Изобретение относится к способу и устройству/системе для моделирования электрической нагрузки подшипника для подшипника электрической машины.
В подшипниках электрических машин, например электрическом генераторе или электродвигателе, вследствие электростатического заряда или при питании посредством мощного электронного исполнительного элемента может возникнуть нежелательное протекание тока. В случае этих токов подшипников речь идет отчасти о так называемых EDM (электроэрозионная обработка) - токах, при которых в подшипнике возникают электродуговые разряды. Особенно в смазочной пленке, которая находится между телами качения и вращающимися кольцами соответствующего подшипника, происходят пробои и разряды. Ввиду этого может иметь место преждевременное истирание смазочного средства и подшипника. Преждевременный отказ подшипника также является возможным следствием.
Задачей настоящего изобретения является предложить способ и устройство для моделирования тока подшипника или электрической нагрузки подшипника.
Решение этой задачи достигается, например, способом или системой согласно любому из пунктов 1-12 формулы изобретения.
Токи подшипника могут в электрических машинах вновь и вновь приводить к проблемам. В двигателях с питанием от сети возникают токи подшипника, которые являются результатом, например:
- несимметричности в магнитном контуре,
- технологических допусков и/или
- анизотропии материалов.
Они создают проблемы прежде всего при больших машинах в синусоидальной сети.
Асимметричное распределение магнитного потока в двигателе индуцирует напряжение в валу, которое обуславливает то, что низкочастотный ток протекает через подшипник. Эти токи подшипника циркулируют в замкнутом контуре: вал - подшипник - подшипниковый щит - корпус.
Этот недостаток устраняется, например, посредством прерывания протекания тока. Изоляция подшипника рациональным образом на стороне обслуживания может обеспечить решение этой проблемы.
Кроме того, токи подшипника также возникают из-за питания от преобразователя переменного тока (инвертора). Основой являются при этом, например, выпрямители тока с промежуточным контуром напряжения. В двигателях с питанием от инвертора возникают паразитные эффекты, которые могут проявляться посредством протекания тока через подшипник двигателя. Электродуговые разряды через смазочную пленку подшипника могут приводить к расплавлению материала в дорожках качения подшипника. Эти изменения могут в экстремальных случаях приводить к полному выходу из строя подшипниковой опоры.
Во избежание вредного тока подшипника в приводах трехфазного тока с питанием с использованием силовых электронных устройств применяются заземляющие щетки между ротором и корпусом. Тем самым достигается заземление ротора. В общем случае щетки заземления испытывают износ, так что затраты на обслуживание и поддержание в исправном состоянии повышаются. Кроме того, надежность контакта щеток заземления, особенно в неблагоприятных условиях окружающей среды, не всегда обеспечивается, что может приводить к возникновению токов подшипников и повышенному износу подшипников. Во избежание тока подшипника также возможны другие различные меры поддержки, как, например, исключение или минимизация повреждения подшипников, поддержка для аппаратных средств (другие кабели, лучшее заземление, выравнивание потенциала в системе, щетки заземления, фильтрация синфазных помех).
Для того чтобы увеличить срок службы подшипника, могут приниматься и другие меры. Например, может измеряться существующее на электрической машине электрическое напряжение, причем из результата измерения напряжения определяется напряжение синфазного сигнала, причем на основе напряжения синфазного сигнала определяется компенсационное напряжение и компонент электрической машины, который электрически соединен с подшипником, нагружается компенсационным напряжением, так что падающее на подшипнике напряжение подшипника по меньшей мере частично компенсируется.
Токи подшипника могут, таким образом, подавляться в зависимости от рабочей точки или от установки, то есть, в частности, в зависимости от состояния. Приложение компенсационного напряжения, определенного, в частности, на основе определения состояния, к подшипнику приводит к существенной компенсации напряжений подшипника, которые в противном случае при слишком больших значениях вызвали бы электродуговые разряды и, тем самым, токи подшипника. Остаточные напряжения подшипника слишком низки, чтобы вызывать электродуговые разряды в наносящей ущерб мере. В идеальном случае измеренные напряжения подшипников, ввиду компенсации, пропадают полностью.
Также можно определять существующее на подшипнике напряжение подшипника или ток подшипника, протекающий через подшипник, и совместно учитывать при определении компенсационного напряжения. Тем самым можно дополнительно улучшить качество компенсации.
В противоположность синфазному напряжению, которое представляет косвенный показатель, ток подшипника и напряжение подшипника являются прямыми показателями, которые обеспечивают возможность непосредственного контроля условий в соответствующем подшипнике. Определение и, в частности, обратная связь по этим прямым показателям обеспечивают возможность очень быстрой реакции на изменения состояния в подшипнике.
При оценке и/или компенсации токов подшипника имеет значение то, что состояние соответствующего подшипника известно. Посредством измерения токов заземления, токов вала и напряжений вала можно пытаться выполнить электрическое описание состояния подшипника двигателя. Тем самым можно косвенным образом в свою очередь получить выводы о протекании тока в подшипнике.
Посредством применения внешних измеренных значений (например, токов заземления, клеммного напряжения, напряжения вала (напряжения подшипника), температуры подшипника, колебания, числа оборотов, непрямых токов подшипника через шунтирование изоляцией, крутизны напряжения, частоты импульсов и т.д.) можно на основе имитационной модели вычислить внутренние измеряемые значения (величины зазора для смазки подшипника, емкость подшипника токи подшипника и т.д.). Кроме того, является возможным посредством комбинации внутренних и внешних значений вычислить так называемые параметры процесса, такие как, например:
- частотность пиков тока подшипника;
- частотность пиков напряжения;
- частотность значений крутизны напряжения;
- формирование отношения текущей частотности к приведению в действие установки;
- разделение в классы частотности и вычисление повышения на интервале времени дельта Т;
- вычисление энергии, передаваемой через зазор для смазки подшипника из произведения измеренного напряжения подшипника и вычисленного тока подшипника посредством интегрирования по времени; и/или
- состояние подшипника.
Также возможна оценка передаваемой через зазор для смазки подшипника энергии или плотности мощности. Тем самым обеспечивается возможность оценки срока службы подшипника.
В способе определения состояния подшипника для подшипника электрической машины посредством сенсорного блока определяется измеренное значение. Сенсорный блок является, например, следующим:
- датчиком тока;
- датчиком напряжения;
- датчиком Холла;
- суммой всех датчиков или множества датчиков, которые размещены на или вокруг подшипниковой опоры двигателя (датчики температуры, датчики колебания, щетки для измерения напряжения подшипника и т.д.);
- измерителем напряжения в клеммовой коробке двигателя;
- преобразователем тока около линий заземления и силовых линий или вала и/или
- тому подобным.
Измеренное значение является, например, аналоговым измеренным значением или цифровым измеренным значением тока или напряжения.
Измеренное значение или множество измеренных значений передается на блок моделирования. Блок моделирования может, например, быть инвертором (при вычисленных значениях) или сенсорным/управляющим блоком (например, системой мониторинга состояния CIPLUS CMS), процессором, находящимся на двигателе, и т.д. Посредством блока моделирования может определяться результирующее значение. Результирующее значение представляет собой, например, значение тока подшипника или значение, зависимое от тока подшипника. Результирующее значение может передаваться на другой блок. Результирующее значение является, например, также графическим представлением, сообщением тревоги, предупредительным сообщением и/или светофороподобным представлением вышеназванных значений, таких как величина зазора для смазки подшипника, емкость подшипника, ток подшипника, частотность пиков тока подшипника, частотность пиков напряжения и т.д.
Дополнительным блоком является, например, блок оценки, причем посредством блока оценки результирующее значение обрабатывается таким образом, что определяется значение состояния подшипника. Блок оценки может, например, быть реализован аппаратными средствами и/или программным обеспечением. Также блок моделирования может быть реализован аппаратными средствами и/или программным обеспечением.
Блок моделирования и блок оценки могут быть реализованы одним и тем же аппаратным блоком, так что моделирование и оценка осуществляются, например, на одном и том же процессорном блоке.
Также, например, возможно, что вычисление результирующих значений и/или значений состояния подшипника может осуществляться на встроенном управляющем компьютере. Встроенный управляющий компьютер имеет для этого имитационную модель, посредством которой осуществляется вычисление параметров. Встроенный управляющий компьютер является, например, системой управления с программируемой памятью (SPS), компьютерным числовым управлением (CNC), регулируемым выпрямителем тока и т.п. Также может выполняться комбинация из сенсоров и блока оценки/моделирования в системе мониторинга состояния.
Блок оценки или блок моделирования имеет, например, устройство отображения на экране, устройство вывода индикации на экран, причем на устройстве вывода индикации на экран, в частности, представляется результирующее значение. Возможен также вывод данных в форме графика или значения посредством принтера, акустического и/или визуального сообщения, светофора (трехцветного представления) и т.п. Кроме того, может также представляться значение состояние подшипника. В одной форме выполнения устройства вывода индикации на экран оно имеет указатель (цифровой или механический), посредством которого может представляться значение. Если индицируемое значение превышает пороговое значение, то в одной форме выполнения устройства вывода индикации может индицироваться предупреждение.
В одной форме выполнения способа измеренные значения обрабатываются в блоке моделирования и/или блоке оценки в реальном времени. При этом результирующие значения и/или значения состояния подшипника могут представляться человеку, то есть оператору, в реальном времени. Реальное время означает, что обработка или представление осуществляется актуальным образом. Сдвиг по времени может возникать ввиду, например, времени вычисления или времени передачи данных.
В одной форме выполнения способа результирующие значения или значения, зависимые от результирующих значений, сохраняются вместе со значением состояния выпрямителя тока. Значения состояния выпрямителя тока, который питает электрическую машину (электрический двигатель), подшипник которой контролируется, являются, например, следующими:
- напряжение промежуточного контура,
- максимальный ток,
- максимальное напряжение,
- текущая мощность,
- импульсный образец,
- импульсная частота,
- момент времени переключения импульсного образца и т.д.
Для выполнения способа могут использоваться различные системы для определения состояния подшипника электрической машины.
Подобная система для определения состояния подшипника для подшипника электрической машины имеет, например, блок моделирования, сенсорный блок и/или блок оценки, причем блок моделирования предусмотрен для обработки данных сенсорного блока, и причем блок оценки предусмотрен для обработки данных блока моделирования.
В одной форме выполнения системы блок моделирования имеет модель для моделирования подшипника. Модель может, например, служить для вычисления вызывающей образование кратеров (точечных повреждений) энергии для рассматриваемого подшипника.
В одной форме выполнения системы блок моделирования имеет имитационную модель для вычисления зазора для смазки подшипника, емкости подшипника и/или тока подшипника из параметров машины и внешних измеренных значений. Параметрами машины являются, например, геометрические размеры двигателя, пазы, изоляция, длины, числа пазов и т.д. Из них вычисляются емкости рассеяния двигателя, и создается имитационная модель. При этом может применяться емкостная эквивалентная схема двигателя как часть модели.
Точное описание состояния подшипника(ов) посредством имитационной модели может также предоставить выводы о состояниях износа подшипников двигателя и/или пластичной смазки подшипников. При оценке остаточного срока службы конечный пользователь может точнее планировать свои интервалы технического обслуживания и, тем самым, предотвращать незапланированные отказы.
Постоянная времени разряда и энергия разряда зависят от толщины смазочной пленки в подшипнике. Предварительно может, например, приниматься характеристическая кривая относительно того, какие толщины смазочной пленки приводят к каким постоянным времени и электрическим емкостям. Вместе с коэффициентом напряжения подшипника (BVR) и синфазным напряжением инвертора отсюда может быть получен вывод об энергии, вызывающей кратерообразные повреждения. Могут также применяться параметры, производные от постоянной времени и энергии, например энергия на единицу объема при определенном напряжении.
Способ для определения толщины смазочной пленки через постоянную времени заряда может также применяться на испытательном стенде для подшипников. На этом испытательном стенде определяются толщины смазочной пленки как функция числа оборотов, нагрузки подшипника и температуры. Результатом является параметрическая поверхность, которая интегрируется в имитационную модель. На основе внешних измеренных значений можно теперь сделать вывод относительно толщины смазочной пленки. 3D-характеристические кривые могут, таким образом, определяться на предварительном этапе на испытательном стенде. Также возможно описанный в отношении испытательного стенда метод перенести на онлайновое измерение.
При динамическом процессе возникновения тока подшипника энергия искрового разряда может быть особенно опасной, если разряд происходит в течение короткого времени, так что энергии достаточно, чтобы испарить металл или даже распылить его как плазму, прежде чем энергия будет отведена по теплоотводу со звуковой скоростью. Типовые времена, за которые энергия, приводящая к кратерообразным повреждениям, высвобождается, прежде чем энергия будет отведена, находятся в пределах от 100 пс до 1 нс.
Характеристические кривые, например, относительно постоянных времени могут аналитически вычисляться или моделироваться численным методом и в отношении времени разряда в зависимости от толщины смазочной пленки измеряться. Характеристические кривые образуют затем «мостик» между механическим параметром «толщина смазочной пленки» и уносом материала посредством испарения, который приводит к образованию рифлей. Также на основе комбинации электрической, термодинамической и механической моделей может оцениваться воздействие колебаний, которые вызываются в нормальном режиме или вследствие предварительного повреждения (надрез вследствие транспортировки или монтажа).
Если теперь измеренные значения, которые относятся к подшипнику, в качестве входных параметров применяются для расчетной модели, то тем самым становится возможным определять действительно релевантные параметры, также не распознанные пользователем.
Данные двигателя и системы для формирования модели могут подаваться через простую систему ввода на измерительное устройство (с датчиком). К вычислительному блоку (которым является, например, блок моделирования и/или блок оценки) подключен соответствующий измерительный блок (в частности измерительное устройство), который определяет релевантные внешние данные (например, напряжение между проводником и землей, напряжение на валу, параметры подшипника при функционировании). Комбинация с датчиком тока подшипника также возможна.
Сенсорных блоков может быть более одного. Например, для каждой подшипниковой опоры - один блок. Для измерения клеммных напряжений и параметров заземления - тройной блок и т.д. В одной форме выполнения с каждым сенсорным блоком соединен блок оценки. Однако также возможно соединение двух блоков оценки. Например, вывод о том, имеют ли место при определенном токе подшипника контурные токи, может быть получен комбинацией по меньшей мере двух блоков (положительный пик тока подшипника 1, отрицательный пик тока подшипника 2 -> контурный ток).
Из полученных данных блока моделирования и/или блока оценки могут также делаться логические выводы (следствия) из RCM-предположений и приниматься меры, исходя из состояний износа подшипника и пластичной смазки подшипника. Здесь RCM означает ориентированное на надежность поддержание в исправном состоянии. Под этим, например, может пониматься следующее:
- сокращение интервалов смазки,
- сокращение интервалов смены пластичной смазки,
- сокращение интервалов смены подшипника и т.д.
Имитационная модель, которая, например, исполняется на управляющем компьютере измерительного устройства, может в качестве основы встраиваться в модель двигателя, которая, например, может исполняться на современных платформах моделирования двигателя. Посредством такой электрической модели можно описать высокочастотное поведение двигателя. ВЧ модели дополняются механическими моделями подшипника.
На стадии проектирования установки является возможным за счет встраивания этих моделей в моделирование установки, которое учитывает свойства источника питания, инвертора и системы заземления, получать выводы о возможно проявляющихся критичных нагрузках подшипника. Возможные пути устранения затруднений могут тестироваться уже при моделировании. Моделированные значения с фазы проектирования установки могут теперь, при вводе в соответствующие параметры процесса, служить в качестве сравнительных параметров для идентичной или почти идентичной имитационной модели системы мониторинга состояния (СМ). Возможные различия между реальным функционированием и значениями моделирования могут, таким образом, обнаруживаться и целенаправленно анализироваться. Возможные меры устранения неисправностей таким способом могут выполняться быстрее и эффективнее.
До сих пор в реальных установках во многих местах предпринимались бесцельные изменения в надежде на реализацию правильной модификации. Это является дорогостоящим. За счет предварительного использования моделирования работа может точно ограничиваться той работой, которая ведет к устранению проблемы. На практике за счет этого обеспечиваются преимущества по времени и затратам.
Посредством измерений определяются колебания, при необходимости также температура и другие измеренные значения, например состояние пластичной смазки. Измеренные значения поступают в механическую модель. Температура также может быть известной, причем измерение температуры осуществляется предпочтительно вблизи подшипника. Толщина смазочной пленки взаимосвязана с температурой. Если температура не измеряется, то ее следует оценить или задать постоянной. Оценка может следовать, например, из температуры двигателя (обмотки). На основе механической модели определяется толщина смазочной пленки. Предпочтительным образом это делается в частотной области или во временной области, например, динамически.
При простом методе рассмотрения может приниматься применение постоянного зазора для смазки. С использованием толщины смазочной пленки и других данных, таких как напряжение на подшипнике или косвенных значений, из которых можно вывести напряжение на подшипнике или сопоставимый параметр, с помощью характеристик или модели можно определить энергию, приводящую к образованию кратера, или сопоставимый параметр, который учитывает временной теплоотвод (термодинамическое рассмотрение).
На основе данных для подшипника (например, геометрических данных и данных материала) и модели для уноса материала (например, объема рифлей, энергии сублимации, энергии испарения и/или энергии плавления на единицу объема) можно определить ожидаемый срок службы подшипника. Сравнение с требованиями указывает, необходимы ли изменения. Они могут затем, при необходимости, оцениваться при новом проходе схемы. В зависимости от необходимых изменений может потребоваться полный проход или необходим только частичный проход.
Посредством более сложного формирования модели можно также охватить различные элементы схемы, например посредством модели, которая одновременно охватывает энергию, вызывающую образование кратера, и унос материала. Является предпочтительным, если посредством модели или характеристической кривой комбинируются измерения с моделированием и термодинамическим рассмотрением, в частности теплоотводом.
В одной форме выполнения способа после определения состояния подшипника предпринимается механическое изменение подшипника и/или электрической машины. При этом под определением состояния подшипника понимается следующее:
- определение, оценка и/или вычисление тока подшипника;
- определение, оценка и/или вычисление износа подшипника;
- определение, оценка и/или вычисление остаточного времени подшипника и т.д.
Под механическим изменением подшипника и/или электрической машины понимается следующее:
- меры относительно изоляции подшипника;
- установка щеток заземления;
- установка симметрично экранированного кабеля подключения двигателя;
- установка экранированного контактирования над 360о соединениями;
- ВЧ заземление одного или более компонентов, как, например, электрической машины, подшипника и/или инвертора;
- соединение в сеть заземления установки;
- выполнение выравнивания потенциала в системе и/или
- использование синфазного фильтра.
В одной форме выполнения способа после определения состояния подшипника предпринимается механическое изменение подшипника и/или электрической машины, после чего выполняется дальнейшее определение состояния подшипника.
Система может быть выполнена таким образом, чтобы модель или модели выполнялись на встроенном управляющем компьютере. Управляющий компьютер может, например, представлять собой управление с программируемой памятью или также главный управляющий компьютер.
В системе для контроля подшипника может применяться блок оценки для определения по меньшей мере одного из следующих значений:
- тока подшипника;
- энергии, переносимой через зазор для смазки подшипника;
- плотности энергии, переносимой через зазор для смазки подшипника;
- значения для срока службы подшипника и/или остаточного срока службы;
- значения для состояния износа подшипника или
- значения для состояния истирания пластичной смазки подшипника.
В одной форме выполнения системы она содержит выпрямитель тока, причем выпрямитель тока информационно-технически соединен с по меньшей мере одним из следующих блоков:
- с блоком моделирования;
- с сенсорным блоком;
- с блоком оценки или
- с комбинацией этих блоков.
За счет этого информационно-технического соединения на соответствующий блок могут передаваться данные, относящиеся к напряжению, току, импульсному образцу, энергии, действительной мощности, реактивной мощности, напряжению промежуточного контура, частоте, чтобы эта информация там обрабатывалась.
Другие возможные признаки, преимущества и особенности изобретения следуют в качестве примера из нижеследующего описания вариантов выполнения со ссылками на чертежи, на которых показано следующее:
Фиг.1 - принципиальное представление структуры динамоэлектрической машины с окружающими частями установки;
Фиг.2 - система для определения состояния подшипника для подшипника электрической машины;
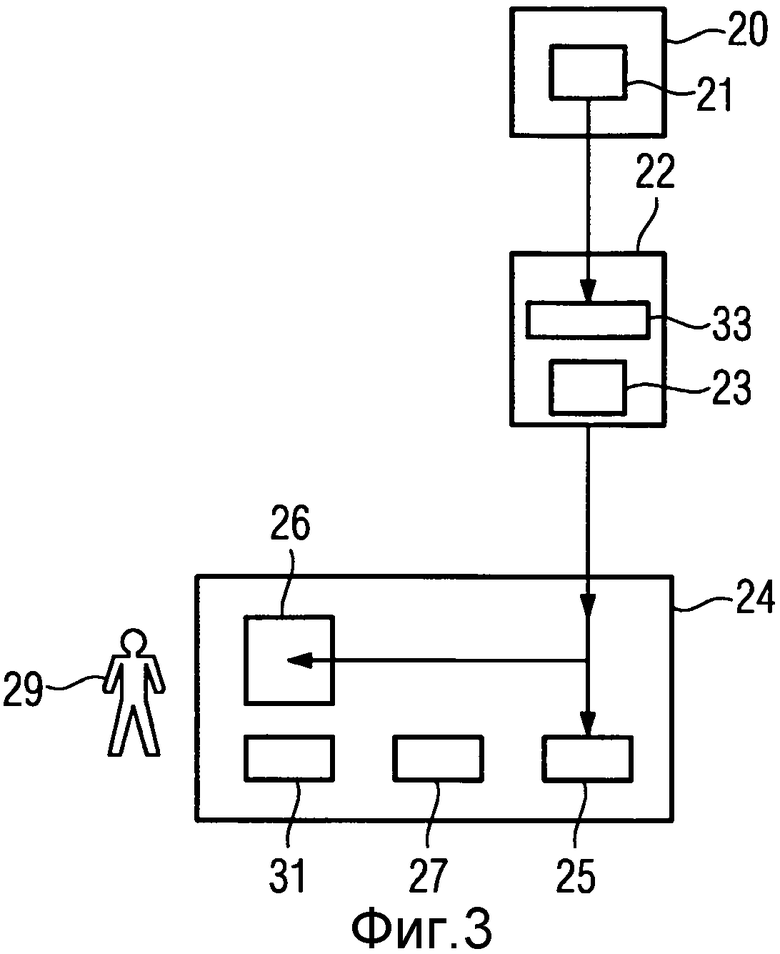
Фиг.3 - способ для определения состояния подшипника для подшипника электрической машины;
Фиг.4 - способ проверки срока службы подшипника.
Соответствующие друг другу части обозначены на чертежах одинаковыми ссылочными позициями.
Фиг.1 показывает принципиальное представление структуры динамоэлектрической машины с окружающими частями установки. При этом, в частности, инвертор 1 через соединительные линии 7 подключен к динамоэлектрической машине, которая находится внутри корпуса 10 двигателя и имеет статор 11 и ротор 12, который через подшипники 14 и вал 13 через муфту 9 приводит в действие нагрузочную машину 8 или приводится ею.
Электрическое соединение между инвертором 1 и динамоэлектрической машиной через соединительный кабель 7 имеет экран 6 кабеля, который имеет соответствующее соединение с заземлением инвертора или корпуса двигателя. Как инвертор 1, так и нагрузочная машина 8 через заземление 2 или 4 соединены с землей 3. Также двигатель может быть соединен с землей, на чертеже это вообще не показано. Двигатель может, например, иметь две точки заземления. Одна точка заземления лежит, например, в области основания двигателя. Другая точка заземления лежит, например, в области клеммной коробки двигателя. Инвертор 1, в частности как инвертор с промежуточным контуром напряжения, проявляет свое выходное напряжение посредством регулируемого включения промежуточного контура постоянного напряжения на выходе. Переход между положительным и отрицательным потенциалами в быстрой последовательности приводит в двухпозиционном выпрямителе переменного тока к характеристике напряжения, у которой сумма трехфазного напряжения не равна нулю, и получается так называемое синфазное напряжение. Каждое из этих действий переключения напряжения с большой крутизной обуславливает высокочастотные возбуждения с вытекающими отсюда токами, которые через паразитные пути возвращаются назад к источнику.
Представление на фиг.2 показывает систему, которая содержит:
- сенсорный блок 20;
- блок 22 моделирования;
- блок 24 оценки;
- выпрямитель 1 тока.
Сенсорный блок 20 информационно-технически соединен с блоком 22 моделирования. Блок 22 моделирования информационно-технически соединен с блоком 24 оценки. Выпрямитель 1 тока информационно-технически соединен с блоком 24 оценки. Блок 24 оценки имеет блок 26 вывода данных для индикации (дисплей). От выпрямителя 1 тока значения 31 состояния могут передаваться на блок 24 оценки и там сохраняться. Функции блока 22 моделирования и блока 24 оценки могут быть реализованы в программном обеспечении с помощью аппаратных средств.
В одной форме выполнения блок 22 моделирования и блок оценки встроены в управляющий компьютер 36. Представленная на фиг.2 схематичная структура системы для оценки подшипника показывает, что может быть реализована оценка в реальном времени состояния подшипника.
Представление согласно фиг.3 показывает способ, каким образом может быть определено состояние подшипника. Посредством сенсорного блока 20 определяется измеренное значение 21. Измеренное значение 21 передается на блок 22 моделирования. Блок 22 моделирования имеет модель 33. Посредством модели 33, которая также может быть характеристической кривой, и измеренного значения 21 определяется результирующее значение 23. Результирующее значение 23 передается на блок 24 оценки. Блок 24 оценки имеет блок 26 вывода на экран индикации, которая может считываться оператором 29. С помощью результирующих значений 25, 26 определяется по меньшей мере одно значение 31 состояния контролируемого подшипника.
Представление согласно фиг.4 показывает способ проверки срока службы подшипника. Сначала выполняется измерение 40. Это касается, в частности, значений колебания и/или значений температуры. Через путь 42 данных значения передаются в механическую модель 44. С помощью этой механической модели 44 можно, например, определить толщину смазочной пленки, ее временной ход и/или соответствующую амплитудно-частотную характеристику. Эти значения (например, толщина смазочной пленки) через путь 46 данных передаются дальше, чтобы их ввести в характеристическую кривую 48 или модель 48 для определения энергии, вызывающей образование кратера. Эта промежуточная модель 48 (характеристическая кривая или модель для энергии, вызывающей образование кратера) не только посредством значений 46 загружается из механической модели 44, но и посредством других значений 47. Таковыми являются, например:
- температура;
- BVR (коэффициент напряжения на подшипнике);
- напряжение промежуточного контура инвертора 1;
- синфазное напряжение;
- напряжение на подшипнике и т.д.
Кроме того, по пути 41 данных измеренные значения из измерения 40 могут обрабатываться в модели 48.
По пути 50 данных результирующие значения, например энергия, вызывающая образование кратера, которые могут определяться посредством характеристической кривой или модели 48, поступают в модель для уноса материала 52. Данные подшипника по пути 51 данных загружаются в модель для уноса материала 52. Отсюда получается значение относительно прогнозируемого срока службы подшипника. Это значение для прогнозируемого срока службы подшипника по пути 54 данных передается на устройство 56 для оценки ожидаемого срока службы. Это устройство 56 по пути 55 данных загружается данными относительно требований к сроку службы подшипника.
Если, например, оценка ожидаемого срока службы слишком низкая, то может инициироваться изменение конструкции, после чего вновь инициируется измерение 40. Это показывается посредством пути 57 данных. Для случая, когда оценка ожидаемого срока службы может рассматриваться как удовлетворительная, эта информация по пути 58 данных может, например, графически выдаваться на дисплей 60.


Изобретение относится к измерительной технике, в частности для определения состояния подшипника электрической машины. Способ заключается в том, что посредством сенсорного блока (20) определяют измеренное значение (21). Измеренное значение передают на блок (22) моделирования. Посредством блока (22) моделирования определяют результирующее значение (23), причем результирующее значение представляет собой, в частности, значение тока подшипника или значение, зависимое от тока подшипника. Результирующее значение (23) передают на блок (24) оценки, посредством которого результирующее значение (23) обрабатывают таким образом, что определяют значение состояния подшипника. При этом значения (25, 27) состояния подшипника или значения, зависимые от значений состояния подшипника, сохраняют вместе со значением (31) состояния выпрямителя (1) тока. Также заявлена измерительная система, реализующая указанный способ. Технический результат заключается в возможности моделировать ток или электрическую нагрузку подшипника. 2 н. и 11 з.п. ф-лы, 4 ил.
1. Способ определения состояния подшипника электрической машины, в котором
посредством сенсорного блока (20) определяют измеренное значение (21),
измеренное значение передают на блок (22) моделирования,
посредством блока (22) моделирования определяют результирующее значение (23), причем результирующее значение представляет собой, в частности, значение тока подшипника или значение, зависимое от тока подшипника,
результирующее значение (23) передают на блок (24) оценки,
посредством блока (24) оценки результирующее значение (23) обрабатывают таким образом, что определяют значение состояния подшипника,
значения (25, 27) состояния подшипника или значения, зависимые от значений состояния подшипника, сохраняют вместе со значением (31) состояния выпрямителя (1) тока.
2. Способ по п.1, отличающийся тем, что предусмотрен блок отображения на экране (26), причем на блоке отображения на экране представляют результирующее значение (23).
3. Способ по п.1, отличающийся тем, что измеренные значения (21) обрабатываются в блоке (22) моделирования в реальном времени, причем значения (25, 27) состояния подшипника представляют оператору (29) в реальном времени.
4. Способ по п.2, отличающийся тем, что измеренные значения (21) обрабатывают в блоке (22) моделирования в реальном времени, причем значения (25, 27) состояния подшипника представляют оператору (29) в реальном времени.
5. Способ по любому из пп.1-4, отличающийся тем, что после определения состояния подшипника выполняют механическое изменение подшипника и/или электрической машины, после чего выполняют дальнейшее определение состояния подшипника.
6. Система для определения состояния подшипника для подшипника (14) электрической машины (10, 11, 12, 13), содержащая:
- блок (22) моделирования,
- сенсорный блок (20) и
- блок (24) оценки,
причем блок (22) моделирования предусмотрен для обработки данных (21) сенсорного блока (20) и причем блок (24) оценки предусмотрен для обработки данных блока (22) моделирования, причем блок моделирования (22) предусмотрен для определения результирующего значения (23), которое передается в блок (24) оценки, а блок (24) оценки обрабатывает результирующее значение (23) таким образом, что определяется значение (25, 27) состояния подшипника, причем значения (25, 27) состояния подшипника или значения, зависимые от значений состояния подшипника, сохраняются вместе со значением (31) состояния выпрямителя (1) тока.
7. Система по п.6, отличающая тем, что система выполнена с возможностью осуществления способа определения состояния подшипника электрической машины по любому из пп.1-5.
8. Система по п.6, отличающаяся тем, что блок (22) моделирования имеет модель (33) для вычисления энергии, вызывающей образование кратера в подшипнике.
9. Система по п.8, отличающаяся тем, что модель (33) исполняется на встроенном управляющем компьютере (36).
10. Система по п.6, отличающаяся тем, что блок (24) оценки предусмотрен для определения по меньшей мере одного из следующих значений:
- тока подшипника;
- энергии, переносимой через зазор для смазки подшипника;
- плотности энергии, переносимой через зазор для смазки подшипника;
- значения для срока службы подшипника и/или остаточного срока службы;
- значения для состояния износа подшипника или
- значения для состояния истирания пластичной смазки подшипника.
11. Система по п.7, отличающаяся тем, что блок (24) оценки предусмотрен для определения по меньшей мере одного из следующих значений:
- тока подшипника;
- энергии, переносимой через зазор для смазки подшипника;
- плотности энергии, переносимой через зазор для смазки подшипника;
- значения для срока службы подшипника и/или остаточного срока службы;
- значения для состояния износа подшипника или
- значения для состояния истирания пластичной смазки подшипника.
12. Система по п.8, отличающаяся тем, что блок (24) оценки предусмотрен для определения по меньшей мере одного из следующих значений:
- тока подшипника;
- энергии, переносимой через зазор для смазки подшипника;
- плотности энергии, переносимой через зазор для смазки подшипника;
- значения для срока службы подшипника и/или остаточного срока службы;
- значения для состояния износа подшипника или
- значения для состояния истирания пластичной смазки подшипника.
13. Система по любому из пп.6-12, отличающаяся тем, что она содержит выпрямитель (1) тока, причем выпрямитель (1) тока информационно-технически соединен по меньшей мере с одним из следующих блоков:
- с блоком (22) моделирования;
- с сенсорным блоком (20);
- с блоком (24) оценки или
- с комбинацией этих блоков.
| СИСТЕМА КАЛИБРОВ ВАЛКОВ НЕПРЕРЫВНОГО СОРТОВОГО ПРОКАТНОГО СТАНА | 1995 |
|
RU2089305C1 |
| DE 102004056996 A1 01.06.2006 | |||
| РАСТВОР ИНСУЛИНА ДЛЯ ПЕРОРАЛЬНОГО ВВЕДЕНИЯ | 2005 |
|
RU2288000C1 |
| US 5030917 A 09.07.1991 | |||

