Изобретение относится к области общего машиностроения, в частности к системам управления колесных машин.
Из уровня техники известны следящие электрогидравлические системы управления (RU 2305210, дата публикации 27.08.2007, F15B 9/09; RU 2305211, дата публикации 27.08.2007, F15B 9/09), содержащие нереверсивный нерегулируемый насос, электронные управляющие блоки и блоки усиления, электродвигатель постоянного тока, золотниковый клапан реверса, электрогидравлический усилитель, гидроцилиндр, вспомогательные и предохранительные гидравлические устройства. Конструктивные особенности известных решений не обеспечивают надежную работу устройств.
Известен привод, содержащий реле включения цепи управления, двухполупериодный выпрямитель, сумматоры, блок управления электродвигателем, компараторы, управляемый электродвигатель постоянного тока, нерегулируемый нереверсивный насос, гидравлический бак, четырехлинейный трехпозиционный электрогидравлический распределитель с пружинным центрированием, исполнительный механизм, другие гидравлические, электрогидравлические и электрические элементы (RU №2378539, МПК: F15B 9/09, 2010). Недостатками этого привода являются:
- несовпадение минимального числа оборотов электродвигателя, которое гарантирует его надежную работу в пусковом режиме и надежную работу насоса, с абсолютным значением минимальных сигналов срабатывания компараторов в цепях управления электрогидравлического распределителя, что приводит к уменьшению диапазона регулирования скорости выходного звена исполнительного механизма и нестабильности коэффициента передачи по цепи управления скоростью вращения выходного вала электродвигателя;
- подключение одной из гидравлических полостей исполнительного механизма привода при перемещении золотника электрогидравлического распределителя в крайнее положение к сливной магистрали, соединенной с атмосферой, что уменьшает гидравлическую жесткость привода и соответственно его собственную частоту. Данное решение принято за прототип.
Техническим результатом при использовании полезной модели является создание автономного электрогидравлического следящего привода, лишенного указанных недостатков.
В предлагаемом приводе, с целью устранения указанных недостатков, между выходом двухполупериодного выпрямителя и сумматором, на вход которого подается положительный сигнал смещения, включены последовательно сумматор, на вход которого подается отрицательный сигнал смещения, и однополупериодный выпрямитель, при этом абсолютное значение сигналов смещения равно абсолютным значениям сигналов срабатывания компараторов и соответствует минимальному числу оборотов вала электродвигателя, гарантирующему надежную работу электродвигателя в пусковом режиме и надежную работу насоса.
Поставленная задача решается также тем, что сливная гидравлическая магистраль четырехлинейного трехпозиционного электрогидравлического распределителя с пружинным центрированием соединена с гидравлическим баком через предохранительный клапан, поддерживающий заданное давление в сливной магистрали.
Сущность изобретения поясняется чертежами:
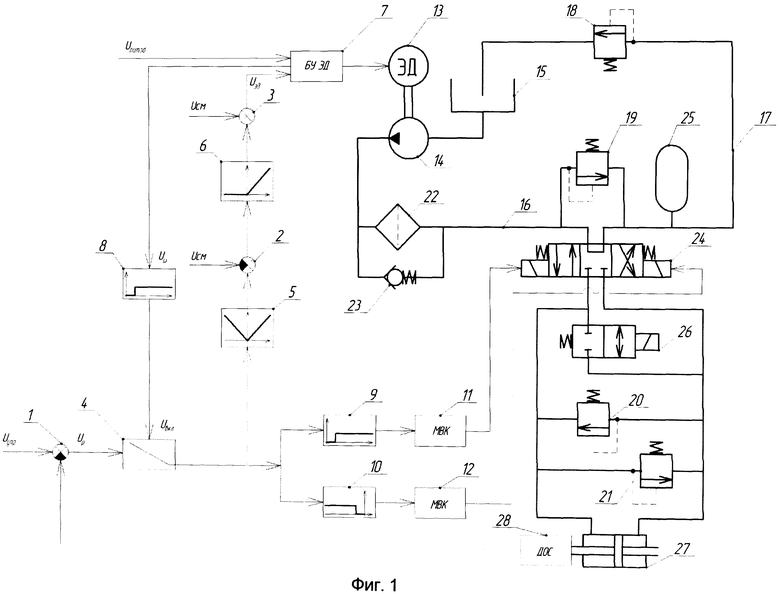
на фиг.1 показана принципиальная схема заявляемого автономного электрогидравлического следящего привода;
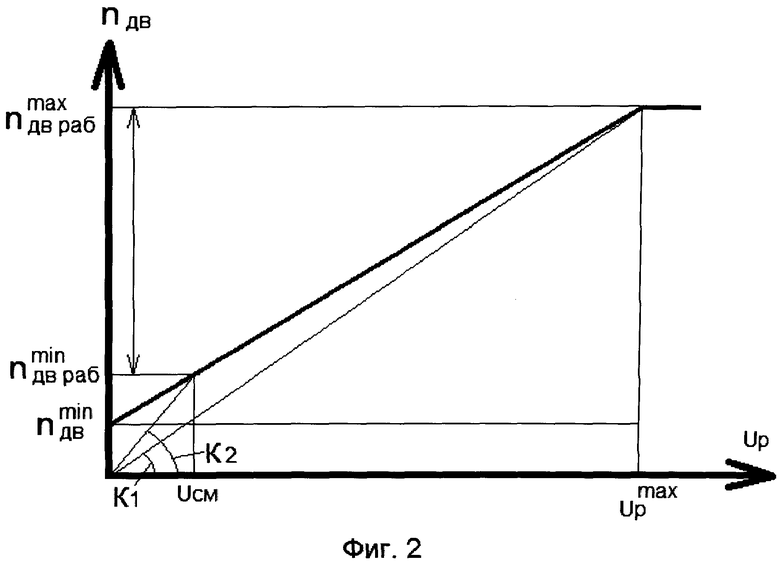
на фиг.2 приводится зависимость числа оборотов вала электродвигателя (nдв) от сигнала рассогласования (Up) для прототипа;
на фиг.3 приводится зависимость числа оборотов вала электродвигателя (nдв) от сигнала рассогласования (Up) для заявленного изобретения.
Автономный электрогидравлический следящий рулевой привод содержит сумматоры 1, 2 и 3, реле включения цепи управления 4, двухполупериодный выпрямитель 5, однополупериодный выпрямитель 6, блок управления электродвигателем 7, компараторы 8, 9 и 10, мощные выходные каскады 11 и 12, электродвигатель постоянного тока 13, выходной вал которого соединен с ротором нерегулируемого нереверсивного насоса 14, гидравлический бак 15, напорную гидравлическую магистраль 16, сливную гидравлическую магистраль 17, предохранительные клапаны 18, 19, 20, 21, гидравлический фильтр 22, обратный клапан 23, четырехлинейный трехпозиционный электрогидравлический распределитель с пружинным центрированием 24, гидравлический компенсатор 25, клапан кольцевания 26, исполнительный механизм 27, датчик обратной связи 28.
Привод работает следующим образом.
При включении привода реле 4 находится в разомкнутом состоянии, напряжение в обмотках четырехлинейного трехпозиционного электрогидравлического распределителя с пружинным центрированием 24 отсутствует, напорная 16 и сливная 17 гидравлические магистрали соединены между собой. При подаче питания на блок управления электродвигателем 7 выходной вал электродвигателя 13 и ротор насоса 14 начинают вращаться, и при достижении заданной величины оборотов двигателя 13 на выходе компаратора 8 возникает сигнал, замыкающий контакты реле 4. В результате управляющий сигнал рассогласования, равный по величине разности между сигналом управления на входе системы и сигналом обратной связи (Up=Uyпp -Uoc), через сумматор 1 поступает на входы двухполупериодного выпрямителя 5 и компараторов 9 и 10.
Модуль сигнала рассогласования Up на выходе двухполупериодного выпрямителя 5 суммируется в сумматоре 2 с постоянным отрицательным сигналом смещения -Uсм, равным по абсолютной величине абсолютным значениям величины сигналов срабатывания компараторов 9, 10 и соответствующим минимальному числу оборотов вала электродвигателя, гарантирующему надежную работу электродвигателя в пусковом режиме 
В зависимости от знака управляющего сигнала на выходе одного из компараторов 9 или 10 формируется команда, которая через мощный выходной каскад 11 или 12 поступает на одну из обмоток электрогидравлического распределителя с пружинным центрированием 24, золотник которого перемещается в одно из крайних положений, соединяя одну из полостей исполнительного механизма 27 с напорной гидравлической магистралью 16, а другую - со сливной гидравлической магистралью 17.
Рабочая жидкость с выхода насоса 14 по напорной гидравлической магистрали 16 через гидравлический фильтр 22 поступает в полость исполнительного механизма 27, из другой полости исполнительного механизма 27 рабочая жидкость вытесняется в сливную гидравлическую магистраль 17 и через предохранительный клапан 18, поддерживающий заданное давление в сливной гидравлической магистрали 17, поступает в гидравлический бак 15. Выходное звено исполнительного механизма 27 перемещается, датчик обратной связи 28 измеряет это перемещение и формирует сигнал обратной связи Uoc, поступающий в сумматор 1, где вычитается из управляющего сигнала Uупр.
Сигнал рассогласования уменьшается, и при равенстве его абсолютного значения величине Uсм золотник электрогидравлического распределителя 24 перемещается в среднее положение, соединяя нагнетательную 16 и сливную 17 гидравлические магистрали между собой, а электродвигатель 13 и ротор насоса 14 продолжают вращаться с числом оборотов, соответствующим величине Uсм.
Таким образом, выходное звено исполнительного механизма 27 перемещается в положение, соответствующее сигналу управления Uупр со скоростью, пропорциональной величине сигнала рассогласования Up.
Гидравлический компенсатор 25 предназначен для сглаживания пульсаций в сливной магистрали 17. В качестве гидравлического компенсатора может использоваться гидравлический аккумулятор, сильфон и т.д.
Предохранительный клапан 19 предназначен для ограничения максимального давления, развиваемого насосом.
Перепускной клапан 23 предназначен для поступления гидравлической жидкости в исполнительный механизм 21 в обход гидравлического фильтра 22 при его засорении.
Предохранительные клапаны 20 и 21 предназначены для смягчения гидравлических ударов, которые могут возникнуть в нештатных ситуациях.
Фиг.2 и Фиг.3 позволяют сравнить и наглядно проиллюстрировать преимущества предлагаемого решения в части цепи управления числом оборотов вала электродвигателя. На фиг.2 приводится зависимость числа оборотов вала электродвигателя (nдв) от сигнала рассогласования (Up) для прототипа, на фиг.3 - для предлагаемого изобретения. Из рассмотрения фиг.2 следует, что минимальное число оборотов электродвигателя 



| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2008 |
|
RU2378539C1 |
| Электрогидравлическая система усиления рулевого управления транспортного средства и способ управления электрогидравлической системой усиления рулевого управления транспортного средства | 2022 |
|
RU2792310C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2560216C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНЫМ КОЛЬЦОМ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2017 |
|
RU2748156C1 |
| Многоканальная электрогидравлическая система | 1989 |
|
SU1707289A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969594A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТНЫМ КОЛЬЦОМ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2017 |
|
RU2667418C1 |
| Электрогидравлическая система совмещенного управления | 1988 |
|
SU1548363A1 |
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |
| Устройство для автоматического регулирования давления жидкости в камере | 2020 |
|
RU2755839C1 |

Изобретение относится к области общего машиностроения, в частности к системам управления колесных машин. Привод содержит реле включения цепи управления, двухполупериодный выпрямитель, сумматоры, блок управления электродвигателем, компараторы, управляемый электродвигатель постоянного тока, нерегулируемый нереверсивный насос, гидравлический бак, четырехлинейный трехпозиционный электрогидравлический распределитель с пружинным центрированием, исполнительный механизм, при этом между выходом двухполупериодного выпрямителя и сумматором, на вход которого подается положительный сигнал смещения, включены последовательно сумматор, на вход которого подается отрицательный сигнал смещения, и однополупериодный выпрямитель, абсолютное значение сигналов смещения равно абсолютным значениям минимальных сигналов срабатывания компараторов. Технический результат - надежная работа насоса и электродвигателя в пусковом режиме. 1 з.п. ф-лы, 3 ил.
1. Автономный электрогидравлический следящий привод, содержащий реле включения цепи управления, двухполупериодный выпрямитель, сумматоры, блок управления электродвигателем, компараторы, управляемый электродвигатель постоянного тока, нерегулируемый нереверсивный насос, гидравлический бак, четырехлинейный трехпозиционный электрогидравлический распределитель с пружинным центрированием, исполнительный механизм, отличающийся тем, что между выходом двухполупериодного выпрямителя и сумматором, на вход которого подается положительный сигнал смещения, включены последовательно сумматор, на вход которого подается отрицательный сигнал смещения, и однополупериодный выпрямитель, при этом абсолютное значение сигналов смещения равно абсолютным значениям сигналов срабатывания компараторов.
2. Автономный электрогидравлический рулевой привод по п.1, отличающийся тем, что сливная гидравлическая магистраль четырехлинейного трехпозиционного электрогидравлического распределителя с пружинным центрированием соединена с гидравлическим баком через предохранительный клапан, поддерживающий заданное давление в сливной магистрали.
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2008 |
|
RU2378539C1 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305210C2 |
| АВТОНОМНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ СКОРОСТИ ВЫХОДНОГО ЗВЕНА | 2005 |
|
RU2305211C2 |
| US 6092618 B2, 25.06.2000 | |||
| US 20080236156 A1, 02.10.200 | |||

