Изобретение относится к области авиационной техники и может быть использовано в конструкции беспилотных вертолетов-самолетов и двухфюзеляжных вертолетов-самолетов с поворотными винтами, применяющих технологии вертикального взлета и посадки, короткого взлета и посадки или короткого взлета и вертикальной посадки для наземного, корабельного и аэродромного или палубного базирования.
Известен беспилотный конвертоплан мод. "Eagle Eye" (США), представляющий собой моноплан со среднерасположенным крылом обратной стреловидности и на концах его консолей смонтированы редукторы с тянущими винтами, установленными в поворотных гондолах, при повороте которых он преобразовывается в вертолет двухвинтовой поперечной схемы, имеющий в центре фюзеляжа двигатель и главный редуктор с синхронизирующим валом, проложенным внутри крыла и обеспечивающим равномерное распределение мощности между поворотными винтами, двухкилевое оперение и убирающееся в носовой и кормовой отсеки фюзеляжа шасси велосипедной схемы со вспомогательными колесами на концах поворотных гондол.
Признаки, совпадающие - наличие поворотных гондол с тянущими винтами, создающими горизонтальную и соответствующим отклонением вертикальную тягу, диапазон поворота винтов от 0° до +97,5°, систему трансмиссии с синхронизирующим валом, проложенным внутри крыла и обеспечивающим равномерное распределение мощности силовой установки между поворотными винтами, шасси велосипедной схемы со вспомогательными колесами на концах поворотных гондол.
Причины, препятствующие поставленной задаче: первая - это то, что консольное размещение на концах крыла поворотных гондол с редукторами и винтами предопределяет конструктивно сложное прямое крыло, оснащенное сложной системой поворота винтов и механизации крыла, что усложняет конструкцию и уменьшает надежность. Вторая - это то, что диаметры двух винтов ограничены размахом консолей крыла и, как следствие, при висении поток от винтов, обдувая консоли крыла и создавая значительную общую потерю (почти 23%) в вертикальной их тяге, затормаживается, и большие скорости потока, отбрасываемого от них, предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что силовая установка включает один газотурбинный двигатель и тем самым снижает надежность крейсерского полета при его отказе. Четвертая - это то, что горизонтальная тяга винтов обеспечивается только в крейсерском полете, поэтому после его выполнения и при возможном отказе узлов поворота гондол взлетать и садиться «по-самолетному», как обычный самолет, этот беспилотный конвертоплан не может, так как радиус его поворотных винтов гораздо больше высоты установки гондол на концах крыла, и тем более шасси велосипедной схемы имеет вспомогательные колеса на концах гондол, которые могут использоваться только при выполнении вертикального взлета и посадки (ВВП), что также исключает возможность выполнения короткого взлета и посадки (КВП). Все это ограничивает возможность как уменьшения массы конструкции планера, так и дальнейшего увеличения взлетного веса и весовой отдачи при повышении тяговооруженности, а также улучшения показателей наработки на отказ и безотказности.
Известен беспилотный самолет вертикального взлета и посадки мод. "Panther" (Израиль), содержащий моноплан двухбалочной схемы с высокорасположенным прямым свободнонесущим крылом, двухкилевое П-образное хвостовое оперение, смонтированное на разнесенных балках к консолям крыла и снабженное прямым стабилизатором, короткий фюзеляж, силовую установку, включающую два передних поворотных и один задний стационарный электромоторы с тянущими винтами, смонтированные соответственно в передних окончаниях разнесенных балок и на конце короткого фюзеляжа, трехстоечное колесное шасси, неубирающееся с передней опорой.
Признаки, совпадающие - наличие моноплана двухбалочной схемы с трехколесным шасси и передней опорой. Разнесенные балки соединяют крыло с двухкилевым П-образным оперением, которое снабжено стабилизатором. Системой управляют три электромотора с тянущими винтами, два передних из которых поворотные. Беспилотный самолет вертикального взлета и посадки (БСВВП) "Panther" может подниматься на высоту порядка 3 км, находиться в воздухе до 6 часов и действовать в радиусе до 60 км от оператора при длительных полетах днем и ночью для телевизионного или инфракрасного наблюдения местности и целей на ней в реальном масштабе времени. БСВВП является тактическим разведывательным летающим аппаратом поля боя, сочетающим в себе преимущества и вертолета, и самолета. БСВВП располагает поворотными электромоторами с тянущими винтами и, как вертолет, способен по командно-телеметрической радиолинии совершать вертикальный взлет, посадку и зависание.
Причины, препятствующие поставленной задаче: первая - это то, что БСВВП трехвинтовой несущей схемы с задним винтом на конце короткого фюзеляжа, используемым только на вертолетных режимах полета, имеет повышенное аэродинамическое сопротивление на самолетных режимах полета, сложную схему управления электромоторами при независимом вращении трех винтов на вертолетных режимах полета, малую весовую отдачу и радиус действия. Вторая - это то, что при висении поток от двух передних и одного заднего тянущих винтов, обдувая соответственно крыло от его носка и кормовую часть фюзеляжа, создает значительную общую потерю (порядка 14%) в вертикальной их тяге, затормаживается, и большие скорости потока, отбрасываемого от них, предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что расположение в передних окончаниях разнесенных балок поворотных электромоторов с тянущими винтами предопределяет конструктивно сложное прямое крыло, оснащенное мощными системами их поворота и механизации крыла, что усложняет конструкцию и уменьшает надежность. Четвертая - это то, что диапазон высот применения БСВВП - 100…3500 м при взлетном его весе 65 кг.
Наиболее близким к предлагаемому изобретению является дистанционно пилотируемый вертолет-самолет (Россия) [1], представляющий собой высокорасположенный моноплан с передним горизонтальным оперением, содержащий двухкилевое оперение, смонтированное к консолям крыла на гондолах, газотурбинный двигатель силовой установки, передающий мощность через соединительные и синхронизирующий валы на поворотные тянущий и толкающий винты, расположенные соответственно в носовой и задней части короткого фюзеляжа, обеспечивающие горизонтальную и соответствующим отклонением вертикальную тягу, трехстоечное неубирающееся колесное шасси, с носовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие - наличие двух несущих плоскостей аэродинамической схемы «утка»: переднее горизонтальное оперение (ПГО) и трапециевидное крыло, снабженное гондолами с разнесенным двухкилевым оперением и с переменной стреловидностью наплывами, объединяющими в единую конструкцию крыло и фюзеляж, представляющий собой в плоскости симметрии S-образный профиль. Поворотные тянущий и толкающий винты, оснащенные по оси симметрии синхронизирующим валом, расположены соответственно в передней и задней части короткого фюзеляжа и обеспечивают горизонтальную тягу и соответствующим отклонением вверх и вниз от горизонтального положения вертикальную на угол 90° или наклонную тягу на угол 65° соответственно при вертикальном или коротком взлете и посадке.
Причины, препятствующие поставленной задаче: первая - это то, что диаметры носового и хвостового поворотных винтов ограничены высотою стоек, особенно, главного шасси и, как следствие, это ограничивает вертикальную тяговооруженность, а его однодвигательная силовая установка, снижая надежность крейсерского полета при его отказе, ограничивает взлетный вес и с целью его увеличения предопределяет при взлете-посадке «по-самолетному» возможность только короткого взлета и посадки с отклоненными винтами на угол 65°. Вторая - это то, что при переходных режимах полета продольная его устойчивость обеспечивается парой несущих плоскостей ПГО-крылом и ограничивается возможностью продольной управляемости при этом только самим ПГО, что усложняет стабильность продольного управления, особенно, при уменьшении скорости полета и одновременном увеличении угла атаки ПГО. Третья - это то, что при висении продольное расположение поворотных винтов изменяемого шага и с управлением циклического их шага значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автоматов их перекоса, создающие неблагоприятные условия для работы других механизмов и оборудования, весьма снижают разрешающую способность аэрофотосъемочной аппаратуры. Все это ограничивает увеличение продольной стабильности и управляемости, но и повышение наработки на отказ и безотказности. Кроме того, размещение силовой установки в центральной части фюзеляжа, а в носовой и задней его частях редукторов винтов с механизмами их поворота, что значительно уменьшает полезный объем фюзеляжа.
Предлагаемым изобретением решается задача в указанном выше известном дистанционно пилотируемом вертолете-самолете удвоения взлетного веса и значительного повышения весовой отдачи, исключения вредной обдувки выхлопными газами газотурбинного двигателя заднего поворотного винта и улучшения при коротком взлете и посадке взлетно-посадочных характеристик, путевой устойчивости и устойчивости по крену, повышения продольной стабильности и упрощения поперечной управляемости при переходных маневрах, вертикальном взлете, посадке и висении.
Отличительными признаками предлагаемого изобретения от указанного выше известного дистанционно пилотируемого вертолета-самолета, наиболее близкого к нему, являются наличие того, что он выполнен по конструктивно-силовой двухфюзеляжной схеме и концепции тандемного расположения разновеликих поворотных винтов по схеме 1+2 таким образом, что передний больший винт и два задних меньших винта, расположенные вдоль соответственно плоскости симметрии и продольной оси соответствующего фюзеляжа и размещенные соответственно в направлении полета спереди и сзади от центра масс, имеют на вертолетных режимах полета равновеликие расстояния от вертикальных их осей до центра масс, но и снабжен возможностью преобразования его полетной конфигурации как с вертолета трехвинтовой несущей схемы, включающей один передний и два задних винта, имеющих при этом плоскости вращения их лопастей соответственно над и под средней линией крыла, но и противоположное направление вращения между передним и задними винтами при одинаковом направлении вращения задних винтов между собой, в двухфюзеляжный трехвинтовой самолет продольной схемы триплана, так и обратно; диаметры переднего и задних винтов определяются из соотношения: D=d×√2, м (где: D и d - диаметры переднего большего и задних меньших поворотных винтов соответственно), при этом плоскость вращения лопастей переднего большего винта, создающего вертикальную тягу и расположенного над межфюзеляжным пространством, ограниченным в плане внутренними бортами фюзеляжей, задней и передней кромками, имеющими соответственно прямую и обратную стреловидности, образованные относительно оси симметрии на соответствующих межфюзеляжных частях переднего горизонтального оперения и крыла, размещена с возможностью его вращения без обдува как первых и вторых межфюзеляжных плоскостей, так и фюзеляжей, межфюзеляжные части переднего горизонтального оперения и крыла, выполненные соответственно с отрицательным и положительным углами поперечного V, позволяющими уменьшить высоту стоек шасси и увеличить высоту расположения излома межфюзеляжной части крыла, оснащены по оси симметрии соответственно передней гондолой, снабженной снизу створками, закрывающими нишу убирания носовой стойки шасси, и на изломе крыла центральной гондолой с передним большим винтом, вынесенным за точку сопряжения передней кромки межфюзеляжной части крыла, и сзади от носка последней двумя мотогондолами, снабженными двигателями, выполненными с передним выводом вала для отбора взлетной их мощности и связанными с главным редуктором, система трансмиссии, включающаяся наряду с кормовыми редукторами двух задних меньших винтов, оснащена центральным Т-образным в плане главным редуктором, обеспечивающим неравномерное распределение взлетной мощности (Nв) силовой установки между передним и задними винтами и снабженным в направлении полета передним и боковыми левым и правым выходными валами, а также для присоединения двигателей двумя задними входными валами, расположенными по обе стороны от оси симметрии, передний выходной вал главного редуктора, снабженный соответствующим соединительным валом, проходящим в центральной гондоле, связан с передним редуктором большего винта, а боковые левый и правый выходные валы снабжены соответствующими поперечно-продольными Г-образными в плане соединительными валами, проходящими в межфюзеляжной части крыла и соответствующей кормовой части каждого фюзеляжа, обеспечивают перегибы в плане от главного редуктора к соответствующим кормовым редукторам задних меньших винтов, система управления снабжена стабилизирующей системой со специальным интегрирующим устройством, автоматически изменяющим отклонение аэродинамических рулей управления по тангажу и крену и обеспечивающим управление общим шагом всех винтов в зависимости от угла поворота переднего большего винта и стабилизацию по угловой скорости тангажа и крена, а также демпфирования рыскания и изменений высоты полета.
Кроме того, с целью повышения при вертикальном взлете, посадке и висении эффективности управления по рысканью и путевой стабилизации главный редуктор обеспечивает возможность передачи взлетной мощности силовой установки на передний и задние винты соответственно меньшую и большую ее части, первая из которых определяется из соотношения:  кВт (где Nв и Nпер - взлетная мощность силовой установки и мощность, передаваемая на передний больший винт, соответственно), а последняя - из соотношения: Nзад=Nпер×√2, кВт (где: Nзад и Nпер - мощности, передаваемые на задние и передний поворотные винты, соответственно).
кВт (где Nв и Nпер - взлетная мощность силовой установки и мощность, передаваемая на передний больший винт, соответственно), а последняя - из соотношения: Nзад=Nпер×√2, кВт (где: Nзад и Nпер - мощности, передаваемые на задние и передний поворотные винты, соответственно).
Кроме того, с целью исключения близкого расположения задних винтов к поверхности земли на режимах вертикального взлета и посадки плоскости вращения лопастей переднего большего и задних меньших винтов, осуществляющих тягу по тянущей схеме, расположены соответственно над центральной гондолой и тонкими плавно образованными кормовыми частями фюзеляжей, при этом задние меньшие винты в каждом конечном положении их поворота при создании ими вертикальной или горизонтальной тяги снабжены возможностью осуществлять тягу соответственно по тянущей или толкающей схеме, а на переходных режимах полета обеспечивать синхронный ускоренный поворот задних винтов вниз или обратно вверх при нулевом угле установки их лопастей после или до установки переднего большего винта соответственно для создания им горизонтальной или вертикальной тяги.
Благодаря наличию этих признаков, которые позволят выполнить беспилотный вертолет-самолет по конструктивно-силовой двухфюзеляжной схеме и концепции тандемного расположения разновеликих поворотных винтов по схеме 1+2. Это обеспечит возможность преобразования его полетной конфигурации с вертолета трехвинтовой несущей схемы, включающей один передний и два задних поворотных винта, отклоненных соответственно вверх и вниз и расположенных перед и за центром масс, в двухфюзеляжный самолет продольной схемы триплана, имеющий трехвинтовую тандемную движительную систему, но и обратно. Беспилотный двухфюзеляжный вертолет-самолет позволяет быстро и сравнительно дешево удвоить вертикальную грузоподъемность, обеспечить удобную погрузку-выгрузку и сэкономить место на стоянке, что весьма важно при аэродромном и палубном его базировании. Кроме того, в двух фюзеляжах с увеличенным полезным объемом размещается разведывательное и регистрирующее оборудование, а также полезная нагрузка, причем на каждом из них, соединенных межфюзеляжными частями ПГО и крыла, устанавливается половина хвостового оперения с разнесенным цельноповоротным стабилизатором и шасси, что позволит, уменьшая массу и габариты планера, значительно увеличить вес топлива и весьма повысить дальность его полета. Межфюзеляжные части ПГО и крыла оснащены по оси симметрии соответственно передней гондолой, снабженной снизу нишей для носовой стойки убирающегося шасси и центральной гондолой, вынесенной за переднюю кромку межфюзеляжной части крыла и снабженной спереди большим поворотным винтом и сзади от носка крыла двумя мотогондолами, расположенными по обе стороны от оси симметрии и снабженными двигателями, имеющими передний вывод вала для отбора взлетной их мощности. Наличие этих признаков позволит при переходных маневрах повысить как путевую и устойчивость по крену, так и продольную стабильность и поперечную управляемость, а размещение силовой установки на межфюзеляжной части крыла обеспечит как упрощение системы трансмиссии, так и исключение вредной обдувки выхлопными газами газотурбинных двигателей задних толкающих поворотных винтов. Это позволит также повысить безопасность полетов и использовать газотурбинные двигатели меньших габаритов в их поперечнике, что обеспечит уменьшение как миделя каждой мотогондолы, так и ширину передней центральной гондолы и предопределит меньшее затенение переднего тянущего поворотного винта при вертикальном взлете, посадке и висении. Кроме того, при висении, максимально отклоняя вниз закрылки крыла, это позволит уменьшить на 7% потери вертикальной тяги и задних поворотных винтов. В крейсерском полете, используя один из двух двигателей, это позволит, чередуя их работу, увеличить наработку на отказ двигателей и повысить безотказность и безопасность полетов.
Предлагаемое изобретение высокоскоростного беспилотного двухфюзеляжного вертолета-самолета (БДВС) и варианты его использования представлены на фиг.1-2.
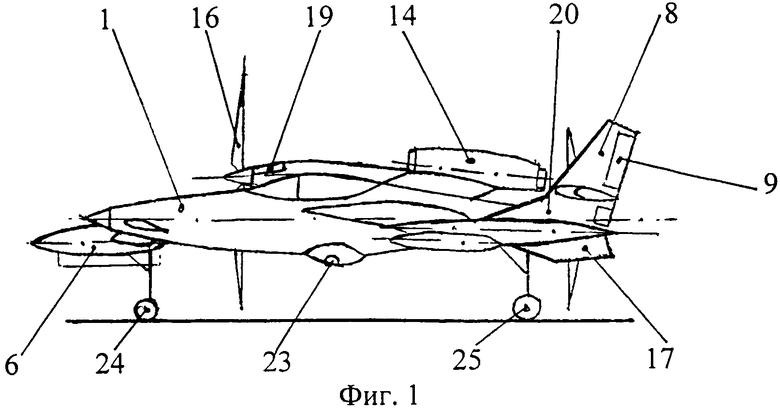
На фиг.1 изображен высокоскоростной БДВС в полетной конфигурации самолета общий вид сбоку с тандемным расположением поворотных винтов переднего и задних в трехвинтовой движительной системе на крейсерских режимах его полета.
На фиг.2 изображен высокоскоростной БДВС в вертолетоподобной полетной конфигурации общий вид сверху с расположением поворотных винтов в трехвинтовой несущей схеме на режимах его вертикального взлета, посадки и висения.
Высокоскоростной беспилотный двухфюзеляжный вертолет-самолет, выполненный по интегральной компоновке продольного триплана и представленный на фиг.1 и 2, содержит два фюзеляжа 1, имеющие удобообтекаемую S-образную форму в продольной плоскости. Высокорасположенное крыло 2, имеющее впереди его наплывы 3 с переменной стреловидностью, плавно переходящими в межфюзеляжную часть 4 крыла 2, объединяющую фюзеляжи 1 и крыло 2 в единую плавно образованную конструкцию (см. фиг.2). Перед наплывами 3 смонтировано переднее горизонтальное оперение (ПГО) 5, имеющее по оси симметрии на межфюзеляжной части ПГО 5 переднюю гондолу 6, снабженную снизу створками, закрывающими нишу убирания носовой стойки шасси. Гондолы 7 соединяют крыло 2 с двухкилевым оперением 8, имеющим рули направления 9. Трапециевидное крыло 2, оснащенное закрылками 10 по всему размаху, выполнено от оси симметрии с положительным +3° углом поперечного V, увеличивающего высоту излома межфюзеляжной части 4 крыла 2 в 1,06 раза, и снабжено концевыми частями 11, имеющими на их законцовках гасящие вибрации грузы 12 - контейнеры систем радиоэлектронной борьбы (РЭБ). Цельноповоротный стабилизатор (ЦПС) 13 имеет возможность синфазного и дифференциального отклонения его консолей, смонтированные по внешним боковым поверхностям двухкилевого оперения 8. При этом консоли ЦПС 13 и концевые части 11 крыла 2 выполнены отклоняющимися вверх для удобства размещения на палубе (ангаре) и возможности эксплуатации на кораблях. Силовая установка (СУ), расположенная по оси симметрии, смонтирована на межфюзеляжной части 4 крыла 2 в мотогондолах 14 с газотурбинными двигателями (ГТД), установленными с максимальной их простотой обслуживания и эксплуатации. Мощность от ГТД передается поворотным винтам, посредством системы трансмиссии, связанной с передним и кормовыми редукторами, расположенными спереди в центральной гондоле 15 и сзади в фюзеляжах 1. Выходной вал первого снабжен возможностью его поворота с передним большим винтом 16 относительно оси редуктора вверх от горизонтального положения вдоль плоскости симметрии, а выходные валы вторых редукторов с задними меньшими винтами 17 - вниз синхронно первому (см. фиг.1). При этом реверсивные винты 16 и 17, выполненные с жестким креплением угле- и стеклопластиковых лопастей и возможностью изменения углов их установки, смонтированы в переднем и кормовых обтекателях 18, имеющих соответственно сверху от начала и снизу от конца раскрываемые продольные проемы 19, снабженные направляющими для поворота корпуса поворотного вала с винтом соответствующего редуктора. Поворот четырехлопастных винтов 16 и 17, преобразующих его полетную конфигурацию с вертолета трехвинтовой несущей схемы в трехвинтовой двухфюзеляжный самолет продольной схемы триплана, осуществляется с помощью электромеханических приводов. Система трансмиссии, включающаяся наряду с кормовыми редукторами двух задних винтов, оснащена центральным Т-образным в плане главным редуктором, передающим меньшую и большую части располагаемой взлетной мощности (Nв) силовой установки соответственно на передний и задние поворотные винты, и снабженным в направлении полета передним и боковыми левым и правым выходными валами, а также и двумя задними входными валами, расположенными по обе стороны от оси симметрии. Избыточная тяговооруженность СУ, обеспечивающая вертикальный взлет, посадку и висение, предопределяет в крейсерском полете муфтами сцепления отключение любого избыточного ГТД или одного из них при отказе (на фиг.1…2 не показаны). В случае отказа двух двигателей СУ, то возможна автоматическая посадка в конфигурации вертолета на режиме авторотации его несущих винтов 16 и 17. Каждая гондола 7 сверху и под ее концом оснащена соответственно форкилем 20, имеющим до носка крыла 2 аэродинамический гребень, и нижним килем 21, повышая путевую и устойчивость по крену, отклоненным наружу. Трапециевидной формы и нижние кили 21, и вертикальные оперения 8, но и консоли ЦПС 13 снабжены, исключая гасящие вибрации грузы, скошенными соответственно назад, но и вовнутрь законцовками. На гондолах 7, продленных от носка крыла 2 и за заднюю его кромку, смонтировано двухкилевое оперение 8 с нижними килями 21, закрывая полностью по бокам задние винты 17, уменьшают опасность для обслуживающего персонала. В передних окончаниях каждой гондолы 7, имеющей в нижней части отсек для опоры главного шасси, смонтированы две ТВ камеры 22 переднего видового обзора. Для размещения целевой нагрузки - оптико-электронной, радиотехнической и разведывательной аппаратуры (для видовой разведки, телевизионного и инфракрасного наблюдения местности в реальном масштабе времени), а также широкополосного передатчика с антенной для передачи изображения по телевизионному радиоканалу предусмотрены в фюзеляжах 1 отсеки 23. Причем в состав данного оборудования могут входить автоматический радиопеленгатор, автопилот и системы РЭБ с пассивными и активными средствами. Дальность связи может составлять: по радиоканалу закрытой связи и прямой радиовидимости на удалении от базовой автоматизированной станции до 540 км при высоте его полета не ниже 12500 м, а по спутниковому или мобильному каналу в зоне их действия. Трехопорное убирающееся шасси, носовая опора с колесом 24 убирается в нишу передней гондолы 6, главные боковые опоры с колесами 25 - в отсеки разнесенных гондол 7.
Управление высокоскоростным БДВС обеспечивается общим и дифференциальным изменением шага поворотных винтов переднего 16 и задних 17 и отклонением рулевых поверхностей 9 и 13, работающих в зоне активного обдува этих винтов. При крейсерском полете подъемная сила создается крылом 2 и ПГО 5, горизонтальная тяга - винтами 16 и 17, на режиме висения только винтами 16 и 17, на режиме перехода - крылом 2, ПГО 5 и винтами 16 и 17. При переходе к вертикальному взлету-посадке (висению) раскрываются проемы 19 и затем закрылки 10 крыла 2 отклоняются на максимальные их углы синхронно с поворотов винтов 16 и 17 вдоль и параллельно оси симметрии от горизонтального положения, отклоняясь соответственно вверх и вниз, устанавливаются вертикально (см. фиг.2). При переходе с самолетного режима полета на режим висения и если возникает момент тангажа (Mz), то он парируется отклонением консолей ЦПС 13, создающих, работая в зоне вихрей от обдува наплывов 3, парирующую силу. После установки поворотных винтов переднего 16 и задних 17 в вертикальное положение вдоль линий вертикальной их тяги осуществляется возможность вертолетных режимов полета. С приближением к поверхности земли (палубы корабля) и полете вблизи них несущие винты 16 и 17, имея взаимно противоположное их вращение, образуют под БДВС область уплотненного воздуха, создающего эффект воздушной подушки, повышающей их эффективность. Поворотные реверсивные винты 16 и 17 отклоняются от горизонтального положения вверх и вниз на угол 90° и 65° соответственно при вертикальном взлете (посадке) и взлете с коротким разбегом (посадке с коротким пробегом) БДВС на вертолетных и самолетных режимах его полета. Для соответствующей посадки БДВС на поверхность земли (палубы корабля) используются колеса 24 и 25 убирающегося трехопорного шасси.
При висении на вертолетных режимах полета продольное управление БДВС осуществляется как у вертолета продольной схемы изменением шага винтов переднего 16 и задних 17, путевое управление - изменением крутящих моментов этих винтов. Поперечное управление обеспечивается изменением шага левого и правого задних винтов 17, осуществляющих поперечную балансировку при одновременном соответствующем изменении шага переднего винта, обеспечивающего при этом продольную стабилизацию в связи с изменяемой продольной балансировкой. Отсутствие при висении перекрытия переднего 16 и задних 17 винтов также значительно снижает вредное взаимовлияние и повышает их заполнение, что, в свою очередь, значительно уменьшает проблему срыва потока. После вертикального взлета и набора высоты для перехода на самолетный режим полета три поворотных винта 16 и 17 синхронно устанавливаются в горизонтальное положение (см. фиг.1). После чего закрываются проемы 19 и производится крейсерский полет, при котором путевое управление обеспечивается рулями направления 9. Продольное или поперечное управление может осуществляться синфазным или дифференциальным отклонением консолей ЦПС 13 соответственно. На самолетных режимах полета БДВС при создании горизонтальной тяги его передний винт 16 имеет взаимно противоположное вращение с задними винтами 17 и тем самым весьма повышает эффективность винтомоторной группы. При его полетной вертолетоподобной конфигурации трехвинтовой несущей схемы реактивные моменты от поворотных винтов 16 и 17, используемых как несущие винты, компенсируются полностью за счет также взаимно противоположного их вращения.
Таким образом, высокоскоростной БДВС с конструктивно-силовой двухфюзеляжной схемой, передним и задними поворотными винтами, двухкилевым оперением и разнесенными консолями цельноповоротного стабилизатора, представляет собой беспилотный трехвинтовой конвертоплан продольной схемы триплана. Поворотные реверсивные винты с жестким креплением лопастей, создающие вертикальную и соответствующим отклонением горизонтальную тягу, обеспечивают как необходимые управляющие моменты, так и уменьшение дистанции при посадке с пробегом. Причем ПГО находится впереди крыла и создает дополнительную подъемную силу и разгружает его, что и предопределяет наравне с высокой тяговооруженностью СУ БДВС возможность легко реализовать и выполнение как ВВП и КВП, так и короткого взлета и вертикальной посадки (КВВП). Последнее, весьма, важно при палубном базировании, т.к. обеспечивает короткий взлет (достаточно и 60…70 м) с максимальным его весом и вертикальную его посадку пустого на палубу авианесущего корабля (АНК).
Поскольку главными возможностями трехвинтовых конвертопланов продольной схемы триплана, особенно, с двумя фюзеляжами, имеющими удобообтекаемую S-образную форму в продольной плоскости, являются: сниженное аэродинамическое их сопротивление; высокий КПД тандемных с взаимно противоположным вращением переднего и задних винтов; меньшая масса планера, редукторов и трансмиссии. Поэтому все возрастающие исследования по созданию высокоскоростных БДВС, используя вышеназванные преимущества, становится возможным освоить их семейство.
Не исключено освоение и двухфюзеляжных трехвинтовых вертолетов-самолетов (ДТВС) с рабочей станцией для управления БДВС и совместного их боевого применения. По целому комплексу показателей палубные ДТВС и БДВС КВВП будут значительно превосходить, в первую очередь палубные вертолеты, например, модели "Tiger" ("Eurocopter"), базируемые на вертолетоносце (класса "Mistral") и имеющие необходимую в ангаре стояночную площадь в 1,25 раза большую, чем для БДВС. Последнее позволит увеличить количество БДВС в авиагруппе до пяти единиц и плюс пять ДТВС, действующих с восьми взамен шести площадок одного вертолетоносца ("Mistral"). Поэтому эффективность авиагруппы с десятью единицами таких ДТВС и БДВС взамен одной авиагруппы из восьми единиц палубных вертолетов "Tiger" или Ка-52К становится равной эффективности авиагруппы почти тридцати единиц таких штурмовых вертолетов, действующих, например, почти с четырех таких вертолетоносцев. Применение палубных БДВС и ДТВС на вертолетоносцах и средних АНК позволит, используя технологию КВВП и увеличивая радиус их действия в 1,5 раза, применять их и для снабжения АНК в морских авианосных системах (MAC).
Поскольку возможные формы и аэродинамические компоновки самолетов, выполненных по двухфюзеляжной схеме с двухкилевым оперением и продольной схеме триплана соответственно мод. "Twin-Mustang ХР-82" (США) и "Р.180 Avanti" (Италия), а также конвертопланов с трехвинтовыми несущими схемами, например, мод. "Panther" (Израиль), о которых в настоящее время известно, что конструктивно-силовые двухфюзеляжная и, особенно, продольная схема триплана самолетов обеспечивает максимальную разгрузку крыла и фюзеляжа от действия аэродинамических и массовых сил, а трехвинтовые конвертопланы, что они устойчивы и управляемы, то, следовательно, все они пригодны для дальнейших инженерных приложений, могут и должны являться предметом дальнейшего исследования и усовершенствования.
Поэтому освоение БДВС и ДТВС, особенно, по концепции тандемного расположения винтов (ТРПВ) по схеме 1+2 обусловлено также простотой его общей трансмиссии, что позволит, уменьшая общие потери вертикальной тяги винтов (потери от обдува консолей крыла и центральных и кормовых гондол отличаются в 3,5 раз), реализовать при технологии ВВП более полное использование вертикальной тяговооруженности. Последнее позволит, уменьшая удельный вес СУ, значительно увеличить удельный вес топлива и, как следствие, повысить дальность БДВС и ДТВС до 3200-4800 км, сопоставимую с дальностью турбовинтового самолета. Очевидно, создание для авиатранспорта семейства БДВС и ДТВС по продольной схеме триплана и конструктивно-силовой двухфюзеляжной схеме позволит, исключая недостатки конвертопланов "Eagle Eye" и "Panther", освоить по концепции ТРПВ-Х1+2 широкую их гамму. Важной особенностью применения данной концепции в БДВС и ДТВС, обеспечивающей качественный рост потребительских свойств, является то, что она масштабируемая и позволяющая наряду с легкими и средними высокоскоростными БДВС и ДТВС, также освоить и тяжелые БДВС исполнения ТРПВ-Х1+2. Возможно освоение, например, и двухместного палубного ДТВС-1,2 с двумя ГТД мод. ВК-1500 (мощностью по 1600 л.с.), обеспечивающими по технологии ВВП и КВВП соответственно взлетный вес 6,0 и 7,67 тис соответствующей ПН в грузовых отсеках 1,2 и 2,5 т, позволит реализовать реально высокие технико-экономические результаты, позволяющие достойно конкурировать с фирмами "Bell/Agusta" и "Oliver-VTOL" (США).
Высокоскоростные БДВС и ДТВС - перспективное направление и достижимое близкое будущее для винтокрылой авиации, особенно, палубной авиации КВВП. Для последней при радиусе ее действия до 2400 км и при использовании БДВС и ДТВС, имеющих скорости до 725-800 км/ч и полезную нагрузку (ПН) до 2,5 т, позволит весьма улучшить критерий (ПН х дальность действия), который будет в три раза превосходить возможности скоростных вертолетов, например, Sikorsky S-97 «Raider», который в свою очередь превосходит в 2 раза современные палубные вертолеты.
Очевидно, создание семейства высокоскоростных БДВС и ДТВС с улучшенными тактико-техническими показателями для АНК и MAC в современных условиях - задача многоплановая и не является технически неразрешимой. Поэтому в процессе дальнейшего развития винтокрылой палубной авиации, широко использующей сейчас малоскоростные вертолеты двухвинтовой соосной и одновинтовой несущей схемы, самой жизнью будет продиктована задача и широкого освоения БДВС и ДТВС.
Литература
1. Дуров Д.С. Многоцелевой дистанционно пилотируемый вертолет-самолет (Патент РФ №2370414), 11.02.2008 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯЖЕЛЫЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ (ВАРИАНТЫ) | 2012 |
|
RU2492112C1 |
| ВЫСОКОСКОРОСТНОЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2464203C2 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| МНОГОЦЕЛЕВОЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2650258C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2013 |
|
RU2527248C1 |
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| КРИОГЕННЫЙ ТУРБОЭЛЕКТРИЧЕСКИЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2534676C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
Изобретение относится к области авиационной техники и может быть использовано в конструкции беспилотных летательных аппаратов. Беспилотный двухфюзеляжный вертолет-самолет представляет собой моноплан с передним горизонтальным оперением, содержащий двухкилевое оперение, смонтированное к консолям крыла на гондолах, короткий фюзеляж, двигатель, передающий крутящий момент через систему валов трансмиссии на тянущий и толкающий поворотные винты, обеспечивающие горизонтальную и соответствующим отклонением вертикальную тягу. Вертолет-самолет выполнен по конструктивно-силовой двухфюзеляжной схеме и концепции тандемного расположения разновеликих поворотных винтов по схеме 1+2. Плоскость вращения лопастей переднего большего винта при создании им вертикальной тяги расположена в межфюзеляжном пространстве, ограниченном внутренними бортами фюзеляжей, задней и передней кромками. Система трансмиссии включает кормовые редукторы двух меньших поворотных винтов и центральный Т-образный в плане главный редуктор. Достигается повышение весовой отдачи и улучшение взлетно-посадочных характеристик при коротком взлете и посадке. 2 з.п. ф-лы, 2 ил.
1. Беспилотный двухфюзеляжный вертолет-самолет, представляющий собой высокорасположенный моноплан с передним горизонтальным оперением, содержащий двухкилевое оперение, смонтированное к консолям крыла на гондолах, газотурбинный двигатель силовой установки, передающий мощность через соединительные и синхронизирующий валы на поворотные тянущий и толкающий винты, расположенные соответственно в носовой и задней части короткого фюзеляжа, обеспечивающие горизонтальную и соответствующим отклонением вертикальную тягу, трехстоечное неубирающееся колесное шасси, с носовой вспомогательной и главными боковыми опорами, отличающийся тем, что он выполнен по конструктивно-силовой двухфюзеляжной схеме и концепции тандемного расположения разновеликих поворотных винтов по схеме 1+2 таким образом, что передний больший винт и два задних меньших винта, расположенные вдоль соответственно плоскости симметрии и продольной оси соответствующего фюзеляжа и размещенные соответственно в направлении полета спереди и сзади от центра масс, имеют на вертолетных режимах полета равновеликие расстояния от вертикальных их осей до центра масс, но и снабжен возможностью преобразования его полетной конфигурации как с вертолета трехвинтовой несущей схемы, включающей один передний и два задних винта, имеющих при этом плоскости вращения их лопастей соответственно над и под средней линией крыла, но и противоположное направление вращения между передним и задними винтами при одинаковом направлении вращения задних винтов между собой, в двухфюзеляжный трехвинтовой самолет продольной схемы триплана, так и обратно; диаметры переднего и задних винтов определяются из соотношения: D=d×√2, м (где: D и d - диаметры переднего большего и задних меньших поворотных винтов соответственно), при этом плоскость вращения лопастей переднего большего винта, создающего вертикальную тягу и расположенного над межфюзеляжным пространством, ограниченным в плане внутренними бортами фюзеляжей, задней и передней кромками, имеющими соответственно прямую и обратную стреловидность, образованные относительно оси симметрии на соответствующих межфюзеляжных частях переднего горизонтального оперения и крыла, размещена с возможностью его вращения без обдува как первых и вторых межфюзеляжных плоскостей, так и фюзеляжей, межфюзеляжные части переднего горизонтального оперения и крыла, выполненные соответственно с отрицательным и положительным углами поперечного V, позволяющими уменьшить высоту стоек шасси и увеличить высоту расположения излома межфюзеляжной части крыла, оснащены по оси симметрии соответственно передней гондолой, снабженной снизу створками, закрывающими нишу убирания носовой стойки шасси, и на изломе крыла центральной гондолой с передним большим винтом, вынесенным за точку сопряжения передней кромки межфюзеляжной части крыла, и сзади от носка последней двумя мотогондолами, снабженными двигателями, выполненными с передним выводом вала для отбора взлетной их мощности и связанными с главным редуктором, система трансмиссии, включающаяся наряду с кормовыми редукторами двух задних меньших винтов центральный Т-образный в плане главный редуктор, обеспечивающий неравномерное распределение взлетной мощности (Nв) силовой установки между передним и задними винтами и снабженный в направлении полета передним и боковыми левым и правым выходными валами, а также для присоединения двигателей двумя задними входными валами, расположенными по обе стороны от оси симметрии, передний выходной вал главного редуктора, снабженный соответствующим соединительным валом, проходящим в центральной гондоле, связан с передним редуктором большего винта, а боковые левый и правый выходные валы снабжены соответствующими поперечно-продольными Г-образными в плане соединительными валами, проходящими в межфюзеляжной части крыла и соответствующей кормовой части каждого фюзеляжа, обеспечивают перегибы в плане от главного редуктора к соответствующим кормовым редукторам задних меньших винтов, система управления снабжена стабилизирующей системой со специальным интегрирующим устройством, автоматически изменяющим отклонение аэродинамических рулей управления по тангажу и крену и обеспечивающим управление общим шагом всех винтов в зависимости от угла поворота переднего большего винта и стабилизацию по угловой скорости по тангажу и крену, а также демпфирование рыскания и изменений высоты полета.
2. Беспилотный двухфюзеляжный вертолет-самолет по п.1, отличающийся тем, что с целью повышения при вертикальном взлете, посадке и висении эффективности управления по рысканью и путевой стабилизации главный редуктор обеспечивает возможность передачи взлетной мощности силовой установки на передний и задние винты соответственно меньшую и большую ее части, первая из которых определяется из соотношения: 
3. Беспилотный двухфюзеляжный вертолет-самолет по п.1 или 2, отличающийся тем, что с целью исключения близкого расположения задних винтов к поверхности земли на режимах вертикального взлета и посадки плоскости вращения лопастей переднего большего и задних меньших винтов, осуществляющих тягу по тянущей схеме, расположены соответственно над центральной гондолой и тонкими плавно образованными кормовыми частями фюзеляжей, при этом задние меньшие винты в каждом конечном положении их поворота при создании ими вертикальной или горизонтальной тяги снабжены возможностью осуществлять тягу соответственно по тянущей или толкающей схеме, а на переходных режимах полета обеспечивать синхронный ускоренный поворот задних винтов вниз или обратно вверх при нулевом угле установки их лопастей после или до установки переднего большего винта, соответственно, для создания им горизонтальной или вертикальной тяги.
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2002 |
|
RU2213024C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1992 |
|
RU2028964C1 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
| US 6655631 B2, 02.12.2003. | |||

