Изобретение относится у судостроению, в частности к гидравлическим рулевым машинам.
Известна гидравлическая рулевая машина, содержащая силовой исполнительный механизм с группой камер, связанный гидравлическими магистралями с насосом и распределителем с электромагнитным управлением, устройство управления последним, включающее блок питания, задерживающие цепочки и тиристорные переключающие блоки постоянного тока с тиристорами включения и выключения электромагнитов распределителя 1 .
Недостатками известной гидравлической рулевой машины являются низкие эксплуатационные качества вследствие малой скорости перекладки.руля, а также малая надежность работы.
Цель изобретения - улучшение эксплуатационных качеств гидравлической рулевой машины путем повышения скорости перекладки руля, а также повьш1ение надежности ее работы.
. Поставленная цель достигается тем, что в гидравлической рулевой машине устройство управления распре делителем содержит пороговый элемент перепада давления с двумя пропорциональными датчиками давления, входы которых подключены к упомянутым гидравлическим магистралям, связывающий силовой исполнительный механизм с насосом,.сумматор, двухполупериодный выпрямитель и два компаратора, при этом выходы датчиков давления через сумматор, двухполу10периодный вьтрямитель и компараторы связаны с входами задерживающихцепочек, а компараторы, сумматор и датчики давления подключены электрическими цепями к упомянутому блоку
15 питания. .
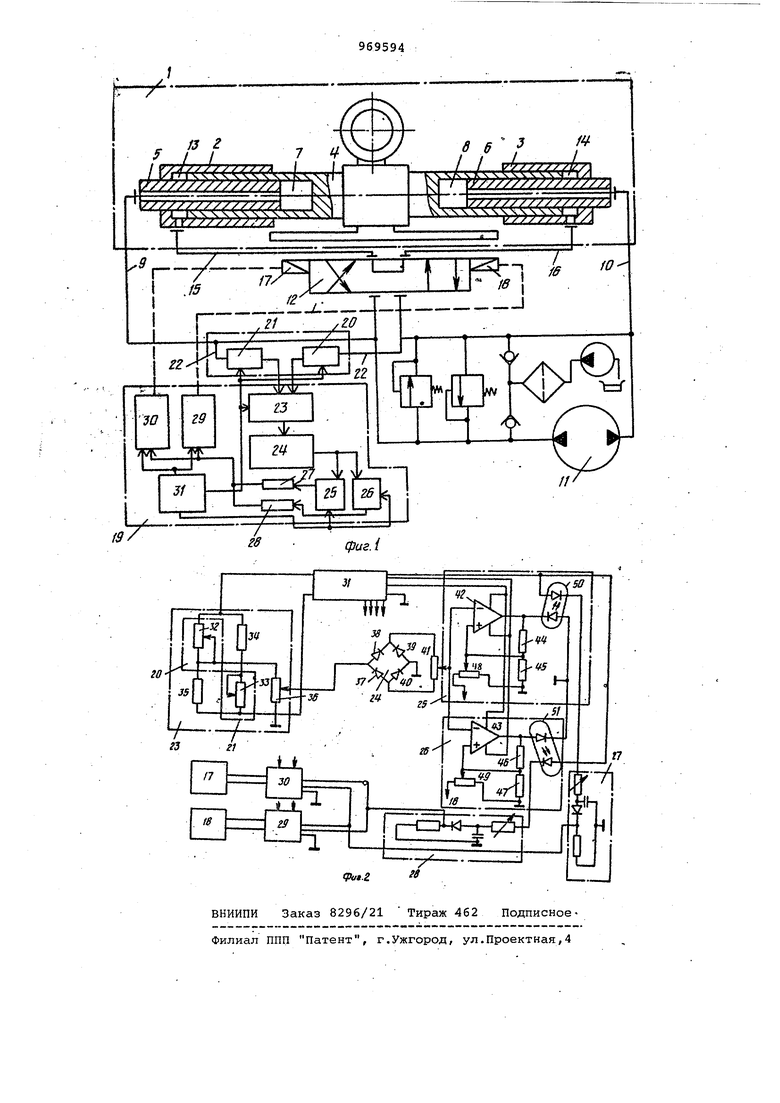
На фиг.1 показана принципиальная схема предлагаемой гидравлической рулевой машины с устройством управления трехпозиционным распределите20лем на фиг. 2 - элект ическая схема устройства управления распределителем.. .
Гидравлическая рулевая машина
(фиг.1) содержит силовой исполнитель25ный механизм 1, включающий цилиндры 2 и 3, подвижной плунжер 4, взаимодействующий через шарнирную передачу с румпелем, и неподвижные плунжеры 5 и 6, закрепленные в цилинд30рах и установленные в расточках
подвижного плунжера. Цилиндры, подвижные и неподвижные плунжеры образуют четыре рабочие камеры: нешунтированные камеры 7 и 8, гидравлически связанные трубопроводами 9 и 10 снасосом 11 и входами трехпозиционного распределителя 12, и шунтированные камеры 13 и 14, соединенные трубопроводами 15 и 16 с выходами трехпозиционного распределителя. Трехпозиционный распределитель 12 выполнен с электромагнитарми 17 и 18 электрически связанными с устройством 19 управления.
Устройство 19 управления содержит пороговый элемент, перепада давления, состоящий из двух пропорциональных датчиков 20 и 21 давления, связанных гидравлически трубопроводами 22 с магистралями насоса, сумматора 23 сигналов датчиков давления двухполупериодного выпрямителя 24, двУх компараторов 25 и 26 максимального и минимального значений, разности сигналов датчиков давления с тиристорными оптронами на выходе, задерживающие цепочки 27 и 28, бесконтактные тиристорные пере.ключшощие устройства 29 и 30 и блок 31 питания
Пропорциональные датчики давления (фиг,2 ) имеют переменные резисто ры 32 и 33, движки которых перемещаются в функции от давления в соответствующей магистралинасоса.
Сумматор 23 сигналов выполнен по мостовой схеме, при этом в противоположные плечи моста включены переменные резисторы 32 и 33. В два других плеча включены постоянные резисторы 34 и 35, а в диагональ моста - переменный резистор 36.
Выход с движка резистора 36 через двухполупериодный выпрямитель 24 состоящий из четырех диодов 37 - 40, соединен с нагрузочным переменным резистором 41, включенным по схеме потенциометра.
Движок резистора 41 соединен с входами компараторов 25 -и 26, собранных на операционных усилителях 42 и 43 по схеме с положительной обратной связью, которая .обеспечивается резисторами 44 - 47 соответственно. Потенциометры 48 и 49 служат для р гулировки величины опорного напряжения, позволяя менять верхний (резистор 48) и нижний (.резистор 49) уровень срабатьшания компараторов, т.е. величины .верхнего и нижнего пределов перепада давления.
Выход операционного усилителя 42 соединен с диодом оптрона 50, а выход операционного усилителя 43 - с диодом оптрона 51, аноды тиристоров этих оптронов подключены к блоку 31 питания, а катоды - с входами, задерживающих цепочек 27 и 28 соответственно.
Блок 31 питания имеет три выхода: двухполярный стабилизированный выход для питания операционных усилителей, стабилизированный однополярный выход для питания потенциометров 48 и 49, датчиков 20 и 21 давления и задерживающих цепочек 27 и 28, нестабилизированный выход для питания бесконтактных переключающих устройств 29 и 30.
Устройство работает следующим образом.
При подаче питания на электродви5 татель насоса 11 одновременно к блоку питания через переключающее устройство 30.подключается электромагнит 17, при этом золотник 12 зайимает левое положение, соединяя рабоQ чие камеры 7 и -8, 13 и 14 с насосом по дифференциальной схеме. На этой ступени регулирования при задании угла перекладки плунжер перемещает,ся с максимальной скоростью.
5 При среднем положении руля давление в магистралях насоса одинаково, перепад давления равен нулю, а на выходе сумматора 23 сигнал отсутствует.
OpTi задании .перекладки руля и возрастании крутящего момента на бал-. лере увеличивается давление в нагнетающей магистрали насоса, что вызывает увеличение электрического сигJ нала, снимаемого с одного из датчиэ -ков 20 или 21 давления ( резисторов 32 или 33;. В том случае, если с нагнетаищей магистралью соединен датчик 20 давления, напряжение на выходе сумматора 23 имеет отрицательное относительно, земли значение, а если датчик 21 - то положительное значение. Однако использование двух полупериодного моста 24 на выходе сумматора 23 исключает изменение
5 полярности падения напряжения на резисторе 41.
Падение напряжения на резисторе 41 . поступает на входы компараторов 25 . и 26. Как только величина сигнала становится больще величины опорного напряжения, снимаемого с резистора 48, компаратор 25 опрокидывается и на его выходе появляется отрицательное напряжение, что приводит 5 к открыванию оптрона 50, и сигнал максимального уровня перепада давления через задерживающую цепочку 27 поступает на управляющий электрод тиристора выключения в переключающем устройстве 30. Происходит отключение электромагнита 17, золотник .распределителя 12 занимает среднее положение, а привод рулевой машины
переходит на вторую ступень регулирования, на которой камеры 13 и 14
шунтируются распределителем 12, Скорость перекладки руля уменьшается.
После переключения давление в нагнетающей магистрали уменьша,ется и компаратор 25 возвращается в прежнее состояние. При дальнейшей перекладке руля и возрастании, перепада давления до максимального порогового уровня сигнал о его значении : таким же образом, как описано выше, поступает через задерживающую цепочку 27 на управляющий электрод тиристора включения в переключающем устройстве 30. Происходит подключение к блоку 31 питания электромагнита 18, и привод переходит на третью ступень регулирования. Скорость перекладки руля принимает минимальное значение, а исполнительный механизм обеспечивает максимальные нагрузочные характеристики.
При обратной перекладке руля и уменьшении перепада давления до минимального порогового уровня срабатывания компаратор 26 (на выходе уси лителя 43 появляется отрицательное напряжение), открывается оптрон 51 и сигнал минимального уровня наступает через задерживающую цепочку 28 на управляющий электрод тиристора выключения в переключающем устройстве 29. Происходит отключение электромагнита 18, и привод возвращается на вторую ступень регулирования.
При дальнейшем уменьшении перепада до величины минимального порогового уровня сигнал о его значении таким же образом поступает на управляющий электрод тиристора включения в устройстве 29. Происходит подключение электромагнита 17, и привод переходит на первую ступень регулирования.
Технико-экономический эффект предлагаемой рулевой машины заключается в повышении ее эксплуатационных , обусловленном повышением на 15-20% надежности за счет исключения перегрузки исполнительного механизма.
Кроме того, в предлагаемой рулевой матине, на 15-25% увеличивается быстродействие перекладки руля благодаря тому, что устройство управления обеспечивает оптимальный режим переключения ступеней регулирования рабочего объема исполнительного механизма.
10
Формула изобретения
Гидравлическая рулевая машина, содержащая силовой исполнительный механизм с группой камер, связанн 1й
5 гидравлическими магистралями с насосом и распределителем с электромагнитным управлением, устройство управления последним, включающее блок питания, задерживающие цепочки и
0 тиристорные переключающие блоки постоянного тока с тиристорами включения и выключения электромагнитов распределителя, отл и чающаяся тем, что, с целью улучшения
5 эксплуатационньвс качеств путем повышения скорости перекладки руля, а также повышения надежности работы, устройство управления распределителем содержит пороговый элемент
Q перепада давления с двумя пропорциональными датчиками давления, входы которых подключены к упомянутым гидравлическим магистралям, связывающим силовой исполнительный механизм с насосом, сумматор, двухполу5периодный выпрямитель и два компаратора, при этом выходу датчиков давления через сумматор, двухполупериодный выпрямитель и компараторы связаны с входами задерживающих цепочек, а компараторы, сумматор и
датчики давления подключены электрическими цепями к упомянутому блоку питания.
Источники информации,
5 принятые во внимание при экспертизе
1. Авторское свидетельство СССР - по заявке № 2845679/11,
кл. В 63 Н 25/30, 18.01.80 (прототип).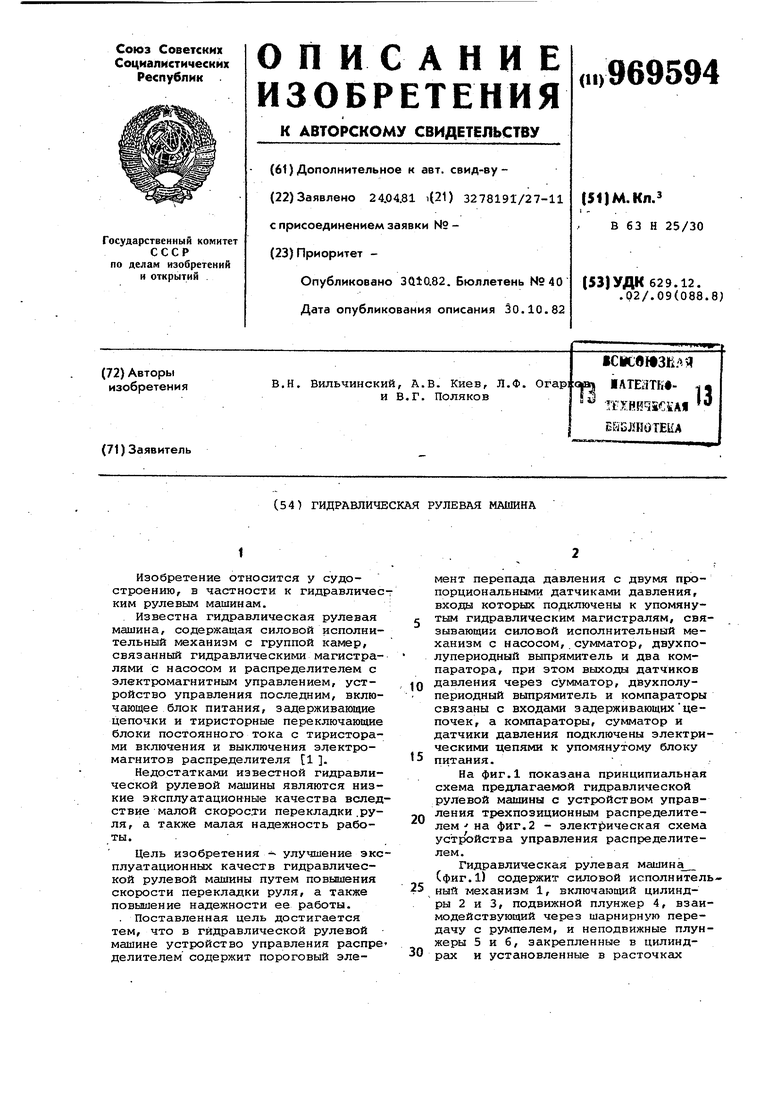
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая рулевая машина | 1981 |
|
SU969595A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969596A1 |
| Гидравлическая рулевая машина | 1981 |
|
SU948773A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU770927A1 |
| Гидравлическая рулевая машина | 1980 |
|
SU880882A1 |
| Устройство для управления электрогидравлической многокамерной рулевой машиной | 1983 |
|
SU1123938A1 |
| Электрогидравлическая рулевая машина | 1981 |
|
SU998233A1 |
| Электрогидравлическая рулевая машина | 1986 |
|
SU1320122A1 |
| Гидравлическая рулевая машина | 1979 |
|
SU816875A1 |
| Электрогидравлическая рулевая машина | 1985 |
|
SU1261840A1 |