Изобретение относится к области авиационной техники и может быть использовано в конструкции высокоскоростных многовинтовых вертолетов-самолетов с поворотными винтами, применяющих технологии вертикального взлета и посадки, короткого взлета и посадки или короткого взлета и вертикальной посадки для наземного, корабельного и аэродромного или палубного базирования.
Известен палубный конвертоплан мод. «Оспри HV-22» (США) [1 стр.27], представляющий собой моноплан с высокорасположенным крылом обратной стреловидности и на концах его консолей смонтированы двигатели с редукторами и винтами, установленные в поворотных мотогондолах, при повороте которых он преобразовывается в вертолет двухвинтовой поперечной схемы, имеющий трансмиссию с синхронизирующим валов, проложенным в крыле, двухкилевое оперение и шасси трехопорное, убирающееся в носовой отсек и герметичные боковые обтекатели.
Признаки, совпадающие - наличие поворотных мотогондол с тянущими винтами, создающими горизонтальную и соответствующим отклонением вертикальную тягу, диапазон поворота винтов от 0° до +97,5°, при корабельном базировании лопасти винтов складываются и высокорасположенное крыло разворачивается вдоль верхней части фюзеляжа, избыточная тяговооруженность обеспечивает полет и на одном работающем двигателе, шасси трехопорное, убирающееся в герметичные носовой отсек и боковые обтекатели, обеспечивающие аварийную посадку на воду.
Причины, препятствующие поставленной задаче: первая - это то, что консольное размещение на концах крыла поворотных двигателей с редукторами и винтами предопределяет конструктивно сложное прямое крыло, оснащенное сложной системой поворота винтов и механизации крыла, что усложняет конструкцию и уменьшает надежность. Вторая - диаметры двух винтов ограничены размахом консолей крыла и, как следствие, при висении поток от винтов, обдувая консоли крыла и создавая значительную общую потерю (порядка 23%) в вертикальной их тяге, затормаживается и большие скорости потока, отбрасываемого от них, предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - горизонтальная тяга винтов обеспечивается только в крейсерском полете, поэтому взлетать и садиться «по-самолетному», как обычный самолет, этот конвертоплан не может, т.к. расположенные на концах крыла поворотные двигатели, имеющие диаметры винтов, превышающие высоту установки их мотогондол, но это не исключает возможности короткого его взлета и посадки.
Известен конвертоплан мод. «Хиллер 1045» (США) [1 стр.173], содержащий моноплан с высокорасположенным крылом и поворотными его консолями с тянущими винтами, создающими горизонтальную и вертикальную тягу соответствующим их отклонением от горизонтального положения, силовую установку, включающую два двигателя с редукторами, расположенные в гондолах на консолях под крылом, трансмиссию с системой валов и хвостовое оперение с рулевыми соосными винтами.
Признаки, совпадающие - наличие поворотных элементов крыла с тянущими винтами, преобразующими горизонтальную тягу в вертикальную соответствующим их отклонением совместно с консолью крыла вверх от горизонтального положения на угол 90°, диапазон поворота крыла от 0° до +100°, вращение винтов - синхронизирующее, крыло малого удлинения, два главных и один рулевой винты.
Причины, препятствующие поставленной задаче: первая - это то, что консольное расположение поворотных элементов крыла с двигателем, редуктором и винтами предопределяет конструктивно сложное прямое крыло, снабженное верхней и нижней панелями обшивки и оснащенное сложной системой поворота и механизации крыла, что усложняет конструкцию и уменьшает надежность. Вторая - это то, что поворотные элементы крыла с винтами с увеличением его угла атаки на переходных режимах полета создают опасность появления на крыле срыва потока до создания винтами необходимой подъемной силы, что снижает надежность и безопасность. Третья - это то, что рулевые винты продольного управления, выполненные трехлопастными с изменяемым шагом, установлены в хвостовой части фюзеляжа и смонтированы на хвостовой складывающейся балке. Это усложняет конструкцию и предопределяет использование специального интегрирующего устройства управления, которое на переходных режимах полета с учетом возможного срыва потока на крыле не обеспечивает достаточную стабильностью управления и значительно увеличивает опасность, создаваемую рулевыми винтами для наземного персонала на вертолетных режимах полета.
Наиболее близким к предлагаемому изобретению является многоцелевой дистанционно пилотируемый вертолет-самолет (Россия) [2], представляющий собой высокорасположенный моноплан, содержащий двухкилевое оперение, фюзеляж, двигатель силовой установки, передающий мощность через соединительные и синхронизирующий валы, расположенные по оси симметрии, на тянущий и толкающий поворотные винты, обеспечивающие горизонтальную и их отклонением от горизонтального положения соответственно вверх и вниз вертикальную тягу, трехопорное убирающееся колесное шасси, с носовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие - наличие моноплана с передним горизонтальным оперением (ПГО) и высокорасположенным крылом, снабженным на гондолах разнесенным двухкилевым оперением и наплывами, объединяющими в единую конструкцию крыло и фюзеляж. Поворотные (отклоняемые) тянущий и толкающий винты, расположенные соответственно в передней и задней частях короткого фюзеляжа, обеспечивающие горизонтальную тягу и соответствующим отклонением вверх и вниз от горизонтального положения вертикальную на угол 90° или наклонную тягу на угол 65° соответственно при вертикальном взлете и посадке или коротком взлете и посадке.
Причины, препятствующие поставленной задаче: первая - это то, что диаметры носового и хвостового винтов ограничены высотою стоек, особенно, главного шасси и, как следствие, это ограничивает вертикальную тяговооруженность, а его однодвигательная силовая установка, снижая надежность крейсерского полета при его отказе, ограничивает взлетный вес и с целью его увеличения предопределяет при взлете-посадке «по-самолетному» возможность только короткого взлета-посадки с отклоненными винтами на угол 65°. Вторая - это то, что при переходных маневрах продольная устойчивость обеспечивается парой несущих поверхностей: ПГО и крылом, что снижает стабильность управления из-за разных скоростей поворота при отклонении носового винта и цельноповоротного ПГО, т.к. срыв потока на последнем может происходить резко и быстро. Третья - это то, что при висении продольное расположение поворотных винтов изменяемого шага и с управлением циклического их шага значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автоматов их перекоса, создающие неблагоприятные условия для работы других механизмов и оборудования, весьма снижают разрешающую способность аэрофотосъемочной аппаратуры. Все это ограничивает увеличение продольной стабильности и поперечной управляемости, но и повышение наработки на отказ и безотказности.
Предлагаемым изобретением решается задача в указанном выше известном многоцелевом дистанционно пилотируемом вертолете-самолете значительного увеличения надежности и безопасности полетов, повышения наработки на отказ и безотказности, улучшения продольной устойчивости и устойчивости по крену, но и продольной стабильности и поперечной управляемости при переходных маневрах и висении, повышения взлетного веса и увеличения весовой отдачи.
Отличительными признаками предлагаемого изобретения от указанного выше известного многоцелевого дистанционно пилотируемого вертолета-самолета, наиболее близкого к нему, являются наличие того, что он выполнен в виде конвертоплана по концепции тандемного расположения поворотных винтов на крыле и модульной конструкции, имеющего на крыле по меньшей мере две мотогондолы, каждая из которых имеет переднюю и заднюю продолговатые, вынесенные за соответствующие кромки крыла, надкрыльевые ее части, в передних и задних окончаниях которых смонтированы соответствующие поворотные винты, позволяющие обеспечивать возможность преобразования полетной его конфигурации как в четырехвинтовой самолет, имеющий две двухвинтовые тандемные движительные схемы, включающие два передних и два задних винта, горизонтальные оси поворотных валов которых, расположенные выше плоскости средней линии крыла и на одном уровне, так и в четырехвинтовой вертолет, имеющий две расположенные тандемом двухвинтовые поперечные несущие схемы, включающие два передних и два задних винта, плоскости вращения лопастей которых, создавая вертикальную их тягу и возможность при этом их вращения без обдува консолей крыла, размещены соответственно как выше и ниже соответствующих надкрыльевых частей мотогондол, так перед и за крылом, расположенным, обеспечивая минимальное значение предельно задней центровки, в аэродинамической его компоновке при максимально заднем расположении центра масс, но и обратно, причем компенсируя увеличение нагрузки на задние винты, обдуваемые передними винтами при переходных маневрах, и при висении, сохраняя равномерное распределение мощности силовой установки между передними и задним винтами одинакового диаметра и уменьшая нагрузку на задние винты, конструктивно в аэродинамической его компоновке центр масс между винтами размещен в плане со смещением на 1% к вертикальной оси передних винтов, трансмиссия, имеющая по два редуктора винтов, основному и промежуточному редукторам для каждого двигателя, представляющая собой Н-образную в плане конфигурацию и включающая наряду с продольными системами валов, расположенными вдоль продольной оси соответствующей мотогондолы и связывающими в каждой мотогондоле редукторы винтов с основным редуктором, приводимым через промежуточный редуктор отдельным двигателем, имеет поперечный синхронизирующий вал, расположенный в носке крыла, объединяет все винты так, что, имея взаимнопротивоположное вращение между собой левый с правым как передние, так и задние винты, имеют их вращение с набеганием по направлению к фюзеляжу на самолетных и вертолетных режимах полета соответственно как нижней и дальней от передней кромки крыла лопасти, так верхней и дальней от задней кромки крыла лопасти соответствующих винтов и связывающий между собой двигатели через соответствующие Т-образные в плане промежуточные редукторы, обеспечивает привод всех винтов и от одного работающего двигателя в случае отказа другого или создающего избыточную мощность силовой установки.
Благодаря наличию этих признаков это позволит увеличить взлетный вес и весовую отдачу, но и обеспечить при размещении на крыле четырех модулей-мотогондол двухкратное увеличение взлетного веса, а при наличии поперечного синхронизирующего вала, расположенного в носке крыла и связывающего в Н-образной в плане трансмиссии все модули-мотогондолы и все поворотные винты - надежность и безопасность полетов многоцелевого вертолета-самолета, выполненного в виде конвертоплана по концепции тандемного расположения поворотных винтов на крыле и модульной конструкции, имеет на крыле по меньшей мере две мотогондолы, каждая из которых снабжена двухвинтовой тандемной схемой, вынесенной на передних и задних продолговатых надкрыльевых гондолах, имеющих в передних и задних их окончаниях соответствующие поворотные винты. Что позволит обеспечивать возможность преобразования его полетной конфигурации с четырехвинтового вертолета, имеющего две расположенные тандемом двухвинтовые поперечные схемы, включающие два передних и два задних винта, отклоненные соответственно вверх и вниз и расположенные перед и за крылом, в четырехвинтовой самолет, имеющий на концах мотогондол две двухвинтовые тандемные движительные схемы, включающие передние два тянущих и задние два толкающих винта, горизонтальные оси поворотных валов которых расположены на одном уровне и вдоль единой оси надкрыльевых гондол, но и обратно. При этом группы винтов, имея взаимно противоположное вращение между собой, передние и задние, но и передние левый и правый винты, задние левый и правый винты снабжены также возможностью противоположного их вращения с набеганием по направлению к фюзеляжу на самолетных и вертолетных режимах полета соответственно верхней и дальней от задней кромки крыла лопасти. Такое расположение тянущих и толкающих винтов в центральной части фюзеляжа также благоприятно сказывается на уменьшении сопротивлений носовой и кормовой частей фюзеляжа за счет эффекта отсоса пограничного слоя перед этими винтами. При этом высокорасположенное крыло, размещенное, обеспечивая минимальное значение предельно задней центровки, в аэродинамической его компоновке при максимально заднем расположении центра масс, позволяет уменьшить вылет надкрыльевых гондол и, особенно, передних. Проведенные различные исследования показывают, что при расположении мотогондол на крыле с передней группой и с задней группой винтов, за счет использования тянущих и толкающих расположенных тандемом винтов с противоположным их вращением, можно получить значительное увеличение КПД каждой винтомоторной группы. Поскольку этот вариант обеспечивает и более обтекаемую форму каждой мотогондолы и, соответственно, ее меньшее как аэродинамическое сопротивление, так и затенение поворотных винтов при вертикальном взлете, посадке и висении и, как следствие, уменьшение потерь в вертикальной их тяге. Кроме этого даже и четырехвинтовая его схема позволяет как при удельной нагрузке на ометаемую площадь ρS=80…170 кг/м2 винтами при висении, так и при удельной нагрузке на мощность силовой установки ρN=1,7…2,5 кг/л.с. обеспечить в самолетной конфигурации больший клиренс лопастей винтов увеличенного диаметра, что обеспечит ему, как обычному самолету, крейсерский полет и взлетать, и садиться «по-самолетному». В крейсерском полете, используя один из двух двигателей силовой установки, это позволит увеличить их наработку на отказ и значительно повысить безотказность.
Предлагаемое изобретение многоцелевого многовинтового вертолета-самолета (ММВС), выполненного по концепции тандемного расположения поворотных винтов на крыле, и варианты его использования представлены на фиг.1…2.
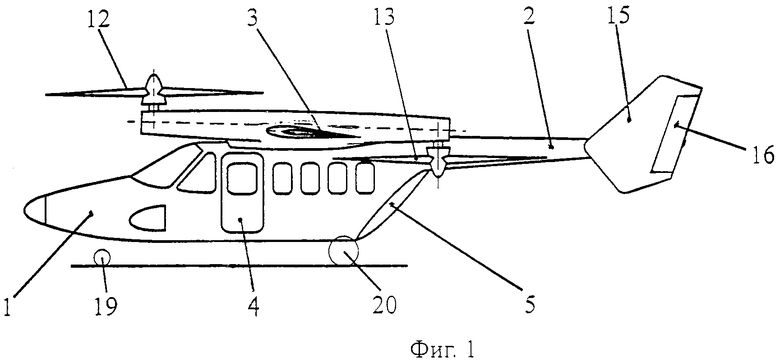
На фиг.1 изображен ММВС в вертолетоподобной полетной конфигурации общий вид сбоку с расположением перед и за крылом поворотных винтов в четырехвинтовой несущей схеме на режимах его вертикального взлета, посадки и висения.
На фиг.2 изображен ММВС в полетной конфигурации самолета общий вид сверху с тандемным расположением поворотных винтов передних и задних в четырехвинтовой движительной схеме на самолетных режимах его полета.
Многоцелевой вертолет-самолет, выполненный по многовинтовой схеме конвертоплана блочно-модульной конструкции и представленный на фиг.1…2, содержит фюзеляж 1, имеющий удобообтекаемую форму и хвостовую тонкую балку 2, плавно образованную на уровне высокорасположенного крыла 3. По бокам и в передней части фюзеляжа 1 расположены соответственно две сдвижные двери 4 и задняя дверь 5, секция которой открывается вниз, образуя погрузочную рампу на земле. На консолях 6 трапециевидного крыла 3, имеющего рулевые поверхности 7 и 8, работающие соответственно в режиме закрылок и элеронов, смонтированы мотогондолы 9, имеющие передние 10 и задние 11 продолговатые надкрыльевые гондолы. В передних и задних окончаниях последних смонтированы поворотные корпуса с соответствующими выходными валами редукторов винтов соответственно с тянущими 12 и толкающими 13 винтами. При этом реверсивные винты передние 12 и задние 13, выполненные с жестким креплением лопастей и возможностью изменения углов их установки, смонтированы в соответствующих обтекателях, имеющих соответственно сверху от начала и снизу от конца раскрываемые продольные проемы 14, снабженные направляющими для поворота корпуса поворотного вала с винтом соответствующего редуктора. Поворот трехлопастных винтов 12 и 13, преобразующих его полетную конфигурацию с четырехвинтового вертолета, имеющего две расположенные тандемом двухвинтовые поперечные схемы в четырехвинтовой самолет, имеющий на концах мотогондол две двухвинтовые тандемные движительные схемы, включающие передние два тянущих 12 и задние два толкающих 13 винта, осуществляется с помощью электромеханических приводов (на фиг.1-2 не показаны). При этом крыло 3 большого удлинения, предопределяющего уменьшение его ширины и, как следствие, значительно уменьшающего также вылет и надкрыльевых гондол и, особенно, передних 10, имеет концевые части 6, выполненные отклоняющимися вверх для удобства размещения на палубе и возможности эксплуатации на кораблях. Двухкилевое оперение 15, оснащенное рулями направления 16, снабжено горизонтальным оперением 17 с рулями высоты 18.
Силовая установка (СУ), расположенная на крыле 3 в мотогондолах 9, имеет, например, турбовинтовые двигатели (ТВД), установленные с максимальной их простотой обслуживания и эксплуатации. Мощность от ТВД передается поворотным винтам, посредством системы трансмиссии, связанной с передними и задними редукторами винтов (на фиг.1-2 не показаны). Выходные валы первых снабжены возможностью их поворота с тянущими винтами 12 относительно оси соответствующего редуктора винта вверх от горизонтального положения параллельно плоскости симметрии, а выходные валы вторых редукторов с толкающими винтами 13 - вниз синхронно первым (см. фиг.1). Трансмиссия имеет по два редуктора винтов, основному и промежуточному редукторам для каждого двигателя, представляет собой Н-образную в плане конфигурацию и включает наряду с продольными системами валов, расположенными вдоль продольной оси соответствующей мотогондолы, связывают в каждой мотогондоле редукторы винтов с основным редуктором, приводимым через промежуточный редуктор отдельным двигателем, имеет поперечный синхронизирующий вал, расположенный в носке крыла, связывающий между собой двигатели через соответствующие Т-образные в плане промежуточные редукторы, обеспечивает привод всех винтов и от одного двигателя. Избыточная тяговооруженность СУ, обеспечивающая вертикальный взлет, посадку и висение ММВС, предопределяет в крейсерском его полете муфтами сцепления отключение любого избыточного ТВД или одного из них при отказе (на фиг.1…2 не показаны). В случае отказа двух ТВД, возможна посадка в конфигурации вертолета на режиме авторотации его несущих винтов 12 и 13. Трехопорное убирающееся шасси, передняя опора с колесом 19 убирается в носовой отсек фюзеляжа 1, главные боковые опоры с колесами 20 - в борт-отсеки фюзеляжа 1.
Управление ММВС обеспечивается общим и дифференциальным изменением шага поворотных винтов двух тянущих 12 и двух толкающих 13 и отклонением рулевых поверхностей 8, 16 и 18, работающих в зоне активного обдува этих винтов. При крейсерском полете подъемная сила создается крылом 3, горизонтальная тяга - винтами 12 и 13, на режиме висения только винтами 12 и 13, на режиме перехода - крылом 3 и винтами 12 и 13. При переходе к вертикальному взлету-посадке (висению) раскрываются проемы 14 и затем закрылки 7 отклоняются на максимальные их углы синхронно с поворотов винтов 12 и 13 параллельно плоскости симметрии от горизонтального положения, отклоняясь соответственно вверх и вниз, устанавливаются вертикально (см. фиг.1). При переходе с самолетного режима полета на режим висения и если возникает момент тангажа (Mz), то он парируется отклонением рулей высоты 18, создающих, работая в зоне вихрей от обдува горизонтального оперения 17, парирующую силу. После установки поворотных винтов тянущих 12 и толкающих 13 в вертикальное положение вдоль линий вертикальной их тяги осуществляется возможность вертолетных режимов полета. С приближением к поверхности земли (палубы корабля) и полете вблизи них винты 12 и 13, имея взаимно противоположное их вращение, образуют под ММВС область уплотненного воздуха, создающего эффект воздушной подушки и тем самым повышают их эффективность. Поворотные реверсивные винты 12 и 13 отклоняются от горизонтального положения вверх и вниз на угол 90° и 65° соответственно при вертикальном взлете (посадке) и взлете с коротким разбегом (посадке с коротким пробегом) ММВС на вертолетных и самолетных режимах его полета. Для соответствующей посадки ММВС на поверхность земли (палубы корабля) используются колеса 19 и 20 убирающегося шасси.
При вертикальном взлете, посадке и висении продольное управление осуществляется путем изменения шага пары передних 12 и пары задних 13 винтов, поперечное управление - изменением шага левой и правой пары групп винтов переднего 12 и заднего 13, путевое управление - изменением крутящих моментов диагонально расположенных винтов передних 12 и задних 13. При этом поворотные винты, расположенные по диагонали, снабжены возможностью одинакового направления их вращения и противоположного - между их диагональными группами (см. фиг.2). Поэтому винты имеют одинаковое направление вращения: передний 12 правый с левым задним 13 винтом и передний 12 левый с правым задним 13 винтом, выполнены с возможностью синхронного изменения углов установки их лопастей. Причем, увеличиваясь на двух первых и одновременно уменьшаясь на двух других винтах, при соответствующем создании изменения крутящих моментов этих групп винтов и тем самым обеспечивается путевое управление. При этом полный момент рыскания образуется без изменения тангажа, крена и вертикальной тяги.
После вертикального взлета и набора высоты для перехода на самолетный режим полета четыре поворотных винта 12 и 13, синхронно устанавливаются в горизонтальное положение. После чего производится горизонтальный крейсерский полет, при котором путевое управление обеспечивается рулями направления 16 (см. фиг.1). Продольное и поперечное управление может осуществляться отклонением соответственно рулевых поверхностей - рулей высоты 18 и элеронов 8. При полетной конфигурации ММВС на самолетных режимах полета пары винтов левой и правой групп винтов передних тянущих 12 и задних толкающих 13 имеют в каждой группе противоположное вращение для создания горизонтальной тяги, тем самым создает значительное повышение эффективности каждой винтомоторной группы. При его полетной (конфигурации как вертолета реактивные моменты от винтов, используемых как несущие винты, смонтированные попарно, компенсируются полностью также за счет того, что снабжены возможностью взаимно противоположного вращения между собой как передние 12, так и задние 13 винты, но и левой, и правой групп (см. фиг.2).
Таким образом многоцелевой вертолет-самолет, выполненный по концепции тандемного расположения поворотных винтов на крыле и в виде высокорасположенного моноплана, имеет на крыле две мотогондолы, каждая из которых снабжена двухвинтовой тандемной схемой, вынесенной за переднюю и заднюю кромки крыла на соответствующих продолговатых надкрыльевых гондолах, имеющих в передних и задних их окончаниях соответствующие поворотные винты, представляет собой многовинтовой конвертоплан. Выбор концепции тандемного расположения поворотных винтов (ТРПВ) и такой схемы ММВС обусловлен простотой и возможностью преобразования его полетной конфигурации с вертолетоподобной четырехвинтовой несущей схемы в полетную конфигурацию четырехвинтового самолета и обратно. При этом выбор аэродинамической схемы не всегда диктуется только соображениями получения наилучших летно-технических характеристик. Поэтому при формировании компоновки такого ММВС большую роль играет необходимость обеспечения определенного уровня надежности, безопасности полета, включая (при отказе узлов поворота винтов) взлетать и садиться «по-самолетному», условия базирования, эксплуатационная технологичность и даже внешний другой его облик с возможным размещением на крыле четырех модулей-мотогондол для двухкратного увеличения взлетного веса. Кроме того, к числу основных требований, предъявляемых к ММВС, относятся повышенная безопасность при простоте пилотирования, малая чувствительность к ошибкам пилота при выполнении переходного маневра и заходе на посадку как вертикальную, так и с коротким пробегом. Снижение аварийности достигается, в первую очередь, уменьшением скорости захода на посадку, а также принятием специальных мер, обеспечивающих ММВС хорошие противосрывные и противоштопорные характеристики. Анализ аварийности показывает, что вероятность летного происшествия наибольшая на посадочных режимах. Поэтому обосновано желание эксплуатантов ММВС иметь четырехвинтовую его несущую схему и получить наименьшую возможную посадочную скорость и, особенно, при выполнении переходного маневра и заходе на зависание и во время самой вертикальной посадки. При этом установка по концепции ТРПВ мотогондол на крыле с двумя передними и двумя задними винтами концепции ТРПВ предопределяет, повышая продольную стабильность и поперечную управляемость, значительное увеличение продольных, поперечных и путевых характеристик ММВС. Поэтому с этой точки зрения схема размещения модулей-мотогондол на крыле, принятая на ММВС в сочетании с двухкилевым оперением и двумя тянущими и двумя толкающими поворотными винтами, является наиболее предпочтительной схемой. Причем с целью минимизации затрат и сокращения сроков освоения таких высокоскоростных ММВС целесообразно их производить на основе поэтапной модернизации существующих конструкций грузопассажирских самолетов, выполненных по аэродинамической схеме высокорасположенного моноплана.
Поскольку без создания эффективной системы транспорта дальнейшее освоение регионов Сибири, Дальнего Востока и Крайнего Севера невозможно, то качественно новым подходом к освоению любых неподготовленных поверхностей земли и корабельных площадок остается за использованием высокоскоростных ММВС. Причем широкое их использование позволит в полной мере осуществить создание специальной транспортной системы для воздушных грузопассажирских перевозок и возможность обеспечения транспортной связью этих регионов. Поэтому на сегодня одной из инновационных задач может являться создание ряда моделей высокоскоростных ММВС, которые могут использовать технологию вертикального взлета и посадки (ВВП), но и короткого взлета и посадки (КВП). При этом ближайшее развитие таких MMBC, выполненных по блочно-модульной конструкции для палубной, военно-транспортной, региональной и деловой авиации, позволит и, особенно, для труднодоступной местности решать транспортные задачи на расстояния до 2300…3600 км лучше, чем это может быть сделано при помощи скоростных вертолетов и даже турбовинтовых самолетов. Широкое освоение ММВС по концепции ТРПВ обусловлено также простотой его общей трансмиссии, что позволит, уменьшая общие потери вертикальной тяги винтов (разница от обдува консолей крыла и надкрыльевых частей мотогондол очевидна), реализовать при технологии ВВП более полное использование вертикальной тяговооруженности. Последнее позволит, уменьшая удельный вес СУ, значительно увеличить удельный вес топлива и, как следствие, повысить дальность полета ММВС, сопоставимую с дальностью турбовинтового самолета. Кроме того, воздушные потоки от передних тянущих и задних толкающих винтов, расположенных тандемом в соответствующих надкрыльевых частях каждой мотогондолы, обдувая верхнюю поверхность крыла, значительно улучшают взлетно-посадочные характеристики ММВС. Следует отметить, что, создавая также легкие и тяжелые многовинтовые вертолеты-самолеты (ЛМВС и ТМВС), выполненные по концепции ТРПВ, становится возможным без «симметричного ответа» зарубежным аналогам, не повторяя конвертоплан мод. V-22 «Osprey» (США) и его развитие тяжелый конвертоплан -проект QTR-четыре поворотных винта на концах двух тандемных крыльев, создать гамму ММВС и ТМВС. С целью минимизации затрат и сокращения сроков освоения четырехвинтового ММВС и восьмивинтового ТМВС целесообразно их производить по концепции ТРПВ-Х4 и ТРПВ-Х8 и на основе использования одного типоразмера мотогондол, созданных на базе ТВД мод. АИ-20Д, обеспечивающих при выполнении технологии ВВП их взлетный вес 20 и 40 т соответственно. Не исключено по четырехвинтовой концепции ТРПВ-Х4 освоение для труднодоступной местности также двух моделей поршневых ЛМВС, базирующихся на узловых ж/д станциях, охватывающих с радиусом их действия до 750 км и а/дороги, проводить и спасательные операции (ведь вертолетами по всей видимости вряд ли будет эффективнее). Кроме того, возможно применять поршневые ЛМВС и в качестве регионального аэротакси для коммерческой перевозки 3-5 и 5-8 человек с дальностью полета до 1575…2100 км.
Первоочередное освоение ММВС по концепции ТРПВ-Х4 с двумя ТВД мод. АИ-20Д позволит реализовать реально высокие технико-экономические результаты, позволяющие достойно конкурировать с ф. «Белл» и «Боинг» (США). Так, при стоимости их конвертоплана мод. V-22 «Osprey» $50-70 млн. такой ММВС будет в 2,0-3,0 раза дешевле. Причем ММВС при выполнении технологии ВВП, превосходя в пассажировместимости в 1,6 раза, будет развивать крейсерскую скорость, соответствующую числу М=0,6-0,7, и дальность полета по предварительным оценкам соответственно в 1,2 и 1,3 раза больше, чем у конвертоплана «Osprey», а при меньшей удельной нагрузке на крыло в 1,8 раза, будет иметь гораздо меньшие габариты в плане (в 1,4-1,6 раза меньше, чем для аналогичных по грузоподъемности конвертопланов двухвинтовой поперечной схемы). Последнее преимущество позволит широко использовать высокоскоростные ММВС на площадках ограниченного размера - на суше, авианесущих кораблях и вертолетоносцах, что исключительно важно при палубном и, особенно, городском базировании, в чем их главное и будущее предназначение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯЖЕЛЫЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ (ВАРИАНТЫ) | 2012 |
|
RU2492112C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| БЕСПИЛОТНЫЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2012 |
|
RU2502641C1 |
| МНОГОВИНТОВОЙ ГИБРИДНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2543120C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2013 |
|
RU2527248C1 |
| МНОГОВИНТОВОЙ ТЯЖЕЛЫЙ КОНВЕРТОВИНТОКРЫЛ | 2013 |
|
RU2521121C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С АРОЧНЫМ КРЫЛОМ | 2017 |
|
RU2648503C1 |
Изобретение относится к области авиационной техники, в частности к конструкции конвертопланов с поворотными винтами. Многоцелевой многовинтовой вертолет-самолет представляет собой высокорасположенный моноплан, содержащий двухкилевое оперение, фюзеляж, двигатели силовой установки, передающие мощность через систему соединительных валов трансмиссии на передний и задний редукторы, имеющие выходные поворотные валы соответственно с тянущим и толкающим винтами, обеспечивающими горизонтальную и при их отклонении вертикальную тягу, трехопорное убирающееся колесное шасси с носовой и главными боковыми опорами. Вертолет-самолет выполнен в виде многовинтовой преобразуемой модульной схемы, имеющей на крыле по меньшей мере две мотогондолы, каждая из которых имеет передний и задний винты, вынесенные за соответствующие кромки крыла. Трансмиссия, содержащая по два редуктора винтов, основному и промежуточному, для каждого двигателя, представляет собой Н-образную в плане конфигурацию. Трансмиссия обеспечивает привод всех винтов от одного работающего двигателя в случае отказа другого или при избыточной мощности силовой установки. Обеспечивается повышение надежности и безопасности полетов, устойчивости по крену, поперечной управляемости при переходных маневрах и висении. 2 ил.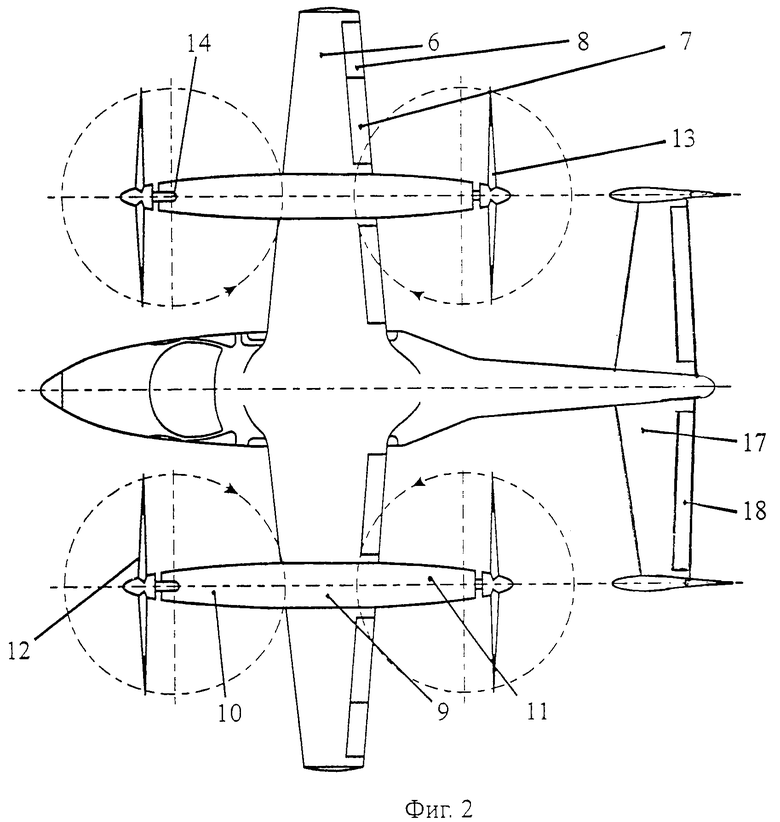
Многоцелевой многовинтовой вертолет-самолет, представляющий собой высокорасположенный моноплан, содержащий двухкилевое оперение, фюзеляж, двигатель силовой установки, передающий мощность через соединительные и синхронизирующий валы, расположенные по оси симметрии, на тянущий и толкающий поворотные винты, обеспечивающие горизонтальную и их отклонением от горизонтального положения соответственно вверх и вниз вертикальную тягу, трехопорное убирающееся колесное шасси, с носовой вспомогательной и главными боковыми опорами, отличающийся тем, что он выполнен по концепции тандемного расположения поворотных винтов на крыле и в виде конвертоплана модульной конструкции, имеющего на крыле по меньшей мере две мотогондолы, каждая из которых имеет переднюю и заднюю продолговатые, вынесенные за соответствующие кромки крыла надкрыльевые ее части, в передних и задних окончаниях которых смонтированы соответствующие поворотные винты, позволяющие обеспечивать возможность преобразования полетной его конфигурации с четырехвинтового самолета, имеющего в мотогондолах две двухвинтовые тандемные движительные системы, включающие два передних и два задних винта, горизонтальные оси поворотных валов которых, расположенные на одном уровне, смонтированы выше плоскости средней линии крыла, в четырехвинтовой вертолет, имеющий две расположенные тандемом двухвинтовые поперечные несущие схемы, включающие два передних и два задних винта, размещенных с соответствующим их вертикальным положением вдоль линий вертикальной их тяги соответственно перед и за крылом, смонтированным при максимально заднем расположении центра масс, и обратно, причем, компенсируя увеличение нагрузки на задние винты, обдуваемые передними винтами при переходных маневрах, и при висении, сохраняя равномерное распределение мощности силовой установки между передними и задним винтами одинакового диаметра и уменьшая нагрузку на задние винты, конструктивно в аэродинамической его компоновке центр масс между винтами размещен в плане со смещением на 1% к вертикальной оси передних винтов, трансмиссия, имеющая по два редуктора винтов, основному и промежуточному редукторам для каждого двигателя, представляющая собой Н-образную в плане конфигурацию и включающая наряду с продольными системами валов, расположенными вдоль продольной оси соответствующей мотогондолы и связывающими в каждой мотогондоле редукторы винтов с основным редуктором, приводимым через промежуточный редуктор отдельным двигателем, имеет поперечный синхронизирующий вал, расположенный в носке крыла, связывающий между собой двигатели через соответствующие Т-образные в плане промежуточные редукторы, обеспечивает привод всех винтов от одного двигателя в случае отказа другого или в крейсерском полете при избыточной мощности силовой установки.
| Соединительная муфта | 1981 |
|
SU962430A2 |
| Устройство для измерения граничных частот полосы пропускания четырехполюсника | 1975 |
|
SU666491A1 |
| US 6260793 B1, 17.07.2001 | |||
| ГИДРОКОНВЕРТОЭКРАНОПЛАН | 2004 |
|
RU2264951C1 |
| КОНВЕРТОПЛАН | 2004 |
|
RU2282566C2 |
| МНОГОЦЕЛЕВОЙ САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2005 |
|
RU2283795C1 |

