Предлагаемое изобретение относится к области машиностроения и может быть использовано в качестве привода для трубопроводной запорной арматуры при наличии значительных сил сопротивления в трубопроводах диаметром до 400 мм и давлением до 250 атм.
Известен ручной двухскоростной привод для трубопроводной арматуры (см. патент №2378555 С2, F16К 31/53, 10.01.2009), содержащий зубчатую передачу, ведомое (выходное) колесо, связанное с механизмом перемещения запорного органа, маховик и переключатель скорости. Ведущий вал состоит из двух частей с закрепленными на них ведущими шестернями, разделенными переключателем скоростей, управляемым тягой, пропущенной сквозь соединенную с маховиком часть ведущего вала и кинематически связанной с дополнительным (переключающим) маховиком. К ведомым зубчатым колесам жестко присоединены звездочки цепной передачи, а переключатель скоростей подпружинен в сторону соединенной с маховиком части ведущего вала и выполнен в виде муфты.
Известен также двухскоростной ручной привод трубопроводной арматуры (см. патент №2343329 С2, F16K 31/53, 10.01.2009 г.), включающий размещенный в корпусе с крышкой планетарный механизм, выходное солнечное колесо которого закреплено на валу, связанном с механизмом перемещения запорного органа арматуры, маховик и переключатель скорости. Крышка корпуса планетарного механизма установлена в корпусе с возможностью вращения, маховик жестко закреплен на ней, а переключатель размещен на крышке с возможностью взаимодействия или с валом солнечного колеса планетарного механизма, или с его водилом.
Недостатками указанных приводов являются наличие металлоемких кинематических пар сложной конструкции, таких как зубчатые передачи и цепная передача, а также наличие дополнительных устройств переключения скоростей, что приводит к удорожанию устройства. Конструкции известных приводов имеют неизменное значение передаточного отношения при низкой скорости перемещения исполнительного звена и не позволяют в случае значительного возрастания силы сопротивления увеличить передаточное отношение для преодоления этих сил.
Техническая задача, решаемая в предлагаемом устройстве - снижение металлоемкости, уменьшение стоимости, повышение технологичности изготовления и обеспечение возможности повышение усилия на исполнительном звене в случае значительного превышения силами сопротивления ожидаемого значения.
Поставленная задача решается тем, что приводом для перемещения исполнительного звена при значительном сопротивлении является шарнирно-рычажный механизм, состоящий из двуплечего рычага, который поводком регулируемой длины соединяется с двумя шарнирно соединенными стержнями, работающими враспор.
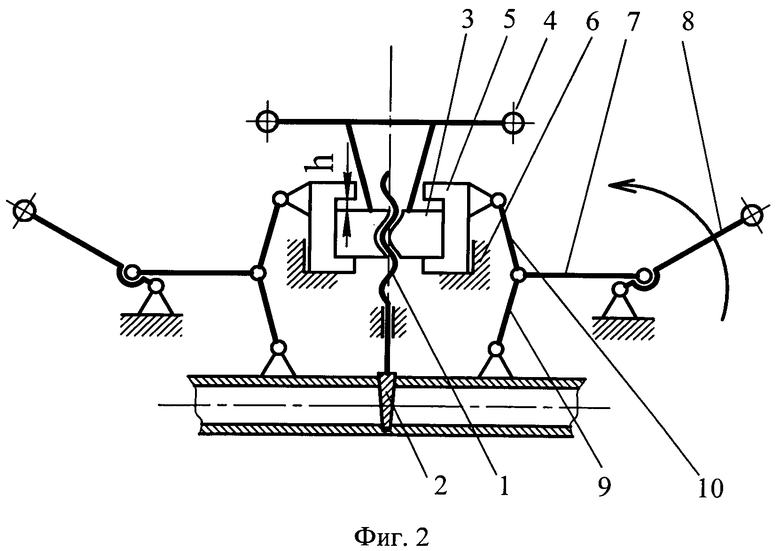
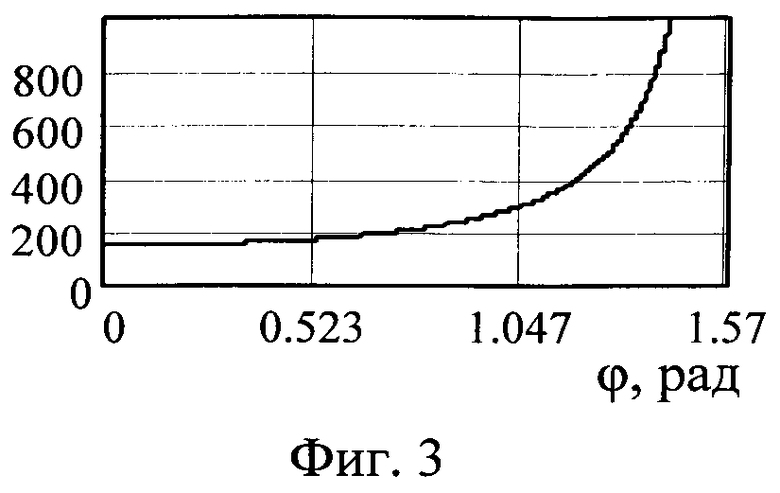
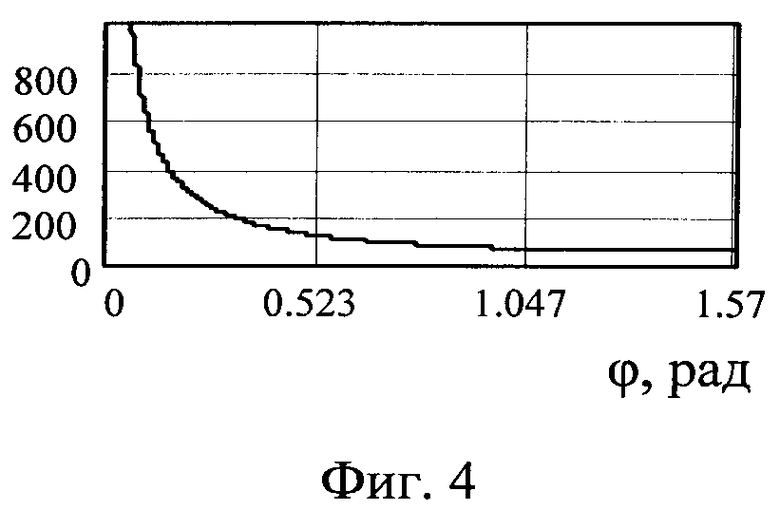
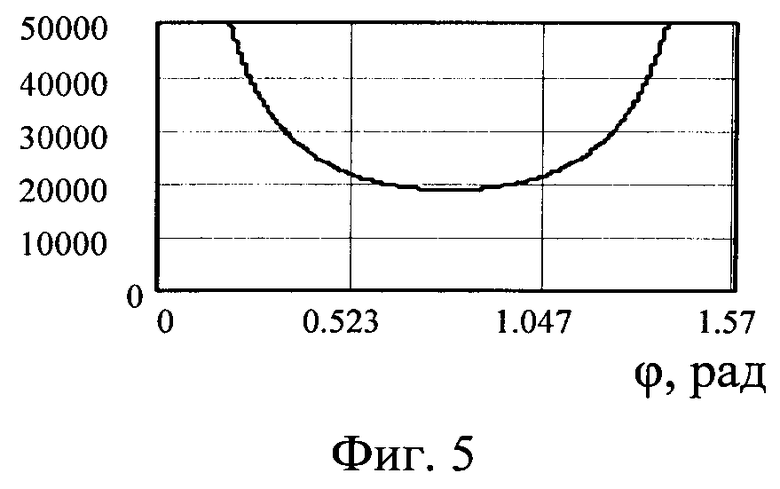
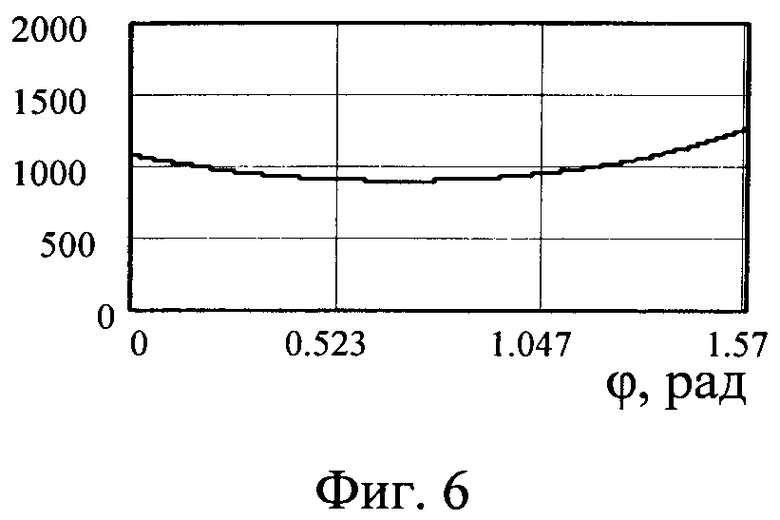
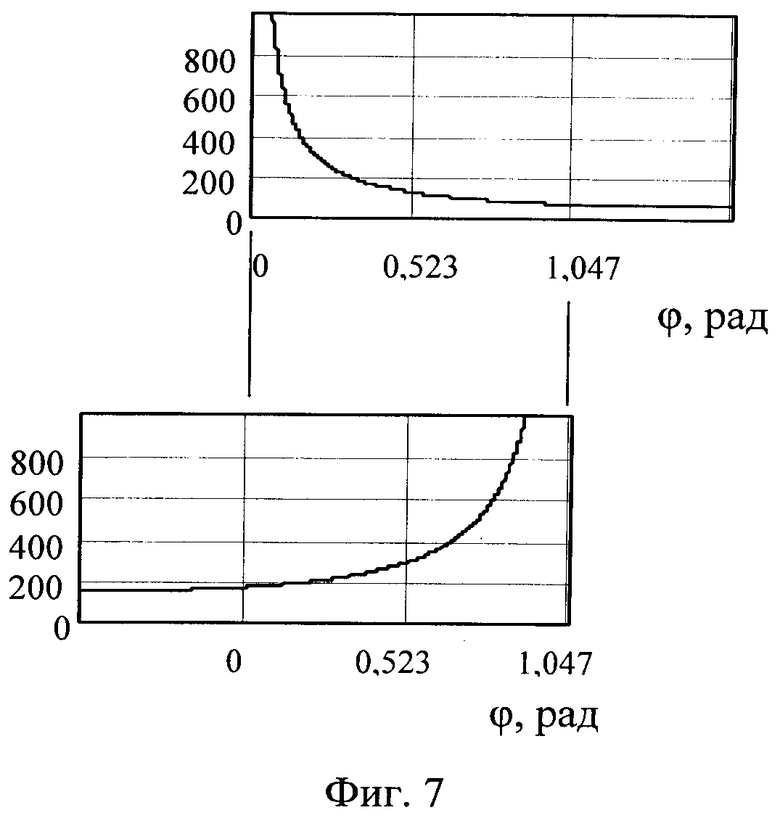
На фиг.1 изображена схема механизма предлагаемого привода с расположением звеньев, соответствующим заключительной стадии закрытия задвижки; на фиг.2 - схема механизма на начальной стадии открытия задвижки; на фиг.3 - зависимость кинематического передаточного отношения, обеспечиваемого работой соединенных враспор стержней 9 и 10 от угла поворота рычага 8; на фиг.4 - зависимость кинематического передаточного отношения, обеспечиваемого соотношением плеч рычага 8 от угла поворота рычага 8; на фиг.5 - зависимость кинематического передаточного отношения всего механизма, т.е. от совместного действия соединенных враспор стержней 9 и 10 и из-за соотношения плеч рычага 8, от угла поворота рычага 8; на фиг.6 - зависимость силового передаточного отношения всего механизма от угла поворота рычага 8; на фиг.7 - кинематическое передаточное отношение, обеспечиваемое работой соединенных враспор стержней 9 и 10 (верхний график), и кинематическое передаточное отношение, обеспечиваемое соотношением плеч рычага 8 (нижний график), и их совместное действие в случае удлинения поводка 7 на величину, обеспечивающую изменение исходного положения рычага 8 (см. фиг.1) на 0,523 рад (30°).
Привод для трубопроводной арматуры (фиг.1) содержит механизм перемещения исполнительного звена шпинделя 1 с клином 2, состоящий из гайки 3, приводимой во вращение посредством штурвала 4. Вращающаяся гайка 3 и обойма 5 образуют подшипниковый узел. Гайка 3 и обойма 5 установлены с зазором h. Обойма 5 вместе с гайкой 3 может перемещаться в корпусе 6 в вертикальном направлении. Рычаг 8 соединяется поводком 7 с парой распорных стержней 9 и 10, соединенных также между собой шарнирно.
Привод работает следующим образом.
Закрытие трубопроводной арматуры (фиг.1).
При закрытии, т.е. при движении вниз шпинделя 1 с клином 2, на большей части хода действует малое сопротивление движению. Поэтому выполняется быстрое перемещение исполнительных звеньев за счет вращения штурвала 4 с гайкой 3. В подшипниковом узле образуется зазор h ниже гайки. Звенья 9 и 10 занимают вертикальное положение. На окончательной стадии закрытия из-за контакта уплотнительных поверхностей клина и седла сила сопротивления движению значительно возрастает, что делает невозможным вращение штурвала оператором.
В этом случае оператор, поворачивая рычаг 8 по направлению дуговой стрелки, поводком 7 воздействует на соединение рычагов 9, 10 и перемещает подшипниковый узел со шпинделем и клином вниз. После этого поворачивает рычаг 8 в исходное положение, что при неподвижном штурвале 4 сопровождается образованием зазора h между гайкой 3 и обоймой 5, расположенного выше гайки 5. Вращая маховик, оператор перемещает гайку 3 и корпус 5 вверх по резьбе шпинделя, выбирая зазор h выше гайки и образуя такой зазор ниже гайки. Положение всех звеньев вновь соответствует изображенному на фиг.1
Описанные операции, начиная с поворота рычага 8 по дуговой стрелке, повторяются необходимое число раз до наступления необходимой степени уплотнения.
Открытие трубопроводной арматуры.
В начальный момент, соответствующий началу открытия задвижки, положение всех подвижных звеньев соответствует изображенному на фиг.2. Если вращение маховика 4 с гайкой 3 затруднено из-за заклинивания или иной силы сопротивления, то оператор поворачивает рычаг 8 по направлению дуговой стрелки, усилие через поводок 7 воздействует на стержни 9, 10, при повороте которых до вертикального положения элементы 1, 2, 3, 4, 5 перемещаются вверх. Если после этого возможно вращение штурвала 4 с гайкой 3, которое сопровождается поднятием шпинделя 1 с клином 2, то вращением штурвала открытие продолжается с высокой скоростью, определяемой конструктивными параметрами резьбы.
Если значительная сила сопротивления продолжает препятствовать перемещению исполнительного звена и поворот штурвала затруднен, то рычаг 8 возвращается в исходное положение. Вращением штурвала с гайкой они опускаются по резьбе шпинделя вниз до упора гайки в обойму 5, после чего все звенья механизма занимают исходное положение (см. фиг.2). Теперь поворот рычага 8 по дуговой стрелке и все другие описанные операции повторяются необходимое число раз до наступления возможности поднимать клин вращением штурвала.
Рычажный привод при закрытии задвижки работает так, что на начальной стадии поворота рычага 8 по направлению дуговой стрелки (см. фиг.1) выигрыш в силе обеспечивается главным образом за счет работы стержней 9 и 10 (первый эффект). При этом передаточное отношение (ось ординат на фиг.3) по мере поворота рычага 8, т.е. с увеличением угла φ, постепенно снижается: эффект уменьшается. На заключительной стадии движения рычага 8 выигрыш в силе обеспечивается главным образом за счет действия самого двуплечего рычага 8 (второй эффект). По мере увеличения угла φ передаточное отношение постепенно увеличивается (ордината на фиг.4), т.е. второй эффект возрастает с увеличением угла φ. Итоговая зависимость кинематического передаточного отношения от угла поворота рычага 8 представлена на фиг.5. На начальной стадии поворота рычага 8 (при малых значениях угла φ) высокое значение кинематического передаточного отношения достигается за счет первого эффекта, а на заключительной стадии - за счет второго эффекта.
Зависимость силового передаточного отношения от угла поворота рычага 8 представлена на фиг.6 и демонстрирует незначительное различие этого показателя для разных стадий.
Если окажется, что усилия оператора все-таки недостаточно, то оператор удлиняет поводок 7 на величину, значение которой не превышает длины короткого плеча двуплечего рычага 8. Это приводит к тому, что выигрыш в силе за счет работы стержней 9 и 10 и за счет работы рычага 8 происходит хотя и по-прежнему поочередно, но эффективнее: выигрыш в силе от первого эффекта еще упал незначительно, а уже начинает действовать второй эффект. Это приводит к значительному увеличению передаточного отношения. Это наложение эффектов проиллюстрировано фиг.7 и фиг.8: участки графиков изображены смещенными. Участки графиков, расположенные друг под другом, свидетельствуют о том, что взаимодействуют два эффекта тогда, когда передаточные числа обоих имеют высокие значения.
Примечание. Все расчетные зависимости, полученные с использованием уравнения Лагранжа и программы Mathcad, представлены на фиг.3-7 для следующих условий. Длина рычага 8 (фиг.1) - 300 мм, длина короткого плеча рычага 8-2 мм, длина звеньев 9 и 10-80 мм, диаметр всех цапф (в соединениях звеньев) - 20 мм, коэффициент трения в цилиндрических цапфах - 0,1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ РУЧНОГО ИМПУЛЬСНОГО РЕГУЛИРУЕМОГО ПРИВОДА И РУЧНОЙ ИМПУЛЬСНЫЙ РЕГУЛИРУЕМЫЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2011 |
|
RU2484350C2 |
| УНИВЕРСАЛЬНЫЙ КЛАПАН-ЗАТВОР | 2002 |
|
RU2238465C2 |
| СИЛОВАЯ СТУПЕНЬ ДЛЯ РУЧНОГО ПРИВОДА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2009 |
|
RU2416051C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩИМ ОРГАНОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ И СПОСОБ НАСТРОЙКИ ЕГО ОГРАНИЧИТЕЛЯ МАКСИМАЛЬНОГО КРУТЯЩЕГО МОМЕНТА | 2005 |
|
RU2273784C1 |
| УНИВЕРСАЛЬНЫЙ КЛИНОВОЙ ЗАТВОР | 2002 |
|
RU2238464C2 |
| ПРИВОД КЛАПАНА КРАНОВОГО ТИПА И РУЧНОЙ ДУБЛЕР ПРИВОДА | 2000 |
|
RU2179681C2 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| РУЧНОЙ ДВУХСКОРОСТНОЙ ПРИВОД ДЛЯ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2008 |
|
RU2378555C2 |
| ПРИВОД ЧЕТВЕРТЬОБОРОТНОЙ АРМАТУРЫ | 2015 |
|
RU2600027C2 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2008 |
|
RU2364780C1 |
Изобретение относится к области машиностроения и может быть использовано в качестве привода трубопроводной запорной арматуры при наличии значительных сил сопротивления. Ручной привод для трубопроводной арматуры характеризуется тем, что для перемещения исполнительного звена при значительном сопротивлении используется шарнирно-рычажный механизм. Указанный шарнирно-рычажный механизм состоит из двуплечего рычага, который поводком соединяется с двумя соединенными шарнирно стержнями, работающими враспор. Изобретение направлено на снижение металлоемкости, уменьшение стоимости, повышение технологичности изготовления и обеспечение возможности повышение усилия на исполнительном звене в случае значительного превышения силами сопротивления ожидаемого значения. 1 з.п. ф-лы, 7 ил.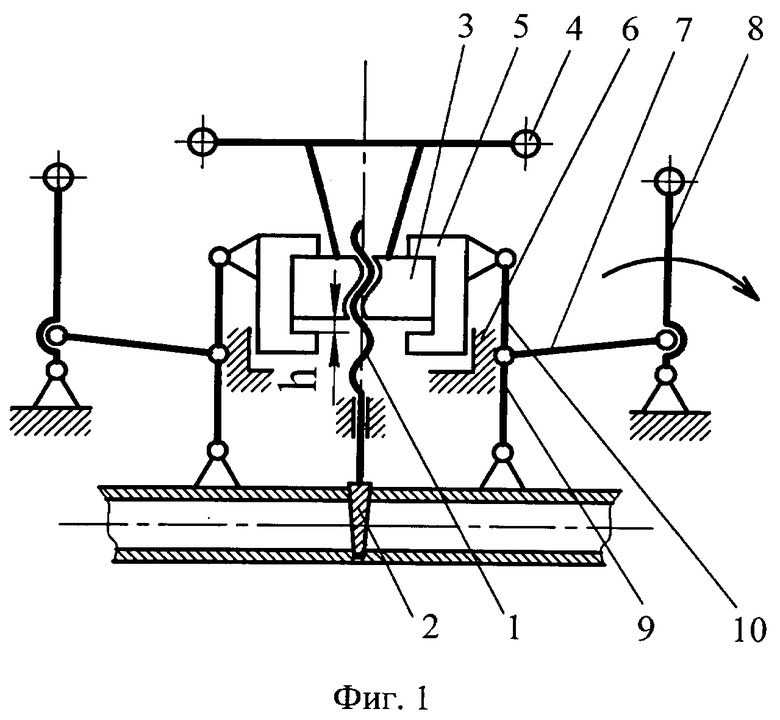
1. Ручной привод для трубопроводной арматуры, характеризующийся тем, что для перемещения исполнительного звена при значительном сопротивлении используется шарнирно-рычажный механизм, состоящий из двуплечего рычага, который поводком соединяется с двумя соединенными шарнирно стержнями, работающими враспор.
2. Ручной привод для трубопроводной арматуры по п.1 характеризуется тем, что поводок имеет регулируемую длину.
| Устройство для управления задвижкой | 1982 |
|
SU1167392A1 |
| Кузнечно-штамповочное оборудование | |||
| А.Н.Банкетов и др., - 2-е издан | |||
| перераб | |||
| и доп.; М.Машиностроение, 1982, 576с | |||
| Узловязатель | 1950 |
|
SU91399A1 |
| US 20080191158 A1, 14.08.2008 | |||

