Область техники
Настоящее изобретение относится к конвейерному устройству с использованием конвейерного подвижного элемента, который может использоваться и в секции винтового привода, где ходовой винт поддерживается вдоль линии движения, и в секции цепного привода, где снабженный толкателем цепной конвейер натянут вдоль линии движения.
Предшествующий уровень техники
Известно, что этот вид конвейерного устройства с использованием конвейерного подвижного элемента может быть получен посредством применения конвейерного подвижного элемента с ведомым роликом, который взаимодействует с ходовым винтом, и входящего в зацепление элемента, который входит в зацепление с толкателем снабженного толкателем цепного конвейера, как описано в Патентном документе 1. Обычное конвейерное устройство с использованием конвейерного подвижного элемента этого вида, как описано в Патентном документе 1, выполнено таким образом, что широкий конвейерный элемент тележечного типа имеет нижнюю часть, снабженную вышеупомянутым ведомым роликом и зацепляющимся элементом, расположенными рядом в поперечном направлении.
Документы предшествующего уровня техники
Патентный документ 1: Опубликованная нерассмотренная заявка на патент Японии №2001-122422.
Сущность изобретения
Проблемы, решаемые изобретением
Известен конвейерный подвижный элемент, содержащий опорную балку, которая снабжена соединительной частью, имеющей форму штанги, удлиненной в направлении движения и приспособленной для движения с поворотом, и которая имеет боковые поверхности, используемые как поверхности фрикционного привода, множество передвижных элементов, поддерживающих соединительную часть опорной балки, и вертикальные стойки, поднимающиеся от двух - переднего и заднего - передвижных элементов соответственно и имеющие соответствующие верхние концы, поддерживающие несущее основание для транспортируемого объекта. Этот вид конвейерного подвижного элемента может быть конфигурирован таким образом, что две - передняя и задняя - стойки движутся, проникая по вертикали сквозь щелевое отверстие, сформированное в настиле, для обеспечения движения опорной балки и поддерживающих ее передвижных элементов внутри проходящего под настилом пространства и движения несущего основания для транспортируемого объекта в рабочем пространстве над настилом.
Когда пытаются получить конвейерный подвижный элемент, используемый в описанной выше форме с ведомым роликом, взаимодействующим с ходовым винтом, и с зацепляющимся элементом, зацепляющимся с толкателем оснащенного толкателем цепного конвейера, зацепляющийся элемент, который входит в зацепление с толкателем оснащенного толкателем цепного конвейера, может быть расположен на нижней стороне передвижного элемента, который движется внутри находящегося под настилом пространства, как описано в Патентном документе 1, но не является практичным поддерживание ведомого ролика, входящего в зацепление с ходовым винтом на боковой стороне передвижного элемента, который поддерживает несущее основание для транспортируемого объекта, так как передвижной элемент имеет по существу небольшую величину по сравнению со всем несущим основанием транспортируемого объекта и также удерживается двумя левым и правым направляющими рельсами. Кроме того, если предпринимается попытка установки ведомого ролика с возможностью поворота на боковой стороне опорной балки, от фрикционного привода можно отказаться.
Таким образом, можно предусматривать удерживание с возможностью поворота ведомого ролика на несущем основании для транспортируемого объекта, которое движется в рабочем пространстве над настилом и в положении сбоку от опорной балки. Однако ведомый ролик должен быть расположен внутри находящегося под настилом пространства. Соответственно, применен удерживающий элемент для ведомого ролика, который подвешен на несущем основании для транспортируемого объекта и проходит в пространство под настилом, причем ведомый ролик с возможностью поворота удерживается на нижнем конце удерживающего элемента для ведомого ролика. В результате возникает потребность применения в настиле широкого щелевого отверстия, способного пропускать две - переднюю и заднюю - вертикальные стойки, которые поддерживают несущее основание для транспортируемого объекта и удерживающего элемента для ведомого ролика, или потребность применения щелевого отверстия для прохождения удерживающего элемента для ведомого ролика кроме щелевого отверстия для прохождения вертикальных стоек, которые поддерживают несущее основание для транспортируемого объекта. Однако эти щелевые отверстия совмещены с двумя - левым и правым - покрывающими материалами, выполненными из резиновых пластин, которые позволяют вертикальным стойкам и удерживающему элементу для ведомого ролика проходить, но могут в нормальном положении закрывать отверстия. В результате, не только затраты на установку настила становятся очень высокими в целом, но также и циркуляция воздуха между находящимся под настилом пространством и рабочим пространством над настилом усиливается по сравнению со случаем необходимости только одного узкого щелевого отверстия, таким образом, затрудняя поддержание хороших атмосферных условий в рабочем пространстве над настилом.
Средства для решения проблем
Соответственно, настоящее изобретение предлагает конвейерное устройство с использованием конвейерного подвижного элемента, который может решить указанные выше проблемы предшествующего уровня техники. Конвейерное устройство с использованием конвейерного подвижного элемента согласно настоящему изобретению, описанного со ссылками на ссылочные позиции в круглых скобках, используемые в описании варианта осуществления изобретения, описанного ниже для облегчения понимания взаимоотношения с вариантом осуществления изобретения, является конвейерным устройством с использованием конвейерного подвижного элемента (1), снабженного ведомым роликом (20a), зацепляющимся с ходовым винтом (37), удерживаемым вдоль секции винтового привода линии движения, и зацепляющегося элемента (5a), зацепляющегося с толкателем (47) снабженного толкателем цепного конвейера (38), натянутого вдоль секции цепного привода линии движения. Конвейерный подвижный элемент (1) содержит, по меньшей мере, передний и задний передвижные элементы (5 и 6), опорную балку (4), соединяющую друг с другом передний и задний передвижные элементы (5 и 6), вертикальные стойки (23a и 23b), поддерживаемые передним и задним передвижными элементами (5 и 6) соответственно и несущее основание (3) для транспортируемого объекта, поддерживаемое передней и задней вертикальными стойками (23a и 23b). Зацепляющийся элемент (5a) выступает на нижней стороне, по меньшей мере, одного из переднего и заднего передвижных элементов (5 и 6). Несущее основание (3) для транспортируемого объекта снабжено несущим элементом (24a) для ведомого ролика, имеющим верхнюю стойку (60), выступающую вниз на центральной продольной линии, проходящей через переднюю и заднюю вертикальные стойки (23a и 23b), и нижний рычаг (61), проходящий в боковую сторону от нижнего конца верхней стойки (60). Ведомый ролик (20a) удерживается с возможностью поворота нижним рычагом (61) удерживающего элемента (24a) для ведомого ролика и также расположен выше поперечного положения опорной балки (4).
Эффекты изобретения
Согласно конвейерному устройству с использованием конвейерного подвижного элемента, соответствующего настоящему изобретению, во время приведения в действие конвейерного подвижного элемента для движения в секции винтового привода, ведомый ролик на стороне несущего основания для транспортируемого объекта конвейерного подвижного элемента входит в зацепление со спиральной частью ходового винта, который удерживается вдоль линии движения и приводится во вращение. В результате, конвейерный подвижный элемент может приводиться в действие для движения со скоростью движения, которая определена шагом и скоростью вращения спиральной части ходового винта. При приведении в действие этого конвейерного подвижного элемента для движения в секции цепного привода, зацепляющийся элемент на нижней стороне передвижного элемента конвейерного подвижного элемента толкается толкателем цепного конвейера. В результате, конвейерный подвижный элемент может приводиться в действие для движения со скоростью движения толкателя цепного конвейера.
Таким образом, один конвейерный подвижный элемент может приводиться в действие для движения и в секции винтового привода, и в секции цепного привода. Согласно конфигурации настоящего изобретения, ведомый ролик для приведения в движение конвейерного подвижного элемента для движения в секции винтового привода поддерживается к стороне несущего основания для транспортируемого объекта несущим элементом для ведомого ролика. Удерживающий элемент для ведомого ролика расположен на центральной продольной линии, которая проходит через переднюю и заднюю вертикальные стойки для поддерживания несущего основания для транспортируемого объекта к сторонам передвижных элементов. Когда настил устроен таким образом, что он по вертикали отделяет пространство, где движется несущее основание для транспортируемого объекта, и пространство, где движутся передвижные элементы и опорная балка, может использоваться единственное узкое щелевое отверстие, выполненное в настиле для пропускания передней и задней вертикальных стоек, как для пропускания удерживающего элемента для ведомого ролика. Не только затраты на установку настила могут быть уменьшены по сравнению со случаем, когда дополнительно применено щелевое отверстие, предназначенное для удерживающего элемента для ведомого ролика, или когда применяют широкое щелевое отверстие, но также и хорошая атмосферная среда пространства над настилом может поддерживаться также легко, как прежде.
Кроме того, ведомый ролик находится в положении выше, чем опорная балка, которая соединяет передвижные элементы таким образом, что боковые поверхности опорной балки могут использоваться как поверхности фрикционного привода, и фрикционная передача становится доступной в приводной секции, где ведомый ролик не приводится ходовым винтом. Другими словами, секция фрикционного привода, где средство фрикционного привода с использованием боковых поверхностей опорной балки используют наряду с секцией винтового привода, где используется ходовой винт, и секцией цепного привода, где зацепляющийся элемент на нижней стороне передвижного элемента толкается толкателем цепного конвейера, могут быть включены в конвейерное устройство, соответствующее настоящему изобретению.
С другой стороны, удерживающий элемент для ведомого ролика может быть сформирован в L-образной форме посредством непрерывного расположения рычага от нижнего конца верхней стойки в горизонтальном поперечном направлении, и ведомый ролик может удерживаться с возможностью поворота на нижней стороне дистального конца рычага вертикальной осью и затем входить в зацепление со спиральной частью в положении непосредственно над центральной осью ходового винта. Однако в этом случае промежуток в поперечном направлении от центральной линии в продольном направлении, где расположены передвижные элементы конвейерного подвижного элемента, до положения вхождения в зацепление между ведомым роликом и ходовым винтом становится большим. В результате, поперечный компонент направления силы, воздействующей на конвейерный подвижный элемент во время приведения в движение ходовым винтом, увеличен, что приводит к затруднению плавного привода и движения.
Однако если используют такую конфигурацию, в которой нижний рычаг (61) удерживающего элемента (24a) для ведомого ролика наклонен вниз от верхней стойки (60), и ведомый ролик (20a) с возможностью поворота удерживается с наклоном таким образом, что его аксиальный центр становится параллельным наклонному вниз направлению нижнего рычага (61), положение зацепления между ведомым роликом и ходовым винтом может быть смещено к стороне ближе к продольной центральной линии, где расположены передвижные элементы конвейерного подвижного элемента, чем к положению непосредственно над центральной осью ходового винта. В результате, промежуток в поперечном направлении от центральной линии до положения зацепления между ведомым роликом и ходовым винтом становится короче, таким образом уменьшая поперечный компонент силы, воздействующей на конвейерный подвижный элемент во время приведения в движение ходовым винтом и также облегчая осуществление плавного привода и движения. Кроме того, положение ходового винта может оказываться выше, чем в случае, когда рычаг удерживающего элемента для ведомого ролика находится в положении непосредственно над ходовым винтом. Таким образом, расположение ходового винта внутри поперечно ограниченных узких пространств для движения передвижных элементов и опорной балки облегчено.
Кроме того, требуется только один ведомый ролик, входящий в зацепление со спиральной частью ходового винта для конвейерного подвижного элемента. Однако удерживающий элемент (24a или 24b) для ведомого ролика, в котором ведомый ролик (20a или 20b) с возможностью поворота удерживается нижним рычагом (61), расположен в передней и задней паре на продольной центральной линии, проходящей переднюю и заднюю вертикальные стойки (23a и 23b), посредством чего конвейерный подвижный элемент может легко катиться в секции без винтов между ходовыми винтами, как обычно бывает в конвейерном устройстве с винтовым приводом.
Кроме того, как уже описано, передняя и задняя две вертикальные стойки (23a и 23b) и верхняя стойка (60) удерживающего элемента (24a) для ведомого ролика предпочтительно конфигурированы для движения с проникновением по вертикали сквозь одно щелевое отверстие (58), расположенное в настиле (57), установленном таким образом, что он по вертикали отделяет пространство, где движется несущее основание (3) для транспортируемого объекта, и пространство, где движутся передвижные элементы (5 и 6) и опорная балка (4).
Краткое описание чертежей
Фиг.1 - вид сбоку всего конвейерного устройства в секции винтового привода.
Фиг.2 - вид в плане, показывающий ходовой винт и ведомый ролик конвейерного устройства, показанного на фиг.1, и вид в плане, показывающий основной корпус конвейерного подвижного элемента.
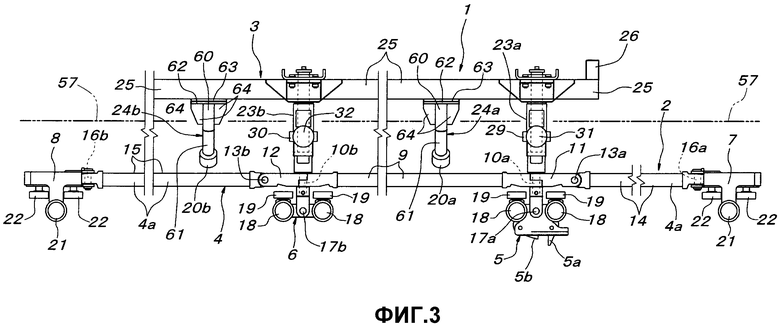
Фиг.3 - частичный вид сбоку конвейерного подвижного элемента.
Фиг.4A - продольный вид спереди сечения всего конвейерного устройства в секции винтового привода.
Фиг.4B - продольный вид спереди сечения его основной части.
Фиг.5 - вид сбоку основной части конвейерного устройства в секции цепного привода.
Фиг.6 - вид спереди части, показанной на фиг.5.
Фиг.7 - вид сбоку основной части конвейерного устройства в секции фрикционного привода.
Фиг.8 - продольный вид спереди сечения указанной выше основной части конвейерного устройства.
Фиг.9 - вид в плане указанной выше основной части конвейерного устройства.
Вариант (варианты) осуществления изобретения
На фиг.1-4 ссылочная позиция 1 обозначает конвейерный подвижный элемент, который состоит из основного корпуса 2 и несущей опоры 3 для перемещаемого объекта, удерживаемой основным корпусом 2. Основной корпус 2 конвейерного подвижного элемента 1 состоит из опорной балки 4 с длиной в направлении движения, несущих передвижных элементов 5 и 6, поддерживающих две точки спереди и сзади в средней части опорной балки 4, и направляющих передвижных элементов 7 и 8, расположенных на переднем и заднем концах опорной балки 4. Опорная балка 4 состоит из элемента 9 опорной балки между несущими передвижными элементами 5 и 6, соединительных элементов 11 и 12, соединенных с обоими концами элемента 9 опорной балки таким образом, что они могут поворачиваться в горизонтальной плоскости вокруг вертикальных осей 10a и 10b, элементов 14 и 15 опорной балки, соединенных с соединительными элементами 11 и 12 таким образом, что они могут поворачиваться вокруг горизонтальных осей 13a и 13b, и направляющих передвижных элементов 7 и 8, соединенных с элементами 14 и 15 опорной балки таким образом, что они могут поворачиваться в горизонтальной плоскости вокруг вертикальных осей 16a и 16b. Левая и правая боковые поверхности опорной балки 4 формируют плоские поверхности 4a и 4b фрикционного привода, продолжающиеся по всей длине между направляющими передвижными элементами 7 и 8 на обоих дистальных концах.
Несущие передвижные элементы 5 и 6 прикреплены к нижним концам вертикальных осей 10a и 10b, расположенным в двух местах, то есть в передней и задней точках средней части опорной балки 4, таким образом, что они могут поворачиваться вокруг горизонтальных поперечных осей 17a и 17b. Каждый несущий передвижной элемент 5 и 6 включает переднюю и заднюю две пары левого и правого опорных колес 18 с возможностью поворота удерживаемых горизонтальными поперечными осями и парой передней и задней роликов 19 поперечной устойчивости, удерживаемых вертикальными осями. Направляющие передвижные элементы 7 и 8 на обоих концах опорной балки 4 каждая включает пару из левого и правого опорных колес 21, удерживаемых с возможностью поворота горизонтальными поперечными осями и парой передней и задней роликов 22 поперечной устойчивости, удерживаемых с возможностью поворота вертикальными осями.
Несущее основание 3 для транспортируемого объекта состоит из пары передней и задней стоек 23a и 23b, поддерживаемых спаренными передними и задними несущими передвижными элементами 5 и 6 при помощи вертикальных осей 10a и 10b в передней и задней частях средней части опорной балки 4, продольного элемента 25, удерживаемого на стойках 23a и 23b и параллельного направлению движения, и пары переднего и заднего поперечных элементов 26 и 27, удерживаемых на переднем и заднем концах продольного элемента 25 в Т-образной форме. Опорные стойки 28 для поддерживания транспортируемого объекта (корпуса автомобиля) W прикреплены на поперечных элементах 26 и 27. Кроме того, рычажные элементы 29 и 30, проходящие горизонтально к обеим боковым сторонам, расположены на промежуточных высотах спаренных передней и задней стоек 23a и 23b. Направляющие ролики 31 и 32 поперечной устойчивости удерживаются с возможностью поворота на обоих боковых концах рычажных элементов 29 и 30 горизонтальными поперечными осями. Несущее основание 3 для транспортируемого объекта выполнено таким образом, что снабжено несущими элементами 24a и 24b для ведомых роликов, выступающими вниз от продольного элемента 25 в соответствующих задних положениях спаренных передней и задней стоек 23a и 23b. Оба несущих элемента 24a и 24b для ведомых роликов имеют соответствующие нижние концы, на которых с возможностью поворота удерживаются ведомые ролики 20a и 20b.
Далее дано более подробное описание. Как показано на фиг.3 и фиг.4B, каждый из несущих элементов 24a и 24b для ведомых роликов выполнен с вертикальной верхней стойкой 60 и нижним рычагом 61, наклоненным в сторону и вниз от нижнего конца верхней стойки 60. Каждый ведомый ролик 20a и 20b удерживается с возможностью поворота на дистальном конце рычага 61 в таком направлении, что его центральная ось вращения совмещена с направлением длины нижнего рычага 61. Крепежная пластина 62, прикрепленная к верхнему концу верхней стойки 60, прикреплена болтами и гайками к крепежной опоре 63, закрепленной на нижней стороне продольного элемента 25 несущего основания 3 для транспортируемого объекта. Пара передней и задней вертикальных усиливающих пластин 64 установлена параллельно продольному элементу 25 и в переднем и заднем внутренних углах между верхней стойкой 60 и крепежной пластиной 62.
При наблюдении конвейерного подвижного элемента 1 спереди удерживающий элемент 24a (24b) для ведомого ролика имеет верхнюю стойку 60, расположенную на центральной продольной линии, проходящей спаренные переднюю и заднюю стойки 23a и 23b, как показано на фиг.4A. Таким образом, верхняя стойка 60 перекрывается со спаренными передними и задними стойками 23a и 23b и не видна. Только нижний рычаг 61 выглядит как выступающий наклонно вниз от одного из нижних левого и правого внутренних углов между стойкой 23a (23b) и рычагом 29 (30). Ведомый ролик 20a или 20b, с возможностью поворота удерживаемый на дистальном конце рычага 61 в указанном выше направлении, конфигурирован для расположения выше бокового положения опорной балки 4.
На линии движения конфигурированного, как указано выше, конвейерного подвижного элемента 1 установлен опорный направляющий рельс 34, состоящий из пары левого и правого обращенных друг к другу швеллерных рельсов 33a и 33b. Левый и правый обращенные друг к другу швеллерные рельсы 33a и 33b с возможностью качения поддерживают соответствующие опорные колеса 18 и 21 несущих передвижных элементов 5 и 6 основного корпуса 2 и направляющих передвижных элементов 7 и 8 на обоих концах опорной балки 4. Кроме того, спаренные левый и правый обращенные друг к другу швеллерные рельсы 33a и 33b опорного направляющего рельса 34 снабжены рельсами 33c и 33d поперечной устойчивости, между которыми находятся соответствующие ролики 19 и 22 поперечной устойчивости несущих передвижных элементов 5 и 6 и направляющих передвижных элементов 7 и 8 с обеих боковых сторон. Кроме того, направляющий рельс 36 поперечной устойчивости, состоящий из пары левого и правого обращенных друг к другу швеллерных рельсов 35a и 35b, установлен, по меньшей мере, на участке линии транспортировки на линии движения конвейерного подвижного элемента 1, где транспортируемый объект W транспортируется при удерживании на несущем основании 3 для транспортируемого объекта. В паре левого и правого обращенных друг к другу швеллерных рельсов 35a и 35b с возможностью качения индивидуально установлены направляющие ролики 31 и 32 поперечной устойчивости, приспособленные для спаренных передней и задней стоек 23a и 23b несущего основания 3 для транспортируемого объекта.
Линия движения конвейерного подвижного элемента 1 сформирована как бесконечная линия циркулирующего движения посредством комбинирования секции винтового привода конвейерного подвижного элемента 1 для движения ходового винта 37, как показано на фиг.1, 2 и 4, секции цепного привода для привода конвейерного подвижного элемента 1 для движения снабженного толкателем цепного конвейера 38, как показано на фиг.5 и фиг.6, и секции фрикционного привода для привода конвейерного подвижного элемента 1 для движения средством 39 фрикционного привода, как показано на фиг.7-9. Конвейерный подвижный элемент 1 конфигурирован для циркуляционного движения в диапазоне скоростей движения для соответствующих приводных секций.
Ходовой винт 37, образующий секцию винтового привода, сформирован концентрическим и линейным соединением необходимого количества элементов 40 ходового винта. Каждый элемент 40 ходового винта сформирован посредством наматывания ленточной пластины в спиральной форме на спиральный корпус 41, и спиральный корпус 41 устанавливают снаружи на вал 42, имеющий заданную длину, и затем концентрически фиксируют. Между смежными боковыми сторонами спирального корпуса 41 сформирован спиральный паз 41a. Вал 42 каждого узла 40 ходового винта имеет концы, концентрически удерживаемые соответствующими подшипниками 43a и 43b. Валы 42 смежных узлов 40 ходового винта соединяются друг с другом между подшипниками 43a и 43b соединителями 44 валов. Конфигурированный таким образом ходовой винт 37 удерживается вдоль линии движения конвейерного подвижного элемента 1 таким образом, что ведомые ролики 20a и 20b на стороне конвейерного подвижного элемента 1 входят в спиральный паз 41a спирального корпуса 41. Вся длина спирального корпуса 41 каждого узла 40 ходового винта короче, чем длина вала 42. Спиральные корпусы 41 расположены линейно, будучи равномерно разнесенными с интервалами, не имеющими винтов и имеющими по существу такую же длину, как и вся длина каждого спирального корпуса 41. Длина каждого спирального корпуса 41 и длина пространства без винтов между соответствующими спиральными корпусами 41 в ходовом винте 37 по существу равны расстоянию между спаренными передними и задними ведомыми роликами 20a и 20b на стороне конвейерного подвижного элемента 1. Разумеется, ходовой винт 37 соединяется с приводным двигателем на одном конце или в его промежуточном положении и приводится во вращение в заданном направлении с заданной частотой вращения, хотя это не показано.
Согласно описанной выше конфигурации секции винтового привода, спиральный корпус 41 прилагает осевое усилие в направлении рабочего хода к несущему основанию 3 для транспортировки объекта конвейерного подвижного элемента 1 через передний ведомый ролик 20a конвейерного подвижного элемента 1 посредством вращения винта 37, в то время как ведомый ролик 20a вставлен в спиральный паз 41a спирального корпуса 41. В результате, конвейерный подвижный элемент 1 направляется опорным направляющим рельсом 34 и направляющим рельсом 36 поперечной устойчивости и движется вперед с заданной скоростью. Когда передний ведомый ролик 20a выходит из переднего конца одного спирального паза 41a одного спирального корпуса 41, задний ведомый ролик 20b одновременно вводится в заднюю часть спирального паза 41a этого спирального корпуса 41. Когда задний ведомый ролик 20b выходит из переднего конца спирального паза 41a этого спирального корпуса 41, передний ведомый ролик 20a, прошедший пространство, не имеющее винта, проходящее до следующего спирального корпуса 41, одновременно вводится в заднюю часть спирального паза 41a следующего спирального корпуса 41. Таким образом, конвейерный подвижный элемент 1 непрерывно движется вперед, не останавливаясь в секции винтового привода.
В этот момент, когда ходовой винт 37, удерживаемый в секции винтового привода, конфигурирован, как описано выше, спаренные передние и задние ведомые ролики 20a и 20b на стороне конвейерного подвижного элемента 1 не вставлены одновременно в спиральные пазы 41a двух спиральных корпусов 41, смежных в направлении движения. Таким образом, узлы 40 ходового винта, спиральные пазы 41a которых имеют разные шаги, то есть узлы 40 ходового винта с разными скоростями подачи комбинируются, таким образом позволяя изменять скорость движения конвейерного подвижного элемента 1 в одной секции винтового привода. Следует отметить, что вся длина спирального корпуса 41, составляющего узел 40 ходового винта, может быть конфигурирована более длинной, чем расстояние между спаренными передними и задними ведомыми роликами 20a и 20b конвейерного подвижного элемента 1, и спаренные передние и задние ведомые ролики 20a и 20b могут быть конфигурированы для приема осевого усилия одновременно от одного спирального корпуса 41. Когда скорость движения конвейерного подвижного элемента 1 не должна изменяться в пределах одной секции винтового привода, спаренные передние и задние ведомые ролики 20a и 20b также могут быть конфигурированы для перекрытия двух переднего и заднего спиральных корпусов 41, смежных в направлении движения и приема осевого усилия одновременно от переднего и заднего спиральных корпусов 41. Кроме того, в этот момент, когда вся длина одной секции винтового привода относительно короткая и может быть составлена единственным непрерывным спиральным корпусом 41, может применяться один узел ведомого ролика для одного узла конвейерного подвижного элемента 1.
При взгляде на конвейерный подвижный элемент 1 спереди ходовой винт 37 удерживается внутри одного из пространств нижних левого и правого внутренних углов между стойками 23a и 23b и рычажными элементами 29 и 30, находясь вблизи стоек 29 и 30 и опорной балки 4, как показано на фиг.4A. В этот момент ходовой винт 37 может быть расположен таким образом, что центральная осевая выносная линия ведомого ролика 20a или 20b на стороне конвейерного подвижного элемента 1 не пересекается с центральной осью ходового винта 37, но немного смещена к стороне направления вращения ходового винта 37 относительно центральной оси ходового винта 37. При такой конфигурации положение линейного контакта между одной из обеих боковых сторон спирального паза 41a, которая нажимает на ведомый ролик 20a или 20b, и окружной поверхностью ведомого ролика 20a или 20b может быть выровнено с центральной осью ходового винта 37 при взгляде в направлении центральной оси ведомого ролика 20a или 20b. Это может снижать трение между окружной поверхностью ведомого ролика 20a или 20b и боковой стороной спирального паза 41a ходового винта 37, так как направление движения боковой стороны, входящей в линейный контакт с окружной поверхностью, становится параллельным круговому направлению ведомого ролика 20a или 20b, что также предотвращает истирание боковой стороны спирального паза 41a ходового винта 37 и окружной поверхности ведомого ролика 20a или 20b.
Снабженный толкателем цепной конвейер 38, составляющий секцию цепного привода в линии движения конвейерного подвижного элемента 1, состоит из конвейерной цепи 45 и направляющего рельса 50, как показано на фиг.5 и фиг.6, который известен. Конвейерная цепь 45 состоит из собственно цепи, сформированной сцеплением центрального звена и пары верхней и нижней боковых звеньев вертикальными пальцами, и пары передних и задних передвижных элементов 46a и 46b, прикрепленных к паре переднего и заднего центральных звеньев, расположенных с соответствующими интервалами в направлении длины собственно цепи таким образом, чтобы они перемещались, по меньшей мере, вдоль горизонтальной кривой на линии. Толкатель 47 выступает от верхнего звена между спаренными передними и задними передвижными элементами 46a и 46b. Направляющий рельс 50 состоит из пары левого и правого обращенных друг к другу желобчатых рельсов 49a и 49b, несущих и направляющих левый и правый промежуточные ролики 48, с возможностью поворота удерживаемых нижними концами передвижных элементов 46a и 46b при помощи горизонтальных осей. На нижней стороне переднего несущего передвижного элемента 5 основного корпуса 2 конвейерного подвижного элемента 1 расположены передний зацепляющийся элемент 5а, толкаемый толкателем 47, и стопор 5b обратного хода, расположенный сзади от толкателя 47 и предотвращающий движение назад переднего несущего передвижного элемента 5 от толкателя 47. Зацепляющийся элемент 5a и стопор 5b обратного хода известны и с возможностью поворота удерживаются таким образом, что они могут только качаться и падать к стороне взаимодействующей части из активного положения нахождения между ними толкателя 47 спереди и сзади, как показано на фиг.5. Толкатель 47, приближающийся сзади, может вызывать падение стопора 5b обратного хода и затем входить между стопором обратного хода 5b и входящим в зацепление элементом 5a.
Конвейерная цепь 45 удерживается направляющим рельсом 50 таким образом, что толкатель 47 линейно движется в положениях непосредственно под несущими передвижными элементами 5 и 6 на стороне конвейерного подвижного элемента 1 в секции цепной передачи. Конвейерная цепь 45 натянута между ведущим зубчатым колесом с приводом от электродвигателя и холостым зубчатым колесом, как уже известно, и приводится таким образом, что толкатель 47 движется в заданном направлении с заданной скоростью. Зацепляющийся элемент 5a переднего несущего передвижного элемента 5 конвейерного подвижного элемента 1, поданный в секцию цепного привода, толкается толкателем 47, автоматически установленным между зацепляющимся элементом 5a и стопором 5b обратного хода сзади, посредством чего конвейерный подвижный элемент 1 движется вперед с такой же скоростью, как и конвейерная цепь 45. Кроме того, на конце секции цепного привода толкатель 47 поворачивается в поперечном направлении по горизонтальной кривой конвейерной цепи 45 и автоматически выходит из промежутка между зацепляющимся элементом 5a и стопором 5b обратного хода на стороне конвейерного подвижного элемента 1, после чего конвейерный подвижный элемент 1 останавливается в по существу зафиксированном положении. Остановленный конвейерный подвижный элемент 1 может быть выведен из конвейерной секции с цепным приводом благодаря конфигурации, в которой второй зацепляющийся элемент, выступающий на нижней стороне заднего несущего передвижного элемента 6, толкается следующим толкателем 47.
Средство 39 фрикционного привода в секции фрикционного привода включает колесо 51 фрикционного привода, входящее в прижимной контакт с одной из поверхностей 4a и 4b фрикционного привода на обеих боковых сторонах опорной балки 4, составляющей основной корпус 2 конвейерного подвижного элемента 1, например поверхностью 4a фрикционного привода, и приводной двигатель 52 для приведения во вращение колеса 51 фрикционного привода, как показано на фиг.7-9. Колесо 51 фрикционного привода и приводной двигатель 52 с возможностью горизонтального поворота удерживаются на вертикальной оси 54 относительно неподвижной рамы 53 и также удерживаются подвижной рамой 56, смещенной в направлении приближения к поверхности 4a фрикционного привода опорной балки 4 спиральной пружиной 55 сжатия, взаимодействующей с неподвижной рамой 53, благодаря чему колесо 51 фрикционного привода входит в прижимной контакт с поверхностью 4a фрикционного привода опорной балки 4. Средство фрикционного привода может включать упорный ролик, который находится между опорной балкой 4 и колесом 51 фрикционного привода.
Указанное выше средство 39 фрикционного привода расположено с соответствующими интервалами в направлении линии движения внутри секции фрикционного привода. Как уже известно, средство 39 фрикционного привода может быть расположено только на входе и на выходе секции фрикционного привода, и множество конвейерных подвижных элементов 1 может приводиться в действие для движения с фиксированной скоростью встык друг с другом в секции фрикционного привода. В альтернативном варианте средства 39 фрикционного привода могут быть расположены с равномерными интервалами немного короче всей длины опорной балки 4, и конвейерные подвижные элементы 1 могут приводиться в движение с фиксированной скоростью с сохранением фиксированных интервалов.
Следует отметить, что секция винтового привода, секция цепного привода и секция фрикционного привода могут быть расположены в комбинации в любом надлежащем порядке для образования циркуляционной линии движения конвейерного подвижного элемента 1. Однако совместно может использоваться соответствующее средство, если конвейерный подвижный элемент 1, поданный из предшествующей секции привода, не может быть принят ровно и надежно последующей секцией привода (такой как ходовой винт 37, снабженный толкателем цепной конвейер 38 или средство 39 фрикционного привода) или должен быть принят средствами привода последующей секции привода с заданной синхронизацией.
Кроме того, секция фрикционного привода, где конвейерный подвижный элемент 1 с использованием трения приводится средством 39 фрикционного привода при помощи опорной балки 4, не является существенным в конвейерном устройстве, соответствующем настоящему изобретению. Однако ведомые ролики 20a и 20b, используемые в секции винтового привода, расположены выше, чем поперечное положение опорной балки 4, таким образом, что секция фрикционного привода, где конвейерный подвижный элемент 1 с использованием трения приводится средством 39 фрикционного привода при помощи опорной балки 4, может быть скомбинирована, как в описанном выше варианте осуществления изобретения. Кроме того, удерживающий элемент для ведомого ролика с нижним концом, на котором ведомый ролик 20a или 20b, используемый в секции винтового привода, удерживается с возможностью поворота, не выступает вниз от положения, поперечно смещенного от центральной линии несущего основания 3 для транспортируемого объекта. Таким образом, как показано на каждом чертеже, возможны следующие конфигурации: настил 57 уложен между основным корпусом 2 конвейерного подвижного элемента 1 и несущим основанием 3 для транспортируемого объекта выше направляющих роликов 31 и 32 поперечной устойчивости, и стойки 23 и 24, соединяющие основной корпус 2 конвейерного подвижного элемента 1 и несущее основание 3 для транспортируемого объекта, и верхние стойки 60 несущих элементов 24a и 24b для ведомых роликов движутся с проникновением по вертикали сквозь щелевое отверстие 58, сформированное в настиле 57 вдоль линии движения конвейерного подвижного элемента 1, благодаря чему основной корпус 2 конвейерного подвижного элемента 1 движется внутри проходящего под настилом пространства, и несущее основание 3 для транспортируемого объекта движется в рабочем пространстве над настилом.
Промышленное применение
Конвейерное устройство с использованием конвейерного подвижного элемента, соответствующего настоящему изобретению, может использоваться на линиях окраски и сушки автомобильных корпусов при надлежащем комбинировании секции винтового привода, способной изменять шаг транспортировки, секции цепного привода, имеющей отличную термостойкость, и секции фрикционного привода, пригодной для движения и привода с высокой скоростью.
Описание ссылочных позиций
1 - Конвейерный подвижный элемент
2 - Основной корпус
3 - Несущее основание для транспортируемого объекта
4 - Опорная балка
5, 6 - Несущий передвижной элемент
7, 8 - Направляющий передвижной элемент
9, 14, 15 - Элемент опорной балки
11, 12 - Соединительный элемент
18, 21 - Опорное колесо
19, 22 - Ролик поперечной устойчивости
20a, 20b - Ведомый ролик
23a, 23b - Стойка
24a, 24b - Удерживающий элемент для ведомого ролика
31, 32 - Направляющий ролик поперечной устойчивости
34 - Опорный направляющий рельс
36 - Направляющий рельс поперечной устойчивости
37 - Ходовой винт
38 - Снабженный толкателем цепной конвейер
39 - Средство фрикционного привода
40 - Узел ходового винта
41 - Спиральный корпус
42 - Корпус вала
43a, 43b - Подшипник
44 - Соединение вала
45 - Конвейерная цепь
46a, 46b - Передвижной элемент конвейерной цепи
47 - Толкатель
48 - Опорный ролик
51 - Колесо фрикционного привода
52 - Приводной двигатель
55 - Спиральная пружина сжатия
56 - Подвижная рама
57 - Настил
58 - Щелевое отверстие
60 - Верхняя стойка удерживающего элемента для ведомого ролика
61 - Нижний рычаг удерживающего элемента для ведомого ролика
W - Транспортируемый объект (автомобильный корпус)








Конвейерное устройство содержит подвижный элемент (1), содержащий ведомый ролик (20a), входящий в зацепление с ходовым винтом (37), и зацепляющийся элемент (5a), входящий в зацепление с толкателем (47) цепного конвейера (38). Зацепляющийся элемент выступает на нижней стороне одного из переднего и заднего передвижных элементов (5, 6) конвейерного подвижного элемента. Несущее основание (3) для транспортируемого объекта, удерживаемое при помощи вертикальных стоек (23a, 23b) обоих передвижных элементов, снабжено несущим элементом (24a) для ведомого ролика, состоящим из верхней стойки (60), отступающей вниз на центральной продольной линии, проходящей вертикальные стойки, и нижним рычагом (61), проходящим в боковую сторону от нижнего конца верхней стойки. Ведомый ролик, входящий в зацепление с ходовым винтом в секции винтового привода, с возможностью поворота удерживается нижним рычагом в положении выше бокового положения опорной балки (4), соединяющей оба передвижных элемента. Обеспечивается возможность привода одного и того же подвижного элемента от ходового винта и цепного конвейера. 3 з.п. ф-лы, 10 ил.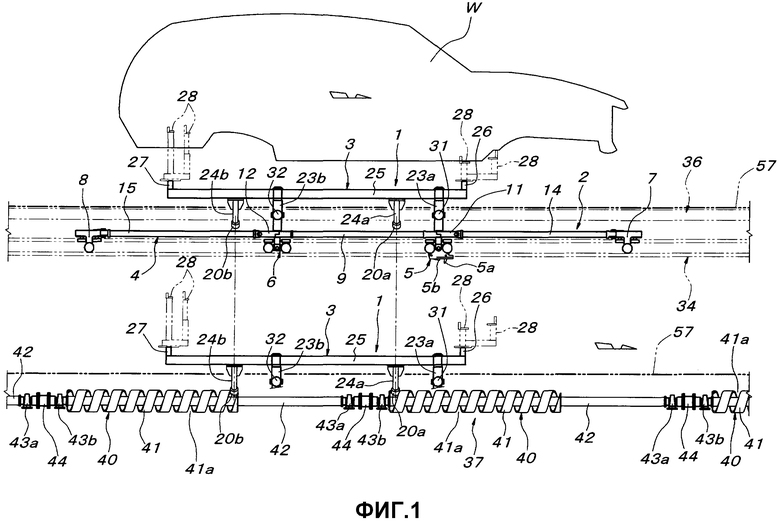
1. Конвейерное устройство с использованием конвейерного подвижного элемента (1), снабженного ведомым роликом (20a), входящим в зацепление с ходовым винтом (37), удерживаемым вдоль секции винтового привода линии движения, и зацепляющимся элементом (5a), входящим в зацепление с толкателем (47) цепного конвейера (38), натянутого вдоль секции цепного привода линии движения, причем конвейерный подвижный элемент (1) содержит:
по меньшей мере, передний и задний передвижные элементы (5 и 6);
опорную балку (4), соединяющую друг с другом передний и задний передвижные элементы (5 и 6);
вертикальные стойки (23a и 23b), поддерживаемые передним и задним передвижными элементами (5 и 6) соответственно; и
несущее основание (3) для транспортируемого объекта, поддерживаемое передней и задней вертикальными стойками (23a и 23b),
причем зацепляющийся элемент (5a) выступает на нижней стороне, по меньшей мере, одного (5) из переднего и заднего передвижных элементов (5 и 6); несущее основание (3) для транспортируемого объекта снабжено несущим элементом (24a) для ведомого ролика, имеющим верхнюю стойку (60), выступающую вниз на центральной продольной линии, проходящей переднюю и заднюю вертикальные стойки (23a и 23b), и нижним рычагом (61), проходящим в боковую сторону от нижнего конца верхней стойки (60); и ведомый ролик (20a) удерживается с возможностью поворота нижним рычагом (61) удерживающего элемента (24a) для ведомого ролика и также расположен выше бокового положения опорной балки (4).
2. Конвейерное устройство с использованием конвейерного подвижного элемента по п.1, в котором нижний рычаг (61) удерживающего элемента (24a) для ведомого ролика наклонен вниз от верхней стойки (60) и ведомый ролик (20a) с возможностью поворота удерживается таким образом, что его аксиальный центр наклонен параллельно наклонному направлению вниз нижнего рычага (61).
3. Конвейерное устройство с использованием конвейерного подвижного элемента по п.1, в котором удерживающий элемент (24a или 24b) для ведомого ролика, имеющий нижний рычаг (61), с возможностью поворота удерживающий ведомый ролик (20a или 20b), расположен в передней и задней паре на центральной продольной линии, проходящей переднюю и заднюю вертикальные стойки (23a и 23b).
4. Конвейерное устройство с использованием конвейерного подвижного элемента по п.1, в котором передняя и задняя вертикальные стойки (23a и 23b) и верхняя стойка (60) удерживающего элемента (24a) для ведомого ролика выполнены с возможностью движения с проникновением по вертикали сквозь щелевое отверстие (58), выполненное в настиле (57), установленном таким образом, что он находится по вертикали между пространством, где движется несущее основание (3) для транспортируемого объекта, и пространством, где движутся передвижные элементы (5 и 6) и опорная балка (4).
| US 20100000843 A1, 07.01.2010; | |||
| US 7201105 B2, 10.04.2007 | |||
| US 5318167 A1, 07.06.1994 | |||
| US 4691640 A1, 08.09.1987 |

