлена на Фиг.5. Система состоит из устройства получения объемных медицинских снимков 501, в качестве которого могут выступать MPT, КТ или любые другие устройства, способные реконструировать объемные изображения. Изображение с устройства поступает в детектор анатомических точек 502, который реализует алгоритм обнаружения анатомических точек, описанный выше. Упомянутый детектор анатомических точек обучен с использованием подхода, описанного выше. Выходы детектора анатомических точек поступают на вход блока уточнения позиций анатомических точек 503, который реализует алгоритм поиска наилучшей конфигурации анатомических точек, описанный выше. Выходы блока уточнения позиций анатомических точек поступают на вход блока вычисления параметров плоскостей видов 504, который реализует алгоритм преобразования координат в параметры целевых видов.
Заявляемые система и способ применимы в любых устройствах медицинской визуализации, способных получать объемные изображения, таких как MPT, КТ, однофотонные эмиссионные компьютерные томографы, фотоакустические томографы, эластографические устройства и т.п. Кроме того, заявленное изобретение может быть использовано в целях организации и визуализации баз данных медицинских изображений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОЙ РЕГИСТРАЦИИ АНАТОМИЧЕСКИХ ТОЧЕК В ОБЪЕМНЫХ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЯХ | 2013 |
|
RU2530220C1 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ПЛАНИРОВАНИЯ ВИДОВ В ОБЪЕМНЫХ ИЗОБРАЖЕНИЯХ МОЗГА | 2013 |
|
RU2523929C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ДИАГНОСТИКИ ТАЗОБЕДРЕННЫХ СУСТАВОВ | 2022 |
|
RU2795658C1 |
| СИСТЕМА И СПОСОБ ДИАГНОСТИКИ ТАЗОБЕДРЕННЫХ СУСТАВОВ | 2022 |
|
RU2801420C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБУЧАЮЩИХСЯ МОДЕЛЕЙ ПЛАНОВ РАДИОТЕРАПЕВТИЧЕСКОГО ЛЕЧЕНИЯ С ПРОГНОЗИРОВАНИЕМ РАСПРЕДЕЛЕНИЙ ДОЗЫ РАДИОТЕРАПИИ | 2017 |
|
RU2719028C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫЯВЛЕНИЯ ОБЪЕМНЫХ ОБРАЗОВАНИЙ ПОЧЕК НА КОМПЬЮТЕРНЫХ ТОМОГРАММАХ БРЮШНОЙ ПОЛОСТИ | 2024 |
|
RU2839531C1 |
| ПРИСПОСОБЛЕНИЯ И МЕТОДЫ ПЛАНИРОВАНИЯ ОРТОДОНТИЧЕСКОГО ЛЕЧЕНИЯ | 2019 |
|
RU2725280C1 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ПЛАНИРОВАНИЯ ЛЕЧЕНИЯ | 2015 |
|
RU2684173C2 |
| ФОРМИРОВАНИЕ ПСЕВДО-КТ ПО МР-ДАННЫМ С ИСПОЛЬЗОВАНИЕМ РЕГРЕССИОННОЙ МОДЕЛИ НА ОСНОВЕ ПРИЗНАКОВ | 2016 |
|
RU2703344C1 |
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОГО ПОСТРОЕНИЯ КОНТУРОВ В АДАПТИВНОЙ РАДИОТЕРАПИИ | 2015 |
|
RU2689029C2 |

Изобретение относится к технологиям анализа медицинских изображений. Техническим результатом является повышение эффективности автоматического планирования двухмерных видов в объемных медицинских изображениях. Способ включает: оценивают статистическую модель положений анатомических точек, проводят обучение детектора анатомических точек, получают объемное изображение области интереса, обнаруживают множество кандидатов анатомических точек, выполняют поиск наилучшей конфигурации анатомических точек среди кандидатов, осуществляют построение плоскостей видов на основе найденной конфигурации анатомических точек, оценивание параметров указанной статистической модели осуществляют с использованием аннотированного множества объемных изображений; обучение детектора анатомических точек производят с использованием энергии указанной статистической модели, как части функции потерь; обнаружение множества кандидатов анатомических точек осуществляют детектором анатомических точек, обученным с использованием указанного выше алгоритма; поиск наилучшей конфигурации анатомических точек производят с помощью жадного итеративного поиска конфигурации, минимизирующей указанную энергию статистической модели. Система реализует действия способа. 3 н. и 8 з.п. ф-лы, 5 ил.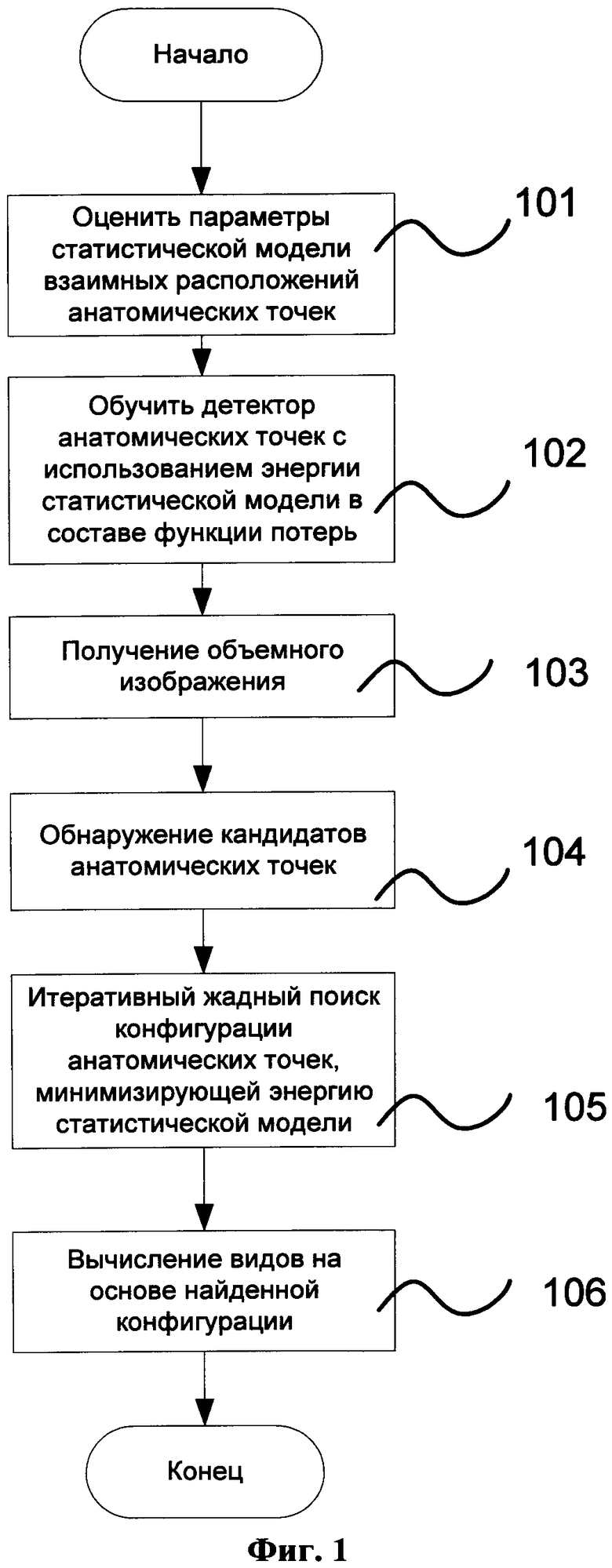
1. Способ автоматического планирования видов в объемных медицинских изображениях, предусматривающий выполнение следующих операций: оценивают статистическую модель положений анатомических точек, проводят обучение детектора анатомических точек, получают объемное изображение области интереса, осуществляют обнаружение множества кандидатов анатомических точек, выполняют поиск наилучшей конфигурации анатомических точек среди кандидатов, осуществляют построение плоскостей видов на основе найденной конфигурации анатомических точек, отличающийся тем, что:
- вышеназванное оценивание параметров указанной статистической модели осуществляют с использованием аннотированного множества объемных изображений;
- вышеназванное обучение детектора анатомических точек производят с использованием энергии указанной статистической модели, как части функции потерь;
- вышеназванное обнаружение множества кандидатов анатомических точек осуществляют детектором анатомических точек, обученным с использованием указанного выше алгоритма;
- вышеназванный поиск наилучшей конфигурации анатомических точек производят с помощью жадного итеративного поиска конфигурации, минимизирующей указанную энергию статистической модели.
2. Способ по п.1, отличающийся тем, что вышеназванную энергию статистической модели определяют следующим образом

где  - это множество M векторов координат анатомических точек, называющееся конфигурацией анатомических точек; Mx - математическое ожидание расстояний анатомических точек друг от друга; Σx - тензор ковариации расстояний между анатомическими точками; E - энергия статистической модели, меньшие значения которой соответствуют конфигурации анатомических точек, лучше согласующейся с моделью; Ψst - функция пространственной энергии, измеряющая статистическую согласованность координат двух анатомических точек.
- это множество M векторов координат анатомических точек, называющееся конфигурацией анатомических точек; Mx - математическое ожидание расстояний анатомических точек друг от друга; Σx - тензор ковариации расстояний между анатомическими точками; E - энергия статистической модели, меньшие значения которой соответствуют конфигурации анатомических точек, лучше согласующейся с моделью; Ψst - функция пространственной энергии, измеряющая статистическую согласованность координат двух анатомических точек.
3. Способ по п.2, отличающийся тем, что вышеуказанную пространственную энергию определяют следующим выражением:

где xs и xt являются векторами координат в трехмерном пространстве, взятых из конфигурации анатомических точек X; µst - трехэлементный вектор от точки s к точке t;  - обратная матрица ковариации трехмерных векторов между точками s и t.
- обратная матрица ковариации трехмерных векторов между точками s и t.
4. Способ по п.1, отличающийся тем, что параметры вышеназванного детектора анатомических точек вычисляют путем минимизации функции потерь, определенной как:
где Y представляет собой множество меток, соответствующих каждой области объема, заданных своими координатами x∈Х; Q является множеством выходов детектора анатомических точек для каждой области объема.
5. Способ по п.1, отличающийся тем, что вышеназванный жадный итеративный поиск конфигурации, минимизирующей вышеуказанную энергию статистической модели, выполняют посредством следующих шагов:
- выбор множества Sa, состоящего из М подмножеств Sai..SaM N лучших кандидатов для каждой из М анатомических точек;
- выбор подмножества Sb M лучших кандидатов из множества Sa;
- вычисление частных производных энергии статистической модели по координатам каждого из элементов Sb;
- поиск элемента xj в Sai, минимизирующего значение энергии статистической модели.
6. Система для автоматического планирования видов в объемных медицинских изображениях, включающая в себя устройство получения объемных медицинских изображений, отличающаяся тем, что дополнительно содержит:
- детектор анатомических точек, параметры которого вычисляются путем минимизации функции потерь, определенной как:
где Y представляет собой множество меток, соответствующих каждой области объема, заданных своими координатами x∈X; Q является множеством выходов детектора анатомических точек для каждой области объема, при этом выходы детектора анатомических точек поступают на вход блока уточнения позиций анатомических точек; Е(X,Mx,Σx) является энергией статистической модели, определяемой согласно заявленному способу;
- блок уточнения позиций анатомических точек, выполненный с возможностью реализации алгоритма поиска наилучшей конфигурации анатомических точек согласно заявленному способу, при этом выходы блока уточнения позиций анатомических точек поступают на вход блока вычисления параметров плоскостей видов;
- блок вычисления параметров плоскостей видов, выполненный с возможностью реализации алгоритма преобразования координат в параметры целевых видов.
7. Носитель информации, содержащий выполняемые компьютером инструкции для автоматического планирования видов в объемных медицинских изображениях; процессор компьютера в процессе выполнения указанных инструкций реализует следующие шаги:
- оценивание параметров статистической модели относительных положений анатомических точек,
- обучение детектора анатомических точек с использованием энергии статистической модели в составе функции потерь,
- получение объемного изображения области интереса,
- обнаружение множества кандидатов анатомических точек детектором анатомических точек,
- нахождение лучшей конфигурации анатомических точек жадным итеративным поиском конфигурации, минимизирующей вышеуказанную энергию статистической модели,
- вычисление координат плоскостей видов на основе найденной конфигурации анатомических точек.
8. Носитель информации по п.7, отличающийся тем, что вышеназванная энергия статистической модели определяется следующим образом

где - это множество M векторов координат анатомических точек, называющееся конфигурацией анатомических точек; Mx - математическое ожидание расстояний анатомических точек друг от друга; Σx - тензор ковариации расстояний между анатомическими точками; E - энергия статистической модели, меньшие значения которой соответствуют конфигурации анатомических точек, лучше согласующейся с моделью; Ψst - функция пространственной энергии, измеряющая статистическую согласованность координат двух анатомических точек.
9. Носитель информации по п.8, отличающийся тем, что вышеуказанная пространственная энергия определяется следующим выражением:
,
где xs и xt являются векторами координат в трехмерном пространстве, взятых из конфигурации анатомических точек X; µst - трехэлементный вектор от точки s к точке t; - обратная матрица ковариации трехмерных векторов между точками s и t.
10. Носитель информации по п.7, отличающийся тем, что параметры вышеназванного детектора анатомических точек вычисляются путем минимизации функции потерь, определенной как:
где Y представляет собой множество меток, соответствующих каждой области объема, заданных своими координатами x∈X; Q является множеством выходов детектора анатомических точек для каждой области объема.
11. Носитель информации по п.7, отличающийся тем, что вышеназванный жадный итеративный поиск конфигурации, минимизирующей вышеуказанную энергию статистической модели, состоит из следующих шагов:
- выбор множества Sa, состоящего из M подмножеств Sa1..SaM N лучших кандидатов для каждой из М анатомических точек,
- выбор подмножества Sb М лучших кандидатов из множества Sa,
- вычисление частных производных энергии статистической модели по координатам каждого из элементов Sb,
- поиск элемента xj в Sai, минимизирующего значение энергии статистической модели.
| US20120070074 A1, 22.03.2012 | |||
| US7711160 B2, 04.05.2010 | |||
| Xiaoguang Lu et al,"Automatic View Planning for Cardiac MRI Aaquisition", G.Fichtinger, A | |||
| Martel, and T | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| RU2011122651 A, 20.12.2012 | |||

