Изобретения относятся к трубопроводной арматуре и могут быть использованы в качестве исполнительного механизма для управления шаровыми кранами магистральных газопроводов.
Известен привод поворотного клапана с ручным дублером привода (см. заявку РФ на изобретение 97100388/06 от 06.01.97, МПК 6 F 16 К 31/33), который содержит следующие признаки.
Привод:
1. Корпус, выполненный с возможностью установки на клапане;
2. Реверсивный электродвигатель;
3. Механизм передач в виде червячного колеса, установленного для вращения в корпусе и выполненного с возможностью соединения с штоком клапана для сообщения ему вращательного движения, и червячного вала, установленного с возможностью вращения и ограниченного перемещения в корпусе;
4. Средства соединения двигателя с червячным валом.
Узел ручного дублера привода:
1. Маховик;
2. Шток;
3. Устройство задействования маховика.
Признаки 1, 3 привода и 1, 2, 3 ручного дублера аналога совпадают с существенными признаками заявляемого изобретения.
Причиной, препятствующей получению требуемого технического результата, является невозможность использования реверсивного электродвигателя в условиях отсутствия оснащения магистрального газопровода линией электроснабжения промышленных параметров 220/380 В, 50 Гц.
Наиболее близким по совокупности существенных признаков является поворотный пневмопривод с ручным дублером (см. патент РФ на изобретение 2047805 С1 от 10.11.95, МПК 6 F 16 K 31/14), принятый за прототип, который содержит следующие признаки.
Привод:
1. Корпус привода;
2. Пневмодвигатель;
3. Пневмодвигатель поршневого типа, поступательного действия, реверсивный;
4. Механизм передач, ведущий элемент которого связан с пневмодвигателем, а ведомый - с поворотным затвором регулирующего органа;
5. Ведущим элементом механизма передач является внешняя часть штока поршневого пневмодвигателя, выполненная в виде червяка;
6. Червячная часть штока при использовании пневмодвигателя работает в качестве зубчатой рейки, взаимодействующей с зубчатым колесом;
7. Ведомым элементом механизма передач является зубчатое колесо, зацепляющееся с червяком.
Ручной дублер привода:
1. Маховик на валу;
2. Маховик, связанный с червячной частью штока пневмодвигателя;
3. Устройство задействования ручного дублера;
4. Устройство задействования ручным дублером, выполненное в виде тормозного устройства для стопорения штока пневмодвигателя от осевых перемещений.
Признаки 1, 2, 4 привода и 1, 3 ручного дублера прототипа совпадают с существенными признаками заявляемого изобретения.
Причинами, препятствующими получению требуемого технического результата, являются следующие.
1. Невозможность функционирования привода от ручного дублера за счет физических сил одного рабочего (оператора) в связи с малой величиной передаточного числа механизма передач в режиме ручного дублирования.
2. Непригодность пневмодвигателя поступательного действия в приводе с большим передаточным числом механизма передач ввиду ограниченности величин хода и скорости штока пневмодвигателя. Это препятствует требованию сокращения времени поворота затвора клапана.
3. Отсутствие устройств, обеспечивающих плавность соединения пневмодвигателя с механизмом передач и отсоединения от механизма передач - в режиме работы привода от ручного дублера.
4. Отсутствие автоматичности устройства задействования ручного дублера, что снижает безопасность привода.
5. Отсутствие в ручном дублере устройств, предназначенных для сокращения времени поворота затвора клапана, если учитывать, что момент сопротивления повороту затвора заметно уменьшается по величине после страгивания с места (преодоление трения покоя).
Задачей заявляемого изобретения является создание надежного привода клапана кранового типа (шарового крана) с удобным и безопасным ручным дублером для магистрального газопровода при условии использования энергии сжатого транспортируемого газа, а в аварийной ситуации (в режиме ручного дублирования) - за счет физических сил одного рабочего (оператора).
Сущность предлагаемого изобретения заключается в следующем.
Привод клапана кранового типа содержит корпус, по меньшей мере один пневмодвигатель, закрепленный на корпусе и механизм передач. Ведущий элемент механизма передач связан с пневмодвигателем, а ведомый - с поворотным затвором клапана. Привод, кроме того, снабжен ручным дублером привода, связанным с одним из кинематических звеньев механизма передач.
От прототипа заявляемый привод отличается тем, что содержит два нереверсивных пневмодвигателя вращательного действия. Механизм передач составлен из последовательно связанных зубчатых передач в количестве, обеспечивающем такую величину передаточного числа, чтобы один оператор смог вручную закрыть или открыть клапан в аварийной ситуации. Каждый пневмодвигатель связан с одним из концов ведущего элемента механизма передач посредством пусковой муфты, что обеспечивает плавность соединения пневмодвигателя с механизмом передач.
В ручном дублере привода, содержащем маховик и вал, связанный с одним из кинематических звеньев механизма передач, а также устройство задействования ручного дублера, маховик снабжен рукояткой с возможностью регулирования плеча приложения силы, что способствует сокращению времени поворот затвора клапана, вал ручного дублера установлен внутри трубообразного кронштейна, а устройство задействования ручного дублера выполнено в виде самоуправляемой муфты, дающей возможность автоматического соединения маховика и вала ручного дублера.
В целом заявляемые изобретения позволяют повысить эффективность, надежность и безопасность привода клапана кранового типа и ручного дублера привода.
Устройство поясняется чертежами.
На фиг.1 показана конструктивная схема привода клапана кранового типа и ручной дублер привода.
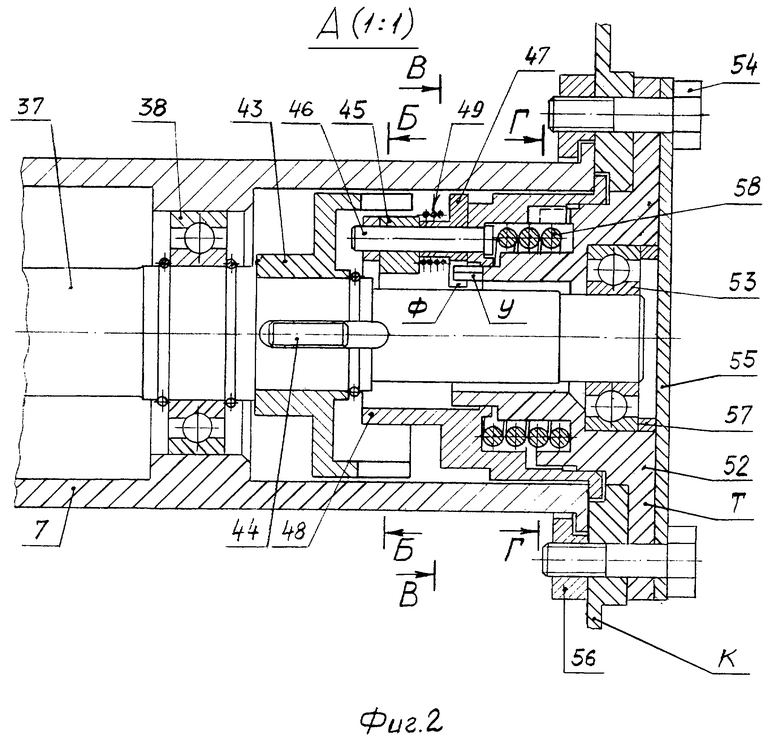
На фиг. 2 - выносной элемент А (фиг.1), где изображена конструкция устройства задействования ручного дублера (самоуправляемая муфта).
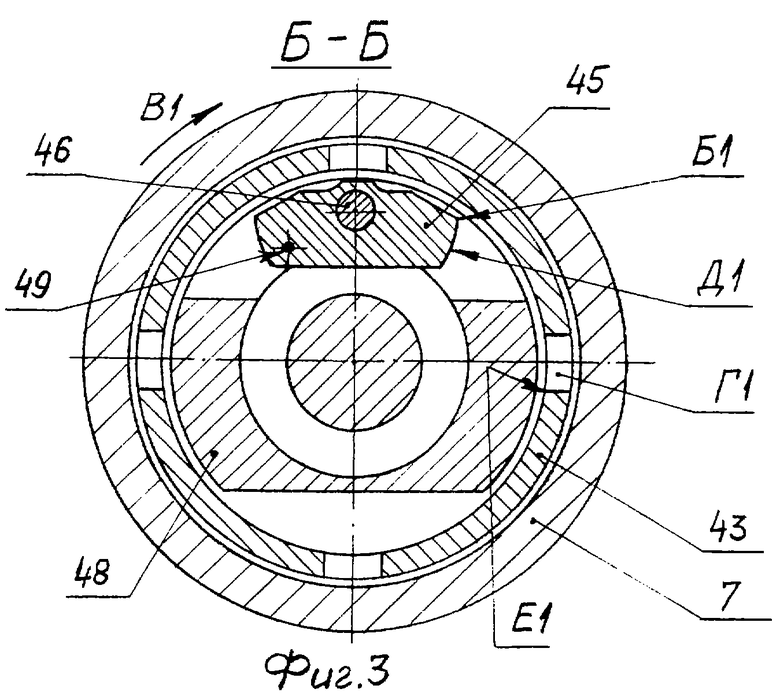
На фиг.3 - разрез Б-Б (фиг.1) по храповику и собачке.
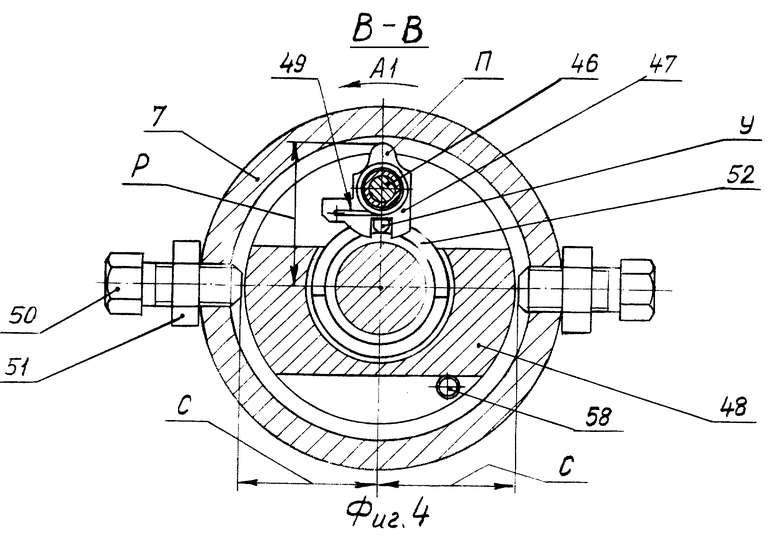
На фиг.4 - разрез В-В (фиг.1) по поводку, пружине кручения и управляющим элементам (винтам), взаимодействующим с поводком.
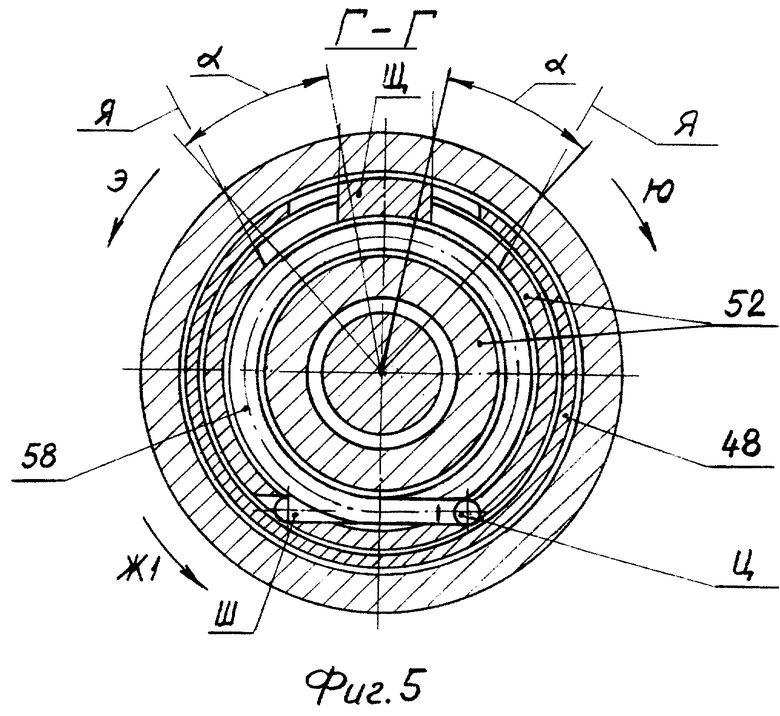
На фиг.5 - разрез Г-Г (фиг.1) по втулке и водилу с показом пружины кручения и углов закрутки пружины.
Привод содержит пылевлагозащитный корпус 1 сварной конструкции, состоящий из ряда отсеков. В нижней части корпус 1 посредством крепежных деталей 2 неподвижно скрепляется с фланцем Д клапана (шарового крана) 3. В верхней части к корпусу 1 посредством крепежных деталей прикреплены пневмодвигатели 4, 5. С правой стороны на фиг.1 размещен ручной дублер 6, установленный на корпусе 1 посредством кронштейна 7 трубообразной формы, прикрепленного к корпусу.
В нижнем отсеке корпуса 1 размещена планетарная передача, непосредственно связанная с поворотным затвором 8 клапана 3. Регулирующая часть поворотного затвора 8 имеет сферическую (шаровую) форму и находится внутри клапана 3.
Планетарная зубчатая передача состоит из водила 9, ступица Е которого через шпонку 10 неподвижно связана с поворотным затвором 8, сателлитов 11, внутреннего центрального колеса 12 и наружного центрального колеса 13, неподвижно прикрепленного к корпусу 1. Описанная конструкция передачи показана на фиг.1 с изображением двух сателлитов 11, что условно обозначает четное их количество в передаче.
В отсеках корпуса 1, расположенных выше над передачей, непосредственно связанной с поворотным затвором 8, размещены еще три планетарные передачи с нечетным числом сателлитов. Условно это обозначается показом в схеме (фиг.1) одного сателлита. Наружные центральные колеса 14, 15, 16 этих передач неподвижно связаны с корпусом 1. Сателлиты 17, 18, 19 взаимодействуют с водилами 20, 21, 22, при этом водило 20 неподвижно связано с внутренним центральным колесом 12 - эти детали составляют единое кинематическое звено. Аналогично единые кинематические звенья составляют связанные неподвижно внутреннее центральное колесо 23 и водило 21, а также внутреннее центральное колесо 24 и водило 22.
Все четыре планетарных передачи кинематически связаны последовательно и выполнены по типу 2К-Н (по классификации Кудрявцева В.Н.).
Внутреннее центральное колесо 25 верхней планетарной передачи неподвижно связано с ведомым зубчатым коническим колесом 26, состоящим в зацеплении с ведущим коническим колесом 27. Колеса 26, 27 размещены в отдельном отсеке корпуса 1 и составляют коническую передачу.
Ведущее коническое колесо 27 неподвижно связано с ведомым валом 28 цилиндрической передачи, в которую входят ведомое колесо 29, промежуточное колесо 30 и ведущее колесо 31. Ведомое колесо 29 неподвижно связано с валом 28, а ведущее колесо 31 - с валом 32, снабженным двумя выходными концами.
Все описанные передачи - цилиндрическая (с колесами 29, 30, 31), коническая (с колесами 26, 27), а также четыре планетарные - в целом составляют механизм передач (на чертежах не обозначено отдельной выноской). Все передачи связаны последовательно, ведущим элементом механизма передач является вал 32, а ведомым - водило 9 нижней планетарной передачи. Механизм передач предназначен для согласования (по величине) момента сопротивления повороту затвора 8 клапана с тяговыми возможностями (крутящим моментом) пневмодвигателя, а также с физическими возможностями оператора - при ручном дублировании. Для газопровода с условным проходным сечением 1 м при давлении транспортируемого газа 8,5 МПа расчетный момент сопротивления повороту шарового затвора составляет 27000 кГс•м. Указанной величиной момента, а также компоновочными соображениями обусловлен набор входящих в механизм зубчатых передач. Как следствие, передаточное число механизма передач привода в режиме ручного дублирования составляет, примерно, 6000.
Пневмодвигатели 4, 5 одинаковы, работают за счет энергии сжатого газа, транспортируемого по газопроводу.
По типу пневмодвигатели нереверсивные, струйно-реактивные, вращательного действия. Названная нереверсивность диктует необходимость применения в приводе двух пневмодвигателей.
Каждый из двигателей 4, 5 имеет выходной вал 33.
Оба конца вала 32 снабжены дисками 34, посаженными на вал неподвижно. Такими же дисками 35 снабжены валы 33 пневмодвигателей. В целом детали 34, 35 составляют пусковую дисковую муфту фрикционного типа. При неработающем пневмодвигателе пусковая муфта разомкнута благодаря зазору между дисками 34, 35 (фиг. 1). В моторном режиме работы привода валы 33 автоматически за счет встроенных поршневых пневмодвигателей имеют возможность выдвижения по стрелкам Ж до соприкосновения дисков 34, 35. Таким образом обеспечивается плавность соединения работающего пневмодвигателя 4 или 5 с ведущим элементом (валом) механизма передач. Применение пусковых муфт повышает надежность привода.
Ручной дублер 6 содержит маховик 36 сварной конструкции, составленный из кольцеобразного обода И, соединенного с диском К. Кроме того, ручной дублер 6 содержит вал 37, установленный на двух шарикоподшипниках 38 (фиг.2) внутри кронштейна 7 (фиг. 1, 2), связанный с валом 28 (фиг.1) механизма передач посредством компенсирующей зубчатой муфты 39 (фиг.1). Обод И служит для приложения силы обеих рук оператора, когда необходимо преодолеть момент трения покоя шарового затвора 8, стронуть затвор. При дальнейшем повороте величина преодолеваемого момента заметно уменьшается, поэтому для более удобной работы и сокращения времени на выполнение операции открывания (закрывания) клапана маховик 36 ручного дублера 6 снабжен рукояткой 40 (фиг. 1) с возможностью регулирования величины плеча приложения силы, показанного на фиг. 1 как расстояние Л от оси вала 37 до оси рукоятки 40. Рукоятка 40 имеет возможность перемещения по стрелке М к центру маховика по пазу Н диска К маховика. Для фиксации рукоятки 40 в нужном месте служит гайка 41.
Для соединения маховика 36 с валом 37 служит устройство задействования ручного дублера, выполненное в виде самоуправляемой муфты 42 (фиг.1, 2).
Самоуправляемая муфта 42 обеспечивает автоматичность соединения маховика 36 с валом 37 только в случае воздействия оператора на обод И или рукоятку 40 маховика. С прекращением воздействия рассоединение происходит автоматически. Такое свойство муфты обеспечивает повышение эффективности и безопасности привода. Самоуправляемая муфта 42 размещена справа внутри трубообразного кронштейна 7 (фиг.1, 2). Одна из основных деталей муфты - храповик 43 (фиг. 2, 3), неподвижно соединенный с валом 37 посредством шпонки 44. Для возможного воздействия на храповик 43 предназначена собачка 45 (фиг.2, 3), имеющая симметричную форму (фиг.3) и поэтому имеющая возможность воздействия на храповик 43 как в одну, так и в другую сторону. Собачка 45 отличается свойством двустороннего действия. Собачка 45 подвижно установлена на оси 46 (фиг. 2, 3, 4). Справа от собачки 45 (фиг.2) подвижно посажен на ось 46 поводок 47 (фиг.2, 4). Ось 46 установлена в отверстии водила 48 (фиг.2, 3, 4) параллельно с осью вала 37 (фиг.2).
Собачка 45 и поводок 47, размещенные рядом на оси 46, взаимосвязаны друг с другом посредством пружины кручения 49 (фиг.2, 3, 4), которая центрируется по поводку 47 (фиг.2), а отогнутые концы (зацепы) пружины входят, с одной стороны, в собачку 45 (фиг.3), а с другой стороны - в поводок 47 (фиг.4).
Кроме того, поводок 47 имеет возможность взаимодействия своим выступом П (фиг. 4) с управляющими элементами (винтами 50) (фиг.4), установленными на резьбе в кронштейне 7, выступающими внутрь кронштейна своими рабочими концами и застопоренными гайками 51. Взаимодействие обусловлено тем, что размер Р (фиг.4) от оси до выступа П превышает размеры С.
Водило 48 (фиг.2) подвижно связано и сцентрировано с втулкой 52 (фиг.2, 4, 5), которая через подшипник 53 (фиг.2) установлена на правом конце вала 37 (фиг.2), кроме того, фланцем Т посредством болтов 54 вместе с крышкой 55 и осевым фиксатором 56 крепится к диску К (фиг.1, 2) маховика 36. Втулка 52 взаимодействует с поводком 47 (фиг.2, 4) благодаря тому, что выступ У (фиг. 2, 4) на левом конце втулки 52 подвижно сопрягается с пазом Ф (фиг.2) в нижней части поводка 47. Кольцо 57 фиксирует подшипник 53 (фиг.2) от смещения.
Втулка 52 и водило 48 (фиг.2) взаимосвязаны друг с другом посредством пружины кручения 58 (фиг.2, 4, 5), которая одним зацепом Ц (фиг.5) входит в водило 48 (фиг.4), а другим зацепом Ш (фиг.5) - во втулку 52.
Внутренний выступ Щ (фиг.5) водила 48 предназначен для ограничения величины упругой деформации пружины кручения 58 углом α при закручивании (раскручивании) пружины по направлениям, указанным стрелками Э, Ю (фиг.5). Дальнейшей деформации пружины препятствуют уступы Я (фиг.5), принадлежащие втулке 52.
Грузики 59 (фиг.1) ставятся на диск К маховика 36 в необходимом количестве для обеспечения статической сбалансированности маховика.
При работе привода в моторном режиме (от пневмодвигателей), например, при открывании клапана 3 затвором 8, сжатый газ направляется в пневмодвигатель 4 (фиг.1) через патрубок 60. При этом вал 33 приходит во вращение, и кроме того, перемещается вправо по стрелке Ж до соприкосновения дисков 34 и 35 пусковой муфты. Отработавший газ выбрасывается из пневмодвигателя 4 в атмосферу через патрубок 61. Под действием момента трения соприкасающихся дисков 34, 35 пусковой муфты приводится во вращение ведущий элемент механизма передач - вал 32. Далее через последовательно связанные передачи (цилиндрическую, коническую, планетарные) вращение от вала 32 сообщается водилу 9 и через шпонку 10 сообщается поворотному затвору 8 клапана 3. После завершения открывания клапана 3 прекращается подача сжатого газа в пневмодвигатель 4, тогда вал 33 автоматически возвращается в исходное положение, а диски 34, 35 пусковой муфты расходятся.
Работа по закрыванию клапана 3 затвором 8 проходит аналогично описанной выше, но при подаче сжатого газа по входному патрубку пневмодвигателя 5 и с вращением всех кинематических элементов механизма передач в противоположном направлении.
При работе привода от ручного дублера 6 (фиг.1) усилие оператора прикладывается к ободу И или рукоятку 40 маховика 36. Вращение маховика на подшипнике 52 через диск К (фиг.1, 2) сообщается связанной с ним втулке 52 (фиг. 2), а от втулки 52 через пружину кручения 58 передается на водило 48.
Во вращательное движение относительно оси вала 37 приходит собачка 45 и поводок 47, связанные пружиной кручения 49 и размещенные на оси 46, установленной в водиле 48. Таким образом, во вращение вместе с маховиком 36 приходят все детали самоуправляемой муфты 42 (фиг.2): втулка 52, водило 48, ось 46, собачка 45, поводок 47 и пружины 49, 58. Муфта 42 вращается как одно целое.
Вращение муфты 42 внутри неподвижного кронштейна 7 по направлению, указанному стрелкой А1 (фиг.4), соответствует закрыванию клапана 3 (фиг.1). В процессе вращения выступ П поводка 47 (фиг.4) приближается к левому винту 50, который функционально служит управляющим элементом, и вступает с ним во взаимодействие, так как расстояние Р превышает длину С (как было указано выше). Сила взаимодействия управляющего элемента (винта 50) и поводка 47 создает через выступ П момент поворота поводка 47 относительно оси 46, направленный по часовой стрелке (фиг.4). При этом выступ У втулки 52 (фиг.2, 4), взаимодействуя с пазом Ф (фиг.2) поводка 47 также в направлении стрелки А1 (фиг. 4), создает момент поворота поводка 47, также направленный по часовой стрелке относительно оси 46.
Суммарный момент поворота поводка 47 (от воздействия на него винта 50 и выступа У втулки 52) приводит к развороту поводка по часовой стрелке относительно оси 46 на угол, позволяющий поводку разойтись с препятствием в виде винта 50. Разворот поводка 47 (по часовой стрелке) имеет два следствия. Во-первых, деформируется на закручивание пружина 49 (фиг.4), связанная зацепом с поводком 47. При этом другой зацеп пружины 49 воздействует на собачку 45 (фиг. 3), ввиду чего последняя разворачивается на оси 46 против часовой стрелки до соприкосновения выступа Б1 с внутренней цилиндрической поверхностью храповика 43. Такое соприкосновение собачки 45 с храповиком 43 продолжится до тех пор, пока собачка 45, перемещаясь по стрелке В1 относительно неподвижного храповика 43, не заскочит своим выступом Б1 в паз Г1 храповика 43 и ее рабочая поверхность Д1 не упрется в кромку Е1 паза Г1 храповика 43. Однако после упора собачки 45 в храповик 43, последний вместе с валом 37 (фиг.2) остается неподвижным, так как удерживается в покое моментом сопротивления повороту затвора 8, приведенным к валу 37. Остановится лишь водило 48 (фиг.2, 3, 4, 5).
Во-вторых, остановка водила 48 приведет к нарастанию деформации раскручивания пружины 58 (фиг.2, 5) ввиду продолжения поворота втулка 52 (фиг.5) в направлении стрелки Ж1. Пропорционально величине деформации нарастает крутящий момент в пружине по величине меньшей, чем момент сопротивления повороту затвора 8, приведенный к валу 37. После упирания уступа Я втулки 52 (фиг. 5) в выступ Щ водила 48 прекращается деформация пружины 58 и тогда момент кручения с маховика 36 через втулку 52 напрямую воздействует на водило 48, далее через ось 46 и собачку 45 - на храповик 43, и через шпонку 44 сообщается валу 37 ручного дублера 6, приводя вал во вращение. Вращение вала 37 (фиг. 1) через муфту 39, вал 28, коническую передачу и планетарные передачи сообщается поворотному затвору 8 клапана 3.
После завершения закрывания клапана 3 оператор прекращает воздействие на маховик 36. Тогда сформированная ранее пружина 58 (фиг.2, 5), стремясь возвратиться в исходное ненагруженное состояние, воздействует на втулку 52, поворачивает втулку вместе с маховиком 36 на подшипнике 53 в направлении, противоположном стрелке Ж1. Поэтому выступы У втулки 52 (фиг.2, 4), взаимодействуя с пазом Ф (фиг.2) поводка 47, возвращает последний в исходное положение, как показано на фиг.4.
Пружина 49 (фиг. 2, 4) воздействует на собачку 45, возвращая ее в исходное положение, как показано на фиг.3.
На этом выключение самоуправляемой муфты 42 заканчивается. Маховик 36 ручного дублера отсоединен от вала 37.
При выполнении операции открывания клапана 3 самоуправляемая муфта 42 вращается в направлении, противоположном стрелке А1 (фиг.4), при этом выступ П поводка 47 взаимодействует с винтом 50, показанным справа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ТРУБОПРОВОДНОЙ ЗАПОРНОЙ АРМАТУРЫ | 1998 |
|
RU2132990C1 |
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2154219C1 |
| ЭЛЕКТРОМОТОРНЫЙ ПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 1996 |
|
RU2103582C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| ЭЛЕКТРОПРИВОД | 2004 |
|
RU2258168C1 |
| ЭЛЕКТРОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 2002 |
|
RU2239116C2 |
| Электропривод трубопроводной арматуры с ручным дублером | 1980 |
|
SU974008A1 |
| ЭЛЕКТРОМОБИЛЬ | 2001 |
|
RU2205115C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2005 |
|
RU2307419C2 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
Изобретения относятся к трубопроводной арматуре и предназначены в качестве исполнительного механизма для управления шаровыми кранами магистральных газопроводов. Привод содержит корпус, два пневмодвигателя, закрепленных на корпусе, механизм передач, ведущий элемент которого связан с пневмодвигателем, а ведомый - с поворотным затвором клапана, и ручной дублер привода, который связан с одним из кинематических звеньев механизма передач. Пневмодвигатели выполнены нереверсивными вращательного действия и связаны посредством пусковых муфт с противоположными концами ведущего элемента механизма передач, состоящего из последовательно соединенных зубчатых передач. Ручной дублер привода содержит маховик, вал и устройство задействования ручного дублера привода. Маховик снабжен рукояткой, установленной с возможностью регулирования величины плеча приложения силы. Вал ручного дублера установлен внутри трубообразного кронштейна. Устройство задействования ручного дублера выполнено в виде самоуправляемой муфты, дающей возможность соединения маховика с валом дублера. Изобретения позволяют создать надежный привод клапана кранового типа (шарового крана) с удобным и безопасным ручным дублером для магистрального газопровода при условии использования энергии сжатого транспортируемого газа, а в аварийной ситуации (в режиме ручного дублирования) - за счет физических сил одного рабочего (оператора). 2 с. и 5 з.п.ф-лы, 5 ил.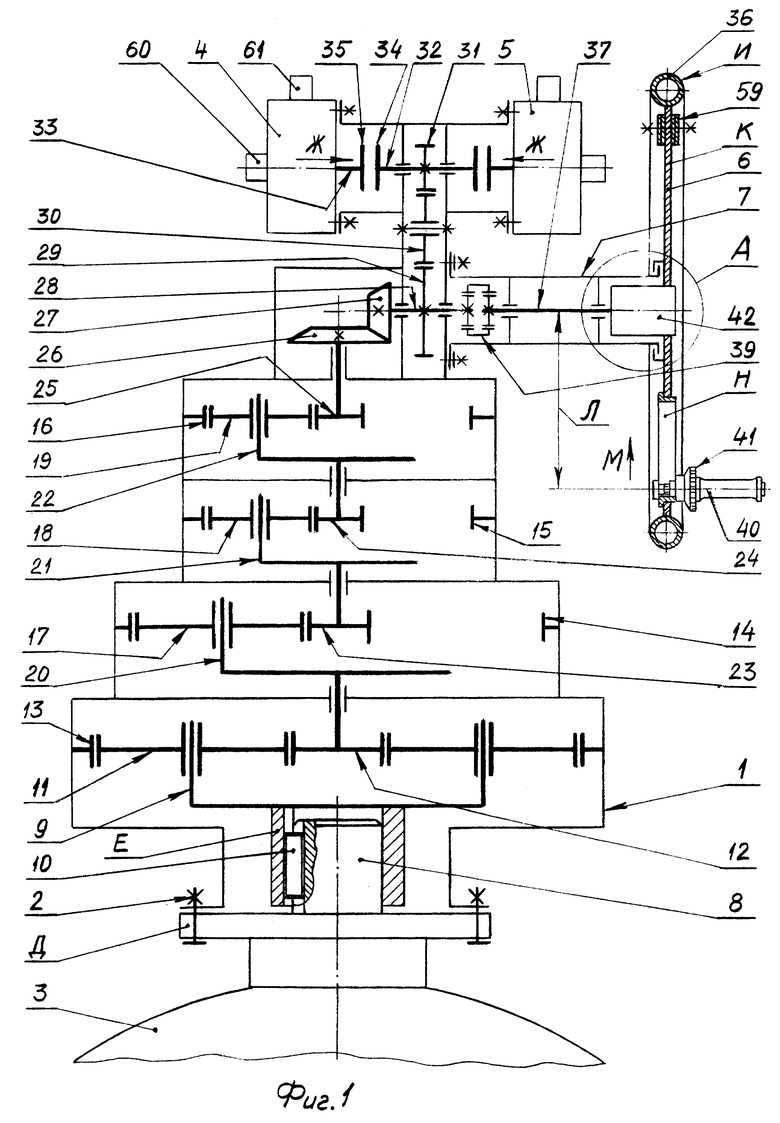
| ПОВОРОТНЫЙ ПНЕВМОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 1992 |
|
RU2047805C1 |
| ПРИВОД ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ РЮД | 1996 |
|
RU2108513C1 |
| ЗАДВИЖКА С РУЧНЫМ УПРАВЛЕНИЕМ | 1991 |
|
RU2022194C1 |
| МИКРОПРОГРАММНЫЙ АВТОМАТ | 1991 |
|
RU2018937C1 |
| US 4380325 А, 19.04.1983 | |||
| US 3524526 А, 18.08.1970 | |||
| СПОСОБ ПРОГНОЗИРОВАНИЯ ЭФФЕКТИВНОСТИ НИЗКОИНТЕНСИВНОЙ ЛАЗЕРНОЙ ТЕРАПИИ ПРИ СЕКРЕТОРНОЙ АСТЕНОЗООСПЕРМИИ | 2020 |
|
RU2748895C1 |
| Устройство для изготовления минеральной ваты | 1976 |
|
SU656497A3 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |

