Область техники
Настоящее изобретение относится к способу автокалибровки проекционной геометрии и к способу компенсации движений пациента в области цифровой томографической реконструкции груди с ограниченным углом.
Предпосылки создания изобретения
Приведенное ниже описание относится к рентгеновской цифровой томографической реконструкции груди, при которой множество рентгеновских проекционных изображений, полученных в ограниченном диапазоне томографических углов, используют для реконструкции изображений поперечного сечения анатомических структур пациента. Длительность формирования проекционного рентгеновского изображения при томографии с ограниченным углом составляет, как правило, порядка десяти секунд, поскольку рентгеновская трубка (источник рентгеновского излучения) и датчик (детектор рентгеновского излучения) физически перемещаются по заданной пространственной траектории, которая соответствует ограниченному углу формирования изображения.
Чтобы получить резкое и корректно отображающее анатомию реконструированное изображение, траектория формирования изображения должна быть известна с достаточной степенью точности, а исследуемый объект должен оставаться в достаточной степени неподвижным, поскольку измерения, выполняемые для проекционного изображения, рассматриваются как совместно регистрируемые интегрированные виды неподвижного объекта. Это позволяет получить набор геометрически согласованных измерений, который может использоваться для реконструкции распределения затухания, которое является представлением исследуемой анатомической структуры. Если эти допущения не выполняются, достоверность реконструированного изображения снижается вследствие того, что измеренные проекции становятся несогласованными друг с другом.
Точность окончательного изображения зависит, как правило, от того, насколько допущения, принятые в процессе реконструкции, соответствуют реальной физической процедуре формирования изображения. Предполагаемые пространственные позиции рентгеновского источника и детектора, соответствующие каждому полученному рентгеновскому изображению, влияют на вычисление траекторий лучей в процессе реконструкции. Вследствие неизбежных допусков при изготовлении и эксплуатации, возможных деформаций устройства формирования изображений или опирания пациента об устройство формирования изображений, реальные углы поворота и позиции будут отличаться от идеальных значений, соответствующих расчетной траектории формирования изображения. При этом систематическое отклонение может быть компенсировано при помощи различных способов калибровки, повторяемых через заданные промежутки времени или заданное количество рабочих циклов.
В общем случае самой значительной причиной геометрических погрешностей является возможное движение пациента во время формирования проекционного рентгеновского изображения. В случае цифровой томографической реконструкции груди, это влияние несколько меньше из-за того, что исследуемая анатомическая структура (грудь) во время формирования изображений является физически сдавленной. Тем не менее, если исследуемый объект сдвинется во время формирования проекционного рентгеновского изображения, реальные траектории измерительных лучей станут несогласованными друг с другом. Несмотря на то, что требование сохранять неподвижность всем известно, и пациенты проходят соответствующий инструктаж, пациент, как правило, не может оставаться полностью неподвижным во время получения рентгеновских проекций. Пациент, например, может вздрогнуть от неожиданного движения устройства формирования изображений или от производимых им звуков.
Описанные выше погрешности присутствуют, до некоторой степени, во всех выполняемых на практике измерениях. При самом худшем сценарии результирующая геометрическая несогласованность регистрируемых проекционных изображений может быть настолько высокой, что потребуется повторное сканирование после оценки рентгенологом качества реконструированного изображения. Это является нежелательным, так как дозы радиации, связанные с рентгенографией, необходимо удерживать на минимально возможном уровне.
Маммография это способ рентгенографии, широко используемый при обследованиях на рак груди. При массовых обследованиях маммография показала способность достигать чувствительности в 90-93% и специфичности в 90-97%. Согласно оценкам, маммография позволяет снизить смертность от рака груди на 35% среди женщин старше 50 и на 25-35% среди женщин в возрасте от 40 до 50 лет.
Маммографические изображения изучают на предмет различных аномалий в груди, таких как кальцификации, то есть микроотложения кальция в ткани. Кальцификации обычно не могут быть обнаружены пальпацией, однако видны на рентгеновских снимках. Скопления кальциевых микроотложений, так называемая микрокальцификация, является признаком повышенной активности клеток груди, которая может быть связана с раком груди.
В традиционной маммографии исследуемую молочную железу, как правило, зажимают между двумя компрессионными пластинами и облучают как минимум дважды, сверху и под углом. Если необходимо, формируют третье изображение сбоку. Однако в результирующих двумерных рентгенограммах сильно поглощающие ткани могут скрывать другие структуры, лежащие на той же линии визирования между рентгеновским источником и детектором. Из-за этого при маммографических исследованиях стали применять также методы трехмерной томографии, которые подразумевают получение рентгенографических изображений под несколькими углами.
Маммография может проводиться с использованием процедуры трехмерной томографической реконструкции, при которой получают несколько двумерных рентгенографических проекционных изображений груди под различными углами проецирования, например, в диапазоне±15 градусов от вертикальной оси, и на основе которых при помощи известных алгоритмов может быть реконструировано томографическое изображение. Выполнение реконструкции требует наличия достаточно точного представления трехмерной проекционной геометрии, описывающей относительное местоположение рентгеновского источника, детектора и сетки изображения, используемых для реконструкции.
Как сказано выше, на основе набора двумерных рентгенографических проекционных изображений при помощи соответствующих алгоритмов может быть реконструировано трехмерное изображение. Такой метод формирования изображений как правило называют цифровой томографической реконструкцией груди (digital breast tomosynthesis, DBT), и в нем используют ограниченный угол томографии и сравнительное небольшое число рентгеновских проекционных изображений, но при этом, с другой стороны, необходимо высокое пространственное разрешение двумерного снимка для обнаружения микрокальцификаций.
Типовой современный цифровой маммограф включает несущую стойку и Сообразный держатель или аналогичный элемент, который может поворачиваться относительно стойки. В С-образном держателе размещены рентгеновский источник с одной стороны и детектор излучения - на противоположной стороне. Визуализируемую грудь помещают, как правило, вблизи детектора и зажимают между пластинами на время, необходимое для облучения рентгеном. Рентгеновский источник, как правило, имеет относительно большую массу, что усложняет механическую конструкцию маммографов. Относительно большая масса делает более выгодной стратегию получения рентгеновских проекционных изображений, при которой С-образный держатель движется непрерывно по своей траектории, поскольку это позволяет как устранить механические вибрации при ускорении и замедлении С-образного держателя, так и избежать недопустимо длительного рентгеновского облучения. Однако такой подход требует короткого времени выдержки для отдельных рентгеновских снимков, менее порядка 50 мс, чтобы изображения не были смазаны из-за перемещения, а это, в свою очередь, требует применения достаточно мощных рентгеновских источников, что увеличивает массу и сложность механического конструирования.
При формировании изображений DBT, на которых размеры исследуемых структур крайне малы, необходимо иметь очень точное представление трехмерной геометрии системы формирования изображений, которая описывает местоположения рентгеновского источника и рентгеновского детектора относительно сетки изображения, используемой для томографической реконструкции. В частности, пространственное разрешение реконструированного изображения сильно зависит от согласованности и точности геометрии формирования изображений, используемой в качестве входных данных алгоритма реконструкции. Это требует либо высокоточной механики, способной в точности воспроизводить расчетную траекторию формирования изображения, либо метода калибровки, который позволяет регулярно (предпочтительно, для каждого отдельного снимка) измерять или вычислять фактическую форму траекторий рентгеновского источника и детектора относительно регистрируемой зоны визуализации. В отличие от устройств конусно-лучевой компьютерной томографии (СВСТ), в которых, как правило, процедуры калибровки геометрии проводят лишь время от времени, меньшая стоимость DBT-томографов накладывает дополнительные ограничения на возможную механическую точность подвижных деталей, что делает более предпочтительными решения, основанные на непрерывном измерении или вычислении фактической геометрии формирования изображения, вместо того, чтобы полагаться на проведенную ранее процедуру калибровки. Особенный клинический и коммерческий интерес представляют решения, позволяющие модернизировать существующие цифровые маммографы, дополняя их возможностями DBT-томографии без изменения базовой механической конструкции. Это еще более усиливает потребность в возможности контроля геометрии формирования изображения, которую фактически реализует устройство.
Для решения проблемы, связанной с неточностью геометрии, были разработаны различные вычислительные подходы. В литературе описаны подходы, в которых виртуальное перемещение рентгеновского источника и рентгеновского детектора посредством жесткого геометрического преобразования в неподвижной системе координат применяется для моделирования и компенсации жесткого перемещения во время формирования проекционного изображения. В современных подходах, предложенных для медицинской томографии, подобные геометрические преобразования оптимизируют, максимизируя резкость результирующей реконструкции. Как правило, такую процедуру коррекции выполняют итеративно.
В случае DBT томографии применение неподвижной системы координат для моделирования и компенсации геометрических погрешностей или движений пациента не является идеальным решением, поскольку собственные геометрические степени свободы в такой системе координат не разделены. Специфика DBT-томографов заключается в том, что рентгеновские лучи расходятся, образуя пирамидальный конус. Следовательно, сдвиг вдоль центрального луча (isoray), соединяющего рентгеновский источник и центр рентгеновского детектора, повлияет лишь на коэффициент увеличения, тогда как сдвиг в плоскости, параллельной пиксельной матрице рентгеновского детектора, даст максимальный сдвиг визуализируемого объекта в его проекционном изображении. Кроме того, предотвращение результирующего преобразования (net transformation), возникающего в результате применения геометрической коррекции, существующими средствами жесткого совмещения результирующей скорректированной DBT-реконструкции и не скорректированной DBT-реконструкции вычислительно очень затратно, в особенности если его повторяют многократно в процессе геометрической коррекции.
Для удовлетворения высоких требований к точности геометрии DBT-томографии были предложены специальные подходы. Одним из них является введение в достаточной степени рентгено-непроницаемых или рентгено-проницаемых реперных объектов в область визуализации DBT-томографа. На основе позиции реперных объектов в проекционных рентгеновских изображениях можно восстановить фактическую геометрию рентгеновского проецирования и ввести эту информацию в процедуру реконструкции изображения DBT. Однако стоимость изготовления подобных прецизионных реперных меток является значительной, требования их видимости в проекционных рентгеновских изображениях ограничивает возможную область визуализации, а результирующее геометрическое представление не позволяет учесть движений пациента относительно томографа и реперных меток, например, из-за дискомфорта, дыхания или сердцебиения, которые могут иметь место, даже несмотря на то, что грудь пациента остается зажатой и по существу неподвижной во время формирования проекционного рентгеновского изображения.
Краткое описание изобретения
В одном из вариантов осуществления предложенной процедуры получения уточненной оценки фактической геометрии формирования изображения, соответствующей измеренным проекционным рентгеновским изображениям, применяют управляемый данными алгоритм, в котором используют внутреннюю вращающуюся систему координат, привязанную к пространственным позициям и ориентации рентгеновского источника и рентгеновского детектора. Результирующее преобразование в неподвижной опорной системе координат предотвращают путем вычисления этого результирующего преобразования и его вычитания непосредственно из оцененных параметров корректирующего геометрического преобразования. В результате, на основе содержимого проекционных рентгеновских изображений ретроспективно оценивают и уточняют позицию систем рентгеновского источника и рентгеновского детектора относительно пациента, или наоборот. Цель процедуры коррекции - повысить качество результирующего изображения путем повышения геометрической согласованности регистрируемых рентгеновских изображений и, в свою очередь, лучше удовлетворить требования к качеству реконструированных изображений. Внутренняя система координат позволяет задать применяемые геометрические степени свободы в соответствии с их относительной важностью как для процедуры коррекции, так и для качества результирующего изображения.
Предложенная процедура может принимать на вход данные, которые обычно требуются для реконструкции изображений: набор проекционных рентгеновских изображений и оценку проекционной геометрии, соответствующую пространственным позициям рентгеновского источника и рентгеновского детектора во время получения проекционных рентгеновских изображений. Аналогично соответствующим методам, сначала вычисляют промежуточную реконструкцию с использованием приближенной проекционной геометрии. Затем устанавливают корректирующее геометрическое преобразование, которое повышает степень геометрического соответствия (согласованности) каждого рассматриваемого проекционного рентгеновского изображения с остальными проекционными рентгеновскими изображениями, с использованием преобразования, соответствующего виртуальному перемещению рентгеновского источника и рентгеновского детектора во время получения изображения. В частности, для определения корректирующего геометрического преобразования применяют вращающуюся координатную систему для каждого проекционного изображения. Процедура коррекции, включающая вычисление промежуточной реконструкции с использованием текущей оценки проекционной геометрии и последующую оптимизацию корректирующих преобразований, может итеративно повторяться заданное число раз. После установления корректирующих геометрических преобразований вычисляют финальную DBT-реконструкцию с использованием проекционных рентгеновских изображений и финальной оценки проекционной геометрии, соответствующего корректирующим преобразованиям.
В еще одном из вариантов целью изобретения и предпочтительных вариантов его осуществления является обеспечение возможности выполнения трехмерной томографической реконструкции на основе индивидуальных двумерных проекционных рентгеновских изображений, формируемых цифровым маммографом, при помощи ретроспективного определения фактически воспроизведенной геометрии формирования изображений для каждого проекционного изображения в связке с процедурой реконструкции изображения. Настоящее изобретение позволяет получать точное представление геометрии формирования изображений без применения калибровочных процедур с реперными метками, а также позволяет использовать существующие цифровые маммографы, механическая точность которых ограничена их исходным предназначением для получения двумерных маммограмм, и которые не способны точно воспроизводить заданную траекторию рентгеновского облучения или точно измерять позиции рентгеновского источника и рентгеновского детектора. Таким образом, предпочтительные варианты осуществления настоящего изобретения включают обновление программного обеспечения существующих цифровых маммографов для их применения также для формирования изображений трехмерной томографической реконструкции.
В настоящем изобретении перед процедурой реконструкции финального DBT-изображения применяют процедуру автокалибровки. В этой процедуре калибровки применяют управляемый данными алгоритм оценки движения для обеспечения геометрической согласованности между полученными проекционными рентгеновскими изображениями, начиная с начальной оценки проекционной геометрии, которая отражает приблизительную геометрическую форму траектории рентгеновского экспонирования. По сути, на основе данных проекционных рентгеновских изображений, ретроспективно оценивают позиции рентгеновского источника и рентгеновского детектора относительно пациента и реконструированного изображения. Хотя предполагается, что при формировании DBT-изображений основным источником геометрических погрешностей и несогласованности между проекционными рентгеновскими изображениями является точность воспроизведения траектории рентгеновского экспонирования, предложенный подход позволяет также корректировать любые движения пациента, которые могут иметь место, даже несмотря на то, что исследуемая грудь обычно зажата при формировании изображения. Учитывая высокие требования к точности, являющиеся следствием малых физических размеров регистрируемых структур, это является безусловным преимуществом по сравнению с подходами, в которых применяют калибровку на основе реперных меток, которые регистрируют только позицию рентгеновского источника относительно рентгеновского детектора, но не позицию пациента.
Предложенная процедура автокалибровки включает измерение набора маммографических проекционных рентгеновских изображений, передачу изображений в рабочую станцию реконструкции, формирование начальной оценки проекционной геометрии, соответствующей каждому из проекционных рентгеновских изображений, вычисление промежуточной DBT-реконструкции и итеративное установление набора параметров жесткого преобразования для каждого из проекционных рентгеновских изображений с целью уточнения начальной оценки проекционной геометрии. Применение жесткого преобразования соответствует виртуальному перемещению рентгеновского источника и рентгеновского детектора, что приводит их в соответствии с фактическим наблюдаемым содержимым проекционных рентгеновских изображений. Это реализуют с использованием собственно данных измерений для адаптивного определения геометрии формирования изображений.
Предложенную процедуру автокалибровки предпочтительно выполняют итеративно, так, что перед каждой итерацией реконструируют промежуточное DBT-изображение. Затем для каждого из измеренных проекционных рентгеновских изображений вычисляют изображение реконструированной цифровым путем рентгенограммы (digitally reconstructed radiograph, DRR) на основе DBT-реконструкции, соответствующей каждому вычисленному набору параметров жесткого преобразования. Пригодность параметров преобразования, т.е. пригодность кандидата для виртуального перемещения рентгеновского источника и рентгеновского детектора, оценивают при помощи измерения сходства вычисленного DRR-изображения и физически измеренного проекционного рентгеновского изображения. Последующая за этим оптимизация параметров жесткого преобразования основана на нахождении экстремума меры сходства между измеренным проекционным рентгеновским изображением и соответствующим вычисленным проекционным изображением DRR, как функции параметров жесткого преобразования. Процедуру итеративно выполняют необходимое количество раз, при этом параметры жесткого преобразования для каждого проекционного рентгеновского изображения используют в следующей итерации для вычисления обновленной промежуточной DBT-реконструкции, а также в качестве начальной оценки для последующей оптимизации параметров.
Преимущества рассмотренных здесь вариантов осуществления настоящего изобретения включают улучшение соответствия проекционной геометрии, что дает результатом повышение качества изображения в отношении резкости, уровня детализации и контраста. Дополнительное преимущество заключается в потенциальной возможности исключить повторные сканирования из-за связанного с проекционной геометрией снижения качества изображения, благодаря чему может быть снижена доза радиации, получаемая пациентом.
При маммографии предложенная процедура автокалибровки может быть особенно полезной, так как позволяет модернизировать существующие цифровые маммографы, добавляя функцию трехмерной томографической реконструкции. Трехмерная томографическая реконструкция повышает вероятность раннего обнаружения рака груди и повышает доступность маммографов с томографической реконструкцией. Еще одно преимущество заключается в возможности коррекции не только механических погрешностей, но и даже малых перемещений пациента во время формирования проекционного изображения, что невозможно, например, при применении фиксированных наборов калибровочных реперных меток.
Краткое описание чертежей
Приложенные чертежи позволяют получить полное понимание предложенного способа компенсации движений пациента. На чертежах:
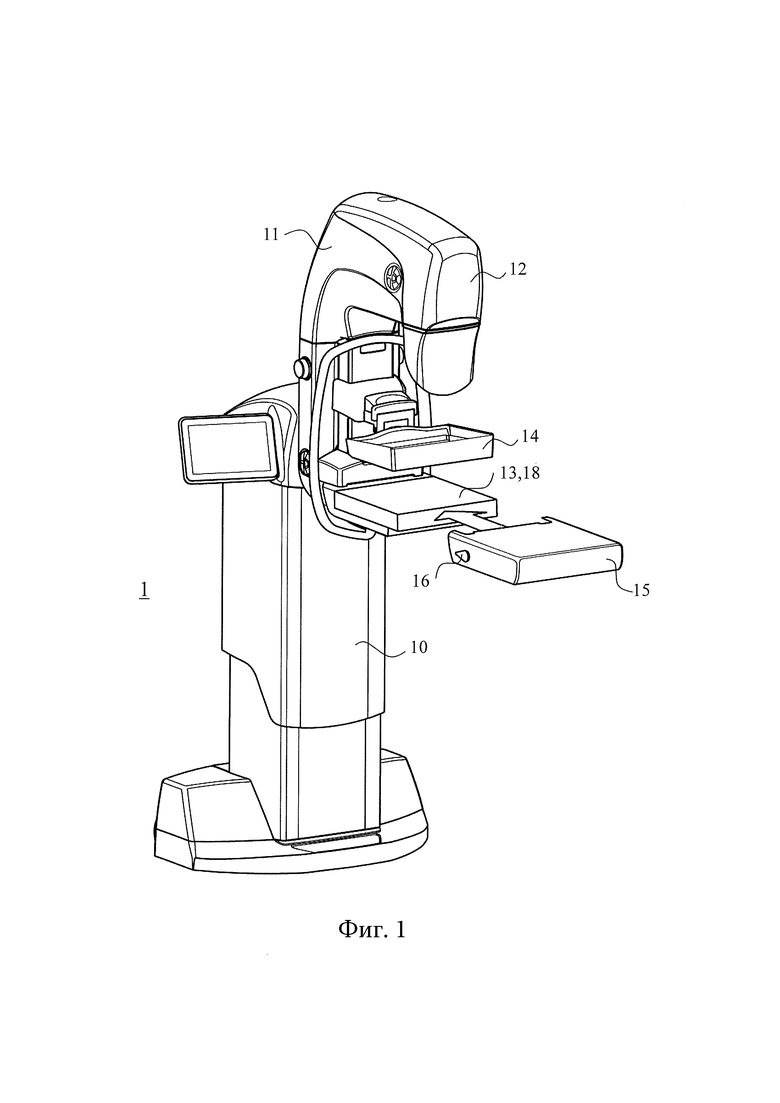
На фиг. 1 показан пример типового маммографа.
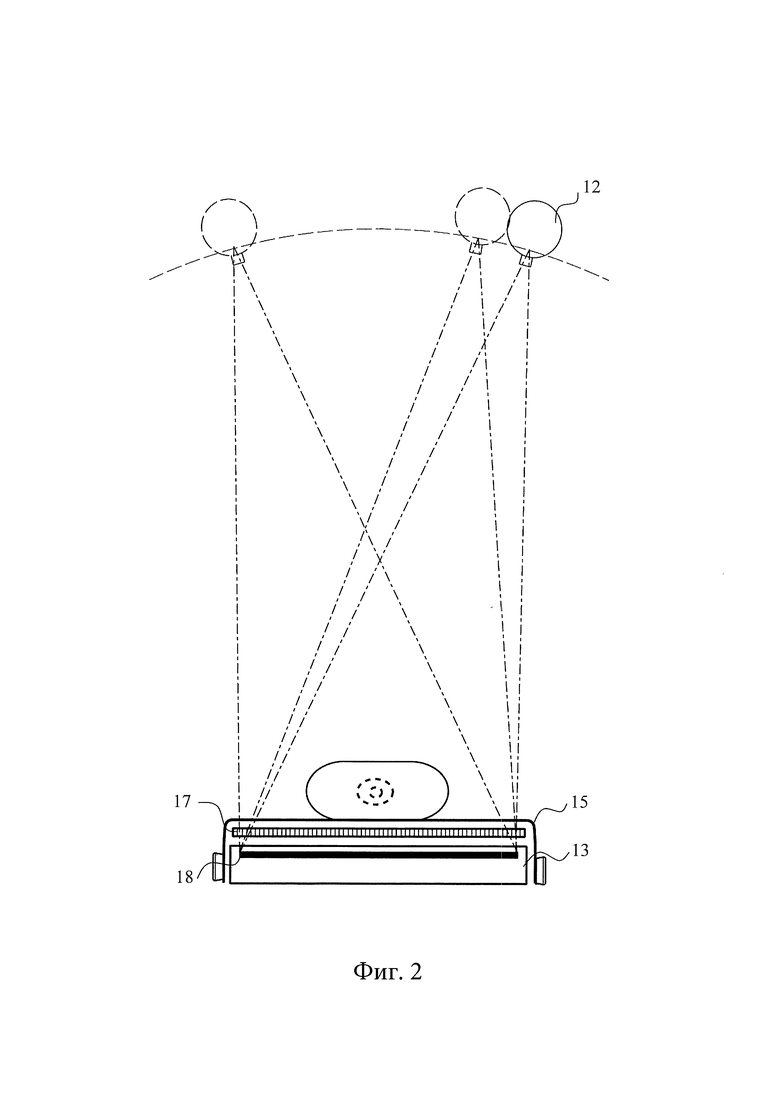
На фиг. 2 проиллюстрирован принцип формирования изображений томографической реконструкции.
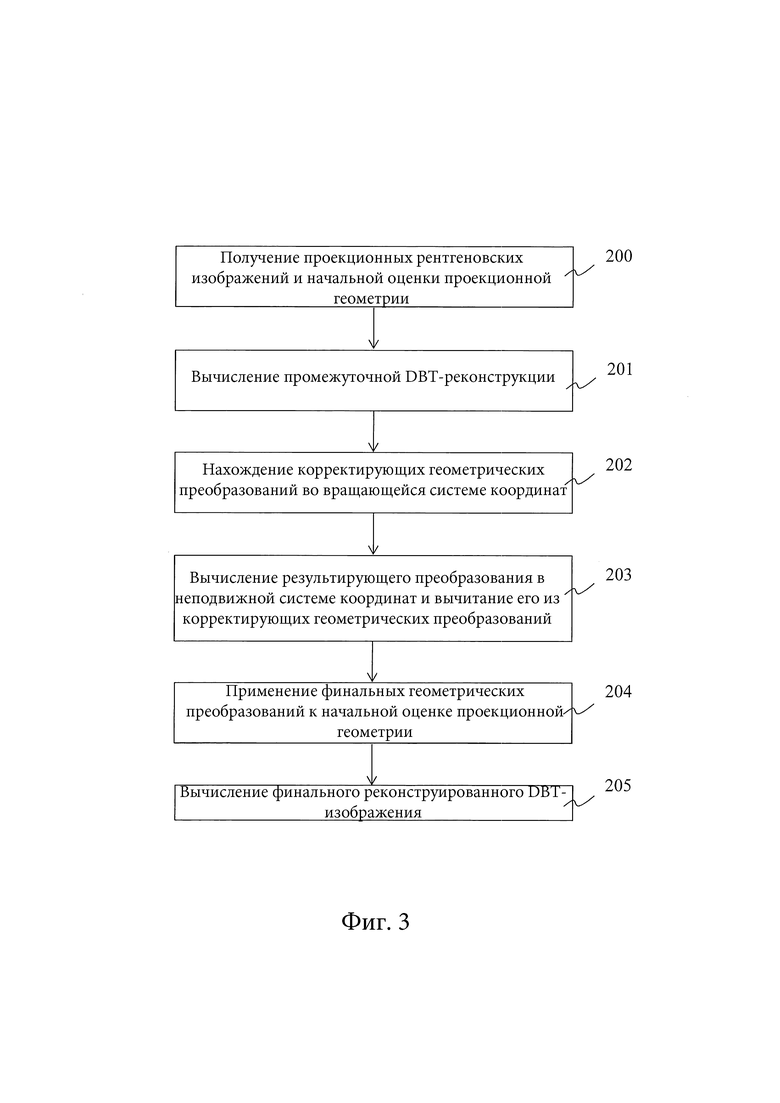
На фиг. 3 показана блок-схема алгоритма для одного из вариантов осуществления способа компенсации движений пациента.
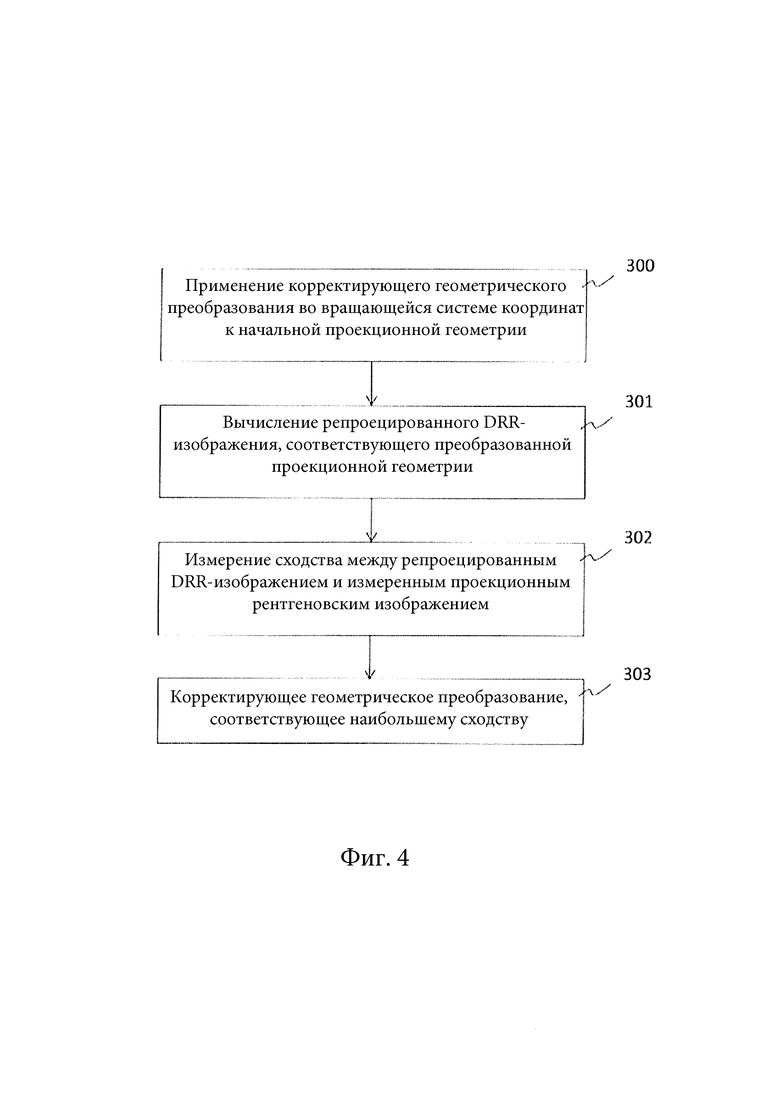
На фиг. 4 показана блок-схема алгоритма с подробным описанием шага 202, показанного на фиг. 3.
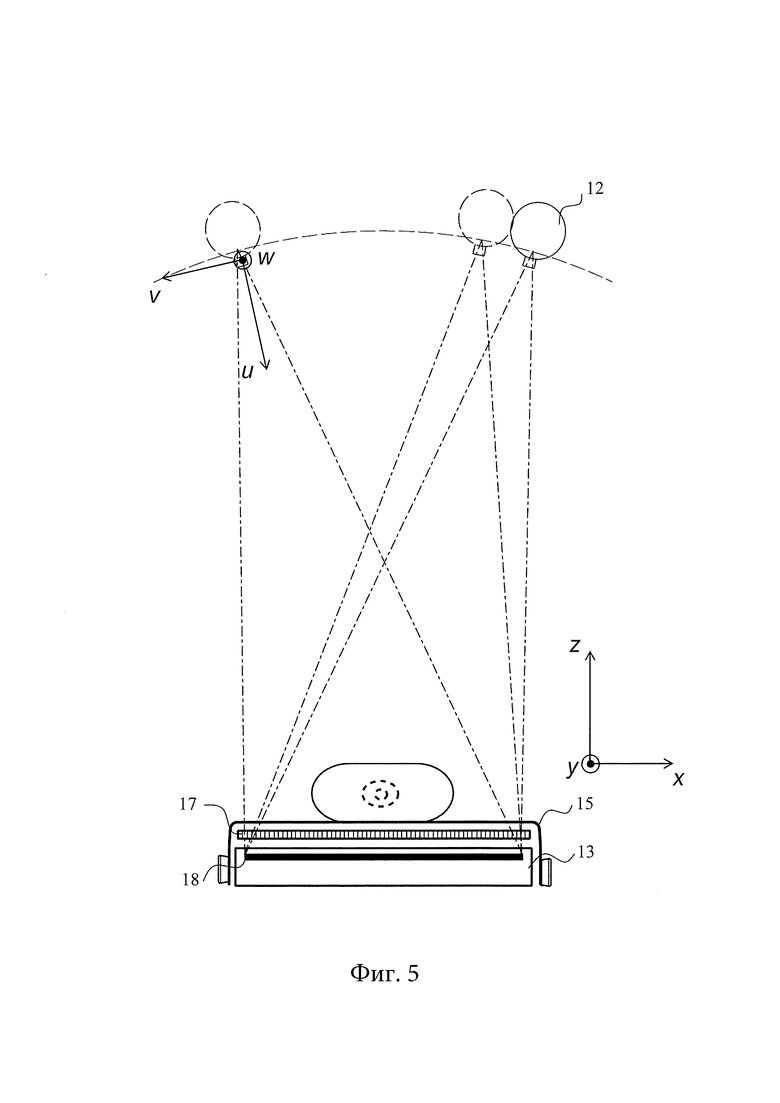
На фиг. 5 проиллюстрированы неподвижная система координат и вращающаяся система координат, применяемые для формирования изображений томографической реконструкции.
Подробное описание изобретения
Типичное описание проекционной геометрии состоит из позиций фокуса рентгеновского источника и центра рентгеновского детектора в трехмерном пространстве, а также информации, достаточной для однозначного определения ориентации рентгеновского детектора. Такая информация может включать, например, углы поворота в базовой системе координат, который определяет направления вертикальной и горизонтальной осей пиксельной матрицы детектора. Описание проекционной геометрии, как правило, основано на знании физических размеров устройства формирования изображений, а также идеальных траекторий экспонирования, соответствующих заданной программе формирования изображений. При этом, чтобы обеспечить приемлемую точность проекционной геометрии, периодически выполняют процедуру калибровки.
Базовым допущением, используемым в процессе реконструкции, является то, что исследуемые анатомические структуры оставались достаточно неподвижными во время получения проекционных рентгеновских изображений. Это связано с тем, что проекционные рентгеновские изображения должны представлять собой совместно зарегистрированные результаты измерения неподвижного объекта, которые потом могут быть без противоречий скомбинированы для реконструкции структуры объекта. Систематическая погрешность в проекционной геометрии может быть компенсирована периодическими процедурами калибровки, которые устраняют влияние отклонений от предполагаемой идеальной траектории формирования проекционных рентгеновских изображений.
Более сложная проблема возникает, если пациент двигается во время формирования изображений: такие перемещения носят непредсказуемый и случайный характер. Несмотря на то, что это отчасти предотвращается путем удержания пациента на месте во время формирования изображения, сравнительно большая длительность формирования проекционных рентгеновских изображений при DBT-реконструкции, порядка 10 секунд, делает практически невозможным полностью исключить движения пациента. При этом пожилые пациенты, обычно проходящие маммографические обследования, испытывают особые трудности с сохранением неподвижности во время формирования изображения.
В случае значительного смещения пациента во время получения проекционных рентгеновских изображений, в реконструированном изображении появляются заметные артефакты в виде полос или размытости, которые в худшем случае могут сделать изображение непригодным для медицинских целей. Повторное экспонирование может дать лучший результат, однако пациент получает дополнительную дозу радиации. В предложенном ретроспективном подходе для компенсации негативного влияния нежелательных перемещений пациента сначала вычисляют промежуточную реконструкцию с использованием двумерных проекционных рентгеновских изображений и приближенной геометрии формирования изображений. Промежуточная реконструкция может вычисляться с меньшим разрешением, чем обычно используемое для диагностических реконструкций. Промежуточная реконструкция агрегирует в себе информацию из всех проекционных рентгеновских изображений, при этом внешний вид реконструкции отражает взаимную геометрическую согласованность измеренных двумерных проекционных рентгеновских изображений.
Оптимизация геометрии для каждого проекционного изображения основана на измерении сходства физических проекционных рентгеновских изображений и соответствующих репроецированных данных промежуточной реконструкции, которые образуют восстановленную цифровым путем рентгенограмму (DRR). Это связано с тем, что, когда оценка геометрии формирования изображений является согласованной, реконструированное изображение, которое по определению соответствует результатам измерений, передаваемых проекционными изображениями прямой проекции, должно давать репроекции, в значительной степени сходные с данными измерений. В случае же геометрической рассогласованности, репроекция промежуточной реконструкции будет расходиться с измеренной проекцией. Поскольку в промежуточной реконструкции агрегированы все проекционные изображения, ее репроекция отражает сумму всех проекционных изображений, и сходство измеренного проекционного рентгеновского изображения и проекционных изображений прямой проекции будет максимальным, когда соответствующая геометрия репроекции соответствует средней точной проекционной геометрии промежуточной реконструкции.
Как правило, в DBT-томографе рентгеновские лучи расходятся, образуя пирамидальный конус. Сдвиг вдоль центрального луча, соединяющего рентгеновский источник и центр рентгеновского детектора, влияет лишь на коэффициент увеличения, тогда как сдвиг в плоскости рентгеновского детектора дает максимальный сдвиг визуализируемого объекта в его проекционном изображении. По этой причине в предложенном подходе применяют вращающуюся систему координат, которая привязана к физическим позициям и ориентациям рентгеновского источника и рентгеновского детектора во время формирования изображения. А именно, в качестве одной из осей выбирают центральный луч, соединяющий рентгеновский источник с центром пиксельной матрицы рентгеновского детектора, а в качестве двух остальных перпендикулярных осей линии, совпадающие с ортогональной проекцией пиксельной матрицы рентгеновского источника на плоскость, перпендикулярную упомянутому центральному лучу. Путем ограничения геометрических преобразований проекционной геометрии осями этой внутренней системы координат для каждого проекционного изображения, становится возможным разделить геометрические степени свободы, с различной степенью влияющие на геометрическую точность.
В результате того, что каждое проекционное рентгеновское изображение подвергают индивидуальному геометрическому преобразованию, возможно, что результирующее среднее преобразование будет давать результирующий эффект для реконструированного изображения. Он выражается, например, в глобальном результирующем сдвиге или повороте реконструированной анатомической структуры по сравнению с нескорректированной анатомией. Такое результирующее преобразование анатомической структуры может негативно влиять на степень применимости реконструированного изображения. Соответственно, предложен также способ компенсации результирующего преобразования. Результирующее преобразование может быть вычислено путем отображения преобразований, соответствующих каждому преобразованному проекционному изображению, из вращающейся системы координат в неподвижную. К примеру, допустим, что каждое из проекционных изображений смещено только по своей горизонтальной оси, тогда соответствующие смещения в неподвижной системе координат могут быть вычислены на основе известных горизонтальных осей вращающихся систем координат, специфичных для каждой проекции, и в качестве результирующего смещения в неподвижной системе координат может быть взято среднее значение. При помощи инверсии описанного выше отображения, результирующее преобразование может быть отображено обратно во вращающиеся системы координат и вычтено из преобразования для каждой проекции. В результате результирующее преобразование в неподвижной системе координат устраняется.
В процедуре оптимизации качество корректирующего геометрического преобразования для каждого заданного проекционного рентгеновского изображения измеряют как сходство изображения прямой проекции, соответствующего преобразованной проекционной геометрии, и исходного проекционного рентгеновского изображения. Сходство репроекции и рентгеновской проекции может быть измерено, например, как среднеквадратическая разность изображений, коэффициент корреляции или градиентный коэффициент корреляции. Получив оптимальное (в отношении меры сходства) геометрическое преобразование для каждого проекционного изображения, можно получить промежуточную DBT-реконструкцию, найдя экстремум меры сходства между изображением прямой проекции и проекционным рентгеновским изображением как функцию параметров геометрического преобразования.
Процедура оптимизации затем включает вычисление промежуточной DBT-реконструкции с использованием начальной оценки проекционной геометрии; доступ ко всем или к подмножеству измеренных проекционных рентгеновских изображений; (для каждого проекционного изображения, к которому осуществляют доступ) получение коррекционного преобразования путем нахождения максимума сходства между измеренным проекционным рентгеновским изображением и соответствующей прямой проекцией промежуточной реконструкции как функции параметров геометрического преобразования, выполненного во вращающейся системе координат; вычисление результирующего преобразования в неподвижной базовой системе координат и вычитание соответствующего преобразования из параметров преобразования во вращающейся системе координат; и вычисление финальной реконструкции, когда определено, что получен достаточный результат коррекции.
На фиг. 1 показана типовая конструкция цифрового маммографа. Маммограф (1) на фиг. 1 состоит из опорной стойки (10) и закрепленного на ней С-образного держателя (11) (в более общем случае, держателя (11) иного типа). В верхней части С-образного держателя (11) под кожухом размещен источник (12) рентгеновского излучения, который сконфигурирован для формирования рентгеновского луча, проходящего через верхнюю компрессионную пластину (14) маммографа (когда она установлена в устройстве) и попадающего на рентгеновский детектор (18), размещенный в корпусе (13) детектора. Корпус (13) детектора, или соответствующую ему конструкцию, размещают, как правило, внутри нижнего лотка (15), в который может быть встроена сетчатая структура (17) для поглощения излучения, рассеиваемого визуализируемым объектом. Нижний лоток (15) может быть как жестко закреплен на устройстве, так и быть съемным. Поверхность нижнего лотка (15), как правило, служит платформой для размещения исследуемой груди, поэтому эту деталь также называют нижней компрессионной пластиной. В решении, показанном на фиг. 1, нижний лоток (15) оснащен соединительными элементами (16), обеспечивающими съемное соединение нижнего лотка с маммографом (1).
Современные цифровые маммографы обычно моторизованы, так что С-образный держатель (11) может перемещаться по вертикали и поворачиваться вокруг оси, которая, как правило, является горизонтальной осью, соединяющей С-образный держатель (11) со стойкой (10) устройства. С-образный держатель (11) может состоять из двух частей, и, соответственно, основная конструкция аппарата может включать либо по существу вертикальную стойку (10), либо часть (10) рамы, которая закреплена, например, на стене или потолке, и конструкцию держателя (10), связанную с ней, которая выполнена с возможностью поворота вокруг горизонтальной оси вращения. При этом снаружи на противоположных концах держателя (11) размещены источник (12) излучения, находящийся по существу на первом конце и имеющий точку фокуса, и средства (18) приема данных изображения на втором конце. Конструкция держателя (11) может обеспечивать возможность независимого поворота первого конца и/или второго конца держателя (11) вокруг горизонтальной оси вращения. Система может дополнительно включать средства управления, включающие средства записи информации и средства обработки информации, связанной с формированием изображений, в частности, для обработки информации изображений.
На фиг. 2 показан принцип типовой томографической реконструкции, при осуществлении которой получают отдельные рентгеновские снимки груди под различными углами проекции, например, в диапазоне углов ±15 градусов от вертикальной оси. На фиг. 2 проиллюстрирована схема, в которой отклоняется только позиция источника (12) излучения относительно исследуемой груди, однако также известны системы, в которых С-образный держатель (11) поворачивается целиком, то есть грудь остается на месте, а детектор (18) следует за движением источника (12) излучения с противоположной стороны от исследуемой груди. Предложенный метод автокалибровки применим для обеих схем.
На фиг. 3 показаны, для одного из вариантов осуществления настоящего изобретения, шаги для компенсации движений пациента, которые могут применяться, например, для обработки изображений, полученных при помощи системы формирования изображений, проиллюстрированной на фиг. 1. Способ основан на нахождении корректирующих геометрических преобразований для начальной оценки проекционной геометрии во вращающейся системе координат, привязанной к позициям рентгеновского источника 105 и рентгеновского детектора 109.
На шаге 200 способа, показанного на фиг. 3, получают входные данные, включающие измеренные проекционные рентгеновские изображения и начальную оценку проекционной геометрии, соответствующую процессу получения изображений. Проекционная геометрия определяет предполагаемую ориентацию рентгеновского детектора 109. Форма проекционной геометрии обычно основана на процедуре геометрической калибровки, для которой применяют, например, эталонную модель части тела с рентгеноконтрастными метками.
На шаге 201 с использованием входных данных, полученных на шаге 200, вычисляют промежуточную реконструкцию, которую используют для оптимизации проекций. Могут использоваться версии входных данных с пониженным разрешением, поскольку, как правило, столь же высокое разрешение, как в изображениях, используемых непосредственно для диагностики, не требуется. Подразумевается, что в промежуточной реконструкции агрегирована вся доступная физическая и геометрическая информация, полученная в процессе измерений на шаге 200. В случае наличия геометрической несогласованности, она проявляется в промежуточной реконструкции, например, в виде нерезкости реконструированных деталей.
На шаге 202 устанавливают корректирующие геометрические преобразования во вращающейся системе координат. Цель геометрических преобразований компенсировать внутреннюю геометрическую несогласованность начальной оценки проекционной геометрии. Шаг 202 подробно описан ниже на примере фиг. 4, однако, в более общем виде, корректирующее геометрическое преобразование находят путем поиска оптимального геометрического преобразования. Оптимальность преобразования определяют путем назначения ему значения сходства. Значение сходства вычисляют при помощи сравнения реконструированной цифровым путем репроецированной рентгенограммы (DRR) для промежуточного реконструированного изображения с соответствующим измеренным проекционным рентгеновским изображением с использованием проекционной геометрии, соответствующей вычисленному геометрическому преобразованию. Более высокое значение сходства рассматривают как указание на более оптимальное корректирующее геометрическое преобразование. Применение вращающейся системы координат для геометрического преобразования позволяет разделить геометрические степени свободы согласно их вкладу в погрешность для проекционной геометрии, имеющей форму конуса.
На шаге 203 вычитают результирующее геометрическое преобразование в неподвижной системе координат. Фиксированная система координат задана, как правило, в привязке к неподвижным деталям устройства формирования изображений. Результирующее геометрическое преобразование вычисляют путем линейного преобразования геометрических преобразований, полученных на шаге 202, из вращающейся системы координат в неподвижную. Линейное преобразование может быть получено непосредственно на основе известных координатных осей вращающейся и неподвижной систем координат. После нахождения результирующего преобразования его инверсию линейно преобразуют из неподвижной системы координат во вращающуюся систему координат. Инверсия результирующего преобразования в этом случае соответствует набору параметров геометрического преобразования для каждого проекционного изображения во вращающейся системе координат. Сложение этих значений со значениями геометрических параметров, полученных на шаге 202, дает компенсацию результирующего преобразования в неподвижной системе координат.
На шаге 204 значения параметров преобразования, полученные на шаге 203, применяют к начальной оценке проекционной геометрии и получают скорректированную оценку проекционной геометрии. В частности, шаги 201-203 могут повторяться итеративно множество раз перед переходом к шагу 204.
На шаге 205 вычисляют финальную DBT-реконструкцию с использованием скорректированной оценки проекционной геометрии. Финальную реконструкцию вычисляют обычным образом, за исключением случая, когда шаги 201-204 не применялись, и начальная оценка проекционной геометрии не была заменена на скорректированную оценку, полученную на шагах 201-204.
На фиг. 4 показано, в качестве одного из примеров, подробное описание шага 202, соответствующего фиг. 3. На шаге 300 вычисленное геометрическое преобразование применяют к исходной геометрии проекционного изображения во вращающейся системе координат. Снова, система координат привязана к пространственным позициям и ориентации рентгеновского источника и рентгеновского детектора во время физического получения соответствующего проекционного изображения. Применение преобразования во вращающейся системе координат включает линейное отображение из неподвижной системы координат, в которой, как правило, задана геометрия формирования изображений, во вращающуюся систему координат, в которой выполняют преобразование, после чего следует обратное линейное отображение из вращающейся системы координат в неподвижную систему координат. В качестве простого примера получаемого результата, в случае применения параллельного переноса вдоль оси, соответствующей горизонтальной оси рентгеновского детектора, то есть ее проекции на плоскость, перпендикулярную центральному лучу, исходную проекционную геометрию проекционного изображения отображают во вращающуюся систему координат, смещают вдоль этой оси вращающейся системы координат на заданное расстояние, что соответствует виртуальному перемещению рентгеновского источника и рентгеновского детектора, и затем отображают обратно в неподвижную систему координат. Преобразованную проекционную геометрию выражают в неподвижной системе координат, и полученную преобразованную проекционную геометрию используют в качестве входных данных для следующего шага 301.
На шаге 301 вычисляют репроецированное DRR-изображение для промежуточной DBT-реконструкции, вычисленной на шаге 201, с использованием преобразованной проекционной геометрии, полученной на шаге 300. Вычисление DRR-изображения может быть выполнено с использованием стандартного алгоритма, например, метода трассировки лучей Сиддона. В типовом алгоритме репроекции входные данные алгоритма состоят из конечных точек представления рентгеновских лучей и изображения источника, для которого вычисляют DRR-изображения, включая знания о пространственной позиции и ориентации, выраженные в одной и той же системе координат. В рассматриваемом случае такая система координат соответствует неподвижной системе координат. В результате геометрического преобразования, применяемого на шаге 300, меняются конечные точки путей каждого из виртуальных рентгеновских лучей через промежуточную реконструкцию, что распространяет эффект геометрического преобразования на полученное DRR-изображение.
На шаге 302 оценивают сходство между DRR-изображением, полученным на шаге 301, и проекционным рентгеновским изображением, полученным на шаге 200. Мера сходства основана на по-точечном сравнении изображений с помощью известных методов, например, среднеквадратической разности изображений или их взаимной корреляции. В предложенном способе не имеет значения, какая именно мера будет использована для оценки сходства. Полученное значение сходства назначают геометрическим параметрам, поданным на вход шага 300. Более высокое значение сходства рассматривают как указание на более подходящие параметры геометрического преобразования.
На шаге 303 находят оптимальные параметры геометрического преобразования путем нахождения параметров, соответствующих наивысшему значению сходства, полученного применением шагов 300-302. В типовом случае шаги 300-302 итеративно оценивают посредством соответствующего алгоритма минимизации, например, симплекс-метода Нелдера-Мида, и получают оптимальные параметры геометрического преобразования. Эти параметры сохраняют и назначают конкретному проекционному изображению. Затем они могут измениться при повторении шагов 201-203.
На фиг. 5 проиллюстрирована вращающаяся система координат, применяемая на шаге 202. В DBT-томографе конструкция (11) держателя, например, показанная на фиг. 1, обычно содержит рентгеновский источник (12) и рентгеновский детектор (18). При формировании DBT-изображений специфика заключается в том, что рентгеновские лучи расходятся, образуя пирамидальный конус. Сдвиг вдоль центрального луча, соединяющего рентгеновский источник (12) и центр рентгеновского детектора (18), влияет лишь на коэффициент увеличения, тогда как сдвиг, соответствующий осям пиксельной матрицы рентгеновского детектора, дает максимальный сдвиг визуализируемого объекта в его проекционном изображении. По этой причине в предложенном подходе применяют вращающуюся систему координат uvw, которая привязана к физическим позициям и ориентациям рентгеновского источника и рентгеновского детектора во время формирования изображения. Путем ограничения геометрических преобразований проекционной геометрии осями этой внутренней системы координат для каждого проекционного изображения, становится возможным разделить геометрические степени свободы, с различной степенью влияющие на геометрическую точность. Неподвижная система координат, в которой вычисляют результирующее преобразование, обозначена как система координат xyz.
При выборе оси и системы координат, совпадающей с центральным лучом, направленным от рентгеновского источника (12) в центр рентгеновского детектора (18), и оси v, совпадающей с проекцией горизонтальной оси пиксельной матрицы рентгеновского детектора (18) на плоскость, перпендикулярную центральному лучу, степени свободы, например, для жесткого преобразования, будут следующими:
1. Продольный сдвиг параллельно центральному лучу (ось u); 2. Поперечный сдвиг вдоль проекции горизонтальной оси пиксельной матрицы рентгеновского детектора (ось v); 3. Вертикальный сдвиг вдоль проекции вертикальной оси пиксельной матрицы рентгеновского детектора (ось w); 4. Поворот вокруг оси u (угол крена); 5. Поворот вокруг оси v (угол тангажа); 6. Поворот вокруг оси w (угол рыскания).
Результат предложенного способа компенсации движений пациента заключается в улучшенной оценке проекционной геометрии, соответствующей физическому формированию проекционных рентгеновских изображений и, соответственно, реконструированного DBT-изображения, при этом снижается влияние геометрической несогласованности.
Предпочтительные варианты осуществления настоящего изобретения включают систему маммографии для томографической реконструкции, включающую маммограф (1) который включает по существу вертикальную стойку (10) или часть (10) рамы, которая закреплена, например, на стене или потолке, и конструкцию держателя (10), связанную с ней, которая выполнена с возможностью поворота вокруг горизонтальной оси вращения, при этом снаружи на противоположных концах упомянутой конструкции держателя (11) размещены источник (12) излучения, имеющий точку фокуса и находящийся по существу на первом конце, и средства (18) приема данных изображения по существу на втором конце. В соединении с упомянутым вторым концом конструкции держателя (11) дополнительно установлена конструкция поддона (15), который расположен по существу сверху от средств (18) приема данных изображения. Система также включает средства управления для перемещения по меньшей мере одной из деталей конструкции держателя (11) и для управления работой средств (18) приема данных изображения, а также процессорных средств, которые включают средства записи информации и средства обработки информации.
Процедура формирования изображения томографической реконструкции может начинаться с размещения пациента для получения изображения, что в случае описанной выше системы означает помещение груди на конструкцию (15) нижнего поддона и, возможно, прижатие ее для неподвижности при помощи верхней компрессионной пластины (14). Если конструкция держателя (11) устройства или ее часть, содержащая источник (12) излучения, еще не была перемещена на первый угол проецирования в процедуре формирования изображений, то ее переводят в это положение, после чего система готова к первому экспонированию. Считывают визуальную информацию, регистрируемую детектором (18) в связи с экспонированием, записывают ее и повторяют съемку с малыми интервалами угла проецирования, например, с интервалами в 2 градуса.
Измеренные необработанные данные, соответствующие рентгеновским снимкам, как правило, отражают интенсивность или пропорциональную ей характеристику падающего рентгеновского излучения. К измеренным необработанным изображениям применяют широко известный метод логарифмического преобразования и получают проекционные рентгеновские изображения, которые приблизительно пропорциональны криволинейным пространственным интегралам общего распределения поглощения рентгеновских лучей в исследуемой груди. Предварительная обработка экспонированных рентгеновских изображений может выполняться в устройстве формирования изображений или на рабочей станции для обработки изображений.
После формирования и передачи предварительно обработанных рентгеновских изображений в рабочую станцию обработки изображений или в аналогичный элемент, выполняют итеративную процедуру определения геометрии формирования изображений для каждого рентгеновского снимка. Если рентгеновский детектор неподвижен, то геометрия формирования изображений определяется позицией рентгеновского источника относительно детектора в трехмерном пространстве. Если детектор немного смещается во время экспонирования, то для определения геометрии формирования изображений необходима также позиция детектора. Эти данные нужны также для компенсации движений пациента. В дальнейшем описании принято это допущение. Соответственно, описание проекционной геометрии включает позиции рентгеновского источника (точки фокуса) и детектора, а также ориентацию детектора. Позиции рентгеновского источника описывают в виде точек в трехмерной базовой системе координат.
В ходе итеративной процедуры вычисляют позиции, в трехмерном пространстве, рентгеновского источника (12) и рентгеновского детектора (18), соответствующие экспозиции каждого из проекционных рентгеновских изображений, с использованием заранее заданных оценок их позиций в качестве начального приближения, и затем оптимизируют корректирующее жесткое преобразование, что позволяет получить уточненные оценки, которые максимизируют геометрическое соответствие между каждым измеренным проекционным рентгеновским изображением и остальными измеренными проекционными рентгеновскими изображениями. Следует понимать, что из-за упомянутых выше особенностей, связанных с ограниченной точностью механики и ограниченной точностью позиционирования цифровых маммографов, начальная оценка позиций рентгеновского источника практически всегда неидеальна.
Геометрическое соответствие каждого из проекционных рентгеновских изображений всем остальным проекционным рентгеновским изображениям измеряют, сравнивая его с соответствующей реконструированной цифровым путем рентгенограммой (DRR), вычисленной на основе промежуточного реконструированного DBT-изображения с использованием подходящего алгоритма прямой проекции. DBT-реконструкция может быть вычислена с помощью подходящего алгоритма, например, известного итеративного алгоритма SIRT. Нужно понимать, что в идеальном случае, когда проекционная геометрия заранее известна и идеальное реконструированное изображение может быть вычислено на основе идеально измеренных проекционных изображений с бесконечной точностью, например, в отношении размера элемента изображения и физической модели распространения и регистрации рентгеновских лучей, вычисленные DRR-изображения будут в точности эквивалентны измеренным проекционным рентгеновским изображениям. При этом промежуточная DBT-реконструкция содержит, по существу, всю доступную структурную и геометрическую информацию из всех проекционных рентгеновских изображений. По этой причине применяют итеративный подход, с постепенным уточнением оценки геометрии формирования изображений, что позволяет максимизировать соответствие между измеренным проекционным рентгеновским изображением и вычисленными проекционными изображениями DRR, относящимся к промежуточной томографической реконструкции. Промежуточную DBT-реконструкцию вычисляют, как правило, с меньшим разрешением, чем стандартную DBT-реконструкцию, пригодную для медицинской диагностики. Это позволяет повысить эффективность вычислений в алгоритме компенсации движений, применяемом в предложенной процедуре автокалибровки.
Исходные параметры жесткого преобразования для описания проекционной геометрии каждого проекционного рентгеновского изображения выбирают так, чтобы оно было тождественным преобразованием, оставляющим исходную проекционную геометрию без изменений. В каждой итерации, и для каждого проекционного рентгеновского изображения, находят обновленные параметры преобразования, что позволяет максимизировать геометрическое соответствие между измеренным проекционным изображением и соответствующим вычисленным проекционным изображением DRR в промежуточной DBT-реконструкции. Затем измеряют уровень соответствия, и значит, пригодности каждого из кандидатных жестких преобразований с помощью меры сходства, вычисляемой для измеренного проекционного рентгеновского изображения и вычисленного проекционного изображения DRR.
Итак, шаги 300-304 описывают итеративную оптимизацию параметров жесткого преобразования для каждой проекции в процедуре калибровки, при этом каждая отдельная итерация состоит из этих шагов. Каждая итерация начинается с вычисления промежуточной DBT-реконструкции с использованием измеренных проекционных рентгеновских изображений и текущей оценки проекционной геометрии, заданной начальным приближением и параметрами жесткого преобразования для каждой проекции, которые уникально определяют измененную форму геометрии формирования изображений, шаг 300. В первой итерации параметры преобразования выбирают равными тождественному преобразованию, т.е. нулевому сдвигу или повороту.
Пригодность новых кандидатных значений параметров жесткого преобразования для проекционной геометрии каждого рентгеновского изображения в каждой итерации оценивают, сначала вычисляя соответствующее проекционное изображение DRR для текущей промежуточной DBT-реконструкции. Вычисление проекционного изображения DRR начинается с применения кандидатного жесткого преобразования к начальной оценке проекционной геометрии текущего проекционного изображения: шаг 301. Жесткое преобразование применяют к позициям рентгеновского источника и рентгеновского детектора, которые затем используют для вычисления проекционного изображения DRR.
Когда кандидатное жесткое преобразование применено к проекционной геометрии текущего проекционного рентгеновского изображения, вычисляют DRR-изображение для текущей промежуточной DBT-реконструкции с использованием подходящего алгоритма прямой проекции, шаг 302. Результирующее DRR-изображение однозначно задано DBT-реконструкцией и проекционной геометрией, полученной в результате применения параметров жесткого преобразования к начальной оценке проекционной геометрии.
Пригодность кандидатных значений для параметров жесткого преобразования оценивают, измеряя сходство измеренного проекционного рентгеновского изображения и проекционного изображения DRR, вычисленного с использованием проекционной геометрии, полученной в результате применения упомянутых параметров жесткого преобразования, шаг 303. Сходство оценивают путем вычисления подходящей меры сходства изображений, например, перекрестной корреляции изображений, градиентной корреляции, количества взаимной информации или энтропии разности изображений. Как было пояснено выше, большее сходство между измеренным проекционным рентгеновским изображением и вычисленным DRR-изображением указывает на лучшую пригодность параметров жесткого преобразования.
Оптимизацию параметров жесткого преобразования выполняют путем нахождения экстремума меры сходства между измеренным проекционным рентгеновским изображением и соответствующим вычисленным проекционным изображением DRR как функции параметров жесткого преобразования, шаг 304. Оптимизацию выполняют, итеративно повторяя шаги 301-303 до тех пор, пока не будет выполнено заранее заданное условие. Заранее заданным условием может быть, например, количество циклов итерации или результирующее изменение параметров преобразования для каждой проекции. После нахождения оптимальных параметров жесткого преобразования, соответствующих найденному экстремуму меры сходства проекционных изображений, параметры преобразования сохраняют для использования в последующих итерациях, начинающихся снова с шага 300. Достаточное количество итераций зависит, как правило, от требуемого уровня точности процедуры компенсации движений и точности начальной оценки. Можно ожидать, что итеративная процедура сойдется в некоторой точке, где приближение проекционной геометрии уже не будет меняться значительно в последующих итерациях, и тогда вычисления могут быть остановлены.
Единственным результатом процедуры автокалибровки на основе компенсации движений является набор параметров жесткого преобразования для каждой проекции, которые, после их применения к начальной оценке проекционной геометрии, позволяют получить оптимизированную оценку рентгеновской проекционной геометрии. Начальную оценку проекционной геометрии заменяют на оптимизированную и используют ее как входные данные для вычисления финального реконструированного DBT-изображения, представляющего пациента, которое затем используют в медицинских целях.
В контексте томографической реконструкции для маммографии настоящее изобретение может использоваться с ограниченным числом проекционных изображений и с использованием ограниченного угла томографии. Количество проекционных изображений может составлять всего лишь порядка десятков, например, менее 20 изображений, или даже менее 10 изображений. Угол томографии может составлять менее 60 градусов, или даже менее 40 градусов, например, 15-30 градусов.
Предложенный способ может быть реализован в виде компьютерного программного обеспечения, которое исполняют в вычислительном устройстве. Когда программное обеспечение исполняют в вычислительном устройстве, оно будет сконфигурировано для выполнения описанного выше способа, предложенного в настоящем изобретении. Программное обеспечение размещают на машиночитаемом носителе, благодаря чему оно может быть доставлено в вычислительное устройство.
Предложенный способ может быть реализован в виде компьютерного программного обеспечения, которое исполняют в вычислительном устройстве. Программное обеспечение размещают на машиночитаемом носителе, благодаря чему оно может быть доставлено в вычислительное устройство.
Как отмечалось выше, различные компоненты в примерах осуществления настоящего изобретения могут включать машиночитаемый носитель или память для хранения инструкций, запрограммированных в соответствии с замыслом настоящего изобретения, а также для хранения структур данных, таблиц, записей и/или иных данных, упоминаемых в настоящем документе. Машиночитаемый носитель может быть любым подходящим носителем, который участвует в доставке инструкций в процессор для их выполнения. Распространенные виды машиночитаемых носителей могут включать, например, дискеты, гибкие диски, жесткие диски, магнитную ленту или любые другие подходящие магнитные носители, CD-ROM, CD±R, CD±RW, DVD, DVD-RAM, DVD±RW, DVD±R, HD DVD, HD DVD-R, HD DVD-RW, HD DVD-RAM, диски Blu-ray, любые иные подходящие оптические носители, память, RAM, PROM, EPROM, FLASH-EPROM, или любые подходящие запоминающие микросхемы или картриджи, несущую волну или любые иные среды распространения, из которых компьютер может выполнять чтение данных.
Итак, варианты осуществления настоящего изобретения включают процесс автокалибровки для цифровой томографической реконструкции груди, который содержит:
получение набора проекционных рентгеновских изображений исследуемого пациента, включающего ограниченное количество двумерных изображений в ограниченном угле томографии, с использованием средств рентгенографии, включающих рентгеновский источник и рентгеновский детектор;
определение начальной оценки проекционной геометрии, описывающей пространственные позиции и ориентацию рентгеновского источника и рентгеновского детектора во время получения проекционных рентгеновских изображений;
вычисление промежуточной DBT-реконструкции с использованием проекционных рентгеновских изображений и начальной оценки проекционной геометрии;
определение, для каждой проекции, корректирующих геометрических преобразований для начальной оценки проекционной геометрии на основе проекционных рентгеновских изображений, начальной оценки проекционной геометрии и промежуточной DBT-реконструкции;
и вычисление финальной DBT-реконструкции с использованием проекционных рентгеновских изображений и скорректированной оценки проекционной геометрии, соответствующей найденным корректирующим геометрическим преобразованиям, при этом корректирующие геометрические преобразования для начальной оценки проекционной геометрии определяют в заданной для каждого проекционного изображения вращающейся системе координат, соответствующей пространственным позициям и ориентации рентгеновского источника и рентгеновского детектора во время получения проекционных рентгеновских изображений.
Упомянутая заданная для каждого проекционного изображения вращающаяся система координат может быть задана путем выбора, в качестве одной из осей, центрального луча, соединяющий рентгеновский источник с центром пиксельной матрицы рентгеновского детектора, а в качестве двух остальных перпендикулярных осей линий, совпадающих с ортогональной проекцией пиксельной матрицы рентгеновского источника на плоскость, перпендикулярную упомянутому центральному лучу.
Еще один вариант задания вращающейся системы координат для каждого проекционного изображения - выбор двух перпендикулярных осей, совпадающих с пиксельной матрицей рентгеновского детектора, и третьей перпендикулярной оси, совпадающей с нормалью к пиксельной матрице рентгеновского детектора.
В соответствии с одним из вариантов осуществления настоящего изобретения упомянутая заданная для каждого проекционного изображения вращающаяся система координат может быть задана выбором двух перпендикулярных осей, совпадающих с ортогональными геометрическими проекциями границ рентгеновского детектора на плоскость, перпендикулярную упомянутому центральному лучу, и третьей оси, совпадающей с центральным лучом.
В соответствии с одним из вариантов осуществления настоящего изобретения упомянутая заданная для каждого проекционного изображения вращающаяся система координат может быть задана выбором двух перпендикулярных осей, совпадающих с границами рентгеновского детектора, и третьей оси, совпадающей с нормалью к рентгеновскому детектору.
Проекционную геометрию для реконструированной цифровым путем репроецированной рентгенограммы получают путем применения геометрического преобразования во вращающейся системе координат к начальной оценке проекционной геометрии.
Корректирующие геометрические преобразования определяют путем нахождения максимума сходства между проекционными рентгеновскими изображениями и соответствующими реконструированными цифровым путем репроецированными рентгенограммами промежуточной DBT-реконструкции.
Результирующее преобразование в неподвижной системе координат вычисляют и вычитают его из корректирующих геометрических преобразований, определенных во вращающейся системе координат.
Результирующее преобразование в неподвижной системе координат вычисляют при помощи отображения геометрических преобразований для каждого проекционного изображения из вращающейся системы координат в неподвижную систему координат, и их усреднения, и затем полученное среднее значение вычитают из геометрических преобразований после отображения из неподвижной во вращающуюся систему координат.
Вычисление промежуточной DBT-реконструкции и определение корректирующих геометрических преобразований выполняют итеративно множество раз, при этом скорректированная оценка проекционной геометрии после каждой итерации служит новой начальной оценкой проекционной геометрии для последующей итерации, а финальная скорректированная оценка проекционной геометрии соответствует скорректированной оценке проекционной геометрии в последней выполненной итерации.
Варианты осуществления настоящего изобретения включают компьютерную программу, которая содержит компьютерный программный код, сконфигурированный для выполнения способа в соответствии с предшествующим описанием при его выполнении в вычислительном устройстве, при этом устройство включает:
по меньший мере один процессор для выполнения компьютерных программ; и
по меньшей мере одну память, сконфигурированную для хранения компьютерных программ и связанных с ними данных;
при этом устройство может быть соединено с медицинским устройством формирования изображений и сконфигурировано для выполнения способа в соответствии с предшествующим описанием.
Еще один вариант осуществления настоящего изобретения представляет собой способ авто калибровки цифровой томографической реконструкции груди (DBT), включающий:
получение набора экспонированных проекционных рентгеновских изображений; формирование начальной оценки проекционной геометрии, соответствующей каждому из экспонированных проекционных рентгеновских изображений; вычисление промежуточной DBT-реконструкции;
установление набора параметров жесткого преобразования, применяемых к начальной оценке проекционной геометрии для каждого экспонированного проекционного рентгеновского изображения, которые соответствуют результату калибровки; и
вычисление финальной DBT-реконструкции с использованием набора экспонированных проекционных рентгеновских изображений и финальной калиброванной оценки проекционной геометрии.
Финальное реконструированное DBT-изображение вычисляют с использованием исходных рентгенограмм и уточненной проекционной геометрии на основе установленного набора параметров жесткого преобразования.
Способ также включает выполнение жесткого преобразования, для каждого проекционного изображения, начальной оценки проекционной геометрии путем применения установленного набора параметров жесткого преобразования.
Преобразование включает параллельный перенос и поворот.
Применение набора параметров жесткого преобразования к текущей оценке проекционной геометрии для заданного проекционного изображения дает в результате измененную или уточненную форму проекционной геометрии, соответствующей виртуальному перемещению рентгеновского источника и рентгеновского детектора.
Перед вычислением DRR-изображения промежуточной DBT-реконструкции выполняют жесткое преобразование соответствующей начальной оценки проекционной геометрии.
Способ также включает выполнение жесткого преобразования во вращающейся системе координат, заданной для каждого проекционного изображения.
Способ также включает измерение сходства вычисленного DRR-изображения и соответствующего измеренного проекционного рентгеновского изображения.
Способ также включает оптимизацию параметров жесткого преобразования для каждой проекции путем нахождения экстремума меры сходства между измеренным проекционным рентгеновским изображением и соответствующим вычисленным проекционным DRR-изображением как функции параметров жесткого преобразования.
Предложенный способ выполняют итеративно множество раз, при этом полученные параметры преобразования используют в следующей итерации в качестве начальной оценки для дальнейшей оптимизации параметров.
В одном из вариантов осуществления настоящего изобретения компьютерная программа содержит компьютерный программный код, сконфигурированный для выполнения способа в соответствии с предшествующим описанием при его выполнении в вычислительном устройстве.
Один из вариантов осуществления настоящего изобретения представляет собой устройство, включающее:
по меньший мере один процессор (112) для выполнения компьютерных программ; и
по меньшей мере одну память (113), сконфигурированную для хранения компьютерных программ и связанных с ними данных;
при этом устройство может быть соединено с медицинской системой формирования изображений и сконфигурировано для выполнения способа в соответствии с предшествующим описанием.
Еще одним из вариантов осуществления настоящего изобретения является система формирования изображений медицинской цифровой томографической реконструкции груди, включающая:
медицинское устройство формирования изображений; и
устройство, описанное выше, соединенное с медицинским устройством формирования изображений.
Специалистам в данной области техники должно быть очевидно, что с развитием технологий могут появляться различные новые пути осуществления предложенного медицинского устройства формирования изображений с автокалибровкой. Предложенное медицинское устройство формирования изображений с автокалибровкой и варианты его осуществления, таким образом, не ограничены описанными выше примерами и могут свободно изменяться в пределах объема приложенной формулы изобретения.
Использование: для калибровки, применяемой, в частности, к цифровой томографической реконструкции груди (DBT) с ограниченным углом. Сущность изобретения заключается в том, что получают набор экспонированных проекционных рентгеновских изображений; формируют начальную оценку проекционной геометрии, соответствующей каждому из экспонированных проекционных рентгеновских изображений; вычисляют промежуточную DBT-реконструкцию; устанавливают набор параметров жесткого преобразования, применяемых к начальной оценке проекционной геометрии для каждого экспонированного проекционного рентгеновского изображения и соответствующих результату калибровки, и вычисляют финальную DBT-реконструкцию с использованием набора экспонированных проекционных рентгеновских изображений и финальной калиброванной оценки проекционной геометрии. Технический результат: обеспечение возможности повышения качества результирующего изображения. 8 н. и 21 з.п. ф-лы, 5 ил.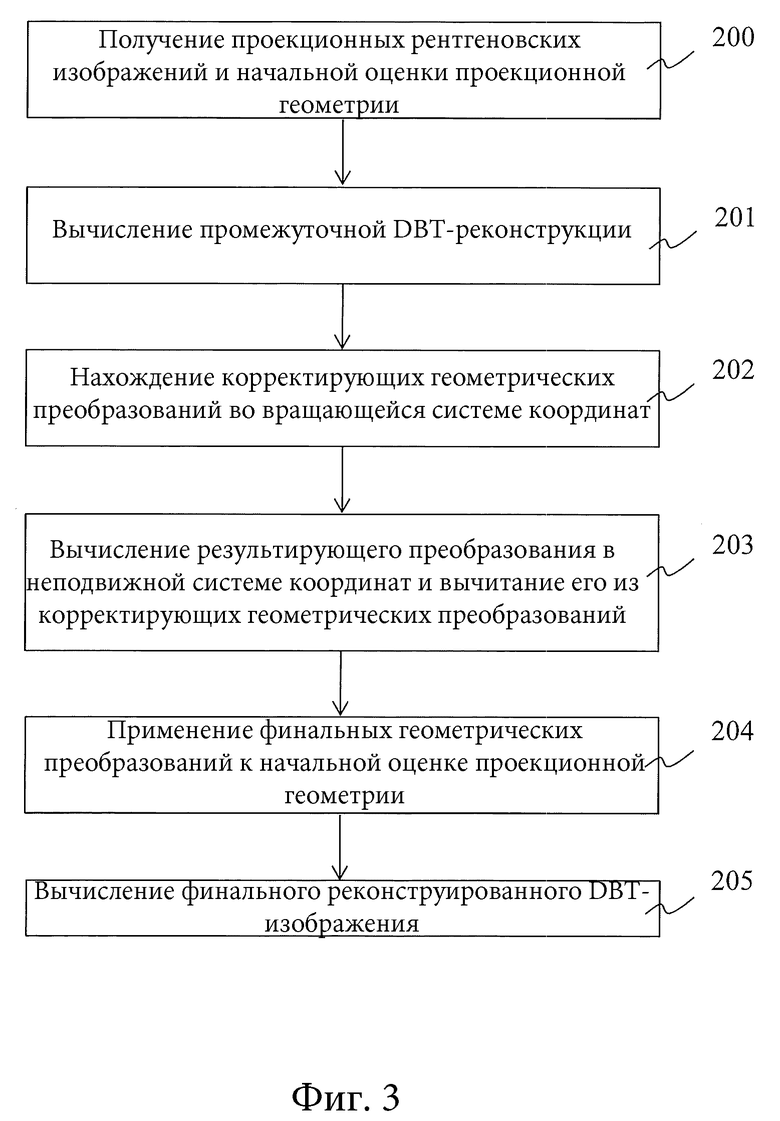
1. Способ автокалибровки для цифровой томографической реконструкции груди (DBT), включающий:
получение множества двумерных проекционных рентгеновских изображений в угле томографии с использованием средств рентгенографии, включающих рентгеновский источник и рентгеновский детектор;
определение начальной оценки проекционной геометрии, описывающей пространственные позиции и ориентацию рентгеновского источника и рентгеновского детектора во время получения упомянутых проекционных рентгеновских изображений;
вычисление промежуточной DBT-реконструкции с использованием проекционных рентгеновских изображений и начальной оценки проекционной геометрии;
определение, для каждой проекции, корректирующих геометрических преобразований для коррекции начальной оценки проекционной геометрии на основе проекционных рентгеновских изображений, начальной оценки проекционной геометрии и промежуточной DBT-реконструкции; и
вычисление финальной DBT-реконструкции с использованием проекционных рентгеновских изображений и скорректированной оценки проекционной геометрии, соответствующей найденным корректирующим геометрическим преобразованиям;
при этом упомянутые проекционные рентгеновские изображения содержат ограниченное количество двумерных изображений, полученных в ограниченном угле томографии, а корректирующие геометрические преобразования для коррекции начальной оценки проекционной геометрии определяют в заданной для каждого проекционного изображения вращающейся системе координат, соответствующей пространственным позициям и ориентациям рентгеновского источника и рентгеновского детектора во время получения проекционных рентгеновских изображений.
2. Способ по п. 1, в котором упомянутую заданную для каждого проекционного изображения вращающуюся систему координат задают путем выбора одной оси так, что она совпадает с центральным лучом, соединяющим рентгеновский источник с центром пиксельной матрицы рентгеновского детектора, и выбора двух других перпендикулярных осей так, что они совпадают с ортогональной проекцией осей пиксельной матрицы рентгеновского источника на плоскость, перпендикулярную упомянутому центральному лучу.
3. Способ по п. 1, в котором упомянутую вращающуюся систему координат для каждого проекционного изображения задают путем выбора двух перпендикулярных осей так, что они совпадают с пиксельной матрицей рентгеновского детектора, и выбора третьей перпендикулярной оси так, что она совпадает с нормалью к пиксельной матрице рентгеновского детектора.
4. Способ по п. 1 или 2, в котором проекционную геометрию для реконструированной цифровым путем репроецированной рентгенограммы получают путем применения геометрического преобразования во вращающейся системе координат к начальной оценке проекционной геометрии.
5. Способ по любому из пп. 1−4, в котором корректирующие геометрические преобразования определяют путем нахождения максимума сходства между проекционными рентгеновскими изображениями и соответствующими реконструированными цифровым путем репроецированными рентгенограммами промежуточной DBT-реконструкции.
6. Способ по любому из пп. 1−5, в котором вычисляют результирующее преобразование в неподвижной системе координат и вычитают его из корректирующих геометрических преобразований, найденных во вращающейся системе координат.
7. Способ по любому из пп. 1−6, в котором вычисляют результирующее преобразование в неподвижной системе координат путем отображения геометрических преобразований для каждого проекционного изображения из вращающейся системы координат в неподвижную систему координат и их усреднения, и затем полученное среднее значение вычитают из геометрических преобразований после отображения из неподвижной во вращающуюся систему координат.
8. Способ по любому из пп. 1−7, в котором вычисление промежуточной DBT-реконструкции и определение корректирующих геометрических преобразований выполняют итеративно множество раз, при этом скорректированная оценка проекционной геометрии после каждой итерации служит новой начальной оценкой проекционной геометрии для последующей итерации, а финальная скорректированная оценка проекционной геометрии соответствует скорректированной оценке проекционной геометрии последней выполненной итерации.
9. Способ по любому из пп. 1−8, в котором упомянутое ограниченное количество проекционных изображений составляет порядка десяти изображений.
10. Способ по любому из пп. 1−8, в котором упомянутое ограниченное количество проекционных изображений является меньшим 20 изображений.
11. Способ по любому из пп. 1−8, в котором упомянутое ограниченное количество проекционных изображений является меньшим 10 изображений.
12. Способ по любому из пп. 1−11, в котором упомянутый ограниченный угол томографии составляет менее приблизительно 60 градусов.
13. Способ по любому из пп. 1−11, в котором упомянутый ограниченный угол томографии составляет менее приблизительно 40 градусов, например 15−30 градусов.
14. Машиночитаемый носитель, включающий компьютерный программный код, который сконфигурирован для выполнения способа по любому из пп. 1−13 при его выполнении в вычислительном устройстве.
15. Устройство автокалибровки для цифровой томографической реконструкции груди (DBT), включающее:
по меньший мере один процессор для выполнения компьютерных программ; и
по меньшей мере одну память, сконфигурированную для хранения компьютерных программ и связанных с ними данных;
отличающееся тем, что устройство выполнено с возможностью соединения с медицинским устройством формирования изображений и сконфигурировано для выполнения способа по любому из пп. 1−13.
16. Система для формирования изображений медицинской цифровой томографической реконструкции груди, включающая:
медицинское устройство формирования изображений; и
устройство по п. 15, соединенное с медицинским устройством формирования изображений.
17. Способ автокалибровки для цифровой томографической реконструкции груди (DBT), включающий:
получение набора экспонированных проекционных рентгеновских изображений; и
формирование начальной оценки проекционной геометрии, соответствующей каждому из экспонированных проекционных рентгеновских изображений;
отличающийся тем, что способ также включает:
вычисление промежуточной DBT-реконструкции;
установление набора параметров жесткого преобразования, применяемых к начальной оценке проекционной геометрии для каждого экспонированного проекционного рентгеновского изображения, которые соответствуют результату калибровки; и
вычисление финальной DBT-реконструкции с использованием набора экспонированных проекционных рентгеновских изображений и финальной калиброванной оценки проекционной геометрии.
18. Способ по п. 17, в котором финальное реконструированное DBT-изображение вычисляют с использованием исходных рентгеновских изображений и уточненной проекционной геометрии на основе установленного набора параметров жесткого преобразования.
19. Способ по п. 17 или 18, также включающий выполнение, для каждого проекционного изображения, жесткого преобразования начальной оценки проекционной геометрии путем применения установленного набора параметров жесткого преобразования.
20. Способ по любому из пп. 17−19, в котором преобразование включает параллельный перенос и поворот.
21. Способ по любому из пп. 17−20, в котором применение набора параметров жесткого преобразования к текущей оценке проекционной геометрии для заданного проекционного изображения дает результатом изменение или уточнение формы проекционной геометрии, соответствующей виртуальному перемещению рентгеновского источника и рентгеновского детектора.
22. Способ по п. 21, в котором жесткое преобразование соответствующей начальной оценки проекционной геометрии предшествует вычислению DRR-изображения промежуточной DBT-реконструкции.
23. Способ по п. 21 или 22, также включающий выполнение жесткого преобразования во вращающейся системе координат, заданной для каждого проекционного изображения.
24. Способ по любому из пп. 21−23, также включающий измерение сходства вычисленного DRR-изображения и соответствующего измеренного проекционного рентгеновского изображения.
25. Способ по любому из пп. 21−24, также включающий оптимизацию параметров жесткого преобразования для каждой проекции путем нахождения экстремума меры сходства между измеренным проекционным рентгеновским изображением и вычисленным проекционным DRR-изображением, как функции параметров жесткого преобразования.
26. Способ по любому из пп. 17−25, который выполняют итеративно множество раз, при этом полученные параметры преобразования используют в следующей итерации в качестве начальной оценки для дальнейшей оптимизации параметров.
27. Машиночитаемый носитель, включающий компьютерный программный код, который сконфигурирован для осуществления способа по любому из пп. 17−26 при его выполнении в вычислительном устройстве.
28. Устройство автокалибровки для цифровой томографической реконструкции груди (DBT), включающее:
по меньший мере один процессор для выполнения компьютерных программ; и
по меньшей мере одну память, сконфигурированную для хранения компьютерных программ и связанных с ними данных;
отличающееся тем, что устройство выполнено с возможностью соединения с медицинской системой формирования изображений и сконфигурировано для выполнения способа по любому из пп. 17−26.
29. Система для формирования изображений медицинской цифровой томографической реконструкции груди, включающая:
медицинское устройство формирования изображений; и
устройство по п. 28, соединенное с медицинским устройством формирования изображений.
| US 2004264648 A1, 30.12.2004 | |||
| US 2012039437 A1, 16.02.2012 | |||
| US 2010226475 A1, 09.09.2010 | |||
| US 2017128028 A1, 11.05.2017 | |||
| US 2010195882 A1, 05.08.2010 | |||
| ОЦЕНКА ПЛОТНОСТИ МОЛОЧНОЙ ЖЕЛЕЗЫ | 2011 |
|
RU2587556C2 |

