Изобретение относится к области авиационной техники и может быть использовано в конструкции беспилотных вертолетов-самолетов и высокоскоростных вертолетов-самолетов с поворотными винтами, применяющих технологии вертикального взлета и посадки, короткого взлета и посадки или короткого взлета и вертикальной посадки для наземного, корабельного и аэродромного или палубного базирования.
Известный многоцелевой беспилотный вертолет мод. Ка-13 7 ОКБ «им. Камова» (Россия), выполненный по двухвинтовой соосной схеме, имеет фюзеляж сферической формы без хвостового оперения и силовую установку, включающую поршневой двигатель, смонтированный в верхнем моторном отсеке фюзеляжа и передающий крутящий момент через главный редуктор и систему валов на соосные двухлопастные винты, шасси четырехстоечное рессорного типа для амортизационной посадки.
Признаки, совпадающие с предлагаемым изобретением: наличие поршневого двигателя и главного редуктора, передающего мощность на несущие винты, создающие вертикальную тягу, а соответствующие изменения общего шага и циклического шага винтов, обеспечивают перемещение вверх-вниз, вперед-назад, влево-вправо и в любой комбинации при его поступательном полете, вращение соосных винтов - синхронизирующее и противоположно направленное. Беспилотный вертолет мод. Ка-137 при взлетном весе 310 кг, имея целевую нагрузку 80 кг, способен перемещаться на высоте до 5000 м со скоростью до 175 км/ч, обеспечить время полета до 4 ч и дальность полета до 530 км, но и широко использоваться в многоцелевых беспилотных вертолетных комплексах, выполненных в трех исполнениях: наземно-мобильном, аэромобильном и корабельном.
Причины, препятствующие поставленной задаче: первая - это то, что беспилотный вертолет с движителем двухвинтовой соосной схемы имеет большой объем регламентных работ, малую весовую отдачу и радиус действия, а постоянные вибрации, возникающие при работе автоматов перекоса, создающие неблагоприятные условия для работы других механизмов и оборудования, весьма снижают разрешающую способность аэрофотосъемочной аппаратуры и особенно ТВ камеры; вторая - это то, что соосное расположение винтов создает вредную обдувку нижнего несущего винта верхним, усложняет схему редуцирования, а также значительно увеличивает массу редуктора и его высоту, что ограничивает возможности транспортирования; третья - это то, что в вертолете двухвинтовой соосной схемы с шарнирным креплением лопастей имеют место неблагоприятное взаимное влияние (индуктивные потери) соосных несущих винтов, которое в отдельных случаях может приводить и к их перехлесту.
Известен многоцелевой беспилотный вертолет мод. Boeing A160 «Hummingbird» (США), выполненный по одновинтовой схеме с четырехлопастным несущим и двухлопастным рулевым винтами, имеет силовую установку, включающую газотурбинный двигатель, передающий крутящий момент через главный редуктор и систему соединительных валов трансмиссии на несущий и хвостовой винты, вертикальное оперение, смонтированное под хвостовой балкой, оснащенное в носке килевой его поверхности амортизационной стойкой заднего колеса трехопорного колесного шасси, снабженного и главными убирающимися боковыми опорами с передними колесами.
Признаки, совпадающие с предлагаемым изобретением: наличие вертикального оперения и газотурбинного двигателя, главного редуктора и валов трансмиссии, передающих мощность четырехлопастному несущему и двухлопастному рулевому винтам, обеспечивающим перемещение вверх-вниз, вперед-назад, влево-вправо и в любой комбинации при его поступательном полете. Вращение несущего и рулевого винтов - синхронизирующее, взлетная тяговооруженность силовой установки, обеспечивающая максимальные скорости его полета до 260 км/ч и продолжительное время при висении, а также высоту полета до 6096 м и дальность полета до 4150 км. Многоцелевой беспилотный вертолет мод. Boeing A160 при взлетном весе 2950 кг, имея целевую нагрузку 860 кг, может применяться в беспилотных вертолетных комплексах для разведывательных и ударных операций с использованием управляемых ракет класса «воздух-поверхность» типа AGM-114 «Hellfire», а также обнаружения целей и ретрансляции разведданных.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет с движителем в виде несущего четырехлопастного винта, имеющего автомат перекоса, имеет большой объем регламентных работ и является дорогим в эксплуатации, но и малую весовую отдачу; вторая - это то, что силовая установка дорогостоящего беспилотного вертолета включает один газотурбинный двигатель и тем самым снижает надежность крейсерского полета при его отказе; третья - это то, что в вертолете одновинтовой схемы имеют место непроизводительные затраты до 10% мощности силовой установки на привод рулевого винта, необходимость хвостовой балки и агрегатов хвостовой трансмиссии, а также опасность, создаваемая рулевым винтом для наземного персонала; четвертая - это то, что вес рулевого винта вместе с хвостовой балкой и агрегатами хвостовой трансмиссии составляет до 15…20% веса пустого беспилотного вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Все это и ограничивает возможность дальнейшего повышения максимальной скорости полета и скороподъемности, а также показателей транспортной эффективности.
Наиболее близким к предлагаемому изобретению является многоцелевой дистанционно пилотируемой вертолет-самолет (Россия) [1], представляющий собой моноплан с цельноповоротным передним горизонтальным оперением, содержащий двухкилевое оперение, смонтированное к консолям крыла на гондолах, короткий фюзеляж, двигатель силовой установки, передающий крутящий момент через систему соединительных валов трансмиссии на носовой и хвостовой редукторы с передним и задним расположением выходного поворотного вала соответственно с тянущим и толкающим винтами, обеспечивающими горизонтальную и соответствующим отклонением вверх и вниз вертикальную тягу, трехопорное убирающееся колесное шасси с носовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие с прелагаемым изобретением наличие моноплана с передним горизонтальным оперением и среднерасположенным крылом, снабженным на гондолах разнесенным двухкилевым оперением и наплывами, образующие переменную стреловидность по передним их кромкам и объединяющие в единую конструкцию крыло и фюзеляж, представляющий собой в плоскости симметрии S-образный профиль. Поворотные (отклоняемые) винты, расположенные в передней и задней частях фюзеляжа, обеспечивающие горизонтальную тягу и соответствующим отклонением вверх и вниз от горизонтального положения вертикальную на угол 90° или наклонную тягу на угол 65° соответственно при вертикальном взлете и посадке или коротком взлете и посадке.
Причины, препятствующие поставленной задаче: первая - это то, что при вертикальном взлете-посадке увеличивается опасность, создаваемая задним (нижним) винтом для наземного персонала, а его однодвигательная силовая установка, снижая надежность крейсерского полета при его отказе, ограничивает взлетный его вес и с целью его увеличения предопределяет возможность только короткого взлета и посадки. Вторая - это то, что при переходных маневрах продольная устойчивость обеспечивается парой несущих поверхностей: передним горизонтальным оперением (ПГО) и крылом, что снижает стабильность управления из-за разных скоростей поворота при отклонении носового винта и цельноповоротного ПГО, т.к. срыв потока на последнем может происходить резко и быстро. Третья - это то, что при висении продольное расположение поворотных винтов изменяемого шага и с управлением циклического их шага значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автоматов их перекоса, создающие неблагоприятные условия для работы других механизмов и оборудования, весьма снижают разрешающую способность аэрофотосъемочной аппаратуры. Все это ограничивает увеличение продольной стабильности и управляемости, но и повышение наработки на отказ и безотказности.
Предлагаемым изобретением решается задача в указанном выше известном многоцелевом дистанционно пилотируемом вертолете-самолете значительного увеличения надежности и безопасности полетов, повышения наработки на отказ и безотказности, улучшения взлетно-посадочных характеристик при коротком взлете и посадке и повышения путевой устойчивости и устойчивости по крену, но и продольной стабильности и поперечной управляемости при переходных маневрах и висении.
Отличительными признаками предлагаемого изобретения от указанного выше известного многоцелевого дистанционно пилотируемого вертолета-самолета, наиболее близкого к нему, являются наличие того, что он снабжен цельноповоротным стабилизатором, имеющим возможность дифференциального отклонения его разнесенных консолей, смонтированных по внешним боковым поверхностям двухкилевого оперения, образующим продольную схему триплана, несущие поверхности которого расположены в продольной плоскости ступенчато, не затеняя друг друга, предыдущая поверхность размещена ниже последующей, а также возможностью синхронизации соответствующего поворота как корпуса поворотного вала с передним винтом носового редуктора и соответствующего отклонения цельноповоротного переднего горизонтального оперения, имеющего отрицательный угол поперечного V, так и корпуса поворотного вала с задним винтом хвостового редуктора и соответствующего отклонения на его крыле закрылков, при этом синхронизация обеспечивается в диапазоне их поворота как в момент, когда угол отклонения корпуса поворотного вала с передним винтом носового редуктора становится равновеликим от установочного угла атаки цельноповоротного переднего горизонтального оперения до допустимого угла атаки последнего, так и в момент, когда угол отклонения корпуса поворотного вала с задним винтом хвостового редуктора становится равновеликим от минимального до максимального угла отклонения на его крыле закрылков, но и обратно, носовой и хвостовой обтекатели фюзеляжа снабжены соответственно сверху от начала и снизу от конца раскрываемыми продольными проемами, имеющими направляющие для поворота корпуса поворотного вала с винтом соответствующего редуктора, каждая гондола сверху и под ее концом оснащена соответственно форкилем, имеющим до носка крыла аэродинамический гребень, и нижним отклоненным наружу килем, имеющим заднюю кромку, образующую V-образный излом в продольной плоскости с задней кромкой соответствующего вертикального оперения, трапециевидной формы нижние кили и вертикальные оперения, но и цельноповоротный стабилизатор снабжены соответственно скошенными назад, но и вовнутрь законцовками, концевые части крыла, смонтированные по внешним бортам гондол, оснащены на их законцовках гасящими вибрации грузы и выполнены с возможностью раздельного отклонения любой одной из них в вертикальной плоскости на положительные углы, позволяющие при соответствующем отклонении вверх одной из концевых частей среднерасположенного крыла, изменяя массовую симметрию, создавать момент крена (Mх) в сторону другой, не отклоненной концевой его части, трансмиссия, представляющая собой крестообразную в продольной плоскости конфигурацию и включающая наряду с носовым и хвостовым редукторами, обеспечивающими взаимно противоположное вращение переднего и заднего реверсивных винтов, имеет продольные валы, расположенные по обе стороны от плоскости симметрии и параллельно последней и снабженные угловыми редукторами в плане, обеспечивающими соответствующие перегибы к носовому и хвостовому редукторам и смонтированными соосно и входным поперечным валам с одной стороны последних и с противоположной механизму поворота корпуса соответствующего их выходного вала, образуют Г-образные в плане продольно-поперечные системы валов, связывающие носовой и хвостовой редукторы с главным редуктором, приводимым силовой установкой, включающей два газотурбинных двигателя, имеющих тандемное расположение и рассчитанных на работу при различных уровнях их размещения под и над главным редуктором, смонтированы соответственно от последнего к носовой и хвостовой частям фюзеляжа и выполнены для отбора их взлетной мощности соответственно с задним и передним выводом вала, каждый из последних оснащен угловым в продольной плоскости редуктором с вертикальным валом, обеспечивающим соответствующие вверх и вниз их перегибы к главному редуктору, оснащенному на его входных валах, образуя синхронизирующую систему валов, муфтами сцепления, выдающими, отключая от трансмиссии один любой из двигателей или оба, управляющий сигнал на автоматическое изменение полетной конфигурации соответственно в самолет или в вертолет с авторотирующими его несущими винтами. Бортовая система управления, включающая основную, оснащена и вспомогательной системой управления, обеспечивающей автоматический возврат его в точку взлета по активизированному маршруту, заносимому в ее оперативную память.
Благодаря наличию этих признаков это позволит при переходных маневрах повысить как путевую и устойчивость по крену, так и продольную стабильность и управляемость, а дублирование системы управления с автоматическим возвратом его в точку взлета по активизированному маршруту, автоматически заносимому в ее оперативную память, - надежность дорогостоящего беспилотного вертолета-самолета, оснащенного цельноповоротным стабилизатором, разнесенные дифференциально отклоняемые консоли которого смонтированы по внешним боковым поверхностям двухкилевого оперения, снабжен возможностью при соответствующем повороте корпуса поворотного вала с передним винтом носового редуктора и синхронного соответствующего поворота цельноповоротного ПГО. Это позволит, образуя продольную схему триплана, использовать систему продольной устойчивости взаимодействием трех поверхностей, расположенных в продольной плоскости ступенчато так, что, не затеняя друг друга, предыдущая поверхность размещена ниже последующей. При этом пара поверхностей: цельноповоротное ПГО - крыло обеспечивают 75% необходимой устойчивости, а остальные 25% дополняются разнесенным цельноповоротным стабилизатором. Это позволит, программируя опережающий срыв потока на цельноповоротном ПГО, чем на крыле, уменьшить продольную дестабилизацию. Это достигается тем, что установочный угол такого ПГО, имеющего отрицательный угол поперечного V, устанавливается больше на 3…6о установочного угла атаки крыла. При этом срыв потока будет происходить постепенно и медленно, не переходя в пикирование. В противном случае, если срыв потока на крыле происходит раньше, чем на таком ПГО, то происходит резкое кабрирование и при таком «подхвате» теряется скорость и падение неизбежно. Концевые части крыла, смонтированные по внешним бортам гондол, выполнены с возможностью раздельного отклонения любой одной из них в вертикальной плоскости на некоторые положительные углы, позволяющие при соответствующем отклонении вверх одной из концевых частей крыла, изменяя массовую симметрию, создавать момент крена (Mх) в сторону другой не отклоненной концевой части. Это позволит при висении изменять поперечную балансировку при одновременном соответствующем изменении шага переднего винта, обеспечивающего при этом продольную стабилизацию в связи с изменяемой продольной балансировкой. Трансмиссия представляет собой крестообразную в продольной плоскости конфигурацию, включает наряду с носовым и хвостовым редукторами, обеспечивающими взаимно противоположное вращение переднего и заднего винтов, и оснащена двумя Г-образными в плане продольно-поперечными системами валов, первые части которых расположены по обе стороны от плоскости симметрии, связывающими носовой и хвостовой редукторы с главным редуктором, приводимым двумя газотурбинными двигателями, имеющими тандемно-ярусное расположение и смонтированными под и над главным редуктором, оснащенным на его входах муфтами сцепления, выдающими, отключая один любой из двигателей или оба, управляющий сигнал на автоматическое изменение полетной конфигурации соответственно в самолет или в вертолет с авторотирующими его несущими винтами. Это позволит повысить безопасность полетов и использовать газотурбинные двигатели меньших габаритов в их поперечнике, что обеспечит уменьшение как миделя фюзеляжа, так ширину носового и хвостового обтекателей и предопределит меньшее затенение поворотных винтов при вертикальном взлете, посадке и висении. Кроме того, при висении, максимально отклоняя вверх цельноповоротное ПГО и вниз закрылки крыла, это позволит уменьшить на 7% потери вертикальной тяги винтов. В крейсерском полете, используя один из двух двигателей, это позволит увеличить наработку на отказ двигателей, повысить безотказность.
Предлагаемое изобретение многоцелевого беспилотного вертолета-самолета (БПВС) и варианты его использования представлены на фиг.1 и 2.
На фиг.1 изображен многоцелевой БПВС в вертолетоподобной полетной конфигурации, общий вид сбоку, с расположением поворотных винтов в двухвинтовой продольной схеме на режимах его вертикального взлета, посадки и висения.
На фиг.2 изображен многоцелевой БПВС в полетной конфигурации самолета, общий вид сверху, с тандемным расположением поворотных винтов переднего и заднего в двухвинтовой движительной системе на крейсерских режимах его полета.
Многоцелевой беспилотный вертолет-самолет, выполненный по продольной схеме триплана блочно-модульной конструкции и представленный на фиг.1 и 2, содержит фюзеляж 1, имеющий удобообтекаемую S-образную форму в плоскости симметрии с подфюзеляжным и боковыми воздухозаборниками соответственно переднего и заднего двигателей. Среднерасположенное крыло 2, имеющее впереди его наплывы 3 с переменной стреловидностью, плавно переходящие в концевые части 4 крыла 2 и объединяющие фюзеляж 1 и крыло 2 в единую плавно образованную конструкцию (см. фиг.2). Перед наплывами 3 смонтировано с отрицательным углом поперечного V цельноповоротное переднее горизонтальное оперение (ЦПГО) 5. Гондолы 6 соединяют крыло 2 с двухкилевым оперением 7, имеющим рули направления 8. Трапециевидное крыло 2 со стреловидностью по передней кромке, оснащенное закрылками 9 по всему размаху, снабжено раздельно отклоняемыми (для поперечного управления при висении) концевыми частями 4, имеющими на их законцовках гасящие вибрации грузы 10 - контейнеры систем радиоэлектронной борьбы (РЭБ) или топливные баки. Разнесенные дифференциально отклоняемые консоли цельноповоротного стабилизатора (ЦПС) 11 смонтированы по внешним боковым поверхностям двухкиливого оперения 7. При этом консоли ЦПС 11 и концевые части 4 крыла 2 выполнены отклоняющимися вверх для удобства размещения на палубе (ангаре) и с возможностью эксплуатации на кораблях. Силовая установка (СУ), расположенная в центральной части фюзеляжа 1, смонтирована в моторном отсеке, который изолирован от других противопожарными перегородками, имеет газотурбинные двигатели (ГТД), установленные с максимальной их простотой обслуживания и эксплуатации. Мощность от ГТД передается поворотным винтам посредством системы трансмиссии, связанной с носовым и хвостовым редукторами. Выходной вал первого снабжен возможностью его поворота с передним винтом 12 относительно оси редуктора вверх от горизонтального положения вдоль плоскости симметрии, а выходной вал второго редуктора с задним винтом 13 - вниз синхронно первому (см. фиг.1). При этом реверсивные винты 12 и 13, выполненные с жестким креплением угле- и стеклопластиковых лопастей и возможностью изменения углов их установки, смонтированы в носовом и хвостовом обтекателях 14, имеющих соответственно сверху от начала и снизу от конца раскрываемые продольные проемы 15, снабженные направляющими для поворота корпуса поворотного вала с винтом соответствующего редуктора. Поворот трехлопастных винтов 12 и 13, преобразующих его полетную конфигурацию с вертолета двухвинтовой продольной схемы в самолет с тандемным расположением винтов, осуществляется с помощью электромеханических приводов. Трансмиссия представляет собой крестообразную в продольной плоскости конфигурацию, наряду с носовым и хвостовым редукторами, расположенными в соответствующих обтекателях 14 фюзеляжа 1, оснащена двумя Г-образными в плане продольно-поперечными системами валов, первые части которых расположены по обе стороны от плоскости симметрии, связывающими носовой и хвостовой редукторы с главным редуктором, приводимым двумя ГТД. При этом двигатели, имея тандемно-ярусное расположение, размещены под и над главным редуктором, смонтированы соответственно от последнего к носовой и хвостовой частям фюзеляжа 1 и выполнены для отбора взлетной их мощности соответственно с задним и передним выводами вала. Каждый из последних оснащен угловым в продольной плоскости редуктором, обеспечивающим с синхронизирующей вертикальной системой валов соответствующие вверх и вниз их перегибы к входным валам главного редуктора. Избыточная тяговооруженность СУ, обеспечивающая вертикальный взлет, посадку и висение, предопределяет в крейсерском полете муфтами сцепления отключение любого избыточного ГТД или одного из них при отказе (на фиг.1 и 2 не показаны). В случае отказа двух двигателей СУ возможна автоматическая посадка в конфигурации вертолета на режиме авторотации его несущих винтов 12 и 13. Каждая гондола 6 сверху и под ее концом оснащена соответственно форкилем 16, имеющим до носка крыла 2 аэродинамический гребень, и нижним, повышая путевую и устойчивость по крену, отклоненным наружу килем 17. Трапециевидной формы и нижние кили 17, и вертикальные оперения 7, но и консоли ЦПС 11 снабжены, исключая гасящие вибрации грузы, скошенными соответственно назад, но и вовнутрь законцовками. На гондолах 6, продленных от носка крыла 2 и за заднюю его кромку, смонтировано двухкилевое оперение 7 с нижними килями 17, которые, закрывая полностью по бокам задний винт 13, уменьшают опасность для обслуживающего персонала. В передних окончаниях каждой гондолы 6, имеющей в нижней части отсек для опоры главного шасси, смонтированы две ТВ камеры 18 переднего обзора. Для размещения целевой нагрузки - оптико-электронной, радиотехнической и разведывательной аппаратуры (для видовой разведки, телевизионного и инфракрасного наблюдения местности в реальном масштабе времени), а также широкополосного передатчика с антенной для передачи изображения по телевизионному радиоканалу предусмотрен в фюзеляже 1 отсек 19. Причем в состав данного оборудования могут входить автоматический радиопеленгатор, автопилот и системы РЭБ с пассивными и активными средствами. При этом дальность связи может составлять по радиоканалу закрытой связи и прямой радиовидимости на удалении от базовой автоматизированной станции до 540 км при высоте его полета не ниже 12500 м, а по спутниковому или мобильному каналу - в зоне их действия. Трехопорное убирающееся шасси, носовая опора с колесом 20 убирается в отсек подфюзеляжного воздухозаборника 21 переднего ГТД, главные боковые опоры с колесами 22 - в отсеки разнесенных гондол 6.
Управление многоцелевым БПВС обеспечивается общим и дифференциальным изменением шага поворотных винтов переднего 12 и заднего 13 и отклонением концевых частей 4 крыла 2 и рулевых поверхностей 5, 8 и 11, работающих в зоне активного обдува этих винтов. При крейсерском полете подъемная сила создается крылом 2 и ЦПГО 5, горизонтальная тяга - винтами 12 и 13, на режиме висения только винтами 12 и 13, на режиме перехода - крылом 2, ЦПГО 5 и винтами 12 и 13. При переходе к вертикальному взлету-посадке (висению) раскрываются проемы 15 и затем ЦПГО 5 и закрылки 9 отклоняются на максимальные их углы синхронно с поворотов винтов 12 и 13 вдоль плоскости симметрии от горизонтального положения, отклоняясь соответственно вверх и вниз, устанавливаются вертикально (см. фиг.1). При переходе с самолетного режима полета на режим висения и если возникает момент тангажа (Mz), то он парируется отклонением консолей ЦПС 11, создающих, работая в зоне вихрей от обдува наплывов 3, парирующую силу. После установки поворотных винтов переднего 12 и заднего 13 в вертикальное положение вдоль линий вертикальной их тяги осуществляется возможность вертолетных режимов полета. С приближением к поверхности земли (палубы корабля) и полете вблизи них винты 12 и 13, имея взаимно противоположное их вращение, образуют под БПВС область уплотненного воздуха, создающего эффект воздушной подушки, и тем самым повышают их эффективность. Поворотные реверсивные винты 12 и 13 отклоняются от горизонтального положения вверх и вниз на угол 90° и 65° соответственно при вертикальном взлете (посадке) и взлете с коротким разбегом (посадке с коротким пробегом) БПВС на вертолетных и самолетных режимах его полета. Для соответствующей посадки БПВС на поверхность земли (палубы корабля) используются колеса 20 и 22 убирающегося шасси.
При висении на вертолетных режимах полета продольное управление БПВС осуществляется как у вертолета продольной схемы изменением шага винтов переднего 12 и заднего 13, путевое управление - изменением крутящих моментов этих винтов. Поперечное управление обеспечивается соответствующим отклонением вверх одной из концевых частей 4 (продольная схема триплана, уменьшая продольную его дестабилизацию, в полной мере этому способствует), изменяя массовую симметрию, создает момент крена (Mх) в сторону другой не отклоненной концевой части 4 крыла 2, изменяющий поперечную балансировку при висении. Отсутствие при висении перекрытия переднего 12 и заднего 13 винтов также значительно снижает вредное взаимовлияние и повышает их заполнение, что, в свою очередь, значительно уменьшает проблему срыва потока. После вертикального взлета и набора высоты для перехода на самолетный режим полета два поворотных винта 12 и 13 синхронно устанавливаются в горизонтальное положение (см. фиг.2). После чего закрываются проемы 15 и производится крейсерский полет, при котором путевое управление обеспечивается рулями направления 8. Продольное или поперечное управление может осуществляться ЦПГО 5, симметричным или дифференциальным отклонением консолей ЦПС 11 соответственно. На самолетных режимах полета БПВС при создании горизонтальной тяги его передний винт 12 имеет взаимно противоположное вращение с задним винтом 13 и тем самым весьма повышает эффективность винтомоторной группы. При его полетной вертолетоподобной конфигурации двухвинтовой продольной схемы реактивные моменты от поворотных винтов 12 и 13, используемых как несущие винты, компенсируются полностью за счет также взаимно противоположного их вращения.
Таким образом, многоцелевой БПВС, выполненный по продольной схеме триплана с передним и задним поворотными винтами, двухкилевым оперением и разнесенными консолями цельноповоротного стабилизатора, представляет собой беспилотный конвертоплан. При этом поворотные реверсивные винты с жестким креплением лопастей, создающие вертикальную и соответствующим отклонением горизонтальную тягу, обеспечивают как необходимые управляющие моменты, так и уменьшение дистанции при посадке с пробегом. Причем ЦПГО находится впереди крыла и создает дополнительную подъемную силу и разгружает его, что и предопределяет наравне с высокой тяговооруженностью СУ БПВС возможность легко реализовать как вертикальный взлет и посадку (ВВП), так и короткий взлет и вертикальную посадку (КВВП). Последнее весьма важно при палубном базировании, т.к. обеспечивает короткий взлет (достаточно и 60…70 м) с максимальным его весом и вертикальную его посадку (на площадку 11×15 м) пустого на палубу авианесущего корабля (АНК).
Поскольку из-за сложности реализации палубного базирования беспилотных реактивных самолетов, например мод. «Х-45А» фирмы «Boeing» (США), то, по-прежнему, за рубежом широко проводятся исследования по оптимизации возможности преобразования полетной конфигурации беспилотных конвертопланов, которые зачастую могут основываться на использовании концепции продольной схемы триплана и тандемного расположения поворотных реверсивных винтов, смонтированных в носовой и хвостовой частях фюзеляжа. Поэтому именно турбовинтовые БПВС могут обеспечить необходимые и достаточно повышенные боевые свойства. Повышение боевой мощи таких БПВС достигается за счет сверхманевренности, повышения скорости и массы боевой нагрузки, но и способности решения как истребительных, так и разведывательно-ударных задач, а также обнаружения целей и ретрансляции разведданных. Повышение выживаемости БПВС может быть реализовано за счет существенного снижения его заметности, обеспечения кругового помехового поля и огневого поражения средств ПВО, а также за счет реализации трех безусловных «будь»: будь на постоянной связи, будь автоматически (по заданной программе) и дистанционно управляемым и будь автоматически (по активизированному маршруту) возвращаемым. Повышение мобильности и применимости турбовинтовых БПВС может обеспечиваться за счет реализации режима большой дозвуковой скорости и их наземного, корабельного и аэродромного или палубного базирования. Причем наиболее актуальным для этих целей может стать первоочередное освоение легкого БПВС с турбовинтовыми двигателями мод. СТ7-9 В, обеспечивающего с использованием технологии ВВП и КВВП дальность полета 3300 и 4950 км при целевой нагрузке 1350 и 2700 кг соответственно. При этом высота его полета при максимальных скоростях, соответствующих числу М=0,8, может составить до 12500 м. Поэтому многофункциональные возможности турбовинтовых БПВС должны и предопределить их широкое использование в составе беспилотных вертолетно-самолетных комплексов наземного и корабельного исполнений. Это позволит перейти как к концепции армейской авиации ВВП, так и к концепции освоения средних малозаметных АПК и вертолетоносцев, но и реализовать совместное боевое их применение с пилотируемыми вертолетами-самолетами, что может являться безусловным противотанковым и противокорабельным винтокрылым приоритетом сухопутных войск и военно-морских сил.
Литература
1. Дуров Д.С. Многоцелевой дистанционно пилотируемый вертолет-самолет (Патент РФ №2008105144), 11.02.2008 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| БЕСПИЛОТНЫЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2012 |
|
RU2502641C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| МНОГОЦЕЛЕВОЙ ГИДРОКОНВЕРТОВИНТОПЛАН | 2007 |
|
RU2351506C2 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2448869C1 |
| БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2013 |
|
RU2527248C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| ТЯЖЕЛЫЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ (ВАРИАНТЫ) | 2012 |
|
RU2492112C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОВИНТОКРЫЛ | 2009 |
|
RU2432300C2 |

Изобретение относится к области авиационной техники, в частности к беспилотным летательным аппаратам. Высокоскоростной беспилотный вертолет-самолет представляет собой моноплан с цельноповоротным передним горизонтальным оперением, двухкилевым вертикальным оперением, смонтированным к консолям крыла, крепящимся к гондолам, цельноповоротным стабилизатором, форкилями над гондолами и под ними. Цельноповоротный стабилизатор имеет возможность дифференцированного отклонения разнесенных консолей. Несущие поверхности расположены в продольной плоскости, не затеняя друг друга, образуя продольную схему триплана. Крутящий момент от двигательной установки, состоящей из двух газотурбинных двигателей, установленных тандемно, через трансмиссию передается на тянущий и толкающий винты, которые обеспечивают горизонтальную и соответствующим отклонением вверх и вниз вертикальную тягу. Трансмиссия летательного аппарата состоит из главного редуктора, носового и хвостового редукторов, продольных валов, расположенных по обе стороны от плоскости симметрии и параллельно ей и снабженных угловыми редукторами, Трансмиссия имеет крестообразную в продольной плоскости конфигурацию. Носовой и хвостовой обтекатели снабжены соответственно сверху и снизу раскрываемыми продольными проемами, имеющими направляющие для поворота корпуса поворотного вала с винтом соответствующего редуктора. Достигается повышение устойчивости и управляемости летательного аппарата. 2 ил.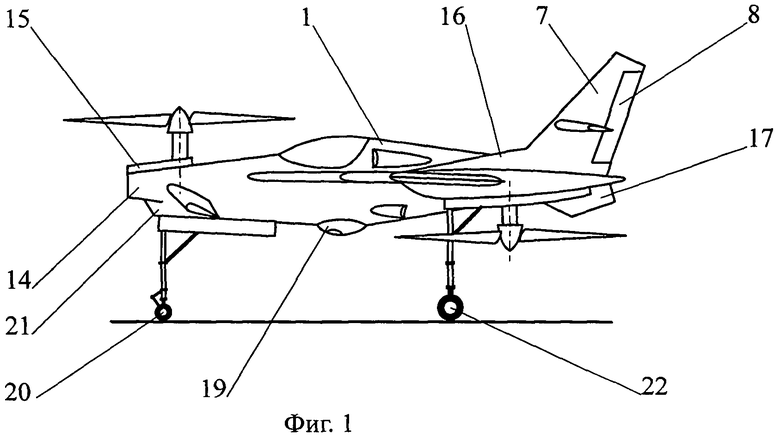
Высокоскоростной беспилотный вертолет-самолет, представляющий собой моноплан с цельноповоротным передним горизонтальным оперением, содержащий двухкилевое оперение, смонтированное к консолям крыла на гондолах, короткий фюзеляж, трансмиссию, включающую главный редуктор с соединительными валами, передающими крутящий момент от двигателя силовой установки на носовой и хвостовой редукторы с передним и задним расположением выходных поворотных валов соответственно с тянущим и толкающим винтами, обеспечивающими горизонтальную и соответствующим отклонением вверх и вниз вертикальную тягу, трехопорное убирающееся колесное шасси с носовой вспомогательной и главными боковыми опорами, отличающийся тем, что он снабжен цельноповоротным стабилизатором, имеющим возможность дифференцированного отклонения его разнесенных консолей, смонтированных по внешним боковым поверхностям двухкилевого оперения, образующим продольную схему триплана, несущие поверхности которого расположены в продольной плоскости ступенчато, не затеняя друг друга, предыдущая поверхность размещена ниже последующей, а также возможностью синхронизации соответствующего поворота, как корпуса поворотного вала с передним винтом носового редуктора и соответствующего отклонения цельноповоротного переднего горизонтального оперения, имеющего отрицательный угол поперечного V, так и корпуса поворотного вала с задним винтом хвостового редуктора и соответствующего отклонения на крыле закрылков, при этом синхронизация обеспечивается в диапазоне их поворота как в момент, когда угол отклонения корпуса поворотного вала с передним винтом носового редуктора становится равновеликим от установочного угла атаки цельноповоротного переднего горизонтального оперения до допустимого угла атаки последнего, так и в момент, когда угол отклонения корпуса поворотного вала с задним винтом хвостового редуктора становится равновеликим от минимального до максимального угла отклонения на крыле закрылков, но и обратно; носовой и хвостовой обтекатели фюзеляжа снабжены соответственно сверху от начала и снизу от конца раскрываемыми продольными проемами, имеющими направляющие для поворота корпуса поворотного вала с винтом соответствующего редуктора; каждая гондола сверху и под ее концом оснащена соответственно форкилем, имеющим до носка крыла аэродинамический гребень, и нижним отклоненным наружу килем, имеющим заднюю кромку, образующую V-образный излом в продольной плоскости с задней кромкой соответствующего вертикального оперения, трапециевидной формы нижние кили и вертикальные оперения и цельноповоротный стабилизатор снабжены соответственно скошенными назад, но и вовнутрь законцовками, концевые части крыла, смонтированные по внешним бортам гондол, оснащены на их законцовках гасящими вибрации грузами и выполнены с возможностью раздельного отклонения любой одной из них в вертикальной плоскости на положительные углы, позволяющие при соответствующем отклонении вверх одной из концевых частей среднерасположенного крыла, изменяя массовую симметрию, создавать момент крена (Мx) в сторону другой, не отклоненной концевой его части; трансмиссия, представляющая собой крестообразную в продольной плоскости конфигурацию и включающая наряду с носовым и хвостовым редукторами, обеспечивающими взаимно противоположное вращение переднего и заднего реверсивных винтов, продольные валы, расположенные по обе стороны от плоскости симметрии и параллельно последней и снабженные угловыми редукторами в плане, обеспечивающими соответствующие перегибы к носовому и хвостовому редукторам и смонтированными соосно входным поперечным валам с одной стороны последних и с противоположной механизму поворота корпуса соответствующего их выходного вала, образуют Г-образные в плане продольно-поперечные системы валов, связывающие носовой и хвостовой редукторы с главным редуктором, приводимым силовой установкой, включающей два газотурбинных двигателя, имеющих тандемное расположение и рассчитанных на работу при различных уровнях их размещения под и над главным редуктором, смонтированы соответственно от последнего к носовой и хвостовой частям фюзеляжа и выполнены для отбора их взлетной мощности соответственно с задним и передним выводами вала, каждый из последних оснащен угловым в продольной плоскости редуктором с вертикальным валом, обеспечивающим соответствующие вверх и вниз их перегибы к главному редуктору, оснащенному на его входных валах, образуя синхронизирующую систему валов, муфтами сцепления, выдающими, отключая от трансмиссии один любой из двигателей или оба, управляющий сигнал на автоматическое изменение полетной конфигурации соответственно в самолет или в вертолет с авторотирующими его несущими винтами; бортовая система управления, включающая основную, оснащена вспомогательной системой управления, обеспечивающей автоматический возврат его в точку взлета по активизированному маршруту, заносимому в ее оперативную память.
| МНОГОЦЕЛЕВОЙ ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2008 |
|
RU2370414C1 |
| US 6260793 B1, 17.07.2001 | |||
| Способ выращивания ортомиксовирусов | 1981 |
|
SU1081208A1 |
| Летательный аппарат | 1978 |
|
SU1153821A3 |
| КОНВЕРТОПЛАН | 2004 |
|
RU2282566C2 |

