максимальный сигнал, а регулятор 2 устанавливает минимальное давление в гидролинии 15 насоса 1. Когда управляющий сигнал задатчика скорости на пходе вычислительного устройства больше порога срабатывания компараторов, распределитель открывается, а на выходе сумматора устанавливается сигнал датчика 16 (17) давления сливной полости гидродригателя 22 Блок 3 выбира-i минимальную из величин
давлений сливных полостей гидродвигателей 22-24. воздействует на интегратор 5 в направлении изменения давления для уменьшения рассогласования между этой минимальной величиной и ее заданным значением до нуля. Тем самым поддерживается постоянный перепад давления на сливной кромке наиболее загруженного гидродвигателя приводов 6-8.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая система совмещенного управления | 1988 |
|
SU1548363A1 |
| Электрогидравлическая система совмещенного управления | 1987 |
|
SU1643814A1 |
| Электрогидравлическая система управления | 2016 |
|
RU2641192C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1987 |
|
SU1512244A3 |
| Электрогидравлическая система совмещенного управления строительной машиной | 1987 |
|
SU1502728A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
| Ресурсный стенд для испытаний гидрорулей | 1986 |
|
SU1372214A1 |
| Способ испытаний гидроприводов и устройство для его осуществления | 1991 |
|
SU1793111A1 |
| Устройство для управления дискретным приводом | 1980 |
|
SU930245A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ КОНТРОЛИРУЕМОГО ПАРАМЕТРА ВЫХОДНОГО ЗВЕНА ГИДРОДВИГАТЕЛЯ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2001 |
|
RU2206804C2 |
Изобретение относится к гидроавтоматике и может быть использовано в конструкциях дорожно-строительных машин и строительных манипуляторов. Целью изобретения является повышение КПД и устой- чивости, Если управляющие сигналы задатчика скорости всех приводов 6-8 не превышают порога срабатывания компараторов, то на выходе блока 3 устанавливается
Изобретение относится к гидроавтоматике и может быть использовано в конструкциях дорожно-ст роител ьных машин и строительных манипуляторов.
Целью изобретения является повышение КПД и устойчивости.
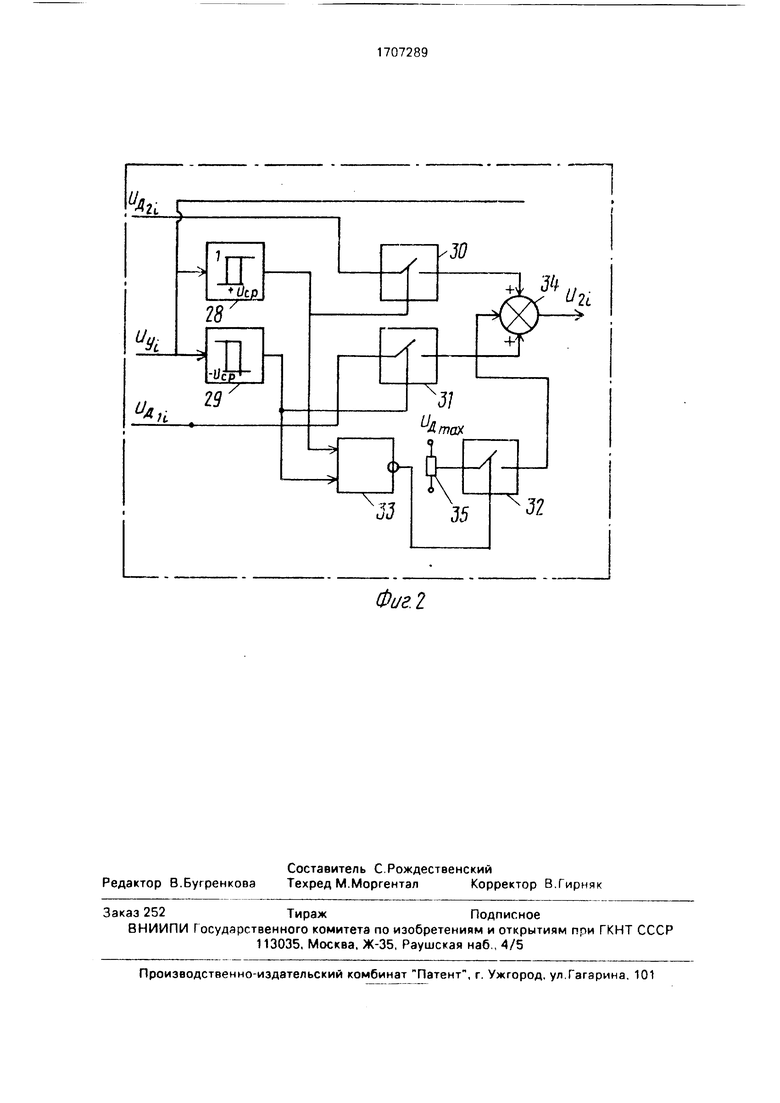
На фиг.1 изображена принципиальная схема многоканальной электрогидравличе- ской системы; на фиг 2 схема блока выборки уровня давления.
Система содержит общую насосную установку с идиосом 1. электрогидравлический регулятор 2 давления насосной установки с устройством управления на входе, включающим последовательно соединенные блок 3 определения минимального сигнала, элемента 4 сравнения сигнала U2i с заданным значением 11дз перепада на сливной кромке и интегратор 5 на выходе элемента 4, а также, например, три исполнительных электрогидравлических привода 68, включающих электронны-; усилители 9-11. четырехлинейные трехпозиционные распределители 12-14 с электрическим управлением, подключенные входными гидролиниями (не показаны) к гидролинии 15 нагнетания насоса 1 и к сливу, а выходными гидролиниями (не показаны), в которых установлены датчики 16-21 давления, - к гидродвигателям 22-24 соответственно. Вычислительные устройства 25-27 приводов 7-8 соединены входами с задат- чиком скорости (не показан) гидродвигателей 22-24 и датчиками 16-21, а выходами через усилители 9-11 - с управляющими входами распределителей 12-14. Устройства 25-27 снабжены блоками выборки уровня давления, каждый и последних выполнен в виде пороговых элементов, например компараторов 28 v. 29, управляемых аналоговых ключей 30-32, логического элемента ИЛИ-НЕ 33, задзтчикэ 34 сброса давления и сумматора 35. При этом задатчик скорости подключен к входам пороговых
элементов 28 и 29, выходы которых соединены с входами элемента ИЛИ-НЕ 33 и с управляющими входами ключей 30 и 31 ра- Оочие входы которых соединены, например.
с датчиками 16 и 17. а выходы - с двумя входами сумматора 35. выход последнего подключен к блоку 3, а третий вход соединен с выходом третьего ключа 32, рабочий вход которого соединен с задатчиком 34
сброса давления, а управляющий вход - с выходом элемента ИЛИ-НЕ 33 Подпиточ- ные клапаны (не показаны) подключены входами к гидролинии 36 подпитки, а выходами - к полостям (не показаны) гидродвигателей
22-24.
Система работает следующим образом. При отсутствии i-ro управляющего сигнала Uyi от задатчика скорости или в случае если его абсолютное значение не превышает порога срабатывания UCp, т.е. при U Ucp, выходные сигналы вычислительного устройства 25 (26 и 27) составляют Uv, 0, .ъ --- Кдмакс. При этом распределитель 12(13,14) находится в нейтральном положении и пол ости гидродвигателя 22(23,24) заперты Если управляющие сигналы задатчика скорости всех приводов не превышают порога срабатывания UCp элементов 28 и 29, то на выходе блока 3 определения устанавливается сигнал идмакс- Так как этот сигнал приходит на отрицательный вход элемента 4 сравнения и по абсолютной величине заведомо больше величины заданного уровня давления 1)дз на сливной
кромке, то на входе интегратора 5 устанавливается отрицательный сигнал, изменяющий его выходной сигнал в сторону уменьшения до нуля, а следовательно, путем воздействия на регулятор 2, устанавливающий минимальное давление в гидролинии 15.
В случае, если управляющий сигнал Uyi задатчика скорости н входе вычислительного устройства 25 превосходит порог срабатывания Ucp и положителен (Uyi Игр) рапределитель 12 открывает проходные сечения, а на выходе сумматора 34 вычислительного устройства 25 устанавливается сигнал иД2 датчика 16 (17) давления сливной полости гидродвигателя 22. При изменении полярности управляющего сигнала (Uyi - Ucp) и изменении сливной кромки на том же выходе также устанавливается сигнал иди давления на сливной кромке. Блок 3, выбирая минимальную из этих величин мин (U2i) и сравнивая ее с заданной величиной давления ид:3. воздействует на интегратор 5 и регулятор 2 в сторону изменения давления до уменьшения рассогласования между мин () и Ь дз до нуля. Тем самым поддерживается постоянный перепад давления на сливной кромке наиболее нагруженного гидродвигателя 22(23,24) и соответствующая загрузка насоса. В гидролинии 15 устанавливается сумма перепада давления нагрузки и перепадов на обоих кромках распределителя 12.
При этом величина сигнала на выходе сумматора 34 каждого вычислительного устройства (25-27) связана с величинами входных сигналов следующей зависимостью
|ид2, при Uy
U,
-р
U2i - иД1 при Uv. UrP .
идмт-г ПРИ Uy Ucp
где U2i - величина сигнала на выходе сумматора 34 i-ro вычислительного устройства.
Uyi - величина i-ro управляющего сигнала, положительное значение которого (Uyi 0) создает смещение распределителя (12-14) в сторону, соответствующую соединению гидролинии 15 часоснои станции с одной полостью гидродвигателя (22 - 24), а другой полости со сливом (при Uy 0-- наоборот),
UCp - порог срабатывания по управляющему сигналу;
Уди и Ufl2i величины сигналов на выходах датчиков давления, подключенных к полостям 1-го гидродвигателя (22-24),
идмакс - величина, задающая принудительный сброс давления в гидролинии 15 при нейтральном положении всех распределителей 12-14.
Изменение сигнала Un на выходе вычислительного устройства 25,соединенном усилителем 9, обеспечивает увеличение (или уменьшение проходного сечения распределителя 12 при соответствующем
уменьшении (или увеличении) n ;pe;i Л дч; - ления из его сливной кромке 7°м г.ам...; компенсируйся зависимость . О с. перепада давления Ар г °. обгтпгчи.мг. независимые от рь/ ичмны и и скорость гидродвигателя 22
На выходе сумматора 34 пычяслитп/и, ного устройства 25 выбирается cnri-;v датчика 16(17) давления, подкл (Опекун- о к
СЛИЗНОЙ ПОЛОС И Г ИДРОД8И 3 ЛЯ 22 ГОТ ТЛС- НС алгоритму U2i Ufl2i npi; Jv U,-|-. и Ь U/(ii при Uyi UCp при упт- вляющем сит нале, превосходящем по модулю норо. срабатывания Ucp. либо сигнал U..-,.:.-. О ЧЧ1 депяюший максимальное давлении в о гто ме при управляющем г.иммле в порога срабатывания. Далее минимальный из этих сигналов сравнивается с cm пятом идл. определяющим заданный уровень дя;; ления на сливной кромче распределтелч 12.
Поскольку давпомие н;; оливе близ«тт к нулю, можно считан, что перепад дар л т ныя н c.niiiuioi кромке равен давтс -м-но Е rinis мои полости сотзегг.т пующего 1идродпиг, тепя ми ним а.чьи мм из си г на ПОР д;и лений на кромке Н1- ;1 е заданного VpOHHti TO ПаССОГ VlCORPHi-::.; ПОЛОжигельнг::й 3t-: .i инт -грато| 5 выходной сигнал до ex пер par.conmсопание не ттра ;и|гя Лнапо ччн мй поп
цег.с происходит при. отрица лтл пм лна...:
рассогласования.
Сигналь1 с суммл О ,-;г-. . нк1- )л,нь1/ ус-тоо С1 в } 1 -по-: -; ; : -ре. ., леи. 3. ;jr: ре де ( о .е н
П Др Г: ИИИ 15 HaCOC i . -. iO,-- ПН1. liC 1 Vri рЯ.ПП Т ОЧ - СИГН 1 Л bi И П.П :R 6 И 7 Н.ЭХП; : ся в пределах пс-рС 1 ) , г.е.
I Uji i - U-.;i. я дсих;1 - 118 ги лродвигатрл-- 24
прмродов осу1.цестм ротся с о рипнте.т.змой.
nOnViHCll НПГО . ЗКОМ, ТО Дг1В Н:н1 Р i лрплинин iь усг-тнавливоето- на минимаг;.- сом
ОС 1 (;4liOM ypOHHP. Рои гГЛ Д 1-з ,r: -4O
или нескольких приводов эти /СЛОЕНЧС не обеспечиваются и движение; их гидродвигателей происходите положи:ельнгй Т ./рмо- зящей нагрузкой, то в гидполинии 15 устанавливается максимальное длмление
для движения наиболее гидродвигателя с учетом величины Л Pi минимального требуемого перепада ;. пвления на рабочих кромках распределителя Тем самым обеспечивается мин;1млг м:п допустимые потери из дроссслирогамие.
Величины U2i, идЗ, ия представлены в виде напряжении, л.-По в аналоговой или цифровое юс.щ.
В вычислительном устройстве 25 (26,27) зависимость между сигналом на выходе Un, соединенном с усилителем 9(10,11) и входными сигналами управления Uyi и давления иди, 11д21 компенсирует изменение давления в гидролинии 15, обеспечивая постоянный расход через распределитель 12 (13,14) и постоянную скорость гидродвигателя 22 (23,24) при постоянной величине управляющего сигнала Uyi за датчика скорости.
Зависимость между сигналом Uzi на выходе сумматора 34 вычислительного устройства 25 (26.27) и входными сигналами Uyi, идц, 1)д21 обеспечивает разгрузку насоса 1 при нахождении всех управляющих сигналах в пределах зоны срабатывания и загрузку по наиболее нагруженному гидродвигателю 22 (23,24) путем последующего выбора минимального из сигналов датчиков 16-21 давления на сливных кромках распределителей 12-14.
Формула изобретения Многоканальная электрогидравлическая система, содержащая общую насосную установку, электрогидравлический регулятор давления насосной установки с устройством управления на входе, включающим последовательно соединенные блок определения минимального сигнала и элемент сравнения сигнала с заданным значением перепада на сливной кромке, а также исполнительные электрогидравлические приводы, каждый из которых включает в себя г
электронный усилитель и четырехлинейный трехпозиционный распределитель с электрическим управлением, подключенный входными гидролиниями к насосной установке и сливу, а выходными гидролиниями, в каждой из которых установлен датчик давления, - к гидродвигателю, а также вычисли- тельное устройство, входы которого связаны с задатчиком скорости гидродвигателя и датчиками давления последнего, а выход через электронный усилитель - с управляющим входом распределителя, отличающаяся тем, что, с целью повышения КПД и устойчивости, устройство управления
снабжено интегратором, установленным на
выходе элемента сравнения, а каждое вычислительное устройство - блоком выборки
уровня давления, выполненным в виде двух
пороговых элементов, трех управляемых
аналоговых ключей, логического элемента ИЛИ-НЕ, задатчика сброса давления и сумматора, причем зэдатчик скорости подключен к входам пороговых элементов, выходы которых соединены с входами элемента
ИЛИ-НЕ и с управляющими входами двух ключей, рабочие входы которых соединены с датчиками давления, а выходы - с двумя входами сумматора, выход последнего подключен к блоку определения минимального
значения сигнала, а третий вход соединен с выходом третьего ключа, рабочий вход которого соединен с задатчиком сиг нала сброса давления, а управляющий вход - с выходом элемента ИЛИ-НЕ.
Фи г. 1
| Способ регулирования давления питания многозвенного гидравлического привода | 1989 |
|
SU1645660A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
