Область техники. Предлагаемая взаимосвязанная группа технических решений относится к области машиностроения и предназначена для использования предпочтительно в качестве ручного привода или в качестве ручного дублера привода запорной и регулирующей трубопроводной арматуры со средними и большими значениями момента закрытия/открытия, хотя может быть также использована в другом назначении, например в лебедках. Для расширения функциональных возможностей привода используемая импульсная передача может также комбинироваться с другими типами передач, например конической или гипоидной. Везде ниже под ручным приводом будем подразумевать и ручной дублер привода.
Уровень техники. Действующие нормативы, технические условия и условия заказчика накладывают существенные экономические, технические и эргономические ограничения на высокомоментный ручной привод трубопроводной арматуры, основные из которых следующие:
1. Низкая стоимость.
Диктует простоту и технологичность конструкции, применение недорогих материалов и комплектующих;
2. Ограниченность мускульного усилия, момента и времени открытия/закрытия;
Действующий ГОСТ ограничивает диаметры штурвалов до 1 м, а также длительное усилие на штурвале до 400 Н и временное до 5 минут - 1000 Н (союзный общемашиностроительный норматив для сравнения допускал длительное усилие на маховике всего в 157 Н).
3. Большой максимальный момент (нагрузочная способность) и большой диапазон изменения момента. В зависимости от диаметра прохода и в большей степени от давления среды максимальный момент может достигать 10000-20000 Нм. При этом максимальный начальный момент при открытии/закрытии может в 20-70 раз превышать момент холостого хода, когда не действуют силы давления среды и трения в седле. Зависимость момента от угла поворота шпинделя арматуры имеет дельтаобразный вид: максимальный момент действует на 0.3-2 оборотах шпинделя задвижки, а холостой момент на 25-50 оборотах. Кроме того, существует норматив коэффициента запаса момента для запорной арматуры 1.2 и для регулирующей арматуры 1.7.
4. Большое передаточное отношение и необходимость, как минимум, двухскоростного режима передачи, регулируемость привода.
Это следует из п.2 и п.3. Например, с КПД=0.5 передача на 10000 Нм при максимально допустимом диаметре штурвала 1.0 м, максимально допустимом длительном усилии 400 Н и коэффициенте запаса 1.2 должна иметь передаточное отношение рабочего хода (10000·1.2)/(0.5·400·0,5)=120. Момент холостого хода, уменьшенный в среднем в 35 раз, только-только преодолевается на прямой передаче. (При старом нормативе на усилие в 157 Н требуется передаточное отношение почти 300). Разумеется, конкретные значения будут меняться для разных диаметров прохода и давлений среды, но общий характер соотношений остается. Не менее важно и следующее обстоятельство: одна и та же арматура заданного прохода на заданное давление устанавливается на достаточно широкий диапазон давлений, что влечет изменение максимального усилия. Приходится комплектовать привод. Настройка привода на момент диапазона хотя бы в 2-3 раза значительно снижает номенклатуру модельного ряда.
5. Высокий КПД.
Имеет в таких передачах исключительное значение, связанное не столько со снижением затрат энергии, сколько с ограниченностью мускульного усилия на штурвале привода. Например, применяемые комбинированные червячные или спироидные передачи зачастую имеют кпд около 0.4, что влечет за собой большую потерю мускульного усилия. Повышение кпд в 2 раза дает возможность пропорционально либо снизить усилие на штурвале, либо увеличить максимальный момент передачи. Для приведенного в п.4 примера увеличение кпд до 90% позволяет снизить усилие на штурвале с 400 Н до 200 Н.
6. Относительно небольшой ресурс работы привода.
В большом числе случаев число циклов открытия/закрытия за весь гарантированный 10-летний срок службы не превышает 2000-3000.
Кроме того, необходимо учитывать:
- малую скорость вращения входного вала (40-80 об/мин);
- необходимость установки указателя положения закрытия/открытия;
- надежность функционирования при отрицательных температурах (до минус 60);
- регламентацию направления вращения при открытии и закрытии;
- стандартизацию узла крепления к арматуре и узла передачи момента на ее запорный механизм;
- возможность функционирования в полно- и четвертьоборотном режимах;
- применимость для конструкций арматуры с выдвижным шпинделем.
Особенно интересен диапазон ручных приводов типа «Д» с моментом от 2000 до 15000 Нм. В этом большом сегменте рынка у нас и за рубежом практическое применение нашли в основном двухскоростные приводы на основе применения цилиндрических, конических, червячных, гипоидных, планетарных, волновых и спироидных зубчатых передач. Многие передачи имеют значительные потери ограниченного мускульного усилия по причине низкого кпд, что компенсируется чаще всего чрезмерными усилиями на штурвале.
В этих приводах в целом не удается достичь приемлемого компромисса между удобством работы и стоимостью: либо предельное мускульное усилие (например, до 2 чел.×70 кгс) и/или значительное время открытия/закрытия, либо усложнение конструкции и увеличенная стоимость. Если поставить естественную задачу снижения усилия на штурвале хотя бы до 250Н, максимальное передаточное отношение при рабочем ходе должно быть в диапазоне 10-100, а при холостом ходе в диапазоне 0.25-2.5. Видно, что передача должна быть регулируемой, причем с большим диапазоном вариации параметров. Традиционные схемы решения указанных проблем сильно усложняют конструкцию и увеличивают стоимость такого привода, что делает его практически неприемлемым для массового использования.
Так, известные приводы RU 2008136357-F16K 31/00, RU 2009121804-F16K 31/|00, RU 2005139806-F16K 31/53, GB 0316735.0-F16K 31/04, RU 2005101778-F16K 31/54, RU 2008108068-F16K 31/53 имеют либо неудовлетворительные потребительские качества по кпд, прилагаемому усилию, времени работы оператора, либо сложны и дороги.
Основная идея или единый изобретательский замысел предлагаемой связанной группы изобретений в составе способа и устройства заключается в улучшении потребительских свойств ручного привода путем применения адаптированного к трубопроводной арматуре варианта импульсной передачи с оптимизацией операции приложения мускульного усилия.
Отметим, что, несмотря на множество видов импульсных передач (см. [2]-[5]), неизвестно удачное практическое применение такой передачи для ручного привода трубопроводной арматуры, хотя по передаточному отношению и кпд они имеют определенные преимущества.
Общий основной технический результат способа и устройства - регулирование передаточного отношения путем изменения параметров движения входного вала импульсной передачи.
Графические изображения.
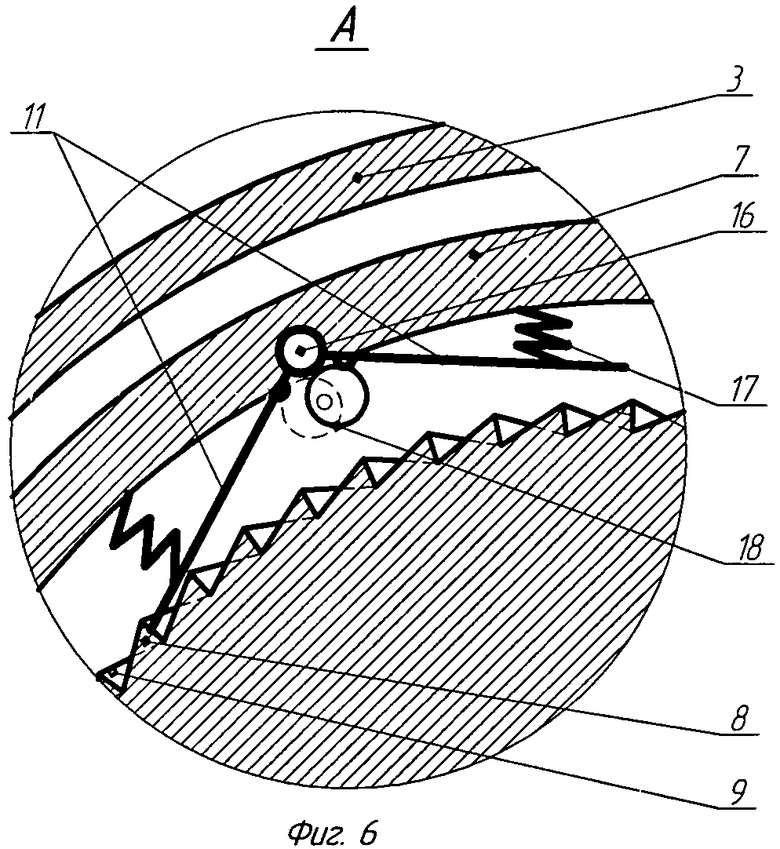
На фиг.1 и Фиг.2 представлены схемы несоосного и соосного рычажного генератора колебаний, на Фиг.3 и Фиг.4 - осевой и поперечный разрез примера импульсной передачи, на Фиг.5 и Фиг.6 - радиальный разрез передачи, иллюстрирующий многофункциональность использования элементов храпового зацепления.
Способ.
Прототипом способа является храповая передача по изобретению RU 2006119722, F16H 29/12. Как способ, прототип нацелен только на вращение входного вала, не учитывает специфики ручного усилия, не имеет режимов и регулирования и, следовательно, мало подходит для рассматриваемого приложения к трубопроводной арматуре.
Работа ручного привода арматуры основана на человекомашинном способе, при котором человек в процессе открытия/закрытия арматуры совершает:
- силовую периодическую операцию вращения входного вала;
- операции управления процессом (регулирование передаточного отношения, пуск/останов, и т.п.).
Операция вращения входного вала осуществляется приложением мускульного усилия к штурвалу или к рукоятке. Далее это вращение вала передача трансформирует во вращение ее выходного вала, который передает вращение шпинделю арматуры. Из-за указанной дельтаобразной характеристики момента шпинделя арматуры для эффективности процесса в большинстве случаев было бы достаточно иметь 2-3 различных режима передачи: режим максимального момента на выходном валу, режим уменьшенного максимального момента и режим «прямой» передачи с минимальным моментом, равным моменту на штурвале привода. Причем средний по моменту режим желательно иметь регулируемым. В рассматриваемом аналоге используется двухскоростная комбинированная передача.
Важно отметить, что из-за физиологических особенностей работы человека с большим усилием вращение входного вала фактически происходит прерывисто в виде последовательных односторонних поворотов с остановами на условно-постоянный угол с условно-постоянным усилием, а угол такого поворота связан с удобством направления прилагаемого усилия и ограничен диапазоном в 45°-80° в зависимости от диаметра штурвала.
В других высокомоментных ручных приводах, например в лебедках RU 2297484, B66D 1/00 или винтовых домкратах, вместо вращения штурвала совершается периодическая операция качания входного вала рукояткой на определенный угол. Как правило, ход в одну сторону происходит с усилием (рабочий ход), а обратно без усилия (холостой ход).
Но в том и другом случае процесс работы в целом (открытие/закрытие арматуры, подъема/опускание груза лебедкой) является результатом вращения входного вала как серии однонаправленных рабочих ходов штурвала или рукоятки, и отличаются только наличием холостых ходов рукоятки во втором случае.
Важно, что в обоих случаях:
а) совершается только однонаправленное прерывистое полнооборотное вращение входного вала передачи;
б) в течение процесса работы привода параметры рабочих ходов (усилие, угловая скорость, а также амплитуда и фаза для второго случая) условно-постоянны.
Техническая задача, решаемая в предлагаемом способе, состоит в изменении операции приложения мускульного усилия к входному валу импульсной передачи с целью улучшения потребительских свойств.
Для решения поставленной задачи предлагается способ функционирования ручного импульсного регулируемого привода, включающий последовательность операций поворота входного вала за счет приложения мускульного усилия к штурвалу или рукоятке на входном валу, операцию преобразования поворота входного вала в колебание и операцию преобразования колебания в поворот выходного вала, но в процессе работы по необходимости (при увеличении нагрузки) изменяют вид операции поворота штурвала или рукоятки и связанного с ним вала с однонаправленного поворота на колебание, а в операции колебания по необходимости изменяют амплитуду и/или фазу колебаний входного вала.
Таким образом, если в известных импульсных передачах амплитудно-фазовое регулирование осуществляют при круговом вращении входного вала над элементами внутреннего устройства передачи, то в предлагаемом варианте амплитудно-фазовое регулирование осуществляется при колебаниях входного вала и непосредственно над валом.
Использование предлагаемого способа с перечисленными выше традиционными видами зубчатых передач с равномерным вращением входного вала явно непродуктивно. Поэтому в качестве средства реализации способа предлагается применить импульсную передачу, которой присущ прерывистый характер движения звеньев.
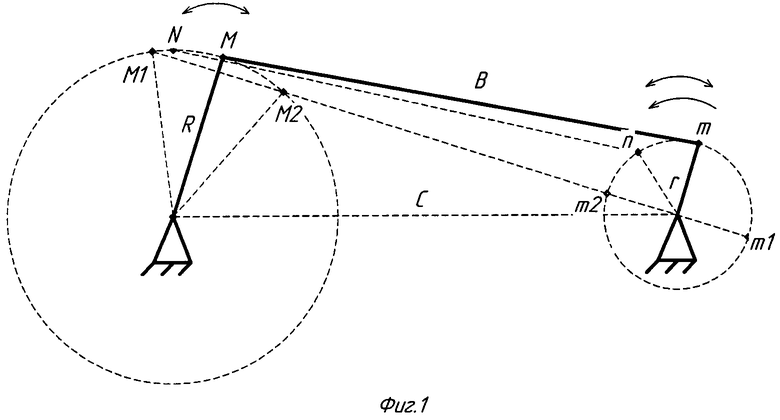
В качестве средства применения способа возьмем для примера импульсную передачу с генератором колебаний рычажного типа. В [4] на стр.7 показана простейшая импульсная передача, обобщенно состоящая из входного вращающегося вала, связанного с ним генератора колебаний (ГК), который передает колебания на ведущее звено механизма свободного хода (МСХ), выходное звено которого передает вращение выходному валу. На Фиг.1 показан ГК в виде шарнирного четырехзвенника на стойке С. При равномерном вращении входного вала с кривошипом r коромысло R, жестко связанное с внешней обоймой механизма свободного хода (МСХ), передает периодические движения ведомому валу МСХ и передачи в целом.
При этом половина оборота кривошипа не используется, т.е. имеет место холостой ход входного вала. Для рассматриваемых только больших передаточных отношений длина кривошипа r много меньше длины коромысла R, стойки С и шатуна В. Вблизи двух положений кривошипа r и шатуна В, когда они образую прямую линию (вблизи крайних положений коромысла R, или мертвых точек M1 и М2), передаточное отношение стремится к нулю, а в средней точке М между ними достигает максимума. Минимальное силовое передаточное отношение (коэффициент трансформации момента) достигается в среднем положении коромысла R, где приближенно коэффициент трансформации К≈R/r.
Регулирование импульсной передачи, как показано в [4], осуществляется многими способами и чаще всего за счет операций изменения длин рычагов r, R, В и С принудительно или автоматически (саморегулирование). Там же на стр.24 описан вариант фазового регулирования импульсной передачи с двумя планетарными рядами, однако в ней изменяется «взаимное угловое расположение» планетарных рядов, а не фаза колебаний самого входного вала.
В режиме колебания с ограниченным размахом штурвала и связанного с ним входного вала и кривошипа r параметры передачи при неизменных длинах рычагов будут зависеть от фазы колебаний и амплитуды (размаха). Видно, что при колебании кривошипа r от мертвой точки m2 до точки n коэффициент трансформации момента приближается к максимальному и может превосходить минимальное значение при колебании около средней точки m в несколько раз при одном и том же размахе (угле колебания штурвала). Изменение размаха-амплитуды и фазы дополнительно увеличивает диапазон регулирования. Изменение фазы осуществляется просто фиксацией нового положения штурвала относительно входного вала (и кривошипа r), например радиальным штифтом в шлицевой паз вала. Вариация амплитуды вообще не требует специальных узлов, так как величина размаха просто контролируется человеком.
Переход в режим вращения штурвала не менее прост: достаточно начать вращение штурвала. В этом режиме средний момент находится между максимальным и минимальным моментом.
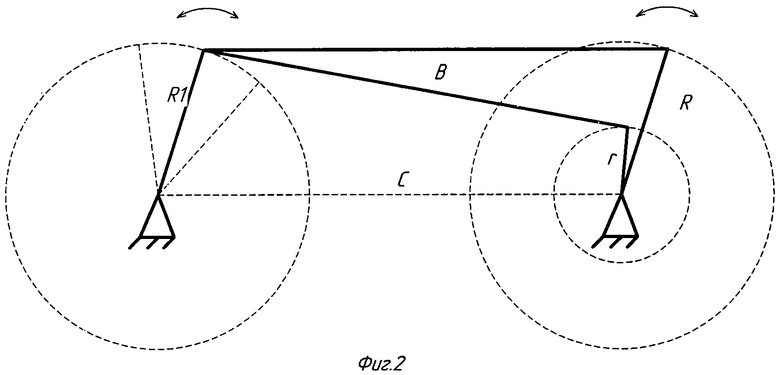
На Фиг.2 приведена эквивалентная схема генератора колебаний в виде шестизвенника, в которой входной и выходной валы могут быть коаксиальны и иметь проход для арматуры с выдвижным шпинделем. В этом варианте вращение кривошипа вначале передает колебания промежуточному шатуну R1, который передает колебания коаксиальному с кривошипом коромыслу R. При рычажном параллелограмме закон движения коромысла не меняется.
Если соединить входной вал с выходным, например кулачковой муфтой, то такая прямая передача даст скачкообразное уменьшение момента до момента на штурвале.
В итоге новый способ дает минимальный момент на прямой передаче, максимальный момент с большим передаточным отношением при колебании штурвала около мертвой точки и уменьшенный от максимального регулируемый средний момент.
Вместо шарнирного многозвенника можно использовать также роликовый кулачковый генератор импульсов, имеющий почти такой же высокий кпд. Это дает определенное преимущество перед схемой с эксцентриком-кривошипом, так как можно выбрать профиль кулачка, при котором угловое паритетное соотношение холостого и рабочего ходов можно существенно сдвинуть в пользу рабочего хода. Большой по углу рабочий ход может дополнительно увеличить диапазон регулирования передачи и снизить неравномерность. Кроме того, профилем можно задать нужную функциональную зависимость рабочего хода от угла поворота и тем самым иметь необходимые характеристики регулирования амплитуды и фазы.
Технический результат способа - регулирование передаточного отношения путем изменения режима и параметров движения входного вала импульсной передачи.
Дополнительно это увеличение диапазона передаточного отношения при повышенном кпд использования ручного усилия, упрощение регулирования конструкции.
Выбор вида импульсной передачи в большой степени связан не с предлагаемым способом, а с удовлетворением отмеченных выше предъявляемых требований к приводу арматуры, особенно в части сложности конструкции, кпд использования ручного усилия и стоимости. Оптимальным представляется применение простых однопоточных импульсных передач с рычажным эксцентриковым или кулачковым генератором импульсов и храповыми МСХ, а также комбинированной импульсной передачи с поворотной простой конической передачей. Такие схемы имеют большую нагрузочную способность, передаточное число и кпд более 90%, надежны, регулируемы, просты, технологичны и недороги.
Устройство.
Прототипом устройства является храповая передача RU 2006119722, F16H 29/12. Основным недостатком прототипа является отсутствие режимов, позволяющих моделировать дельтаобразный характер нагрузки, отсутствие регулирования параметров передачи и отсутствие реверса.
Рассмотрим конструкцию устройства ручного привода арматуры и его функционирование по предложенному способу на примере импульсной регулируемой передачи с эксцентриковым ГК и храповыми МСХ. Для импульсной передачи достаточно сложным является организация реверса, а также пропуск через передачу выдвижного шпинделя арматуры.
Техническая задача, решаемая в предлагаемом устройстве, состоит в многофункциональном использовании элементов МСХ, в частности для реверса передачи, и в реализации режимов вращения и колебания входного вала с переменными амплитудой и фазой в целях регулирования передаточного отношения.
Для решения поставленной задачи предлагается ручной импульсный регулируемый привод трубопроводной арматуры, включающий входной вал с рукояткой или штурвалом приложения мускульной силы, связанный с входным валом генератор колебаний, связанный с генератором механизм свободного хода и связанный с последним выходной вал. При этом взаимосвязь входного вала с генератором колебаний, например рычажным или кулачковым, и далее с механизмом свободного хода такова, что изменение амплитуды, фазы или амплитуды и фазы колебаний входного вала меняет передаточное отношение.
Привод содержит двойное храповое зацепление с разнонаправленными зубьями, содержит для каждого храпового зацепления в выключенном или включенном состоянии, по меньшей мере, одну силовую и по необходимости, по меньшей мере, одну дополнительную стопорную собачку, а взаимосвязь звеньев такова, что наряду с выполнением функции механизмов свободного хода звенья выполняют функцию реверса вращения выходного вала путем инвертирования состояния собачек в храповых зацеплениях, например поворотом ограничивающего эксцентрика, и, по необходимости, выполняют функцию стопора от упругой податливости или от постоянно действующей нагрузки на выходном валу.
На Фиг.3 изображен осевой разрез варианта схемы ручного импульсного регулируемого привода для иллюстрации заявленных признаков, в том числе и заявленных в функциональной форме. Привод содержит штурвал 1 со ступицей 20, установленной на полый ведомый вал 2, через который проходит шпиндель арматуры. Штифт 21 ступицы 20 штурвала 1 фиксирует положение (фазу) ступицы относительно вала. Вал 1 вращается в подшипниках, установленных в корпусе привода 3. На валу 1 имеется эксцентрик 4, который через подшипник передает колебания при повороте вала коромыслу 5. За эксцентриком на валу 1 далее установлено на подшипниках ведомое качающееся звено храпового МСХ в виде стакана 7. Коромысло 5 передает колебания звену 7 через закрепленный на стакане палец 6. По внутренней поверхности цилиндра стакана 7 установлены по две силовых собачки 10 и по две стопорные собачки 11 для каждого храповика 8 и 9. В зависимости открытия или закрытия арматуры, то есть от требуемого направления вращения штурвала (по часовой закрыть, против часовой открыть) работает только один храповик со своими собачками 10 и 11. Храповики 8 и 9 установлены на ведущем валу передачи 12, имеющем стандартный хвостовик для передачи момента механизму открытия/закрытия арматуры. Упоры зубьев храповиков 8 и 9 и соответствующие силовые 10 и стопорные собачки 11 направлены в разные стороны. Для осуществления функции прямой передачи входной вал 2 может передавать момент напрямую выходному валу 12 с помощью переключателя режима 13.
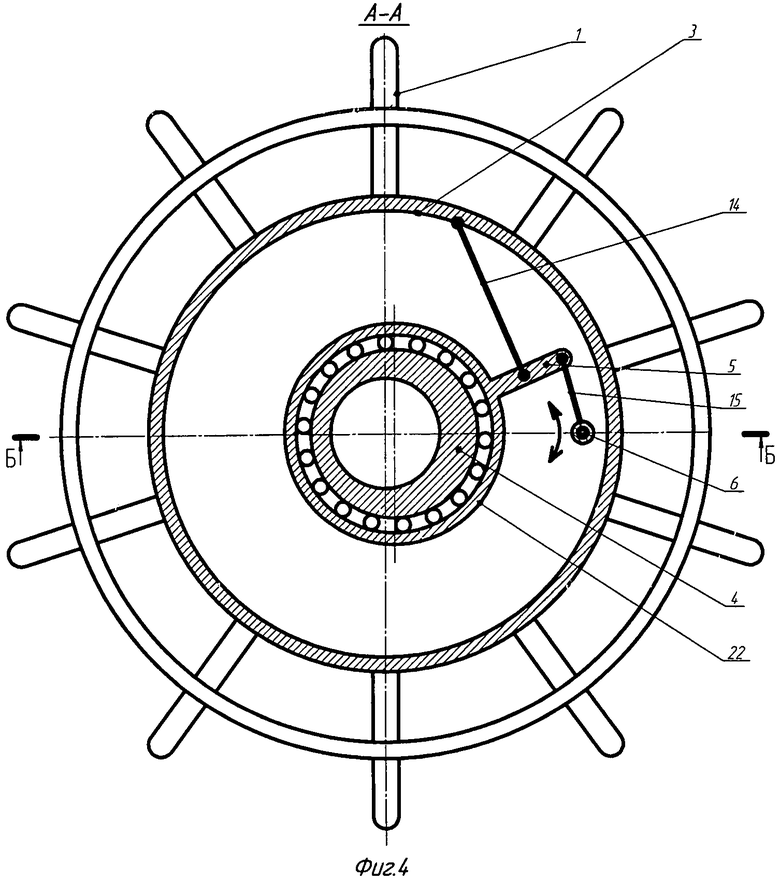
На Фиг.4. изображено радиальное сечение привода, поясняющее устройство и работу генератора колебаний с дополнительным прицепным шатуном. Коромысло 5 прицепным шатуном 14 связано с корпусом привода 3, а шатуном 15 через палец 6 связано с ведомым звеном 7 МСХ.
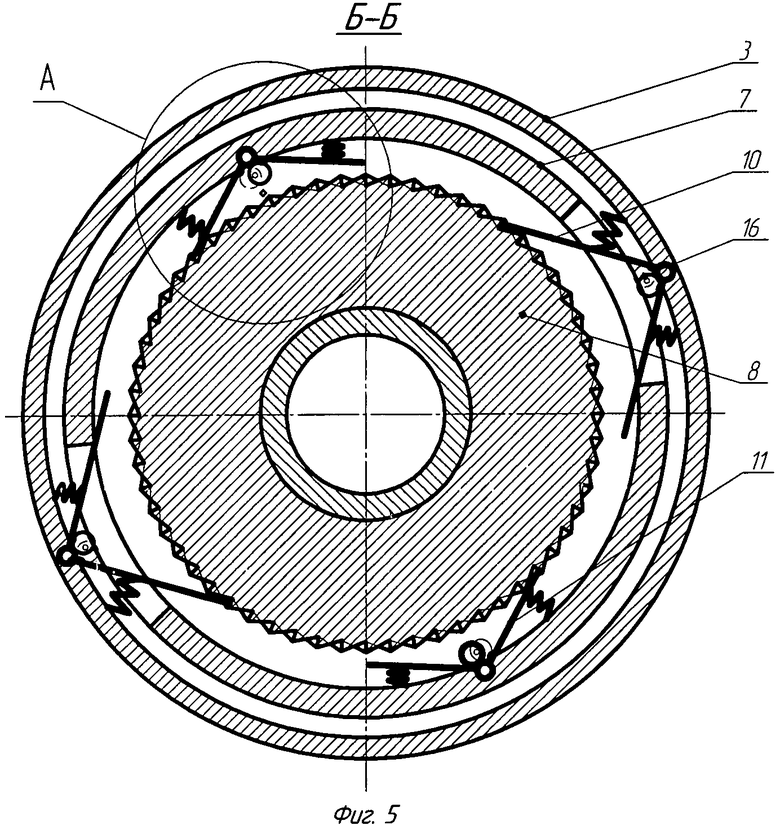
На Фиг.5 и Фиг.6 показан радиальный разрез по храповику 8, детализирующий устройство многофункционального узла. Храповые зацепления выполняют одновременно функцию МСХ, функцию реверса и, если нужно, функцию стопора при снятии нагрузки с силовой собачки. Силовые собачки закреплены на осях 16 в качающемся венце 7. Стопорные собачки закреплены на осях 16 в корпусе, и для зацепления с храповиками проходят сквозь окна в венце 7. Часть собачек находятся во включенном состоянии зацепления, а часть в выключенном состоянии зацепления со своими храповиками. Переключение состояния совершается поворотом эксцентриков 18, когда две силовые и две стопорные собачки одного храповика выводятся из зацепления, а такие же собачки другого храповика вводятся в зацепление и происходит реверс передачи. (В реальности предпочтительно производить смену состояния всех собачек одновременно одним переключателем реверса.)
Отметим новую особенность работы стопорных собачек, известных из уровня техники. Обычно они предназначены для стопора в момент начала холостого хода собачки при постоянно действующей нагрузке на выходной вал, например в случае подъема груза лебедкой. В арматуре такая нагрузка в большинстве случаев отсутствует ввиду самоторможения винтовой пары шпиндель-гайка, но в некоторых типах арматуры присутствует. Однако для храповой передачи с большим передаточным числом и большим моментом существует еще проблема стопора упругой податливости цепочки звеньев передачи и самой арматуры, так как угловая податливость становится сравнимой с угловым шагом зацепления. В противном случае при каждом колебании вала будет происходить диссипация энергии натяга звеньев и эти потери могут составить существенную величину.
Используемый функциональный термин «двойное храповое зацепление» включает в себя возможность использования цилиндрических, торцовых, конических зубьев в различных вариантах сочетаний храповиков, а также различные комбинации ведущего и ведомого звена МСХ относительно храповика и водила с собачкой. Кроме того в это понятие можно включить варианты общего крепления нескольких собачек на одном водиле, например в виде венца, причем с известным из уровня техники вариантом сдвига собачек по углу на долю зуба.
Термин «рычажный» для генератора колебаний обычно включает варианты многозвенников, в т.ч. эксцентриковый кривошип, а термин кулачковый включает сочетание кулачка с рычажным механизмом.
Возможны и другие схемы генератора колебаний, например с кулисой, с условием функционирования такого генератора при вращении и колебании входного вала и с условием регулирования передаточного отношения путем изменения амплитуды или фазы или амплитуды и фаза колебаний входного вала. Такое регулирование не исключает традиционного регулирования изменением длин рычагов, которое может применяться дополнительно.
Изображенный на фиг.3-6 вариант ручного регулируемого привода работает (например, при закрытии задвижки) следующим образом.
Вначале силовые и стопорные собачки переключателем реверса 18 устанавливают в положение, при котором поворот штурвала по часовой стрелке соответствует рабочему ходу закрытия арматуры.
Холостой ход шпинделя арматуры на прямой передаче.
Так как момент холостого хода мал, то включают прямую передачу. Переключателем-штифтом 13 соединяют напрямую входной вал 2 со штурвалом с выходным валом 12, которые после этого вращаются вместе пока запорный орган не доходит до места посадки в седло, при котором момент резко возрастает. Заметим, что включенные силовые и стопорные собачки работают вхолостую, т.к. угловая скорость колебаний венца 7 с собачками много меньше скорости вращения храповиков 8 и 9 на валу 12.
Посадка запорного органа арматуры в седло.
Увеличение усилия на штурвале указывает на необходимость включения импульсной передачи. Для этого переключателем 13 разъединяют валы и начинают вращать штурвал.
При полноповоротном вращении штурвала происходят максимальные по амплитуде колебания венца с силовыми собачками и, следовательно, максимальный ход выходного вала за один оборот штурвала с моментом, гораздо большим момента прямой передачи, но минимальным для этой передачи коэффициентом трансформации момента. При дальнейшем увеличении нагрузки и требуемого усилия просто переходят по заявленному способу в режим колебаний штурвала, например от мертвой точки до ограниченного размаха, но с увеличением выходного момента за счет изменения плеча эксцентрика. В этом режиме момент можно увеличить в 2 и более раз по сравнению с полнооборотным вращением штурвала. В отличие от саморегулирования при возрастании нагрузки, например в инерционных трансформаторах момента, в которых входной момент считается постоянным, в данном случае происходит подобие саморегулирования приложенным усилием (входным моментом), где управляющим элементом является человек.
Имеется возможность совместно с регулированием амплитуды колебаний штурвала изменять и фазу колебаний, что расширяет диапазон регулирования передаточных параметров привода. Для этого штифтом 21 сдвигают и фиксируют штурвал на некоторый угол (фазу) относительно входного вала. В этом режиме момент может быть при повороте (в пределе на один храповой шаг) максимально увеличен в несколько раз, но при этом возрастает передаточное отношение.
Работа передачи при открытии арматуры аналогична. Для реверса нужно перебросить собачки и вращать штурвал или производить рабочий ход при колебании штурвала против часовой стрелки.
Таким образом, для арматуры с двухуровневым дельтаобразным характером момента выбор храповой импульсной передачи с возможностью гораздо большего передаточного отношения с большим кпд, прямого хода, реверса и с совмещением функций конструктивных элементов является более приемлемым к предъявляемой совокупности требований.
Технический результат - регулирование передаточного отношения путем изменения режима и параметров движения входного вала импульсной передачи.
Дополнительно это увеличение диапазона передаточного отношения при повышенном кпд использования ручного усилия, упрощение регулируемой конструкции, возможность работы в «сухом» варианте без смазки.
Работа в режиме колебаний штурвала может осложниться большим моментом инерции последнего. В этом случае целесообразно на входном валу вместе со штурвалом иметь дополнительную рукоятку для режима колебаний с радиусом, не обязательно совпадающим с радиусом штурвала. Рукоятка должна иметь свободный ход относительно штурвала в пределах 90-120 градусов. В этом случае имеется дополнительная возможность выбора оптимального усилия на режимах вращения и колебания.
Зависимые пункты независимого пункта формулы.
- Для работы на прямом ходу, как отмечалось выше, передача содержит устройство включения/выключения прямого хода импульсной передачи.
- При непосредственном использовании предлагаемой передачи для арматуры с вертикальным шпинделем штурвал будет вращаться в горизонтальной плоскости, что не всегда удобно. Во-вторых, даже при достаточно высоком моменте рабочего хода может возникнуть случай, когда в режиме прямой передачи момент будет недостаточен для холостого хода. В этих случаях возможны варианты комбинации привода с другими передачами, преимущественно с передачами с большим кпд. Интересна поворотная, например коническая пара, так как позволяет в импульсном приводе исключить полый вал и позволяет использовать несоосную схему входного и выходного вала, что значительно упрощает конструкцию.
- Для облегчения условий труда в условиях отсутствия электрификации, целесообразно практически без дополнительных капитальных затрат использовать для открытия/закрытия арматуры переносной подключаемый двигатель, например гайковерт с питанием от аккумулятора или переносного генератора (или пневматический или гидравлический). Для этого на входном валу достаточно иметь унифицированный хвостовик для присоединения инструмента.
Любые сочетания этих зависимых пунктов с независимым пунктом дают возможность производства широкого модельного ряда, но на базе единой конструкторско-технологической концепции. Предложенный привод может быть использован в ручной лебедке, с простым регулированием усилия на выходе в достаточно широком диапазоне.
БИБЛИОГРАФИЯ
1. Д.Ф.Гуревич, О.Н.Шпаков «Справочник конструктора трубопроводной арматуры», Ленинград, Машиностроение, 1987 г.
2. Г.Ю.Волков, Л.Н.Тютрина «Обобщенные структуры циклового и импульсного биоприводов транспортных средств». Сборник кратких научных сообщений Всероссийской научно-технической конференции «Механика и процессы управления моторно-трансмиссионных систем транспортных машин». Курган, изд. Курганского гос. университета, 2003 г.
3. В.Ф.Мальцев «Механические импульсные передачи». - М.: Машиностроение, 1978 г.
4. А.И.Леонов и др. «Механические бесступенчатые нефрикционные передачи непрерывного действия». - М.: машиностроение, 1984 г
5. А.А.Благонравов «Механические бесступенчатые передачи», Екатеринбург, УроРАН, 2004 г
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД КЛАПАНА КРАНОВОГО ТИПА И РУЧНОЙ ДУБЛЕР ПРИВОДА | 2000 |
|
RU2179681C2 |
| Электропривод трубопроводной арматуры с ручным дублером | 2024 |
|
RU2829243C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ШАРОВЫХ КРАНОВ И РУЧНОЙ ДУБЛЕР | 2001 |
|
RU2213890C2 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| ИМПУЛЬСНЫЙ ПРИВОД | 2006 |
|
RU2328640C2 |
| РУЧНОЙ ПРИВОД ДЛЯ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2013 |
|
RU2527225C1 |
| Импульсная изменяемая передача вращения | 2016 |
|
RU2629765C2 |
| АРМАТУРА ТРУБОПРОВОДА С ПНЕВМАТИЧЕСКИМ РОТАЦИОННЫМ ПРИВОДОМ | 1999 |
|
RU2155289C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1995 |
|
RU2087781C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
Группа изобретений относится к области машиностроения и предназначена для использования предпочтительно в качестве ручного привода или в качестве ручного дублера привода запорной и регулирующей трубопроводной арматуры со средними и большими значениями момента закрытия/открытия. Способ функционирования ручного импульсного регулируемого привода включает последовательность операций поворота входного вала за счет приложения мускульного усилия к штурвалу или рукоятке на входном валу, операцию преобразования поворота входного вала в колебание входного звена МСХ и операцию преобразования колебания этого звена в однонаправленный поворот выходного вала. Наряду с обычной операцией однонаправленного поворота входного вала применяют операцию поворота в виде колебаний входного вала. Для регулирования привода изменяют амплитуду, фазу или амплитуду и фазу колебаний самого входного вала с маховиком или рукояткой. Описан ручной импульсный регулируемый привод трубопроводной арматуры. Технический результат - регулирование передаточного отношения путем изменения параметров движения входного вала импульсной передачи. 2 н. и 4 з.п. ф-лы, 6 ил.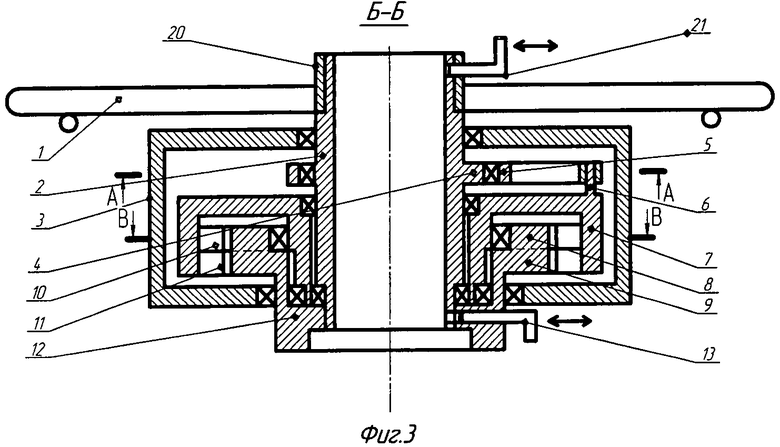
1. Способ функционирования ручного импульсного регулируемого привода, включающий последовательность операций поворота входного вала за счет приложения мускульного усилия к штурвалу или рукоятке на входном валу, операцию преобразования поворота входного вала в колебание входного звена МСХ и операцию преобразования колебания этого звена в однонаправленный поворот выходного вала, отличающийся тем, что наряду с обычной операцией однонаправленного поворота входного вала применяют операцию поворота в виде колебаний входного вала, а для регулирования привода изменяют амплитуду, фазу или амплитуду и фазу колебаний самого входного вала с маховиком или рукояткой.
2. Способ по п.1, отличающийся тем, что в операции однонаправленного поворота входного вала используют прямую передачу, для чего непосредственно соединяют входной и выходной валы.
3. Ручной импульсный регулируемый привод трубопроводной арматуры, включающий входной вал, генератор колебаний, механизм свободного хода и выходной вал, отличающийся тем, что входной вал приводят в колебательное движение маховиком или рукояткой, а ручное изменение амплитудно-фазовых параметров колебания входного вала позволяет регулировать передаточное отношение.
4. Привод по п.3, отличающийся тем, что содержит устройство включения/выключения прямой передачи путем непосредственного соединения ее входного и выходного вала, например штифтом.
5. Привод по пп.3 и 4, отличающийся тем, что импульсный привод комбинируют с дополнительной передачей, например с поворотной конической парой.
6. Привод по пп.3 и 4, отличающийся тем, что привод комбинируют с постоянно установленным двигателем, например электродвигателем, или комбинируют временно для работы с подключаемым внешним источником движения, например пневматическим гайковертом.
| ХРАПОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2321787C1 |
| РУЧНОЙ ДВУХСКОРОСТНОЙ ПРИВОД ДЛЯ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2008 |
|
RU2378555C2 |
| РЕДУКТОР ХРАПОВОЙ РЕВЕРСИВНЫЙ | 2003 |
|
RU2253780C1 |
| Шахтный депримометр | 1986 |
|
SU1362973A2 |

