ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[0001] Настоящее раскрытие относится, в общем, к медицинской визуализации и лечению. Более конкретно, настоящее раскрытие относится к системам и способам автоматического построения контуров медицинских изображений в радиотерапевтических процедурах.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] В радиотерапевтических процедурах пациент обычно должен снять серию трехмерных КТ-изображений для планирования и лечения на различных стадиях заболевания. Для генерирования нового плана врачу часто нужно заново наносить контур на изображении, что может занимать много времени, а также не согласовываться с предыдущими контурами/планами. Кроме того, во время лечения формы и местоположения оконтуренных органов обычно отличаются от форм и местоположений на изображении при планировании из-за изменения состояния органов во время лечения. Непосредственное принятие плана не всегда приводит к точной доставке дозы для оптимального лечения. Поэтому очень важно иметь способ автоматического построения контуров для адаптивной коррекции контуров новых сканирований в процессе обработки. Это могло бы не только уменьшить время определения контуров для врачей, но также улучшить точность и постоянство доставки лечения.
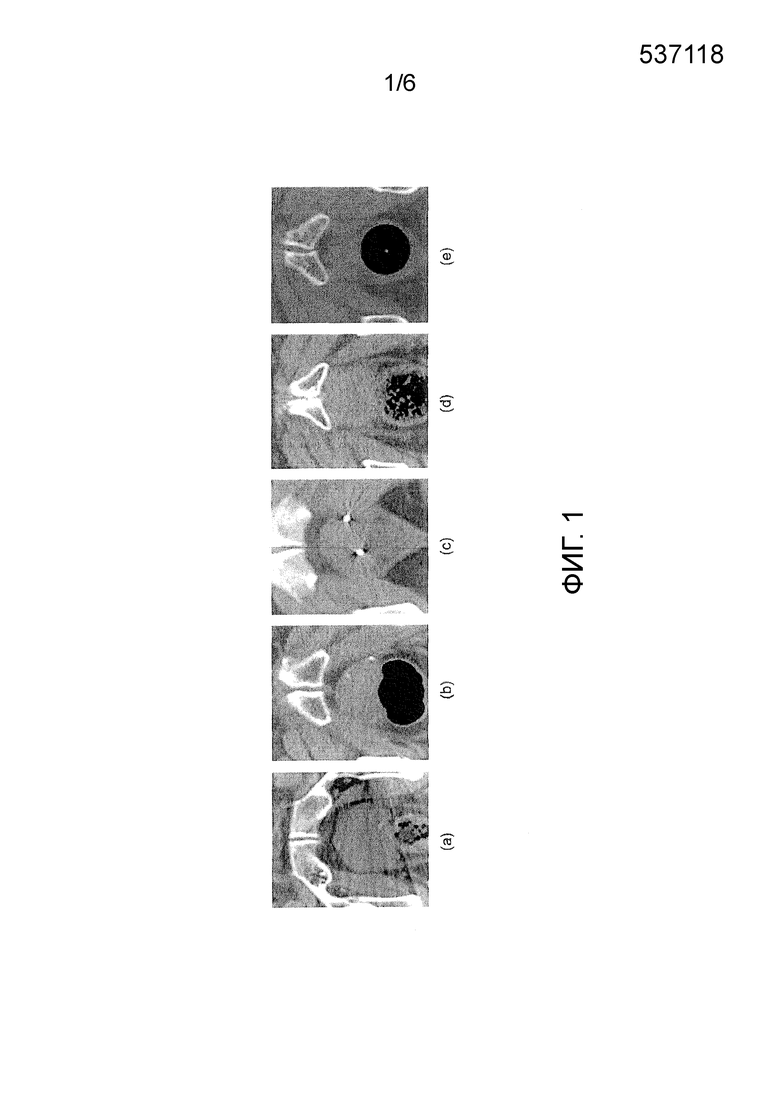
[0003] Среди всех органов, в которых лечат рак, предстательная железа является очень важной в тазовой области у мужчин, но очень трудной для автоматического построения контуров. Основные проблемы включают в себя: (1) низкий контраст на 3D КТ-изображениях, который делает большую часть границы предстательной железы почти невидимой (смотри фиг. 1); (2) артефакты изображения, создаваемые семенем предстательной железы (смотри фиг. 1(a) и (c)); (3) большую площадь газа/кала/извилины, находящихся в прямой кишке (смотри фиг. 1(b), (d) и (e)); и (4) непредсказуемое состояние предстательной железы на различных стадиях лечения.
[0004] В настоящее время, когда составляют новый план или во время лечения, врачи при составлении нового плана/лечения обычно не используют предыдущие планы того же пациента и не включают предыдущие планы пациента. Даже когда используют предыдущие планы, предыдущие планы включают посредством совмещения предыдущих контуров с текущим изображением. Одним из обычных способов является жесткое совмещение, однако данный способ обеспечивает только несколько степеней свободы. Таким образом, совмещенный контур не может быть точным. Можно использовать деформируемое совмещение для улучшения точности посредством вычисления нелинейных деформаций органов. В общем, точность контура может зависеть от числа используемых эталонных изображений (атласов). Однако имеет место увеличение вычислительных затрат пропорционально числу используемых эталонных изображений (атласов), что делает трудным его использование для адаптивного планирования в режиме онлайн.
[0005] Поэтому желательно разработать новые способ и систему для осуществления точного и эффективного автоматического построения контуров на медицинских изображениях.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0006] Один вариант осуществления настоящего раскрытия направлен на реализуемый с помощью процессора способ осуществления автоматического построения контуров на медицинском изображении. Способ может включать в себя прием изображения, содержащего область исследования, и определение с помощью процессора первого контура области исследования с использованием детектора границ. Способ может также включать в себя уточнение с помощью процессора первого контура на основании справочника форм для генерирования второго контура области исследования. Способ может включать в себя обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура.
[0007] В различных вариантах осуществления способ может включать в себя один или более из следующих признаков: уточнение с помощью процессора второго контура может включать в себя использование детектора границ; определение с помощью процессора первого контура может включать в себя определение того, находится ли точка изображения на границе области исследования; и выбор набора точек изображения, которые определены как находящиеся на границе области исследования, для формирования первого контура; определение того, находится ли упомянутая точка изображения на границе области исследования, может включать в себя определение вероятности того, что эта точка изображения находится на границе, и выбор упомянутого набора точек изображения для формирования первого контура включает в себя выбор точек изображения, имеющих более высокие вероятности, чем заранее заданная пороговая величина; уточнение с помощью процессора первого контура на основании справочника форм для генерирования второго контура может включать в себя выбор набора форм из справочника форм; объединение выбранного набора форм для аппроксимирования первого контура; и генерирование второго контура на основании объединенного набора форм; способ может включать в себя определение того, находится ли на втором контуре по меньшей мере подмножество точек изображения на первом контуре, посредством минимизации функции оптимизации; обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура может включать в себя обновление детектора границ и (a) определение обновленного первого контура после обновления детектора границ на основании второго контура, (b) уточнение обновленного первого контура на основании справочника форм для генерирования обновленного второго контура и повторение этапов (a) и (b) до тех пор, пока не будет удовлетворено по меньшей мере одно из следующих условий: число повторений достигнет заранее заданного значения, или остаточная ошибка достигнет заранее заданного минимума; обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура может включать в себя обновление детектора границ, причем обновление детектора границ может включать в себя сравнение изображения, имеющего второй контур, с коллекцией изображений, содержащих область исследования, выбор подмножества изображений из коллекции, похожих на изображение, имеющее второй контур, и обновление детектора границ на основании изображения, имеющего второй контур, и выбранного подмножества изображений; обновление детектора границ на основании изображения, имеющего второй контур, и выбранного подмножества изображений может включать в себя: разделение положительных и отрицательных точек изображения, выбор положительных точек изображения, расположенных на втором контуре или на границах выбранного подмножества изображений, извлечение поворачиваемых признаков из выбранных положительных точек изображения, определение вектора признаков на основании извлеченных поворачиваемых признаков и обновление детектора границ на основании вектора признаков; и обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура может включать в себя обновление справочника форм, причем обновление справочника форм включает в себя: выбор подмножества форм на изображении, содержащем второй контур, получение коэффициента разрежения для каждой формы в упомянутом подмножестве и обновление справочника форм на основании полученных коэффициентов разрежения.
[0008] Другой вариант осуществления настоящего раскрытия направлен на систему для осуществления автоматического построения контуров на медицинском изображении. Система может включать в себя процессор и память, оперативно соединенную с процессором и хранящую инструкции, которые, будучи исполняемыми процессором, заставляют процессор осуществлять способ. Способ может включать в себя прием изображения, содержащего область исследования; определение первого контура области исследования с использованием детектора границ; уточнение первого контура на основании справочника форм для генерирования второго контура области исследования; и обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура.
[0009] В различных вариантах осуществления система может включать в себя один или более из следующих признаков: способ, осуществляемый с помощью процессора, может включать в себя определение того, находится ли точка изображения на границе области исследования, и выбор набора точек изображения, которые определены как находящиеся на границе области исследования, для формирования первого контура; способ может включать в себя определение вероятности того, что точка изображения находится на границе, и выбор точек изображения, имеющих более высокие вероятности, чем заранее заданная пороговая величина; способ может включать в себя выбор набора форм из справочника форм; объединение выбранного набора форм для аппроксимирования первого контура; и генерирование второго контура на основании объединенного набора форм; способ может включать в себя определение того, находится ли на втором контуре по меньшей мере подмножество точек изображения на первом контуре, посредством минимизации функции оптимизации; обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура может включать в себя обновление детектора границ и (a) определение обновленного первого контура после обновления детектора границ на основании второго контура; (b) уточнение обновленного первого контура на основании справочника форм для генерирования обновленного второго контура; и повторение этапов (a) и (b) до тех пор, пока не будет удовлетворено по меньшей мере одно из следующих условий: число повторений достигнет заранее заданного значения; или остаточная ошибка достигнет заранее заданного минимума; способ может включать в себя уточнение второго контура с использованием детектора границ.
[0010] Другой вариант осуществления настоящего раскрытия направлен на реализуемый на компьютере способ обучения детектора границ на основании множества медицинских изображений, содержащих область исследования. Способ может включать в себя выбор с помощью процессора точек изображения, расположенных на границах области исследования, из множества медицинских изображений; извлечение с помощью процессора поворачиваемых признаков из выбранных точек изображения; определение с помощью процессора вектора признаков на основании извлеченных поворачиваемых признаков; и генерирование с помощью процессора детектора границ на основании вектора признаков.
[0011] В различных вариантах осуществления способ может включать в себя один или более из следующих признаков: сравнение нового изображения, имеющего новый контур, с упомянутым множеством медицинских изображений; выбор подмножества медицинских изображений из упомянутого множества на основании их сходства с упомянутым новым изображением, имеющим новый контур; и обновление детектора границ на основании этого нового изображения, имеющего новый контур, и выбранного подмножества медицинских изображений; выбор подмножества форм из упомянутого нового изображения, содержащем новый контур; получение коэффициента разрежения для каждой формы в упомянутом подмножестве; и обновление справочника форм на основании полученного коэффициента разрежения.
[0012] Предшествующее краткое изложение и нижеследующее подробное описание являются только иллюстративными и не ограничивают объем формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] Прилагаемые чертежи, которые включены в настоящее описание изобретения и составляют его часть, в сочетании с описанием иллюстрируют различные варианты осуществления и примерные аспекты раскрытых вариантов осуществления. На чертежах:
[0014] Фиг. 1 показывает примерные медицинские изображения предстательной железы;
[0015] Фиг. 2 показывает примерную последовательность действий системы автоматического построения контуров в соответствии с вариантом осуществления настоящего изобретения;
[0016] Фиг. 3 показывает примерные результаты автоматического построения контуров в соответствии с вариантом осуществления настоящего изобретения;
[0017] Фиг. 4 представляет собой блок-схему примерного способа осуществления автоматического построения контуров в соответствии с вариантом осуществления настоящего изобретения;
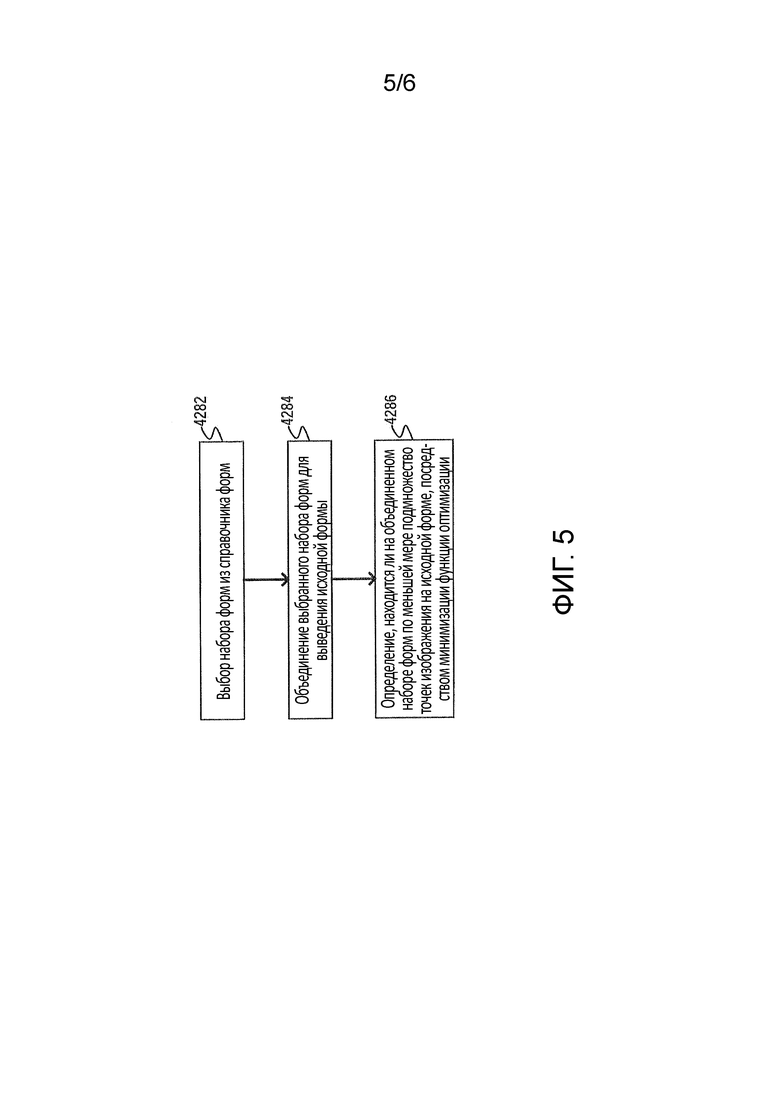
[0018] Фиг. 5 представляет собой блок-схему примерного способа осуществления уточнения контуров в соответствии с вариантом осуществления настоящего изобретения; и
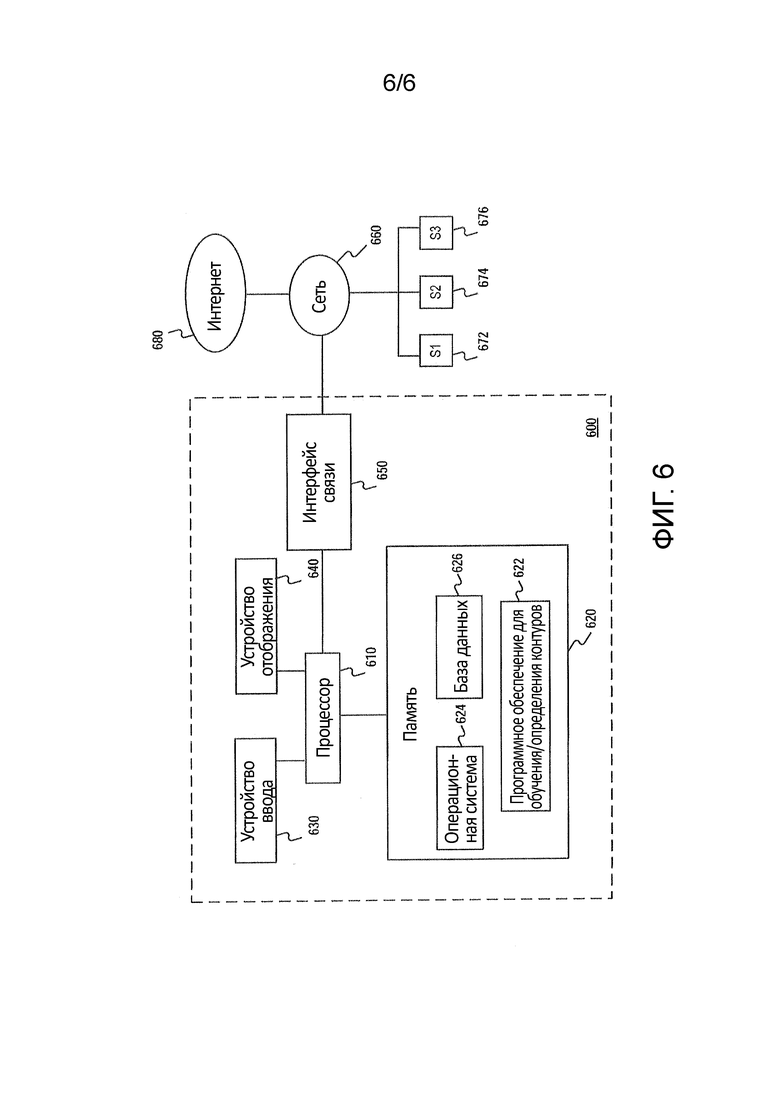
[0019] Фиг. 6 представляет собой схематическую диаграмму примерной системы автоматического построения контуров в соответствии с вариантом осуществления настоящего изобретения.
ОПИСАНИЕ примерных ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0020] Теперь будут подробно рассмотрены примерные варианты осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. При необходимости одни и те же ссылочные позиции используются на всех чертежах для обозначения одних и тех же или схожих частей.
[0021] В настоящем раскрытии предложены основанная на обучении система и соответствующий способ автоматического построения контуров в адаптивной радиотерапии. В частности, могут быть обучены детектор границ популяционного уровня и разреженный справочник форм популяционного уровня. Обученные детектор границ и разреженный справочник форм затем могут быть использованы для осуществления автоматического построения контуров на изображении пациента при планировании. Если собраны еще изображения при лечении, система может автоматически обновлять детектор границ и разреженный справочник форм для включения персонифицированной информации. Когда принимают новое изображение при лечении, система может осуществлять автоматическое построение контуров представляющего интерес органа в процессе обработки.
[0022] Одним из преимуществ данного подхода является его высокая точность. На стадии автоматического построения контуров в режиме онлайн способ может достигать среднего DICE 0,93 на предстательной железе. Другим преимуществом данного подхода является то, что он может достаточно хорошо работать с изображениями плохого качества (например, изображениями, показанными на фиг. 1), поскольку постоянные артефакты/низкое качество могут быть изучены и рассматриваться как часть персонифицированной информации. Кроме того, данный способ вычислительно эффективен при применении к новому изображению, поскольку процесс обновления модели может быть осуществлен в автономном режиме и полностью автоматически, что может быть выполнено в любое время, когда машина свободна. Автоматическое построение контуров в режиме онлайн может занимать такое же количество времени независимо от того, сколько изображений для обучения собрано. Это является преимуществом над способом деформируемого совмещения, который требует нескольких атласов, в котором продолжительность времени автоматического построения контуров повышается пропорционально числу используемых атласов. В результате, раскрытая основанная на обучении система может давать точные результаты автоматического построения контуров. Процессы обучения и обновления в автономном режиме могут быть полностью автоматическими. Процесс автоматического построения контуров в режиме онлайн может быть вычислительно эффективным. Система может обрабатывать изображения любого качества, что хорошо подходит для адаптивной радиотерапии в клиниках.
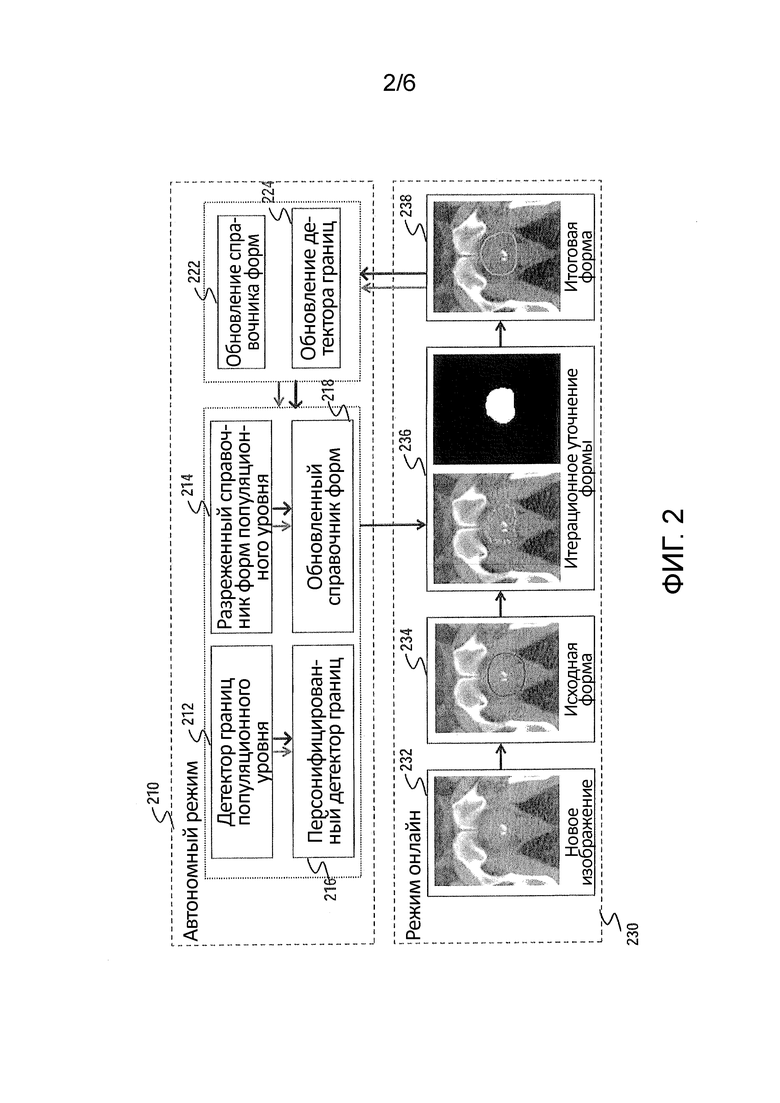
[0023] Фиг. 2 показывает примерную последовательность действий системы автоматического построения контуров. Верхняя часть показывает этапы обучения/обновления в автономном режиме, а нижняя часть показывает компоненты автоматического построения контуров в режиме онлайн. Последовательность алгоритмов, участвующих в обучении/обновлении в автономном режиме отмечена двойными стрелками. Последовательность алгоритмов, участвующих в процессе автоматического построения контуров онлайн, отмечена одинарными стрелками.
[0024] Детектор границ популяционного уровня
[0025] Для того чтобы обнаруживать поверхность границы предстательной железы на новом изображении, в автономном режиме часть системы (210) сначала обучает детектор 212 границ популяционного уровня. Из набора изображений пациентов система может собирать положительные и отрицательные образцы в соответствии, например, с контурами, вручную обеспеченными специалистом. Вокселы границы на контурах могут быть выбраны в качестве положительных образцов, тогда как вокселы вдалеке от контура могут быть выбраны в качестве отрицательных образцов. Для каждого обучающего образца поворачиваемые в 3D признаки могут быть извлечены и сохранены в виде вектора признаков. Можно использовать алгоритм случайного леса для обучения детектора границ по собранным образцам. Когда детектор границ сгенерирован, для каждого последующего изображения система может выполнять поиск по направлению нормали к находящейся в исходном состоянии форме и может использовать детектор границ для принятия решения для каждой точки, находится ли она на границе или нет. Детектор границ может возвращать вероятность того, что точка находится на границе. Среди всех точек в диапазоне поиска точки с наивысшей вероятностью или с вероятностью более высокой, чем заранее заданная пороговая величина, могут быть выбраны в качестве новых точек границы.
[0026] Разреженное уточнение формы популяционного уровня
[0027] Обнаруженные детектором границ 3D-границы могут быть довольно зашумленными. Для уменьшения шума можно использовать разреженную модель формы для уточнения детектированных границ. В некоторых вариантах осуществления можно использовать разреженный справочник 214 форм популяционного уровня в качестве формы до выведения обнаруженной формы границы. Разреженный справочник 214 форм может выбирать разреженный набор 3D-форм в справочнике форм и объединять их вместе для аппроксимирования первого контура и уточнения исходной формы (например, обнаруженных границ). Данный способ использует два наблюдения разреженности примера исходной формы: (1) исходная форма может быть приблизительно представлена разреженной линейной комбинацией форм в справочнике форм; и (2) части исходной формы могут содержать грубые ошибки, но такие ошибки разрежены. Данный способ может облегчать три проблемы предварительного моделирования формы, то есть моделирование сложных вариаций формы, обработку негауссовых ошибок и сохранение локальной подробной информации исходной формы.
[0028] Для каждой итерации уточнения способ может устанавливать алгоритм минимизации следующей функции оптимизации:
[0029]  (1)
(1)
[0030] где  представляет собой подмножество точек на исходной форме, D представляет собой справочник форм, который представляет все обучающие формы,
представляет собой подмножество точек на исходной форме, D представляет собой справочник форм, который представляет все обучающие формы,  представляет собой глобальный оператор преобразования с параметром β, который выравнивает исходную форму с тем же пространством D. В уравнении x обозначает весовой коэффициент линейной комбинации, и e представляет собой вектор, который моделирует большие остаточные ошибки. S представляет собой бинарную диагональную матрицу, которая показывает, находится ли определенная точка в подмножестве . В данном случае S представляет собой местоположения обнаруженных границ, представляемые их координатами x,y,z на 3D КТ-изображениях. Вычисленная форма затем посылается назад на детектор 212 границ для другого круга уточнения формы. Этот итерационный процесс останавливается, когда (1) он достигает определенного числа итераций (например, 10 итераций); или (2) он достигает определенной минимальной остаточной ошибки.
представляет собой глобальный оператор преобразования с параметром β, который выравнивает исходную форму с тем же пространством D. В уравнении x обозначает весовой коэффициент линейной комбинации, и e представляет собой вектор, который моделирует большие остаточные ошибки. S представляет собой бинарную диагональную матрицу, которая показывает, находится ли определенная точка в подмножестве . В данном случае S представляет собой местоположения обнаруженных границ, представляемые их координатами x,y,z на 3D КТ-изображениях. Вычисленная форма затем посылается назад на детектор 212 границ для другого круга уточнения формы. Этот итерационный процесс останавливается, когда (1) он достигает определенного числа итераций (например, 10 итераций); или (2) он достигает определенной минимальной остаточной ошибки.
[0031] Адаптация персонифицированной информации
[0032] Когда собирают новое изображение при лечении (например, новое изображение 232), может оказаться необходимым обновить детектор 212 границ и разреженный справочник 214 форм для включения персонифицированной информации и генерации персонифицированного детектора границ 216 и обновленного справочника 218 форм соответственно. Для персонифицированного детектора границ 216 система может сравнивать текущее изображение с набором собранных изображений пациентов и отбирать набор изображений пациентов, которые схожи с текущим изображением. Предыдущие изображения того же пациента могут быть выбраны в качестве наиболее похожих изображений, но также могут быть выбраны изображения от других пациентов, которые имеют схожую структуру изображений. Выбранные изображения пациентов можно использовать для обновления детектора границ для формирования персонифицированного детектора границ 216. Процесс обновление происходит в автономном режиме (например, процессы 222 и 224 обновления) и не требует вмешательства человека.
[0033] При том, что обновление детектора границ может быть довольно эффективным, поскольку для обучения детектора границ требуется не так много изображений, обновление разреженного справочника форм для генерирования обновленного справочника 218 форм может быть довольно дорогостоящим в вычислительном отношении. Для обработки больших вариаций формы даже от того же самого пациента необходим общий справочник форм, который может всесторонне охватывать вариации формы в пространстве форм, поэтому может оказаться нежелательным ограничивать число обучающих форм. Однако желательным также может оказаться включение в справочник форм недавних изображений пациента для охвата персонифицированной информации. Для того чтобы избежать обучения справочника форм с нулевого уровня, которое требует очень много времени, и улучшить вычислительную эффективность, можно использовать методы обучения справочника. Например, можно использовать способ обучения в режиме онлайн для адаптивного и эффективного включения новых форм. Когда появляются новые обучающие формы, вместо того, чтобы перестраивать справочник форм с нулевого уровня, система может обновлять справочник форм, используя подход блочно-покоординатного спуска. При использовании динамически обновляемого справочника разреженную модель формы можно легко масштабировать на модельные формы из большого числа обучающих форм, не жертвуя эффективностью выполнения. В одном варианте осуществления данный способ начинается с построения исходного справочника форм с помощью алгоритма K-SVD. Когда появляется новая форма, он итерационно использует вплоть до схождения две стадии: разреженное кодирование и обновление справочника. Разреженное кодирование направлено на нахождение коэффициента разрежения для каждого сигнала, стадия обновления справочника направлена на обновление справочника на основании всех обнаруженных коэффициентов. На основании стохастической аппроксимации справочник можно эффективно обновлять используя способ блочно-покоординатного спуска. Этот способ не имеет параметров и не требует никакой настройки скорости обучения. Важно отметить, что на этапе обновления справочника вместо того, чтобы требовать все обучающие формы, система может использовать только небольшую партию новых полученных данных. Таким образом, справочник форм можно эффективно обновлять в режиме онлайн с использованием новых выбранных данных. При использовании этого обновленного в режиме онлайн справочника эффективность выполнения построения формы не снижается при увеличении числа обучающих форм. Кроме того, способ можно легко масштабировать для включения предшествующих форм из теоретически бесконечного числа обучающих форм.
[0034] Автоматическое построение контуров в режиме онлайн
[0035] Автоматическое построение контуров в режиме онлайн может начинаться с исходной формы (например, исходной формы 234 на фиг. 2). В одном варианте осуществления можно использовать способ DEMONS с одним атласом для получения исходного контура. Для каждого воксела на поверхности исходного контура система (например, онлайн часть системы 230) может выполнять поиск вдоль направления его нормали и применять детектор 212 границ для нахождения воксела с наивысшей вероятностью границы или с вероятностью, более высокой, чем заранее заданная пороговая величина. Затем система может использовать разреженный справочник 214 форм для уточнения обнаруженной 3D-поверхности границы (например, уточнения 236 на фиг. 2). Классификация и уточнение могут быть применены в нескольких итерациях для получения более точных результатов (например, итоговой формы 238).
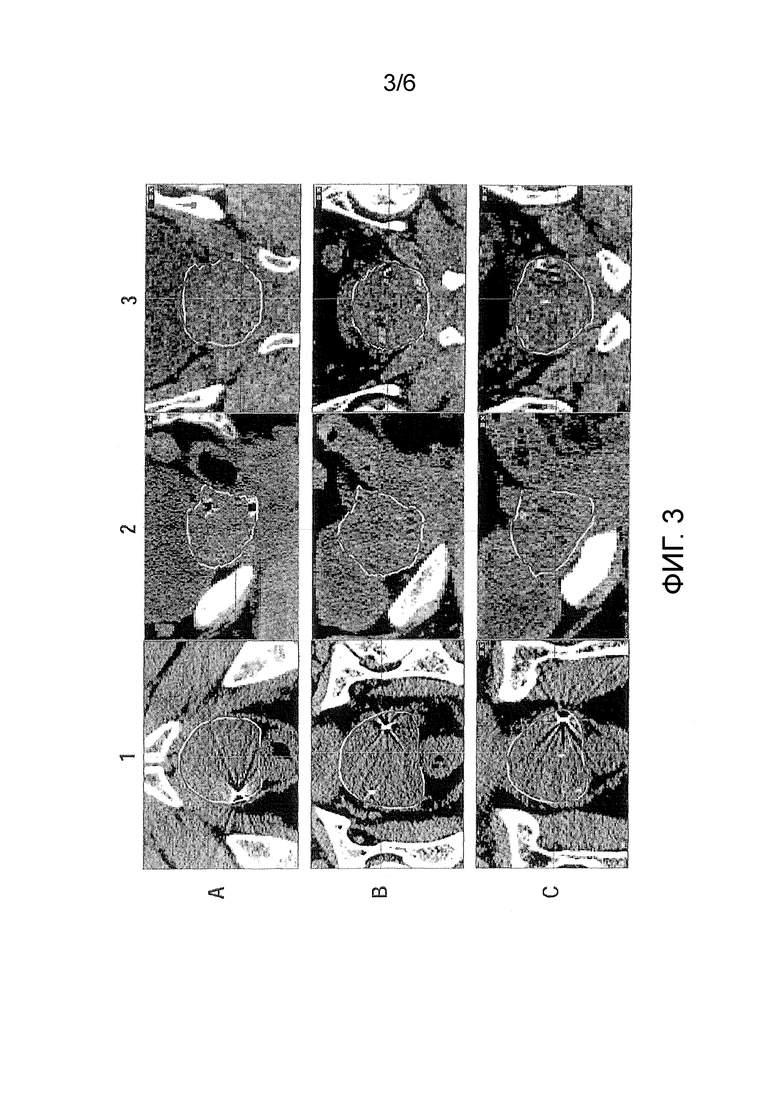
[0036] Фиг. 3 показывает примерные результаты автоматического построения контуров в соответствии с вариантом осуществления настоящего изобретения. 44 3D КТ-изображения от 11 пациентов обработаны для оценки раскрытых способа и системы, и каждый пациент имеет по меньшей мере 3 изображения при лечении. На фиг. 3 показаны результаты автоматической сегментации для 3 пациентов сверху вниз (строки A, B и C соответствуют патентам A, B и C соответственно). Каждый пациент имеет по три снимка своих аксиальной, сагиттальной и коронарной проекций (колонки 1, 2 и 3 соответствуют трем снимкам соответственно). Результаты автоматического построения контуров (красный цвет) сравнивают с контурами, проведенными специалистом вручную (желтый цвет). Средний DICE достигает 0,93 для предстательной железы.
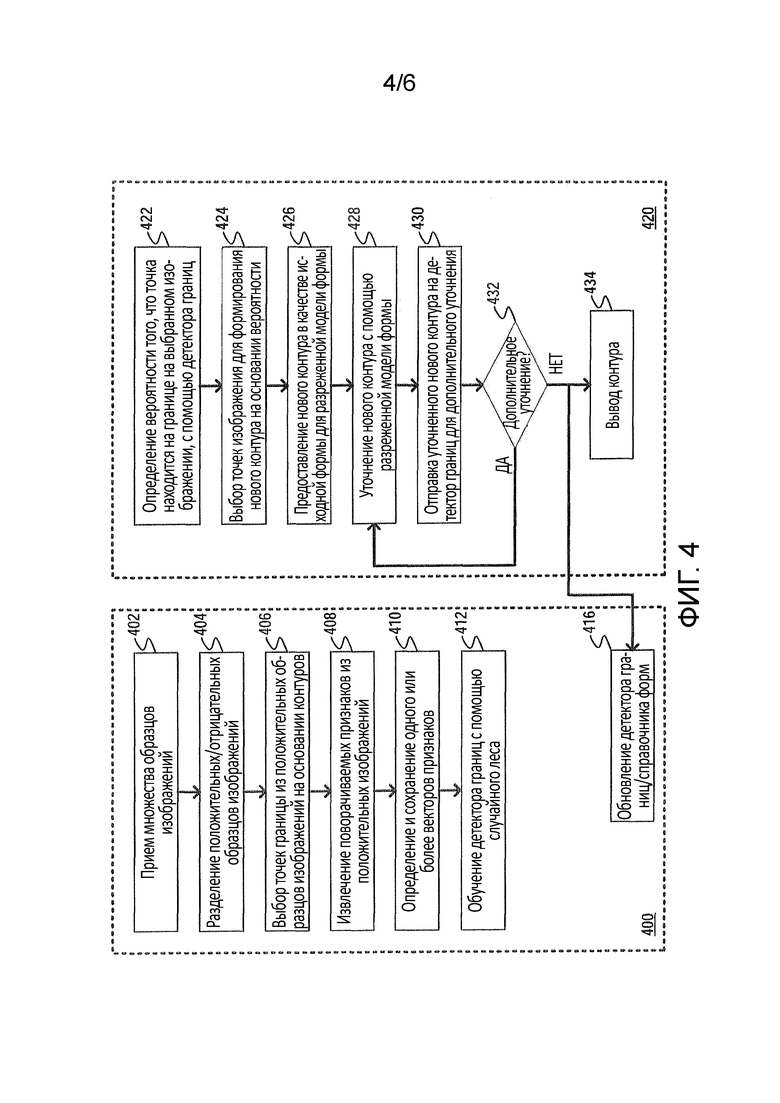
[0037] Фиг. 4 представляет собой блок-схему примерного способа осуществления автоматического построения контуров в соответствии с вариантом осуществления по настоящему изобретению. На фиг. 4 показана серия этапов для осуществления раскрытого способа, некоторые из которых могут быть необязательными. Фиг. 4 показывает подпрограмму 400 обучения/обновления и подпрограмму 420 определения контуров. В некоторых вариантах осуществления подпрограмма 400 обучения/обновления может выполняться в автономном режиме, например, когда система не принимает новые изображения от КТ-сканера. На этапе 402 система может принимать множество образцов изображений. Образцы изображений могут включать 3D КТ-изображения от одного пациента или от различных пациентов. Затем на этапе 404 образцы изображений могут быть разделены на положительные и отрицательные образцы изображений на основании, например, проведенных вручную специалистом контуров или автоматических контуров, сгенерированных компьютерными программами. Положительные образцы изображений могут включать в себя точки изображения, которые расположены на контурах, тогда как отрицательные образцы изображений могут включать в себя точки изображения, которые удалены от контуров. На этапе 406 система может выбирать точки границы из положительных образцов изображений на основании контуров, проведенных специалистом или компьютерными программами. На этапе 408 система может извлекать поворачиваемые в 3D признаки из выбранных точек границы на положительных образцах изображений. Известно, что поворачиваемые в 3D признаки являются инвариантными относительно вращения. Данные признаки извлекают из кубической области вокруг каждого отобранного воксела. Ориентация куба соответствует направлению нормали отобранного воксела. Признаки извлекают из каждого куба и сохраняют в виде вектора признаков для каждого отобранного воксела. На этапе 410 система может определять один или более векторов признаков на основании извлеченных поворачиваемых признаков и сохранять векторы признаков. На этапе 412 система может использовать алгоритм случайного леса для обучения детектора границ на собранных образцах изображений.
[0038] Когда персонифицированный детектор границ сгенерирован, персонифицированный детектор границ можно использовать в онлайн подпрограмме 420, например, когда система принимает новые изображения от КТ-сканера. Когда принято новое изображение, процесс переходит к этапу 422, на котором процесс включает в себя поиск вдоль направления нормали к новому изображению и использование персонифицированного детектора границ для определения для каждой точки, находится ли она на границе или нет. Например, система может определять вероятность того, находится ли точка на границе на изображении, используя персонифицированный детектор границ. На этапе 424 система может выбирать точки изображения для формирования нового контура на основании вероятности. Например, система может выбирать точки с наивысшей вероятностью для формирования новой точки границы. В другом примере система может выбирать точки с вероятностью более высокой, чем заранее заданная пороговая величина, для формирования новой точки границы. На этапе 426 система может предоставлять новый контур, например формируемый новыми точками границы, выбранными на этапе 424, в разреженный справочник 214 форм для уточнения. Например, новый контур может быть предоставлен в качестве исходной формы для разреженной модели формы. На этапе 428 система может уточнять новый контур, используя разреженную модель формы. В некоторых вариантах осуществления уточнение осуществляется итерационно. На этапе 430 уточненный новый контур может быть отправлен обратно на персонифицированный детектор границ для дополнительного уточнения формы. Затем на этапе 432 система определяет, нужна ли дополнительная итерация уточнения. Если определено, что нужно дополнительное уточнение, то процесс возвращается назад к этапу 428, и контур подвергают новому кругу уточнения с использованием разреженной модели формы. Если нет, то процесс переходит к этапу 434 для вывода итогового изображения, включающего в себя итоговый контур. Итоговое изображение можно использовать для обновления персонифицированного детектора границ и/или справочника форм, как показано на этапе 416. Обновление детектора границ аналогично обучению исходного детектора границ за исключением того, что в этом случае образцы изображений включают в себя итоговое изображение, сгенерированное подпрограммой 420. Обновление справочника форм использует подмножество форм с помощью способа блочно-покоординатного спуска, как раскрыто выше.
[0039] Фиг. 5 представляет собой блок-схему примерного способа осуществления уточнения контуров в соответствии с вариантом осуществления настоящего изобретения. На фиг. 5 этап 428 с фиг. 4 дополнительно разделен на три подэтапа. На этапе 4282 система может выбирать набор форм (например, 3D-форм) из справочника форм. На этапе 4284 система может объединять выбранный набор форм для аппроксимирования или выведения исходной формы, в этом случае новый контур предоставлен на этапе 426 с фиг. 4. На этапе 4286 система может определять, находится ли на объединенном наборе форм по меньшей мере подмножество точек изображения на исходной форме, посредством минимизации функции оптимизации, такой как, например, функция (1). Комбинация форм может затем быть отправлена обратно на детектор границ для дополнительного уточнения, как показано на этапе 430 с фиг. 4.
[0040] Фиг. 6 иллюстрирует примерную систему 600 для осуществления уточнения контуров. В соответствии с некоторыми вариантами осуществления система 600 может представлять собой компьютер общего назначения или вычислительное устройство, предназначенное для автоматического построения контуров. Как оказано на фиг. 6, система 600 может включать в себя процессор 610, модуль 620 памяти, устройство 630 пользовательского ввода, устройство 640 отображения и интерфейс 650 связи. Процессор 610 может представлять собой центральное процессорное устройство («CPU») или графическое процессорное устройство («GPU»). В зависимости от типа используемого аппаратного обеспечения процессор 610 может включать в себя одну или более печатных плат и/или чип микропроцессора. Процессор 610 может исполнять последовательности компьютерных программных инструкций для осуществления различных способов, которые будут более подробно рассмотрены ниже.
[0041] Модуль 620 памяти может включают, помимо прочего, память с произвольным доступом («RAM») и доступную только для чтения память («ROM»). Компьютерные программные инструкции могут быть доступны и прочтены из ROM или любой другой подходящей области памяти и загружены в RAM для выполнения с помощью процессора 610. Например, модуль 620 памяти может хранить одно или более программных приложений. Программные приложения, сохраненные в модуле 620 памяти, могут содержать операционную систему 624 для общих компьютерных систем, а также для программно-управляемых устройств. Кроме того, модуль памяти может хранить программное приложение полностью или только часть программного приложения, которая может быть выполнена с помощью процессора 610.
[0042] В некоторых вариантах осуществления модуль 620 памяти может хранить программное обеспечение 622 для обучения и/или определения контуров, которое может быть выполнено с помощью процессора 610. Например, программное обеспечение 622 для обучения/определения контуров может быть выполнено для обучения детектора 212 границ, справочника 214 форм; осуществления автоматического построения контуров на изображениях 232-236 и/или осуществления обновления детектора 212 границ, справочника 214 форм. Также предполагается, что программное обеспечение 622 для обучения/определения контуров или его части могут быть сохранены на съемном машиночитаемом носителе, таком как жесткий диск, компьютерный диск, CD-ROM, DVD±R, CD±RW или DVD±RW, HD или Blu-ray DVD, флеш-накопитель USB, карта SD, карта памяти или любой другой подходящий носитель, и могут выполняться на любом подходящем компоненте системы 600. Например, части программного обеспечения 622 для обучения/определения контуров могут быть расположены на съемном машиночитаемом носителе и могут быть прочитаны и выполнены с помощью процессора 610 с использованием процедур, которые были скопированы в память 620.
[0043] В некоторых вариантах осуществления модуль 620 памяти может также хранить основные данные, пользовательские данные, данные приложения и/или программный код. Например, модуль 620 памяти может хранить базу 626 данных, содержащую различные данные, используемые для осуществления обучения/обновления/определения контуров.
[0044] В некоторых вариантах осуществления устройство 630 ввода и устройство 640 отображения могут быть связаны с процессором 610 посредством соответствующей интерфейсной схемы. В некоторых вариантах осуществления устройство 630 ввода может представлять собой аппаратную клавиатуру, кнопочную панель или сенсорный экран, посредством которых пользователь может вводить информацию в систему 600. Устройство 640 отображения может включать в себя один или более дисплейных экранов, которые отображают интерфейс моделирования, результат или любую подходящую информацию для пользователя.
[0045] Интерфейс 650 связи может обеспечивать коммуникационные соединения, так что система 600 может обмениваться данными с внешними устройствами. Например, система 600 может быть связана с сетью 660. Сеть 660 может представлять собой LAN или WAN, которые могут включать в себя другие системы S1 (672), S2 (674) и S3 (676). Системы S1, S2 и/или S3 могут быть идентичны системе 600 или могут представлять собой другие системы. В некоторых вариантах осуществления одна или более из систем в сети 660 могут образовывать распределенную среду для вычислений/моделирования, которая совместно выполняет задачу обучения/обновления/определения контуров. В некоторых вариантах осуществления одна или более систем S1, S2 и S3 могут включать в себя КТ-сканер, который получает КТ-изображения (например, изображение 232). Кроме того, сеть 660 может быть соединена с интернетом 680 для связи с серверами или клиентами, которые расположены удаленно в интернете.
[0046] В вышеприведенных описаниях различные аспекты, этапы или компоненты сгруппированы вместе в одном варианте осуществления для целей иллюстрации. Настоящее раскрытие не следует интерпретировать как требующее для заявленного объекта всех раскрытых вариантов. Нижеследующая формула изобретения включена в настоящее описание примерных вариантов осуществления, причем каждый пункт формулы изобретения говорит сам за себя как отдельный вариант осуществления настоящего изобретения.
[0047] Кроме того, специалистам в данной области техники будет ясно из рассмотрения настоящего описания изобретения и осуществления на практике настоящего раскрытия, что могут быть осуществлены различные модификации и изменения раскрытых систем и способов без отклонения от объема настоящего раскрытия, как он определен формулой изобретения. Таким образом, подразумевается, что описание изобретения и примеры следует рассматривать только как иллюстрации, тогда как истинный объем настоящего раскрытия указывается нижеследующими пунктами формулы изобретения и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ПЛАНИРОВАНИЯ ДВУХМЕРНЫХ ВИДОВ В ОБЪЕМНЫХ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЯХ | 2013 |
|
RU2526752C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ДИАГНОСТИКИ ТАЗОБЕДРЕННЫХ СУСТАВОВ | 2022 |
|
RU2795658C1 |
| Способ подготовки и выполнения хирургической операции на органах малого таза | 2020 |
|
RU2736800C1 |
| УСТРОЙСТВО, СПОСОБ И СИСТЕМА ДЛЯ РЕКОНСТРУКЦИИ 3D-МОДЕЛИ ОБЪЕКТА | 2015 |
|
RU2642167C2 |
| ОБНАРУЖЕНИЕ ЗАРАЖЕНИЯ РАСТЕНИЙ БОЛЕЗНЯМИ ПУТЕМ КЛАССИФИКАЦИИ ФОТОСНИМКОВ РАСТЕНИЙ | 2019 |
|
RU2805670C2 |
| СПОСОБ И СИСТЕМА СВЕРХРАЗРЕШЕНИЯ С ПОМОЩЬЮ КОМБИНИРОВАННОЙ РАЗРЕЖЕННОЙ АППРОКСИМАЦИИ | 2016 |
|
RU2661537C2 |
| СИСТЕМА И СПОСОБ ДИАГНОСТИКИ ТАЗОБЕДРЕННЫХ СУСТАВОВ | 2022 |
|
RU2801420C1 |
| СИСТЕМЫ И СПОСОБЫ ПОДДЕРЖКИ КЛИНИЧЕСКИХ РЕШЕНИЙ | 2010 |
|
RU2543563C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБУЧАЮЩИХСЯ МОДЕЛЕЙ ПЛАНОВ РАДИОТЕРАПЕВТИЧЕСКОГО ЛЕЧЕНИЯ С ПРОГНОЗИРОВАНИЕМ РАСПРЕДЕЛЕНИЙ ДОЗЫ РАДИОТЕРАПИИ | 2017 |
|
RU2719028C1 |
| ДЕТЕКТИРОВАНИЕ БАРКОДОВ НА ИЗОБРАЖЕНИЯХ | 2018 |
|
RU2695054C1 |
Изобретение относится к медицине, а именно к медицинской визуализации и лечению, и может быть использовано для автоматического построения контуров на медицинском изображении. Система для осуществления способа, содержащая: процессор; память, оперативно соединенную с процессором и хранящую инструкции, которые, будучи исполняемыми процессором, заставляют процессор осуществлять способ, содержащий: прием изображения, содержащего область исследования; определение первого контура области исследования с использованием детектора границ; уточнение первого контура на основании справочника форм для генерирования второго контура области исследования; и обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура. Изобретение также может быть использовано для обучения детектора границ на основании множества медицинских изображений, содержащих область исследования. Способ включает в себя: выбор с помощью процессора точек изображения, расположенных на границах области исследования, из упомянутого множества медицинских изображений; извлечение с помощью процессора инвариантных относительно вращения признаков из выбранных точек изображения; определение с помощью процессора вектора признаков на основании извлеченных инвариантных относительно вращения признаков; и генерирование с помощью процессора детектора границ на основании вектора признаков. 3 н. и 17 з.п. ф-лы, 6 ил.
1. Реализуемый с помощью процессора способ осуществления автоматического построения контуров на медицинском изображении, содержащий:
прием изображения, содержащего область исследования;
определение с помощью процессора первого контура области исследования с использованием детектора границ;
уточнение с помощью процессора первого контура на основании справочника форм для генерирования второго контура области исследования; и
обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура.
2. Способ по п. 1, содержащий уточнение с помощью процессора второго контура с использованием детектора границ.
3. Способ по п. 1, причем определение с помощью процессора первого контура включает в себя:
определение того, находится ли точка изображения на границе области исследования; и
выбор набора точек изображения, которые определены как находящиеся на границе области исследования, для формирования первого контура.
4. Способ по п. 3, причем:
определение того, находится ли упомянутая точка изображения на границе области исследования, включает в себя определение вероятности того, что эта точка изображения находится на границе; и
выбор упомянутого набора точек изображения для формирования первого контура включает в себя выбор точек изображения, имеющих более высокие вероятности, чем предварительно заданная пороговая величина.
5. Способ по п. 1, причем уточнение с помощью процессора первого контура на основании справочника форм для генерирования второго контура включает в себя:
выбор набора форм из справочника форм;
объединение выбранного набора форм для аппроксимирования первого контура; и
генерирование второго контура на основании объединенного набора форм.
6. Способ по п. 5, включающий в себя:
определение того, находится ли на втором контуре по меньшей мере подмножество точек изображения на первом контуре, посредством минимизации функции оптимизации.
7. Способ по п. 1, причем обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура включает в себя обновление детектора границ и
(a) определение обновленного первого контура после обновления детектора границ на основании второго контура;
(b) уточнение обновленного первого контура на основании справочника форм для генерирования обновленного второго контура; и
повторение этапов (a) и (b) до тех пор, пока не будет удовлетворено по меньшей мере одно из следующих условий:
число повторений достигнет заранее заданного значения;
или остаточная ошибка достигнет заранее заданного минимума.
8. Способ по п. 1, причем обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура включает в себя обновление детектора границ, включающее в себя:
сравнение упомянутого изображения, имеющего второй контур, с коллекцией изображений, содержащих область исследования;
выбор подмножества изображений из коллекции, похожих на изображение, имеющее второй контур; и
обновление детектора границ на основании изображения, имеющего второй контур, и выбранного подмножества изображений.
9. Способ по п. 8, причем обновление детектора границ на основании изображения, имеющего второй контур, и выбранного подмножества изображений включает в себя:
разделение положительных и отрицательных точек изображения;
выбор положительных точек изображения, расположенных на втором контуре или на границах выбранного подмножества изображений;
извлечение инвариантных относительно вращения признаков из выбранных положительных точек изображения;
определение вектора признаков на основании извлеченных инвариантных относительно вращения признаков; и
обновление детектора границ на основании вектора признаков.
10. Способ по п. 1, причем обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура включает в себя обновление справочника форм, и причем обновление справочника форм включает в себя:
выбор подмножества форм из изображения, содержащего второй контур;
получение коэффициента разрежения для каждой формы в упомянутом подмножестве; и
обновление справочника форм на основании полученных коэффициентов разрежения.
11. Система для осуществления автоматического построения контуров на медицинском изображении, содержащая:
процессор;
память, оперативно соединенную с процессором и хранящую инструкции, которые, будучи исполняемыми процессором, заставляют процессор осуществлять способ, содержащий:
прием изображения, содержащего область исследования;
определение первого контура области исследования с использованием детектора границ;
уточнение первого контура на основании справочника форм для генерирования второго контура области исследования; и
обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура.
12. Система по п. 11, причем определение первого контура области исследования с использованием детектора границ включает в себя:
определение того, находится ли точка изображения на границе области исследования; и
выбор набора точек изображения, которые определены как находящиеся на границе области исследования, для формирования первого контура.
13. Система по п. 12, причем определение того, находится ли точка изображения на границе области исследования, включает в себя определение вероятности того, что эта точка изображения находится на границе; и выбор точек изображения, имеющих более высокие вероятности, чем заранее заданная пороговая величина.
14. Система по п. 11, причем уточнение первого контура на основании справочника форм для генерирования второго контура области исследования включает в себя:
выбор набора форм из справочника форм;
объединение выбранного набора форм для аппроксимирования первого контура; и
генерирование второго контура на основании объединенного набора форм.
15. Система по п. 14, причем способ включает в себя:
определение того, находится ли на втором контуре по меньшей мере подмножество точек изображения на первом контуре, посредством минимизации функции оптимизации.
16. Система по п. 11, причем обновление по меньшей мере одного из детектора границ или справочника форм на основании второго контура включает в себя обновление детектора границ и
(a) определение обновленного первого контура после обновления детектора границ на основании второго контура;
(b) уточнение обновленного первого контура на основании справочника форм для генерирования обновленного второго контура; и
повторение этапов (a) и (b) до тех пор, пока не будет удовлетворено по меньшей мере одно из следующих условий:
число повторений достигнет заранее заданного значения; или
остаточная ошибка достигнет заранее заданного минимума.
17. Система по п. 11, причем способ включает в себя уточнение второго контура с использованием детектора границ.
18. Реализуемый на компьютере способ обучения детектора границ на основании множества медицинских изображений, содержащих область исследования, содержащий:
выбор с помощью процессора точек изображения, расположенных на границах области исследования, из упомянутого множества медицинских изображений;
извлечение с помощью процессора инвариантных относительно вращения признаков из выбранных точек изображения;
определение с помощью процессора вектора признаков на основании извлеченных инвариантных относительно вращения признаков; и
генерирование с помощью процессора детектора границ на основании вектора признаков.
19. Реализуемый на компьютере способ по п. 18, содержащий:
сравнение нового изображения, имеющего новый контур, с упомянутым множеством медицинских изображений;
выбор подмножества медицинских изображений из упомянутого множества на основании их сходств с упомянутым новым изображением, имеющим новый контур; и
обновление детектора границ на основании упомянутого нового изображения, имеющего новый контур, и выбранного подмножества медицинских изображений.
20. Реализуемый на компьютере способ по п. 19, содержащий:
выбор подмножества форм из упомянутого нового изображения, содержащего новый контур;
получение коэффициента разрежения для каждой формы в упомянутом подмножестве; и
обновление справочника форм на основании полученного коэффициента разрежения.
| ЧЕРНУХИН Н.А | |||
| Комбинированный метод детектирования границ на рентгенографических медицинских изображениях, использующий методику активных контуров | |||
| Научный журнал КубГАУ, N88(04), 2013 г., сс | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 6366684 B1, 02.04.2002 | |||
| US5871019 A, 16.02.1999 | |||
| БОГДАНОВ А.К | |||
| и др | |||
| Практические применения современных методов анализа изображений в медицине | |||
| Учебное пособие | |||
| Приоритетный национальный проект "Образование" | |||
| Российский университет дружбы народов, 2008, сс | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

