ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, в общем, к хирургическим инструментам, которые могут выполнять несколько хирургических процедур или действий, и в частности, к хирургическим отрезным и фиксирующим инструментам с устройствами для измерения истекшего времени между этапами хирургической процедуры.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Известные хирургические степлеры содержат концевой эффектор, который одновременно делает продольный разрез в ткани и налагает ряды скобок на противоположных сторонах разреза. Концевой эффектор содержит пару согласованно действующих зажимных элементов, которые, если инструмент предназначен для эндоскопических или лапароскопических применений, способны проходить по проходу канюли. Один из зажимных элементов вмещает кассету для скобок, содержащую, по меньшей мере, два поперечно разнесенных ряда скобок. Другой зажимной элемент образует упор, содержащий скобкоформирующие углубления, совмещенные с рядами скобок в кассете. Инструмент содержит множество возвратно-поступательных клиньев, которые, при приведении в движение в дистальном направлении, проходят по отверстиям в кассете для скобок и входят в зацепление с поводками, выполняющими функцию опор для скобок, чтобы производить выталкивание скобок к упору.
Пример хирургического сшивающего скобками аппарата, пригодного для эндоскопического применения, описан в патенте США № 5465895, описание которого целиком включено в настоящую заявку путем ссылки и в котором предлагается эндоскопический режущий инструмент типа эндоножа с раздельными смыкающим и отрезным/прошивным действиями. Врач, применяющий данное устройство, имеет возможность смыкать зажимные элементы на ткани для позиционирования ткани перед прошивкой/отрезанием. После того как врач определил, что зажимные элементы надлежащим образом захватывают ткань, врач может приводить в действие хирургический сшивающий скобками аппарат одним прошивным/отрезным движением или несколькими прошивными/отрезными движениями в зависимости от устройства. Приведение в действие хирургического сшивающего скобками аппарата приводит к отрезанию и сшиванию скобками ткани. Одновременное отрезание и сшивание скобками исключает осложнения, которые могут возникать при последовательном выполнении данных действий разными хирургическими инструментами, которые соответственно только отрезают или накладывают скобки.
Одно особое преимущество возможности смыкания на ткани перед прошивкой/отрезанием состоит в том, что врач может проверить через эндоскоп, что заданное местоположение разреза обеспечено, в том числе, что между противостоящими зажимами захвачено достаточное количество ткани. В противном случае противостоящие зажимы могут быть сведены слишком плотно, в частности, со сдавливанием на их дистальных концах и, следовательно, без эффективного формирования сжатых скобок в разрезанной ткани. В другом крайнем случае чрезмерное количество сжатой ткани может вызвать заедание и неполные прошивку/отрезание.
Другая проблема, с которой можно столкнуться во время применения данных инструментов, возникает, когда врач не позволяет жидкости, находящейся в ткани, которая сжата в концевом эффекторе, вытекать из ткани перед тем, как ткань разрезают и сшивают скобками. Если ткань разрезают слишком быстро после того, как ее сжали, то жидкость в ткани может быстро выходить из ткани и создавать помеху формированию скобок.
Хирургический сшивающий аппарат, предложенный в заявке WO 2006/132992 изобретателя Вайолы с соавторами (Viola et al.), предназначен для решения данной проблемы путем применения контроллера, который задерживает выталкивание скобок, пока не истек предварительно заданный период времени после сжатия. Чтобы обеспечить звуковой или визуальный предупредительный сигнал для уведомления врача о том, что предварительно установленный период времени на сжатие ткани истек и что можно начинать прошивку/отрезание, можно применить проводник, переключатель или механический элемент. Однако если врач намеревается привести в действие устройство до того, как истек предварительно заданный период времени, то сшивающий аппарат не сработает. Подобная неспособность к переналадке нежелательна.
Следовательно, существует потребность в хирургическом отрезном и сшивающем скобками устройстве, которое выполнено с возможностью предоставления врачу средства контроля времени, которое истекло между действиями или этапами хирургической процедуры, при сохранении возможности приведения инструмента в действие в любой момент.
Дополнительно существует потребность в хирургическом отрезном и сшивающем скобками устройстве, которое обладает вышеупомянутыми особенностями с условием, что врач может контролировать период времени, истекший между действиями или этапами хирургической процедуры, без отрыва взгляда от операционного поля.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним общим аспектом настоящее изобретение относится к хирургическому инструменту, который может содержать узел рукоятки, в который, по меньшей мере, частично установлена система управления. Хирургическое приспособление может иметь рабочее соединение с узлом рукоятки для восприятия, по меньшей мере, двух управляющих движений от системы управления, вынуждающих хирургическое приспособление выполнять, по меньшей мере, два хирургических действия. Индикатор истекшего времени можно обеспечить на, по меньшей мере, чем-то одном из узла рукоятки и хирургического приспособления, чтобы обеспечивать индикацию периода времени, который истек после подведения одного из управляющих движений, при сохранении возможности селективного подведения другого из управляющих движений.
В соответствии с другим вариантом осуществления настоящего изобретения предлагается хирургический отрезной и фиксирующий инструмент, который содержит узел рукоятки и концевой эффектор. Концевой эффектор может содержать удлиненный желоб, который содержит зажимной элемент, соединенный с возможностью перемещения с удлиненным желобом для селективного перемещения между разомкнутым и сомкнутым положениями. Концевой эффектор может дополнительно содержать режущий инструмент, который установлен с возможностью перемещения в удлиненном желобе для селективного движения по удлиненному желобу. Инструмент может дополнительно содержать смыкающую систему для селективного приложения смыкающего и размыкающего движений к зажимному элементу и приводную систему для селективного приложения приводного движения к подвижному режущему инструменту, чтобы приводить режущий инструмент в движение из проксимального положения в дистальное положение в удлиненном желобе. Индикатор истекшего времени можно обеспечить на, по меньшей мере, чем-то одном из концевого эффектора и узла рукоятки, чтобы обеспечивать индикацию периода времени, который истек после того, как зажимной элемент переместился в положение фиксации, при сохранении способности приводной системы к селективному приложению приводного движения к подвижному режущему инструменту.
ЧЕРТЕЖИ
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и, совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления, служат для пояснения принципов настоящего изобретения.
Фиг.1 и 2 - виды в перспективе хирургического отрезного и фиксирующего инструмента в соответствии с различными вариантами осуществления настоящего изобретения.
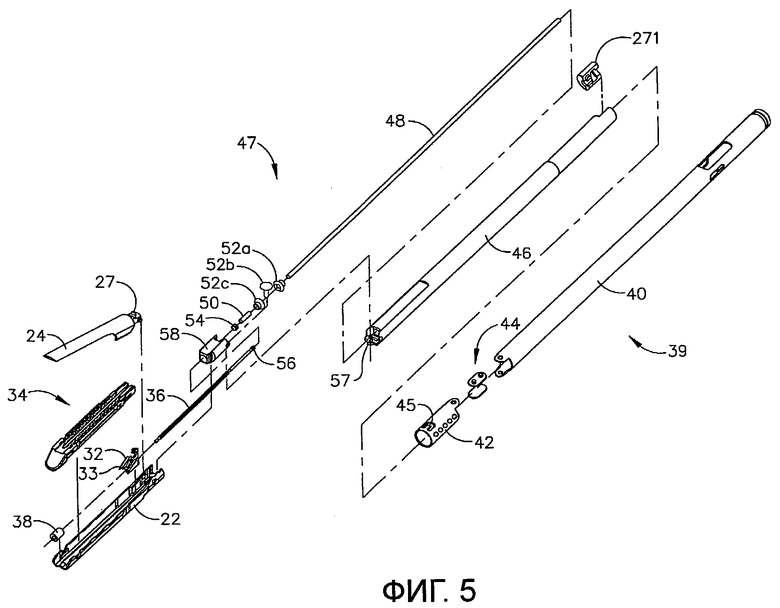
Фиг.3-5 - виды с пространственным разделением компонентов концевого эффектора и стержня инструмента в соответствии с различными вариантами осуществления настоящего изобретения.
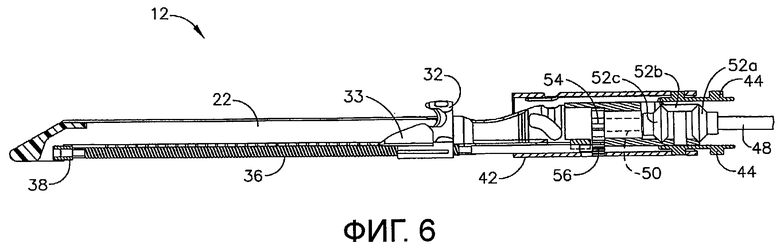
Фиг.6 - вид сбоку в разрезе концевого эффектора в соответствии с различными вариантами осуществления настоящего изобретения.
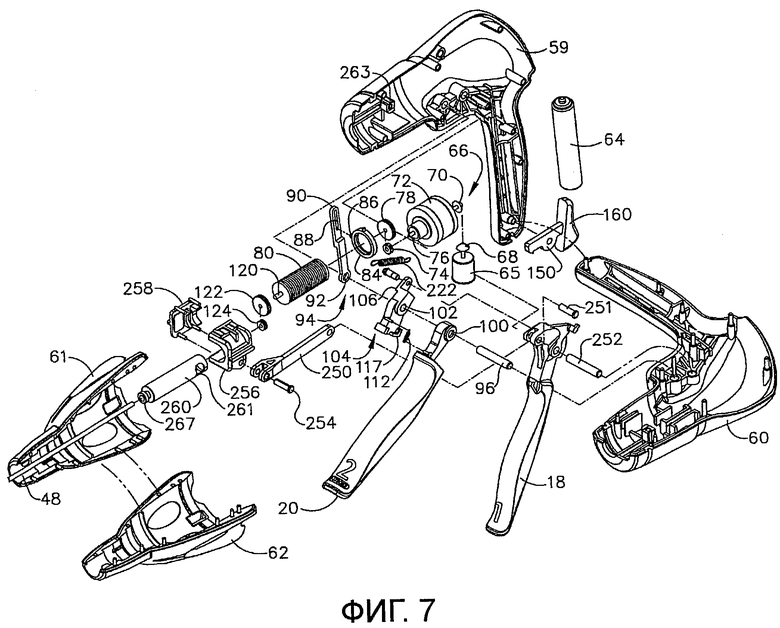
Фиг.7 - вид с пространственным разделением компонентов узла рукоятки инструмента в соответствии с различными вариантами осуществления настоящего изобретения.
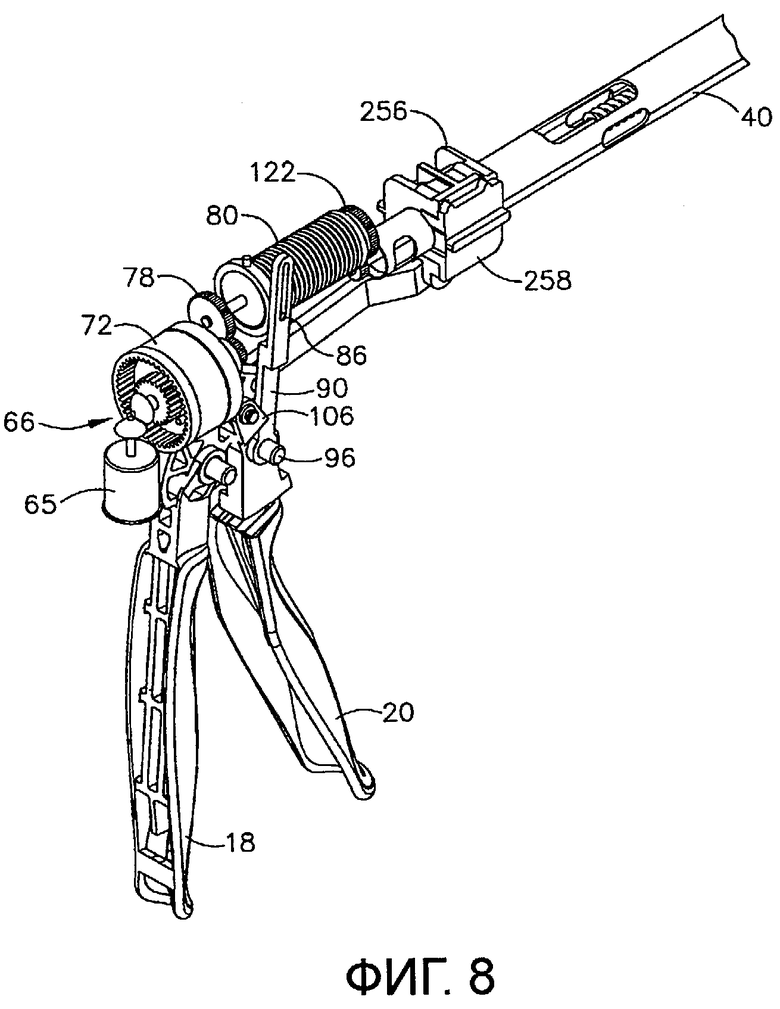
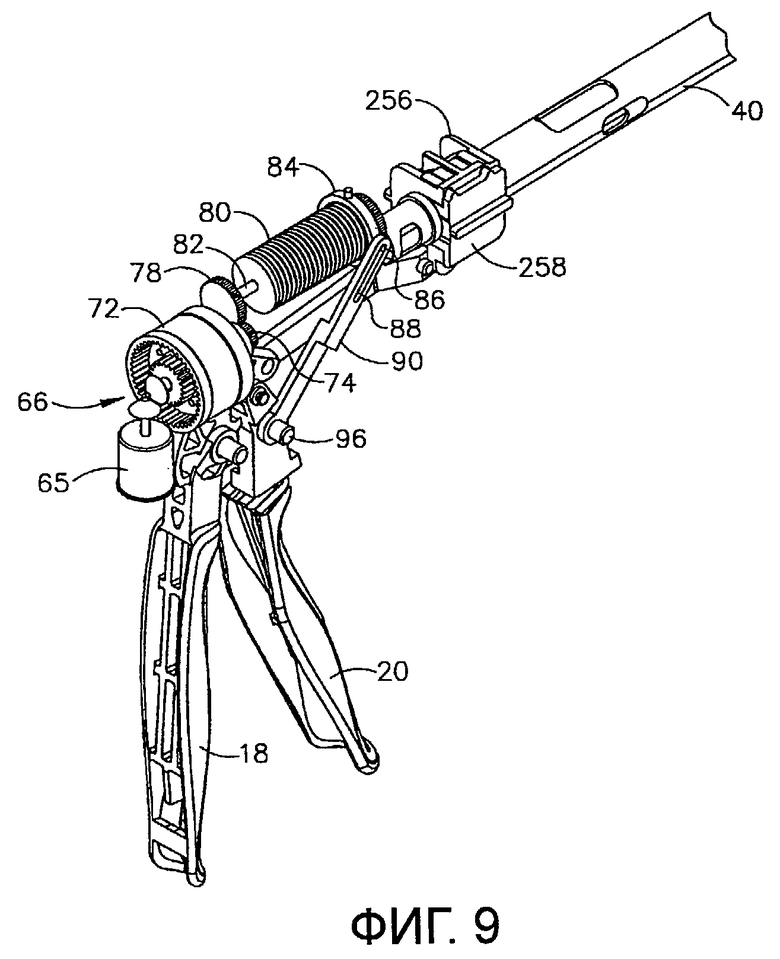
Фиг.8 и 9 - местные виды в перспективе узла рукоятки в соответствии с различными вариантами осуществления настоящего изобретения.
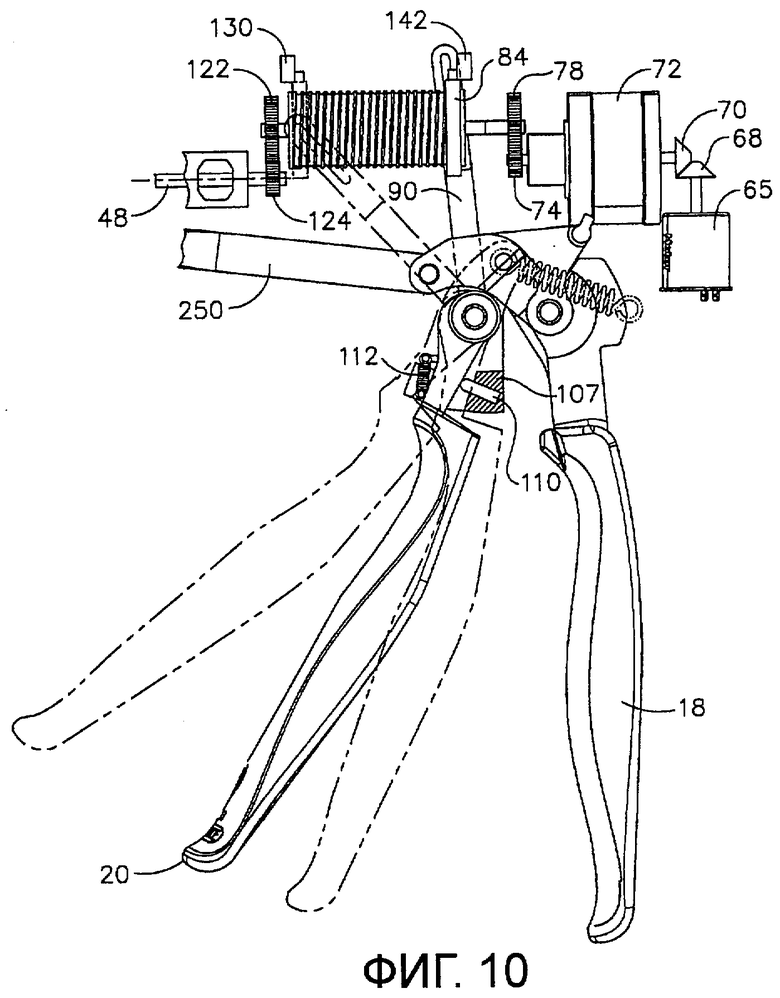
Фиг.10 - вид сбоку участка узла рукоятки в соответствии с различными вариантами осуществления настоящего изобретения.
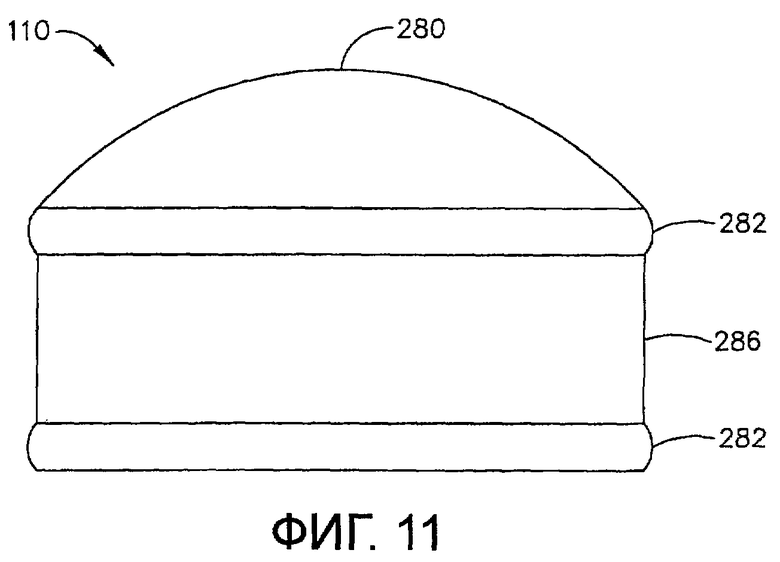
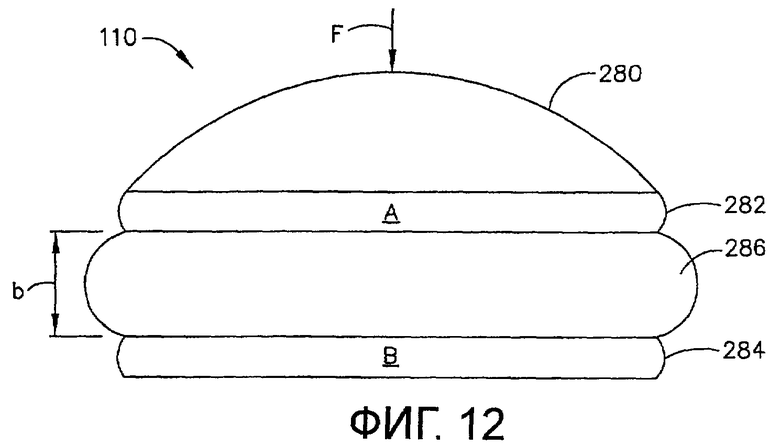
Фиг.11 и 12 - виды пропорционального датчика, который можно применять в соответствии с различными вариантами осуществления настоящего изобретения.
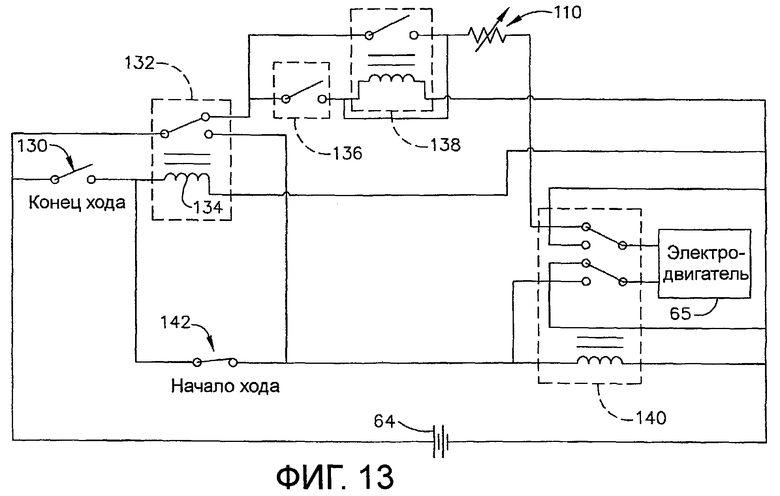
Фиг.13 - принципиальная схема цепи, применяемой в инструменте в соответствии с различными вариантами осуществления настоящего изобретения.
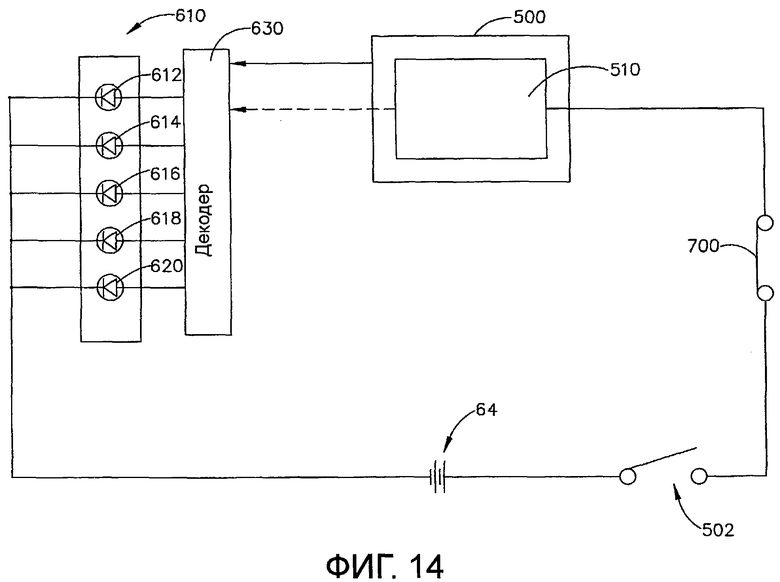
Фиг.14 - принципиальная схема другой цепи, применяемой в инструменте в соответствии с различными вариантами осуществления настоящего изобретения.
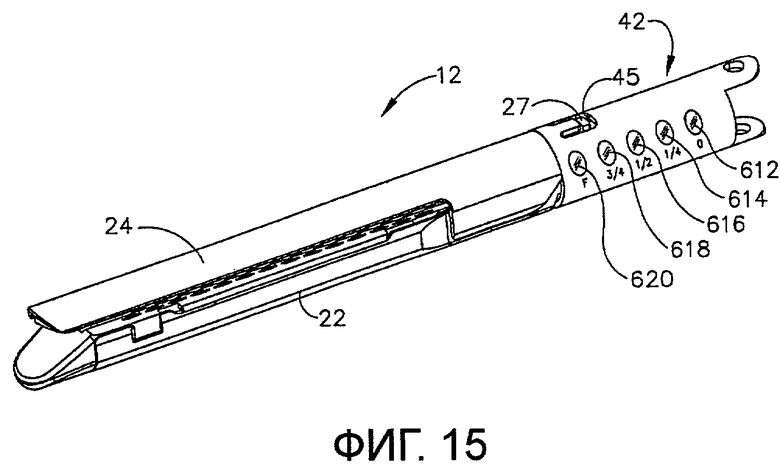
Фиг.15 - вид в перспективе концевого эффектора в соответствии с различными вариантами осуществления настоящего изобретения.
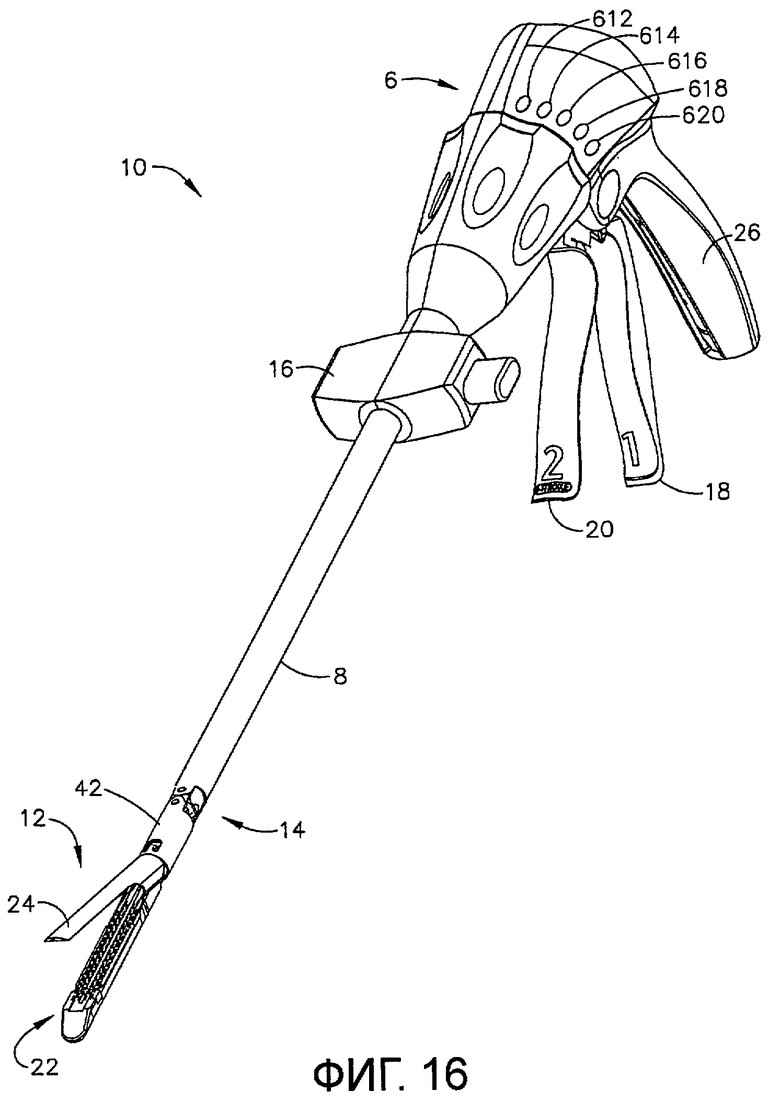
Фиг.16 - вид в перспективе другого хирургического инструмента в соответствии с различными вариантами осуществления настоящего изобретения.
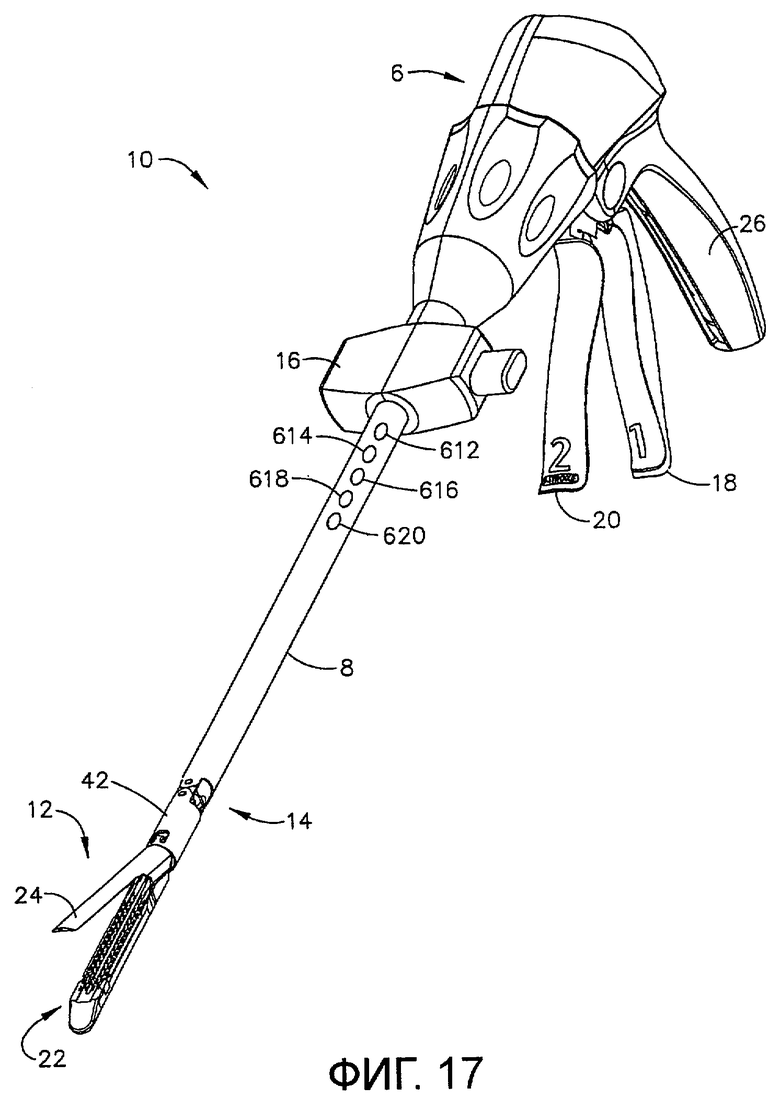
Фиг.17 - вид в перспективе другого хирургического инструмента в соответствии с различными вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
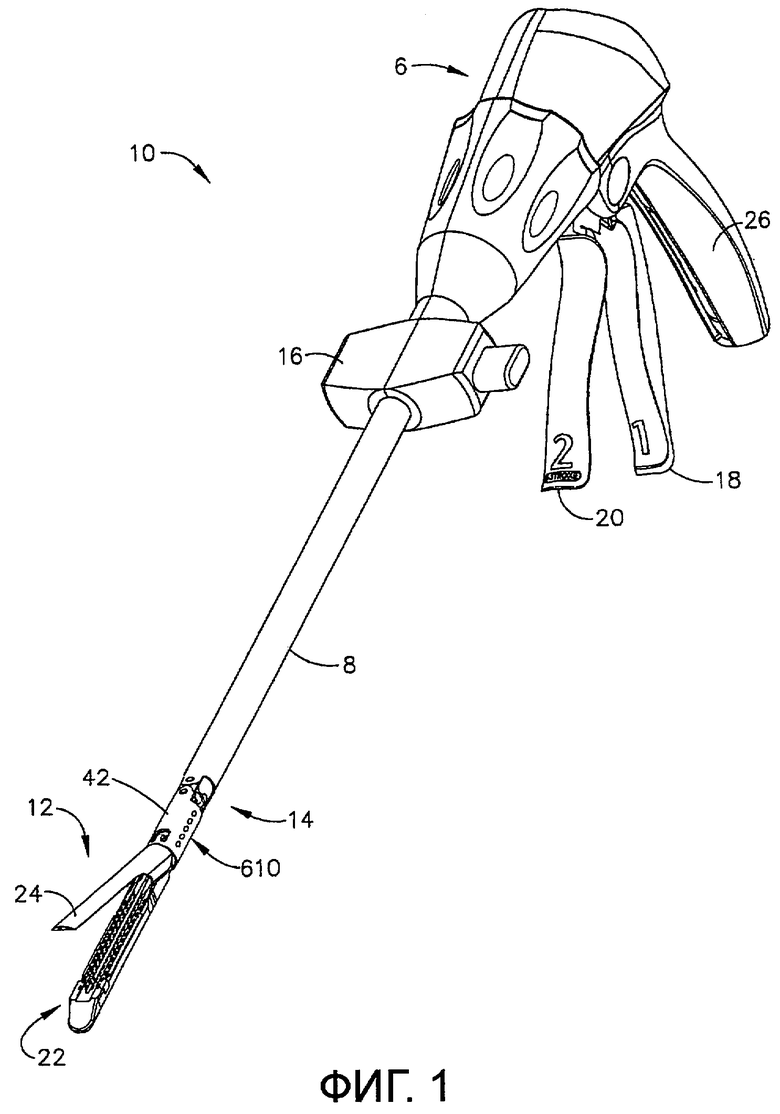
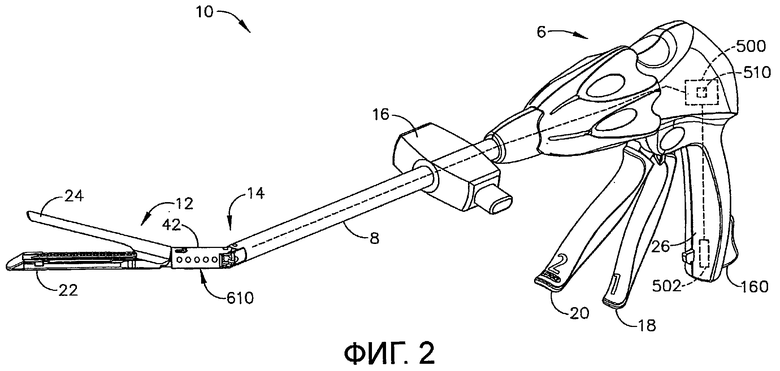
На фиг.1 и 2 изображен хирургический отрезной и фиксирующий инструмент 10 в соответствии с различными вариантами осуществления настоящего изобретения. Показанный вариант осуществления является эндоскопическим инструментом, и, в общем, варианты осуществления инструмента 10, описанные в настоящей заявке, являются эндоскопическими хирургическими отрезными и фиксирующими инструментами. Однако следует понимать, что в соответствии с другими вариантами осуществлениями настоящего изобретения инструмент может быть неэндоскопическим хирургическим инструментом, например лапароскопическим инструментом. Кроме того, следует дополнительно понимать, что возможны также другие варианты хирургических инструментов.
Хирургический инструмент 10, показанный на фиг.1 и 2, содержит узел 6 рукоятки, стержень 8 и шарнирно-поворотное хирургическое приспособление или концевой эффектор 12, шарнирно соединенный со стержнем 8 в шарнире 14 сочленения. Устройство 16 управления шарнирным поворотом может быть обеспечено вблизи рукоятки 6 для осуществления поворота концевого эффектора 12 вокруг шарнира 14 сочленения. В показанном варианте осуществления хирургическое приспособление или концевой эффектор 12 выполнен с возможностью функционирования как эндоскопический режущий инструмент типа эндоножа для зажима, отрезания и сшивания скобками ткани. Хотя в других вариантах осуществления можно применять хирургические приспособления и концевые эффекторы других типов, например захваты, отрезные аппараты, сшивающие аппараты, приспособления для наложения зажимов, устройства доступа, устройства доставки лекарства для генной терапии, ультразвуковые, RF (радиочастотные) или лазерные устройства и т.п., при работе с которыми врачу, возможно, было бы желательно контролировать период времени, который истек между действиями или этапами хирургической процедуры, подлежащей выполнению инструментом, при сохранении возможности управления различными системами управления инструмента.
Узел 6 рукоятки инструмента 10 может содержать смыкающий рычаг 18 и рычаг 20 прошивки/отрезания для приведения в действие концевого эффектора 12. Следует понимать, что инструменты, содержащие хирургические приспособления или концевые эффекторы, предназначенные для разных хирургических задач, могут содержать разные количества или типы рычагов или другие подходящие органы управления для манипулирования концевым эффектором 12. Концевой эффектор 12 показан разделенным с узлом 6 рукоятки посредством, предпочтительно, удлиненного стержня 8. В одном варианте осуществления врач или оператор инструмента 10 может шарнирно поворачивать концевой эффектор 12 относительно стержня 8 с использованием устройства 16 управления шарнирным поворотом, как более подробно поясняется в заявке на патент США № 2007/0158385 A1, поданной 10 января 2006 г., «Surgical Instrument Having An Articulating End Effector», изобретателя Джеффри К. Хьюила с соавторами (Geoffrey C. Hueil et al.), которая целиком включена в настоящую заявку путем ссылки. Однако нешарнирные устройства также применимы и могут эффективно использовать оригинальные и новые особенности различных вариантов осуществления настоящего изобретения. Соответственно, охрана, предоставляемая различным вариантам осуществления настоящего изобретения, не должна ограничиваться шарнирно-поворачиваемыми инструментами.
В настоящем примере концевой эффектор 12 содержит, помимо прочего, удлиненный желоб 22, выполненный с возможностью установки в него кассеты 34 для скобок. Зажимной элемент с поворотно-поступательным перемещением, например упор 24, установлен с возможностью перемещения на удлиненном желобе 22 на некотором расстоянии, которое обеспечивает эффективное сшивание скобками и отрезание ткани, зажатой в концевом эффекторе 12. Узел 6 рукоятки может содержать ручку 26 пистолетного типа, к которой смыкающий рычаг 18 может подтягиваться поворотным движением врачом, чтобы обеспечивать прижим или примыкание упора 24 к кассете 34 для скобок и, тем самым, зажим ткани, расположенной между упором 24 и кассетой 34 для скобок. В данном варианте осуществления рычаг 20 прошивки/отрезания расположен дальше снаружи от смыкающего рычага 18. Как только смыкающий рычаг 18 фиксируется в сомкнутом положении, рычаг 20 прошивки/отрезания может немного повернуться к ручке 26 пистолетного типа таким образом, что становится легко достижимым для оператора, пользующегося одной рукой. Затем оператор может подтянуть поворотным движением рычаг 20 прошивки/отрезания к ручке 26 пистолетного типа, чтобы произвести сшивание скобками и отрезание сжатой ткани в концевом эффекторе 12. В других вариантах осуществления можно применять зажимные элементы других типов, кроме упора 24, например противостоящий зажим и т.п.
Следует понимать, что в настоящем описании термины «проксимальный» и «дистальный» служат для обозначения положения относительно захвата врачом рукоятки 6 инструмента 10. Следовательно, концевой эффектор 12 является дистальным относительно более проксимального узла 6 рукоятки. Кроме того, следует понимать, что для удобства и ясности термины, обозначающие пространственное положение, например «вертикальный» и «горизонтальный», применяются в настоящем описании в отношении чертежей. Однако существует множество пространственно-угловых положений применения хирургических инструментов, и упомянутые термины не предполагают ограничительного и абсолютного значения.
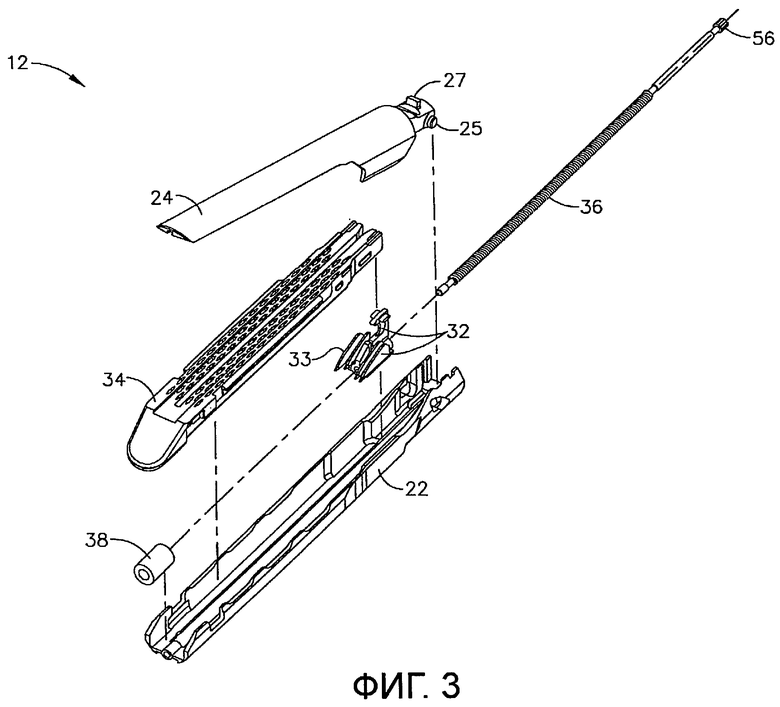
На фиг.3 представлен вид с пространственным разделением компонентов концевого эффектора 12 в соответствии с различными вариантами осуществления настоящего изобретения. Как показано в изображенном варианте осуществления, в дополнение к ранее упомянутым желобу 22 и упору 24, концевой эффектор 12 может содержать режущий инструмент 32, скользящий блок 33, кассету 34 для скобок, которая установлена с возможностью извлечения в желобе 22, и винтовой шпиндель 36. Режущий инструмент 32 может быть, например, ножом. Упор 24 можно размыкать и смыкать поворотом на оси 25 поворота, соединенной с проксимальным концом желоба 22. Упор 24 может содержать также лапку 27 на проксимальном конце упора, который вставляется в компонент механической смыкающей системы (дополнительно описанной ниже) для размыкания и смыкания упора 24. Когда смыкающий рычаг 18 приводится в движение, то есть притягивается пользователем инструмента 10, упор 24 может поворачиваться вокруг оси 25 поворота в сжатое или сомкнутое положение. Если зажим концевого эффектора 12 является удовлетворительным, то оператор может приводить в действие рычаг 20 прошивки/отрезания, который, как подробно поясняется ниже, вынуждает нож 32 и скользящий блок 33 продольно продвигаться по желобу 22 и, тем самым, отрезать ткань, зажатую в концевом эффекторе 12. Перемещение скользящего блока 33 вдоль желоба 22 приводит к продавливанию скобок кассеты 34 для скобок сквозь разрезанную ткань и в упор с сомкнутым упором 24, который загибает скобки для скрепления разрезанной ткани. В различных вариантах осуществления скользящий блок 33 может быть неразъемным компонентом кассеты 34. Патент США 6,978,921, «Surgical Stapling Instrument Incorporating an E-beam Firing Mechanism», который целиком включен в настоящую заявку путем ссылки, содержит дополнительные сведения об упомянутых двухходовых режущих и фиксирующих инструментах. Скользящий блок 33 может составлять часть кассеты 34 таким образом, что когда нож 32 отводится после операции отрезания, скользящий блок 33 не отводится.
Следует отметить, что хотя в вариантах осуществления инструмента 10, описанных в настоящей заявке, используют концевой эффектор 12, который сшивает скобками разрезанную ткань, в других вариантах осуществления можно использовать отличающиеся методы для фиксации или скрепления разрезанной ткани. Например, возможно также применение концевых эффекторов, которые используют RF (высокочастотную энергию) или клеи для фиксации разрезанной ткани. Патент США № 5,709,680 «Electrosurgical Hemostatic Device», изобретателя Ятса с соавторами (Yates et al.) и патент США № 5,688,270 «Electrosurgical Hemostatic Device With Recessed and/or Offset Electrodes», изобретателя Ятса с соавторами (Yates et al.), каждый из которых целиком включен в настоящую заявку путем ссылки, содержат описания эндоскопического режущего инструмента, который использует RF (высокочастотную) энергию для скрепления разрезанной ткани. Заявка на патент США № 11/267,811 изобретателя Джерома Р. Моргана с соавторами (Jerome R. Morgan, et. al.) и заявка на патент США № 11/267,383 изобретателя Фредерика Э. Шелтона IV с соавторами (Frederick E. Shelton, IV, et. al.), каждая из которых также целиком включена в настоящую заявку путем ссылки, содержат описания эндоскопического режущего инструмента, который использует клеи для скрепления разрезанной ткани. Соответственно, хотя настоящее описание относится к операциям разрезания/сшивания скобками и подобным нижеупомянутым операциям, следует понимать, что представленный вариант осуществления является примерным и не предназначен для ограничения. Преимущества, обеспечиваемые различными вариантами осуществления настоящего изобретения, можно в равной степени обеспечивать в связи с другими вариантами хирургических приспособлений и концевых эффекторов.
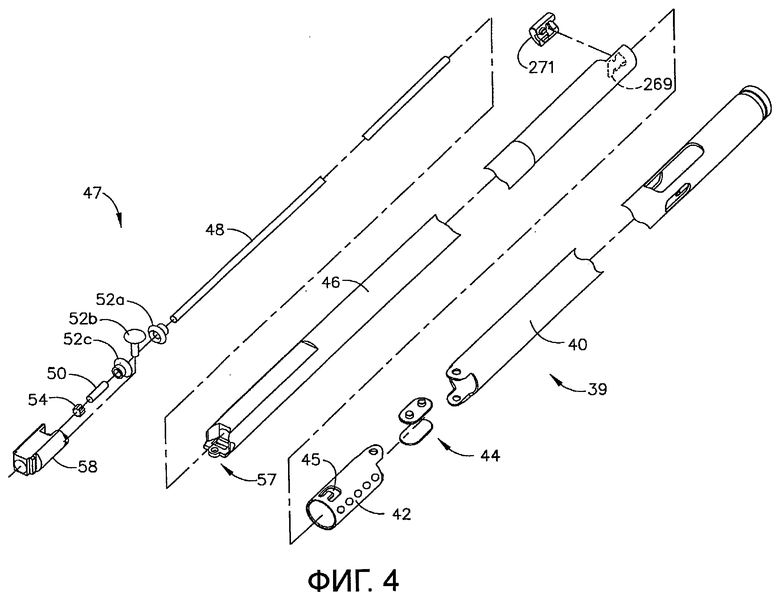
На фиг.4 и 5 представлены виды с пространственным разделением компонентов, и на фиг.6 представлен вид сбоку в разрезе концевого эффектора 12 и стержня 8 в соответствии с различными вариантами осуществления, которые иллюстрируют один вариант смыкающей системы 39, которые могут применяться для перемещения упора 24 между разомкнутым и сомкнутым положениями. Как показано в изображенном варианте осуществления, смыкающая система 39 может содержать проксимальную смыкающую трубку 40 и дистальную смыкающую трубку 42, сочлененные с возможностью поворота шарнирными соединительными звеньями 44. Дистальная смыкающая трубка 42 может содержать отверстие 45, в которое вставляется лапка 27 упора 24, для размыкания и смыкания упора 24, как дополнительно поясняется ниже. Внутри смыкающих трубок 40, 42 может находиться проксимальная несущая трубка 46. Внутри проксимальной несущей трубки 46 может находиться участок приводной системы 47, который может содержать, например, главный вращательный (или проксимальный) ведущий вал 48, который сообщается с вспомогательным (или дистальным) ведущим валом 50 через коническую зубчатую передачу 52. Вспомогательный ведущий валик 50 соединен с ведущим зубчатым колесом 54, которое находится в зацеплении с проксимальным ведущим зубчатым колесом 56 винтового шпинделя 36. Вертикальное коническое зубчатое колесо 52b может быть установлено в отверстии 57 в дистальном конце проксимальной несущей трубки 46. Дистальная несущая трубка 58 может служить для размещения вспомогательного ведущего вала 50 и ведущих зубчатых колес 54, 56. В совокупности, главный ведущий вал 48, вспомогательный ведущий вал 50 и шарнирно-поворотный узел (например, коническая зубчатая передача 52a-c) иногда именуются в настоящем описании «узлом главного ведущего вала», который образует участок приводной системы 47.
Подшипник 38, расположенный на дистальном конце желоба 22 для скобок, вмещает винтовой шпиндель 36 и дает возможность винтовому шпинделю 36 свободно вращаться относительно желоба 22. Смотри фиг.6. Винтовой шпиндель 36 может взаимодействовать с резьбовым отверстием (не показан) в ноже 32 таким образом, что вращение шпинделя 36 вынуждает нож 32 поступательно перемещаться в дистальном или проксимальном направлении (в зависимости от направления вращения) по желобу 22 для скобок. Соответственно, когда главный ведущий вал 48 приводится во вращение приведением в действие рычага 20 прошивки/отрезания (как подробнее изложено ниже), коническая зубчатая передача 52a-c вынуждает вращаться вспомогательный ведущий вал 50, который в свою очередь, благодаря зацеплению ведущих зубчатых колес 54, 56, приводит во вращение винтовой шпиндель 36, что вызывает продольное перемещение ведущего элемента 32 ножа по желобу 22 и, тем самым, отрезание любой ткани, зажатой внутри концевого эффектора. Скользящий блок 33 может быть выполнен, например, из пластика и может иметь скошенную дистальную поверхность. По мере того как скользящий блок 33 движется по желобу 22, скошенная передняя поверхность может вжимать вверх или выталкивать скобки из кассеты для скобок сквозь зажатую ткань и в упор с упором 24. Упор 24 загибает скобки и, тем самым, сшивает скобками отрезанную ткань. Когда нож 32 отводится, нож 32 и скользящий блок 33 могут расцепляться, при этом скользящий блок 33 остается на дистальном конце желоба 22. Опубликованная заявка на патент США № 2007/0233053 A1 «Articulatable Drive Shaft Arrangements For Surgical Cutting and Fastening Instruments», поданная 30 мая 2007 г., содержание которой целиком включено в настоящую заявку путем ссылки, предлагает описание примерного варианта осуществления эндоскопического режущего инструмента типа эндоножа с приводом от электродвигателя, в котором можно использовать оригинальные и новые преимущества различных вариантов осуществления настоящего изобретения.
Смыкающая система 39 и приводная система 47 могут именоваться в настоящем описании «системами управления» для подведения «управляющих движений» к различным компонентам хирургического приспособления 12. Таким образом, размыкающее и смыкающее движения, подводимые смыкающей системой 39, являются «управляющими движениями», а также прошивное/отрезное движения, подводимые приводной системой, являются «управляющими движениями».
Независимо от типа применяемого хирургического приспособления или концевого эффектора, многие из вышеупомянутых типов концевых эффекторов служат для выполнения, по меньшей мере, двух действий во время использования. Например, концевой эффектор 12 сначала может служить для захвата ткани и манипулирования тканью. Как только целевую ткань выявили, произвели с ней манипуляции и поместили между упором и кассетой для скобок, ткань зажимают между упором и кассетой для скобок путем фиксации смыкающего рычага, как поясняется в вышеупомянутой патентной публикации США № 2007/0233053 A1. Как указано выше, возможно, было бы желательно, чтобы прошел предварительно заданный период времени, например около пяти-двадцати секунд или более, перед разрезанием ткани. Для зажима или иного манипулирования тканью перед выполнением других действий с тканью можно также применять другие концевые эффекторы, при этом, возможно, было бы желательно, чтобы некоторый предварительно заданный период времени проходил между данными действиями (даже меньше чем пять секунд). Следовательно, хотя различные признаки и преимущества варианта осуществления настоящего изобретения поясняются ниже со ссылкой на вышеописанный концевой эффектор 12, специалисту несложно понять, что различные признаки настоящего изобретения могут равным образом принести пользу при применении с другими вариантами концевых эффекторов. Соответственно, объем охраны, предоставляемой различным вариантам осуществления настоящего изобретения, не должен ограничиваться конкретным типом концевого эффектора, описанным, в частности, в настоящей заявке.
На фиг.7-10 изображен примерный вариант осуществления эндоскопического режущего инструмента типа эндоножа с приводом от электродвигателя и, в частности, его рукоятки, в которой обеспечивается обратная связь для пользователя по срабатыванию и усилию нагрузки режущего инструмента в концевом эффекторе. Кроме того, данный вариант осуществления может использовать мощность, развиваемую пользователем при отведении назад рычага 20 прошивки, для подведения «управляющего движения» в устройство (в так называемом «бустерном (с усилением)» режиме). Однако возможно применение множества отличающихся конструктивных схем привода эндоскопического режущего инструмента типа эндоножа. Как показано в представленном варианте осуществления, рукоятка 6 содержит внешние нижние боковины 59, 60 и внешние верхние боковины 61, 62, которые собираются с образованием общего внешнего облика узла 6 рукоятки. Батарейка 64, например ионная литиевая батарейка, может быть установлена в участок 26 ручки пистолетного типа узла 6 рукоятки. Батарейка 64 питает, кроме других элементов, электродвигатель 65, расположенный внутри верхнего участка, относящегося к участку 26 ручки пистолетного типа узла 6 рукоятки. В соответствии с разными вариантами осуществления, электродвигатель 65 может быть приводным щеточным электродвигателем постоянного тока с максимальной частотой вращения, приблизительно 5000 об/мин. Электродвигатель 65 может приводить в движение 90° коническую зубчатую передачу 66, содержащую первую коническую шестерню 68 и вторую коническую шестерню 70. Коническая зубчатая передача 66 может приводить в движение планетарную зубчатую передачу 72. Планетарная зубчатая передача 72 может содержать ведущую шестерню 74, соединенную с ведущим валом 76. Ведущая шестерня 74 может приводить в движение сопряженный зубчатый венец 78, который приводит в движение барабан 80 винтовой передачи посредством ведущего вала 82. Кольцо 84 может быть посажено на резьбе на барабан 80 винтовой передачи. Следовательно, когда электродвигатель 65 вращается, кольцо 84 приводится в движение по барабану 80 винтовой передачи посредством промежуточной конической зубчатой передачи 66, планетарной зубчатой передачи 72 и зубчатого венца 78.
Узел 6 рукоятки может также содержать датчик 110 включения электродвигателя, связанный с рычагом 20 прошивки/отрезания, для определения, когда рычаг 20 прошивки/отрезания подтянут (или «притянут») к участку 26 ручки пистолетного типа узла 6 рукоятки оперирующим хирургом, и, тем самым, для запуска исполнения операции отрезания/сшивания скобками концевым эффектором 12. Датчик 110 может быть пропорциональным датчиком, например реостатом или переменным сопротивлением. Когда рычаг 20 прошивки/отрезания прижимают, датчик 110 определяет перемещение и передает электрический сигнал, характеризующий напряжение (или мощность) для подачи в электродвигатель 65. Когда датчик 110 является переменным сопротивлением или чем-то подобным, частота вращения электродвигателя 65 может быть, в общем, пропорциональна величине перемещения рычага 20 прошивки/отрезания. То есть если оперирующий хирург лишь немного подтягивает или приближает рычаг 20 прошивки/отрезания, то частота вращения электродвигателя 65 является относительно низкой. Когда рычаг 20 прошивки/отрезания полностью подтянут (или находится в полностью притянутом положении), частота вращения электродвигателя 65 является максимальной. Другими словами, чем сильнее пользователь подтягивает рычаг 20 прошивки/отрезания, тем более высокое напряжение подается в электродвигатель 65, что обуславливает более высокие частоты вращения.
Узел 6 рукоятки может содержать среднюю деталь 104 рукоятки, прилегающую к верхнему участку рычага 20 прошивки/отрезания. Рукоятка 6 может также содержать оттягивающую пружину 112, закрепленную между штырьками на средней детали 104 рукоятки и рычаге 20 прошивки/отрезания. Оттягивающая пружина 112 может оттягивать рычаг 20 прошивки/отрезания к его полностью разомкнутому положению. При этом, когда оперирующий хирург отпустит рычаг 20 прошивки/отрезания, оттягивающая пружина 112 оттянет рычаг 20 прошивки/отрезания в его разомкнутое положение, что прекращает воздействие на датчик 110 и, тем самым, останавливает вращение электродвигателя 65. Более того, благодаря оттягивающей пружине 112, каждый раз, когда пользователь прижимает рычаг 20 прошивки/отрезания, пользователь будет ощущать сопротивление операции прижима, что обеспечивает пользователя обратной связью по значению частоты вращения, развиваемой электродвигателем 65. Кроме того, оперирующий хирург может прекратить отведение назад рычага 20 прошивки/отрезания для снятия, тем самым, усилия с датчика 110 и, тем самым, для останова электродвигателя 65. По существу, пользователь может остановить срабатывание концевого эффектора 12 с предоставлением, тем самым, оперирующему хирургу средства управления операцией отрезания/фиксации.
Дистальный конец барабана 80 винтовой передачи содержит дистальный ведущий вал 120, который приводит в движение зубчатый венец 122, который сопрягается с ведущей шестерней 124. Ведущая шестерня 124 соединена с главным ведущим валом 48 узла главного ведущего вала. При этом вращение электродвигателя 65 вызывает вращение узла главного ведущего вала, что приводит в действие концевой эффектор 12 вышеописанным способом.
Кольцо 84, посаженное на резьбе на барабан 80 винтовой передачи, может содержать штырек 86, который расположен внутри прорези 88 в прорезанной кулисе 90. Прорезанная кулиса 90 содержит отверстие 92 на противоположном конце 94, которое вмещает шарнирный палец 96, который присоединен между внешними боковинами 59, 60 рукоятки. Шарнирный палец 96 расположен также с проходом через отверстие 100 в рычаге 20 прошивки/отрезания и отверстие 102 в средней детали 104 рукоятки.
Кроме того, узел 6 рукоятки может содержать датчик 130 реверса электродвигателя (или конца хода) и датчик 142 останова электродвигателя (или начала хода). В разных вариантах осуществления датчик 130 реверса электродвигателя может быть концевым переключателем, расположенным на дистальном конце барабана 80 винтовой передачи таким образом, что кольцо 84, установленное на резьбе на барабане 80 винтовой передачи, входит в контакт с датчиком 130 реверса электродвигателя и включает его, когда кольцо 84 достигает дистального конца барабана 80 винтовой передачи. Датчик 130 реверса электродвигателя, при включении, посылает в электродвигатель 65 сигнал на реверсирование направления его вращения и, тем самым, на отведение ножа 32 концевого эффектора 12 по окончании операции отрезания.
Датчик 142 останова электродвигателя может быть, например, нормально замкнутым концевым переключателем. В разных вариантах осуществления упомянутый датчик может располагаться на проксимальном конце барабана 80 винтовой передачи, чтобы кольцо 84 размыкало датчик 142, когда кольцо 84 достигнет проксимального конца барабана 80 винтовой передачи.
Во время работы, когда хирург, оперирующий инструментом 10, подтягивает назад рычаг 20 прошивки/отрезания, датчик 110 определяет расположение рычага 20 прошивки/отрезания и посылает сигнал в электродвигатель 65 для включения правого вращения электродвигателя 65 с частотой, например, пропорциональной тому, насколько сильно оперирующий хирург подтягивает рычаг 20 прошивки/отрезания. Правое вращение электродвигателя 65 в свою очередь обуславливает вращение зубчатого венца 78 на дистальном конце планетарной зубчатой передачи 72 и, тем самым, приводит к вращению барабана 80 винтовой передачи, что вызывает движение кольца 84, установленного на резьбе на барабане 80 винтовой передачи, в дистальном направлении по барабану 80 винтовой передачи. Вращение барабана 80 винтовой передачи приводит во вращение также вышеописанный узел главного ведущего вала, который в свою очередь подводит управляющее движение (например, вызывает срабатывание ножа 32 в концевом эффекторе 12). То есть нож 32 и скользящий блок 33 приводятся в продольное движение по желобу 22 с отрезанием, тем самым, ткани, зажатой в концевом эффекторе 12. Кроме того, обеспечивается выполнение операции сшивания скобками концевым эффектором 12 в тех вариантах осуществления, в которых применяется сшивающий скобками концевой эффектор.
К моменту, когда операция отрезания/сшивания скобками концевым эффектором 12 будет закончена, кольцо 84 на барабане 80 винтовой передачи достигнет дистального конца барабана 80 винтовой передачи и, тем самым, вызовет включение датчика 130 реверса электродвигателя, который посылает сигнал в электродвигатель 65 для осуществления реверсирования вращения электродвигателя 65. Реверсирование в свою очередь вызывает отведение ножа 32, а также приводит кольцо 84 на барабане 80 винтовой передачи в обратное движение к проксимальному концу барабана 80 винтовой передачи.
Средняя деталь 104 рукоятки содержит задний заплечик 106, который входит в зацепление с прорезанной кулисой 90, как лучше всего показано на фиг.8 и 9. Средняя деталь 104 рукоятки имеет также передний упор 107 перемещения, который входит в зацепление с рычагом 20 прошивки/отрезания. Перемещение прорезанной кулисы 90 регулируется, как поясняется выше, вращением электродвигателя 65. Когда прорезанная кулиса 90 поворачивается против часовой стрелки (CCW) в то время как кольцо 84 движется от проксимального конца барабана 80 винтовой передачи к дистальному концу, средняя деталь 104 рукоятки будет иметь свободу поворота против часовой стрелки. Следовательно, по мере того как пользователь будет прижимать рычаг 20 прошивки/отрезания, рычаг 20 прошивки/отрезания будет входить в зацепление с передним упором 107 перемещения средней детали 104 рукоятки и, тем самым, вынуждать среднюю деталь 104 рукоятки вращаться против часовой стрелки. Однако вследствие зацепления заднего заплечика 106 с прорезанной кулисой 90, средняя деталь 104 рукоятки сможет поворачиваться против часовой стрелки лишь настолько, насколько допускает прорезанная кулиса 90. При этом если электродвигатель 65 должен перестать вращаться по какой-либо причине, то прорезанная кулиса 90 перестанет поворачиваться и пользователь не сможет дальше прижимать рычаг 20 прошивки/отрезания, так как средняя деталь 104 рукоятки не будет свободно поворачиваться против часовой стрелки из-за прорезанной кулисы 90.
На фиг.11 и 12 представлены два состояния датчика переменной величины, который можно использовать в качестве датчика 110 включения электродвигателя в соответствии с различными вариантами осуществления настоящего изобретения. Датчик 110 может содержать лобовой участок 280, первый электрод (A) 282, второй электрод (B) 284 и сжимаемый диэлектрический материал 286 (например, EAP (электроактивный полимер)) между электродами 282, 284. Датчик 110 можно расположить так, чтобы лобовой участок 280 контактировал с рычагом 20 прошивки/отрезания при его отведении назад. Соответственно, когда рычаг 20 прошивки/отрезания отводят назад, диэлектрический материал 286 сжимается, как показано на фиг.12, таким образом, что электроды 282, 284 сближаются. Поскольку расстояние «b» между электродами 282, 284 непосредственно связано с полным сопротивлением между электродами 282, 284, то чем больше расстояние, тем больше полное сопротивление, и чем короче расстояние, тем меньше полное сопротивление. При этом величина усилия сжатия диэлектрика 286 вследствие отведения назад рычага 20 прошивки/отрезания (обозначенного как усилие «F» на фиг.12) пропорциональна полному сопротивлению между электродами 282, 284, которое можно использовать для пропорционального управления электродвигателем 65.
Компоненты примерной смыкающей системы для подведения другого управляющего движения (смыкающего или сжимающего) к упору 24 концевого эффектора 12 посредством отведения смыкающего рычага 18 также показаны на фиг.7-10. В представленном варианте осуществления смыкающая система содержит вилку 250, соединенную со смыкающим рычагом 18 с помощью пальца 251, который вставлен сквозь совмещенные отверстия как в смыкающем рычаге 18, так и в вилке 250. Шарнирный палец 252, на котором поворачивается смыкающий рычаг 18, вставлен сквозь другое отверстие в смыкающем рычаге 18, которое смещено от места, где палец 251 вставлен сквозь смыкающий рычаг 18. Следовательно, отведение назад смыкающего рычага 18 вынуждает верхнюю часть смыкающего рычага 18, к которой вилка 250 прикреплена пальцем 251, поворачиваться против часовой стрелки. Дистальный конец вилки 250 соединен пальцем 254 с первой смыкающей скобой 256. Первая смыкающая скоба 256 соединена со второй смыкающей скобой 258. Смыкающие скобы 256, 258 совместно образуют отверстие, в которое проксимальный конец проксимальной смыкающей трубки 40 (смотри фиг.4) посажен и зафиксирован так, что продольное перемещение смыкающих скоб 256, 258 вызывает продольное перемещение проксимальной смыкающей трубки 40. Инструмент 10 содержит также смыкающий шток 260, находящийся внутри проксимальной смыкающей трубки 40. Смыкающий шток 260 может содержать проем 261, в который стойка 263 одной из внешних деталей рукоятки, например внешней нижней боковины 59 в показанном варианте осуществления, входит для жесткого соединения смыкающего штока 260 с рукояткой 6. При этом проксимальная смыкающая трубка 40 может продольно перемещаться относительно смыкающего штока 260. Смыкающий шток 260 может также содержать дистальный кольцевой выступ 267, который входит в проточку 269 в проксимальной несущей трубке 46 и фиксируется в данной проточке крышкой 271 (см. фиг.4).
Когда, в процессе работы, вилка 250 поворачивается из-за отведения смыкающего рычага 18, смыкающие скобы 256, 258 вынуждают проксимальную смыкающую трубку 40 перемещаться в дистальном направлении (т.е. от рукояточного конца инструмента 10), что вызывает дистально направленное перемещение дистальной смыкающей трубки 42, в результате чего упор 24 поворачивается вокруг оси 25 поворота в сжатое или сомкнутое положение. Когда смыкающий рычаг 18 деблокируют из положения фиксации, проксимальная смыкающая трубка 40 принуждается к проксимально направленному сдвигу, который вынуждает дистальную смыкающую трубку 42 сдвигаться в проксимальном направлении, что в свою очередь, благодаря лапке 27, вставленной в отверстие 45 дистальной смыкающей трубки 42, вынуждает упор 24 поворачиваться на оси 25 поворота в разомкнутое или несжатое положение. При этом путем отведения назад и фиксации смыкающего рычага 18 оперирующий хирург может зажать ткань между упором 24 и желобом 22 и может разжать ткань после операции отрезания/сшивания скобками путем деблокирования смыкающего рычага 18 из положения фиксации.
На фиг.13 представлена принципиальная схема электрической цепи инструмента 10 в соответствии с различными вариантами осуществления настоящего изобретения. Когда оперирующий хирург сначала подтягивает рычаг 20 прошивки/отрезания после фиксации смыкающего рычага 18, датчик 110 включается и допускает протекание через него тока. Если нормально разомкнутый переключатель 130 датчика реверса электродвигателя разомкнут (что означает, что конец хода концевого эффектора еще не достигнут), то ток будет протекать к однополюсному двухпозиционному реле 132. Поскольку переключатель 130 датчика реверса электродвигателя не замкнут, катушка 134 индуктивности реле 132 не будет возбуждена, и поэтому реле 132 будет находиться в своем невозбужденном состоянии. Электрическая цепь содержит также датчик 136 блокировки по кассете. Если концевой эффектор 12 содержит кассету 34 для скобок, то датчик 136 будет находиться в замкнутом состоянии и, тем самым, будет допускать протекание тока. В ином случае, если концевой эффектор 12 не содержит кассеты 34 для скобок, то датчик 136 будет разомкнутым и, тем самым, не будет допускать питания электродвигателя 65 от батарейки 64.
Когда кассета 34 для скобок присутствует, датчик 136 замкнут и тогда однополюсное однопозиционное реле 138 получает питание. Когда реле 138 получает питание, ток протекает через реле 138, через датчик 110 на переменном сопротивлении и через двухполюсное двухпозиционное реле 140 в электродвигатель 65 и, следовательно, питает электродвигатель 65 и обеспечивает его правое вращение.
Когда концевой эффектор 12 достигнет конца своего хода, датчик 130 реверса электродвигателя включится и, тем самым, замкнет переключатель 130 и включит питание реле 134. В результате этого реле 134 переключается в его возбужденное состояние (не показанное на фиг.13), что приводит к протеканию тока в обход датчика 136 блокировки по кассете и переменного сопротивления 110 и, тем самым, вынуждает ток протекать как через нормально замкнутое двухполюсное двухпозиционное реле 142, так и обратно через электродвигатель 65, но благодаря реле 140, таким образом, что происходит реверс вращения электродвигателя 65.
Поскольку переключатель 142 датчика останова электродвигателя является нормально замкнутым, ток будет протекать обратно через реле 134 и удерживать его замкнутым, пока переключатель 142 не разомкнется. Когда нож 32 полностью отводится, переключатель 142 датчика останова электродвигателя срабатывает и, тем самым, вызывает размыкание переключателя 142 с выключением, в результате, питания электродвигателя 65.
В других вариантах осуществления вместо пропорционального датчика 110 можно применить двоичный датчик. В таких вариантах осуществления частота вращения электродвигателя 65 не будет пропорциональной усилию, прилагаемому оперирующим хирургом. Вместо этого электродвигатель 65 будет обычно вращаться с постоянной частотой. Но оперирующий хирург по-прежнему будет ощущать обратную связь по усилию, так как рычаг 20 прошивки/отрезания включен в цепь зубчатых передач привода.
Инструмент 10 может также содержать цепь управления, обозначенную общей позицией 500, которая может быть реализована с использованием микроконтроллера или интегральной схемы некоторого другого типа, которую можно применить таким образом, как поясняется в вышеупомянутой опубликованной заявке на патент США № 2007/0233053 A1. Как можно видеть на фиг.14, цепь 500 управления может быть выполнена с возможностью получения сигнала от обычного датчика 502 смыкающего рычага, который может быть установлен на участке 26 рукоятки для обнаружения, когда смыкающий рычаг 18 зафиксирован в сомкнутом положении. Датчик 502 смыкающего рычага может содержать, например, традиционный концевой переключатель, который является нормально разомкнутым и смыкается, когда смыкающий рычаг 18 фиксируется в сомкнутом положении. Однако возможно применение других вариантов датчиков. Цепь 500 управления может дополнительно содержать компонент 510 таймера, который связан с группой световых индикаторов 610. Возможно применение различных количеств и схем расположения световых индикаторов. В показанном варианте осуществления применяются, например, первый световой индикатор 612, второй световой индикатор 614, третий световой индикатор 616, четвертый световой индикатор 618 и пятый световой индикатор 620. Как можно видеть на фиг.15, световые индикаторы 612, 614, 616, 618, 620 могут находиться на дистальной смыкающей трубке 42, и поэтому врач может наблюдать их при наблюдении концевого эффектора 12. Однако в других вариантах осуществления световые индикаторы 612, 614, 616, 618, 620 могут быть установлены на узле 6 рукоятки (фиг.16) или в проксимальном концевом участке стержня 8 (фиг.17). В различных вариантах осуществления световые индикаторы 612, 614, 616, 618, 620 могут содержать светоизлучающие диоды («LED»). Световые индикаторы 612, 614, 616, 618, 620 могут быть обеспечены одинакового цвета или разных цветов, чтобы помогать врачу различать световые индикаторы. Как также можно видеть на фиг.14, в связи с цепью 500 управления и таймером 510 можно применить традиционный декодер 630, чтобы последовательно включать световые индикаторы 612, 614, 616, 618, 620 нижеописанным образом.
Когда врач перемещает смыкающий рычаг 18 в полностью сомкнутое и зафиксированное положение, первый световой индикатор 612 может получить питание. При этом компонент 510 таймера начинает последовательность отсчета времени. После того как истек первый предварительно заданный период времени, например около пяти секунд, контроллер 500 и декодер 630 включают питание второго светового индикатора 614. При этом первый световой индикатор 612 может быть обесточен или может оставаться включенным. Компонент 510 таймера продолжает последовательность отсчета времени, и после того, как истекает второй предварительно заданный период времени, например около дополнительных пяти секунд после того, как истек первый предварительно заданный период времени, контроллер 500 и декодер 630 включают питание третьего светового индикатора 616. При этом первый и второй световые индикаторы 612, 614 могут оставаться включенными или могут быть обесточены. Таким образом, в данном примере после того, как истекли около десяти секунд после того, как смыкающий рычаг 18 переведен в полностью сомкнутое и зафиксированное положение, третий световой индикатор 616 получит питание. Компонент 510 таймера продолжает последовательность отсчета времени, и после третьего предварительно заданного периода времени (дополнительных пяти секунд) контроллер 500/декодер 630 включат питание четвертого светового индикатора 618. При этом первый, второй и третий световые индикаторы 612, 614, 616 могут оставаться включенными или могут быть обесточены. Таким образом, в данном примере после того, как истекли около 15 секунд после того, как смыкающий рычаг 18 переведен в полностью сомкнутое и зафиксированное положение, четвертый световой индикатор 618 получит питание. После того как компонент 510 таймера определяет, что истек четвертый предварительно заданный период времени (дополнительно около пяти секунд), контроллер 500/декодер 630 включат питание пятого светового индикатора 620. При этом первый, второй, третий и четвертый световые индикаторы 612, 614, 616, 618, 620 могут оставаться включенными или могут быть обесточены.
Таким образом, врач может определять, сколько времени прошло с момента, когда ткань была сжата в концевом эффекторе 12 наблюдением световых индикаторов 612, 614, 616, 618, 620. Если в процессе врач желает привести в действие приводную систему, чтобы вызвать движение ножа 32 и скользящего блока 33 по желобу 22 до того, как истечет весь период времени, врач может выполнить свое намерение смыканием рычага 20 прошивки/отрезания. В различных вариантах осуществления можно использовать второй датчик 700 привода для обнаружения момента, когда смыкающий рычаг подтянут или примкнут к ручке 26 пистолетного типа узла 6 рукоятки. Как показано на фиг.14, в различных вариантах осуществления второй датчик 700 привода может содержать «нормально замкнутый» переключатель, чтобы когда рычаг 20 прошивки/отрезания не приведен в действие, второй датчик 700 привода оставался в сомкнутом положении, и когда рычаг 20 прошивки/отрезания приведен в действие, второй датчик 700 привода размыкался. Когда второй датчик привода разомкнут, контроллер 500 сбрасывает компонент 510 таймера и все световые индикаторы 612, 614, 616, 618, 620 обесточиваются. В различных вариантах осуществления, чтобы возобновить питание световых индикаторов 612, 614, 616, 618, 620, врач должен будет отпустить смыкающий рычаг 18 и затем снова вернуть его в сомкнутое и зафиксированное положение. В других вариантах осуществления пятый световой индикатор 620 (и в других вариантах осуществления все световые индикаторы 612, 614, 616, 618, 620) будет оставаться включенным, пока смыкающий рычаг 18 не переведен в деблокированное положение для отпускания зажатой ткани. В некоторых других вариантах осуществления, когда второй датчик 700 привода разомкнут, компонент 510 таймера может начать повторный отсчет периода времени, который истек с момента приведения в действие приводной системы, чтобы врач мог контролировать продолжительность последовательности прошивки/отрезания. И снова декодер 630 цепи управления может управлять последовательностью высвечивания световых индикаторов 612, 614, 616, 618, 620, как описано выше, с пятисекундными интервалами или, при желании, с другими временными интервалами. В некоторых других вариантах осуществления компонент 510 таймера может начинать повторный счет, когда подведение приводного движения прекращено или прервано, чтобы снабжать врача индикацией периода времени, который истек с момента, когда приводное движение прекращено.
В других вариантах осуществления могут применяться отличающиеся конструктивные схемы приводной системы для подведения различных управляющих движений и/или отличающиеся конструктивные схемы датчиков. Например, в альтернативных вариантах осуществления можно применять кодер, который взаимодействует с цепью 500 управления для вычисления стадии срабатывания ножа 32 в концевом эффекторе 12. То есть цепь управления может вычислять, сработал ли полностью, отведен ли полностью или находится ли в промежуточной стадии нож 32. По желанию, контроллер 500 может посылать сигналы в световые индикаторы 612, 614, 616, 618, 620 или во второй набор подобных световых индикаторов (не показаны), чтобы обеспечивать для врача индикацию местоположения ножа 32 в концевом эффекторе по мере того, как нож проходит от проксимального конца удлиненного желоба 22 в дистальный конец удлиненного желоба.
Хотя в вышеописанных вариантах осуществления применяется цепь управления или контроллер, которые содержат традиционный компонент или систему отсчета времени, однако возможно применение других традиционных конструктивных схем таймеров, не выходящих за пределы существа и объема настоящего изобретения. В вариантах осуществления, представленных на фиг.1, 2 и 15, показано применение световых индикаторов 612, 614, 616, 618, 620 на дистальном трубчатом сегменте 42. Данная конструктивная схема позволяет врачу наблюдать световые индикаторы при наблюдении за концевым эффектором 12 в операционном поле. Поэтому врачу не обязательно отрывать взгляд от операционного поля для определения периода времени, который прошел между действиями. В варианте осуществления, представленном на фиг.16, световые индикаторы 612, 614, 616, 618, 620 смонтированы в узле 6 рукоятки, а в инструменте 10”, представленном на фиг.17, световые индикаторы 612, 614, 616, 618, 620 смонтированы в проксимальном конце стержня 8.
Концевой эффектор 12, описанный в настоящей заявке, пригоден, в частности, для зажима ткани и манипуляций тканью, а также для ее разрезания и сшивания скобками. Однако конструктивные схемы световых индикаторов и эквивалентные им конструкции можно эффективно применять в связи с множеством разных концевых эффекторов и хирургических приспособлений в случаях, когда приспособление применяют для выполнения нескольких «действий» и когда врачу желательно знать, сколько времени истекло после начала действия при сохранении возможности приведения в действие хирургического инструмента. Например, хирургическое приспособление может быть неразрезающим, несшивающим эндоскопическим инструментом, например захватом, сшивающим аппаратом, приспособлением для наложения скрепок, устройством доступа, устройством для доставки лекарства генной терапии, устройством для подведения энергии, использующим ультразвук, RF (высокую частоту, лазер и т.п.).
Устройства, описанные в настоящей заявке, могут быть выполнены для отправления в отходы после однократного использования, или упомянутые устройства могут быть выполнены для многократного использования. Однако в обоих случаях устройство можно восстановить для повторного использования после, по меньшей мере, одного использования. Восстановление может включать в себя любую комбинацию этапов разборки устройства, последующие чистку или замену конкретных деталей и затем повторную сборку. В частности, устройство можно разбирать, и любое число конкретных деталей или частей устройства можно селективно заменять или снимать в любой комбинации. После чистки и/или замены конкретных частей устройство может быть повторно собрано для последующего использования либо в ремонтном учреждении, либо персоналом операционного блока непосредственно перед хирургической процедурой. Специалистам со средним уровнем компетентности в данной области техники будет очевидно, что восстановление устройства можно производить с применением множества различных методов для разборки, очистки/замены и повторной сборки. Как применение данных методов, так и получаемое восстановленное устройство находятся в пределах объема настоящего изобретения.
В предпочтительном варианте изобретение, описанное в настоящей заявке, будет подвергаться обработке перед хирургической операцией. Сначала новый или пользованный инструмент получают и при необходимости подвергают очистке. Затем инструмент можно стерилизовать. Согласно одному методу стерилизации инструмент помещают в закрытую и герметизируемую тару, например пакет из пластика или материала TYVEK®. Затем тару и инструмент помещают в поле действия излучения, которое может проникать сквозь тару, например, гамма-излучения, рентгеновского излучения или потока высокоэнергетических электронов. Излучение убивает бактерии на инструменте и в таре. Затем стерилизованный инструмент можно хранить в стерильной таре. Герметизированная тара сохраняет инструмент в стерильном состоянии до вскрытия в медицинском учреждении.
Любые патент, публикация или другие данные описания, в целом или частично, которые упомянуты как включенные в настоящую заявку путем отсылки, включены в настоящую заявку только в таких пределах, в которых включенные данные не противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем описании. По существу и в необходимых пределах, сведения, приведенные в явном виде в настоящей заявке, заменяют собой любые противоречащие данные, включенные в настоящую заявку путем отсылки. Любые данные или их часть, которые упомянуты как включенные в настоящую заявку путем отсылки, но которые противоречат существующим определениям, формулировкам или другим данным, представленным в настоящей заявке, будут включаться только в таких пределах, в которых не возникает противоречия между упомянутыми включенными данными и существующими данными изобретения.
Изобретение, которое предлагается к охране, нельзя толковать как ограниченное конкретными описанными вариантами осуществления. Поэтому варианты осуществления следует считать наглядными, а не ограничивающими. Другими специалистами могут быть созданы варианты и внесены изменения, не выходящие за пределы существа настоящего изобретения. Соответственно, прямо предполагается, что настоящим документом должны охватываться все подобные эквиваленты, варианты и изменения, которые находятся в пределах существа и объема настоящего изобретения, определенных формулой изобретения.
Изобретение относится к медицине. В соответствии с различными вариантами осуществления хирургический инструмент содержит узел рукоятки и приводную систему, которая, по меньшей мере, частично установлена на узле рукоятки. Рабочее соединение с узлом рукоятки выполнено для восприятия, по меньшей мере, двух независимых приводных движений от приводной системы, чтобы выполнять, по меньшей мере, два хирургических действия. Инструмент может дополнительно содержать индикатор, чтобы обеспечивать индикацию периода времени, который истек от приложения одного из управляющих движений, при сохранении возможности селективного приложения второго управляющего движения после того, как приложено первое управляющее движение. 2 н. и 9 з.п. ф-лы, 17 ил.
1. Хирургический отрезной и фиксирующий инструмент, содержащий:
узел рукоятки;
концевой эффектор, содержащий:
удлиненный желоб;
зажимной элемент, соединенный с удлиненным желобом с возможностью перемещения для селективного перемещения между разомкнутым и сомкнутым положениями; и
нож, установленный с возможностью перемещения в удлиненном желобе для селективного движения по удлиненному желобу;
смыкающую систему для селективного подведения смыкающего и размыкающего движений к упомянутому зажимному элементу;
приводную систему для селективного приложения приводного движения к упомянутому подвижному ножу, чтобы приводить упомянутый нож в движение из проксимального положения в дистальное положение в упомянутом удлиненном желобе; и
индикатор истекшего времени на, по меньшей мере, чем-то одном из упомянутого концевого эффектора и упомянутого узла рукоятки, чтобы обеспечивать индикацию периода времени, который истек после того, как упомянутый зажимной элемент переместился в упомянутое сомкнутое положение, при сохранении способности упомянутой приводной системы к селективному приложению упомянутого приводного движения к упомянутому подвижному ножу, причем
упомянутый индикатор истекшего времени содержит:
таймер и
группу из, по меньшей мере, двух световых индикаторов, электрически связанных с упомянутым таймером, при этом один упомянутый световой индикатор включается, когда упомянутый зажимной элемент переместился в упомянутое сомкнутое положение, и причем другой из упомянутых световых индикаторов включается после того, как истек первый предварительно заданный период времени после того, как упомянутый зажимной элемент переместился в упомянутое сомкнутое положение,
и хирургический отрезной и фиксирующий инструмент также содержит
кодер, выполненный с возможностью взаимодействия с цепью управления для вычисления стадии срабатывания ножа в концевом эффекторе, и цепь управления выполнена с возможностью посылать сигналы в световые индикаторы, чтобы обеспечивать индикацию местоположения ножа в концевом эффекторе.
2. Хирургический отрезной и фиксирующий инструмент по п.1, в котором упомянутый индикатор истекшего времени начинает повторный счет после каждого упомянутого хирургического действия.
3. Хирургический отрезной и фиксирующий инструмент по п.1, в котором упомянутая группа световых индикаторов содержит, по меньшей мере, три световых индикатора, при этом третий упомянутый световой индикатор включается после того, как истек второй предварительно заданный период времени после включения упомянутого другого из упомянутых световых индикаторов.
4. Хирургический отрезной и фиксирующий инструмент по п.3, в котором упомянутая группа световых индикаторов содержит, по меньшей мере, четыре световых индикатора, при этом четвертый световой индикатор включается после того, как истек третий предварительно заданный период времени после включения упомянутого третьего светового индикатора.
5. Хирургический отрезной и фиксирующий инструмент по п.4, в котором упомянутая группа световых индикаторов содержит, по меньшей мере, пять световых индикаторов, при этом пятый световой индикатор включается после того, как истек четвертый предварительно заданный период времени после включения упомянутого четвертого светового индикатора.
6. Хирургический отрезной и фиксирующий инструмент по п.5, в котором каждый их упомянутых первого, второго, третьего и четвертого предварительно заданных периодов времени составляет около пяти секунд.
7. Хирургический отрезной и фиксирующий инструмент по п.1, в котором упомянутый таймер установлен в упомянутом узле рукоятки.
8. Хирургический отрезной и фиксирующий инструмент по п.1, в котором каждый упомянутый световой индикатор содержит светоизлучающий диод.
9. Хирургический отрезной и фиксирующий инструмент по п.1, в котором упомянутый индикатор истекшего времени начинает повторный счет после приложения упомянутого приводного движения.
10. Хирургический отрезной и фиксирующий инструмент по п.9, в котором упомянутый индикатор истекшего времени начинает повторный счет, когда приложение упомянутого приводного движения прекращено.
11. Способ обработки хирургического отрезного и фиксирующего инструмента, при этом способ содержит следующие этапы:
обеспечивают хирургический отрезной и фиксирующий инструмент по любому из пп.1-10;
стерилизуют хирургический отрезной и фиксирующий инструмент; и
хранят хирургический отрезной и фиксирующий инструмент в стерильной таре.
| Способ определения температурного поля | 1991 |
|
SU1813207A3 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Силовоспроизводящее устройство для градуировки силоизмерительных датчиков на прокатных станах | 1990 |
|
SU1813209A3 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Сигнализатор уровня | 1991 |
|
SU1813202A3 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 5855312 A, 05.01.1999 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Хирургический сшивающий аппарат для наложения линейных швов | 1980 |
|
SU1042742A1 |
| Хирургический инструмент | 1977 |
|
SU733670A1 |

