Изобретение относится к радиотехнике и может быть использовано в системах загоризонтного обнаружения и определения местоположения объектов по радиоизлучениям передатчиков декаметрового диапазона волн при использовании одной приемной станции. Изобретение применимо в стационарных и мобильных радиопеленгаторах-дальномерах, в загоризонтных активных и полуактивных (с посторонней подсветкой) радиолокаторах и в других системах, основанных на приеме ионосферных сигналов.
Признано, что основополагающей процедурой обеспечения потенциально достижимых точностей пеленгования является калибровка, то есть последовательность операций формирования калибровочной базы данных. Калибровочные данные описывают комплексные диаграммы (амплитуды и фазы) антенн при облучении антенной решетки приемной системы радиопеленгатора-дальномера на множестве частот, поляризаций, азимутов и углов места. Калибровочные данные могут применяться при реализации корреляционных алгоритмов оценки пространственного спектра, максимумы которого описывают углы прихода сигнала, или использоваться для вычисления поправочных коэффициентов, обеспечивающих коррекцию выходного сигнала элементов решетки в процессе формирования фазированного луча.
Основным условием высокой точности функционирования декаметровых радиопеленгаторов-дальномеров является высокое качество базы калибровочных данных. На практике, несмотря на использование совершенных технологий формирования базы калибровочных данных возникают проблемы получения предельно достижимых характеристик систем, размещаемых в стационарных условиях или на подвижных платформах (автомобилях, самолетах, кораблях и т.д.).
Известен способ калибровки декаметрового радиопеленгатора-дальномера [1], включающий:
облучение антенной решетки радиопеленгатора-дальномера сигналом с вертикальной поляризацией на множестве калибровочных частот и азимутальных калибровочных направлений;
прием сигнала каждым каналом антенной решетки;
измерение относительных амплитуд и фаз принятых сигналов;
запись измеренных амплитуд и фаз для каждой комбинации приемного канала, калибровочных частот и азимутальных направлений в качестве калибровочных данных.
Данный способ может обеспечить формирование ионосферного сегмента базы калибровочных данных. В тоже время реализация данного способа требует применения летно-подъемных средств, что существенно усложняет калибровку и увеличивает затраты на ее проведение, или использования источника облучающего сигнала, размещаемого на поверхности земного геоида, что приводит к большим ошибкам формирования ионосферного сегмента из-за отсутствия у данного способа операций борьбы с интерференционными искажениями принимаемого многолучевого поля.
Известен способ калибровки декаметрового радиопеленгатора-дальномера [2], свободный от этого недостатка и выбранный в качестве прототипа. Согласно этому способу:
периодически облучают антенную решетку радиопеленгатора-дальномера на множестве калибровочных частот и азимутальных направлений вертикально поляризованным сигналом с расширенным спектром,
синхронно и когерентно принимают на частотах калибровки облучающий сигнал каждым каналом антенной решетки,
синхронно преобразуют принятые каналами сигналы в цифровую форму,
на каждой частоте калибровки из цифровых сигналов выделяют и запоминают сжатые сигналы отдельных лучей принятых сигналов,
по которым формируют для всех комбинаций номеров каналов антенной решетки, значений калибровочных частот и азимутально-угломестных направлений базу калибровочных данных.
Данный способ обеспечивает повышенную точность калибровки по ионосферным волнам и не требует применения летно-подъемных средств.
Однако способ-прототип не обеспечивает предельно достижимых характеристик калибровки по ионосферным волнам в связи с тем, что:
- не использует поляризационные свойства ионосферных сигналов и, как следствие, не идентифицирует сигналы лучей обыкновенной и необыкновенной поляризации, которые вследствие дисперсионных особенностей нестационарной ионосферы на отдельных частотах рабочего диапазона и в течение определенных интервалов времени могут не разделяться по задержке. В результате, база калибровочных данных может содержать для ряда калибровочных частот и направлений ошибочные данные, обусловленные интерференцией не разделенных лучей;
- не обеспечивает формирование калибровочных данных на пораженных мощными помехами частотах рабочего диапазона радиопеленгатора.
Техническим результатом изобретения является повышение точности, информативности и эффективности формирования базы калибровочных данных ионосферных волн широкого класса стационарных и мобильных декаметровых радиопеленгаторов-дальномеров.
Повышение точности, информативности и эффективности формирования базы калибровочных данных ионосферных волн достигается на основе дополнительной информации, извлекаемой в результате идентификации и выделения сигналов лучей обыкновенной и необыкновенной поляризации, а также расширения состава калибровочной информации до двух, отличающихся поляризацией, сегментов калибровочных данных (сегменты обыкновенной и необыкновенной поляризации), и применением современной технологии формирования двухсегментной базы калибровочных данных ионосферных волн, основанной на комбинации измерений, выполняемых на реальном радиопеленгаторе-дальномере и его модели, откорректированной по полученным на ограниченном числе узлов калибровки реальным ионосферным сигналам.
Технический результат достигается тем, что в способе калибровки декаметрового радиопеленгатора-дальномера, заключающемся в том, что периодически облучают антенную решетку радиопеленгатора-дальномера на множестве калибровочных частот и азимутальных направлений вертикально поляризованным сигналом с расширенным спектром, синхронно и когерентно принимают на частотах калибровки облучающий сигнал каждым каналом антенной решетки, синхронно преобразуют принятые каналами сигналы в цифровую форму, на каждой k-ой частоте калибровки из цифровых сигналов выделяют и запоминают сжатые сигналы отдельных i-x лучей принятых сигналов, согласно изобретению из сжатых сигналов на ограниченном множестве калибровочных частот fk, азимутально-угломестных направлений αki, βki и углов между геомагнитным полем и азимутально-угломестными направлениями прихода сигналов θki выделяют и запоминают реальные сигналы лучей обыкновенной (О) и необыкновенной (X) поляризации, а по модели радиопеленгатора-дальномера на оставшемся множестве частот и направлений формируют модельные сигналы О и Х поляризации, по полученным реальным и модельным сигналам О и Х поляризации формируют базу калибровочных данных ионосферных волн на полном множестве частот и направлений.
Возможны частные случаи осуществления способа:
1. Выделение реальных сигналов О и Х поляризации осуществляют путем преобразования сжатых сигналов в многочастотный многолучевой сигнал на трассе калибровки, из которого формируют дистанционно-частотные характеристики (ДЧХ) сигналов О и Х поляризации, сравнивают ДЧХ сигналов О и Х поляризации и отличающиеся задержкой на каждой частоте сжатые сигналы идентифицируют как реальные сигналы О и Х поляризации.
Это исключает ошибки калибровки, обусловленные интерференцией не разделенных сигналов О и Х поляризации, и, как следствие, повышает точность и информативность формирования базы калибровочных данных ионосферных волн.
2. Формирование модельных сигналов О и Х поляризации осуществляют путем облучения модели радиопеленгатора-дальномера на полном множестве частот и направлений идеальным модельным сигналом О поляризации и идеальным модельным сигналом Х поляризации, приема облучающих модельных сигналов, выделения и фиксации на полном множестве частот и направлений модельных сигналов О и Х поляризации, сравнения модельных сигналов с выделенными при калибровке радиопеленгатора-дальномера на ограниченном множестве частот и направлений реальными сигналами О и Х поляризации и коррекции модели, формирования по откорректированной модели модельных сигналов О и Х поляризации на оставшемся множестве частот и направлений.
Это повышает точность и информативность формирования базы калибровочных данных ионосферных волн на не использовавшемся при калибровке реального радиопеленгатора-дальномера множестве частот и направлений.
3. Формирование базы калибровочных данных ионосферных волн на полном множестве частот и направлений осуществляют путем фиксации относительных амплитуд и фаз реальных и модельных сигналов О и Х поляризации, а также идентифицирующего их полного множества частот и направлений в виде двух четырехкоординатных сегментов калибровочных данных: сегмента О поляризации и сегмента Х поляризации.
Это открывает возможность получения калибровочных данных на пораженных мощными помехами частотах, а также сокращает время и затраты на калибровку в реальных условиях эксплуатации радиопеленгатора-дальномера и, следовательно, повышает эффективность формирования двухсегментной базы калибровочных данных ионосферных волн на всем множестве калибровочных частот и направлений.
Предложенный способ, в отличие от прототипа, более полно использует тонкую структуру многолучевых и сложно поляризованных ионосферных сигналов разделяя сигналы лучей не только по задержке, но и по поляризации, что приближает точность калибровки к потенциально достижимой.
Таким образом, за счет дополнительной информации, извлекаемой посредством
идентификации и выделения сигналов лучей обыкновенной и необыкновенной поляризации, что исключает ошибки, обусловленные интерференцией сигналов не разделенных лучей, и, как следствие, повышает точность формирования базы калибровочных данных,
расширения состава калибровочной информации до двух, отличающихся поляризацией, четырехкоординатных сегментов калибровочных данных, что повышает информативность формирования базы калибровочных данных,
комбинации реальных калибровочных данных, полученных для ограниченного числа узлов калибровки по ионосферным волнам в реальных условиях эксплуатации антенной решетки радиопеленгатора, и модельных калибровочных данных, полученных по модели радиопеленгатора, откорректированной путем сопоставления с реальными калибровочными данными, полученными для ограниченного числа узлов калибровки по ионосферным волнам, что обеспечивает возможность получения калибровочных данных на пораженных помехами частотах и, как следствие, повышает эффективность формирования базы калибровочных данных,
удается решить поставленную задачу с достижением указанного технического результата.
Предложенный способ может быть осуществлен при калибровке стационарных и мобильных радиопеленгаторов-дальномеров. В первом случае источник облучающего сигнала перемещается вокруг стационарного радиопеленгатора-дальномера, а во втором случае используется специально организованное или естественное перемещение мобильного радиопеленгатора-дальномера.
Рассмотрим указанные преимущества, а также особенности настоящего изобретения на примере калибровки радиопеленгатора-дальномера, установленного на корабле. В ходе естественного перемещения корабля в каждой точке пространства будут получены данные калибровки только по одному азимутальному направлению. Более эффективным с точки зрения сокращения времени формирования базы калибровочных данных является вариант калибровки в режиме циркуляции корабля по азимуту в выбранных точках на линии курса корабля, который используется при дальнейшем описании способа.
Операции способа поясняются чертежами:
Фиг.1. Структурная схема устройства, реализующего предложенный способ калибровки;
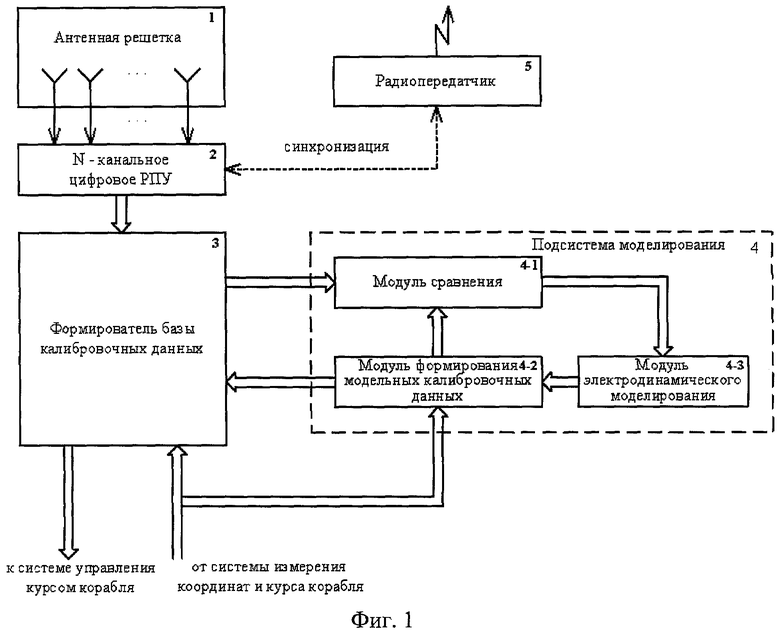
Фиг.2. Схема калибровки декаметрового радиопеленгатора-дальномера, установленного на корабле;
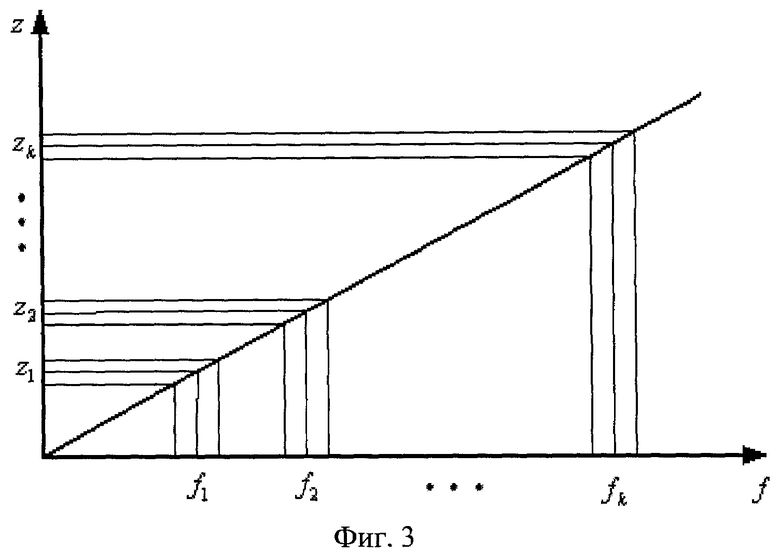
Фиг.3. Схема формирования цифрового сигнала на частотах калибровки;
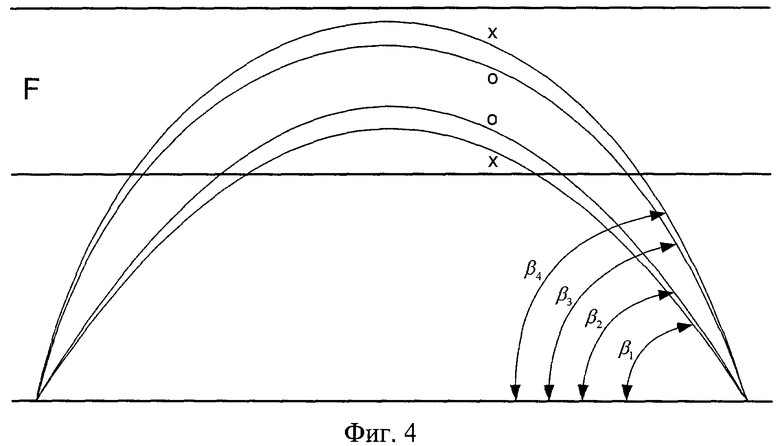
Фиг.4. Пример четырехлучевого ионосферного сигнала;
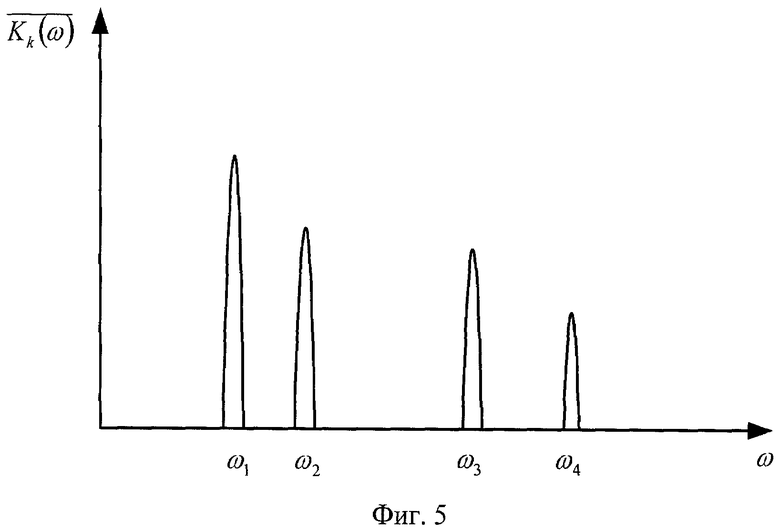
Фиг.5. Усредненная корреляционная функция, зависящая от частотного сдвига, для случая четырехлучевого ионосферного сигнала;
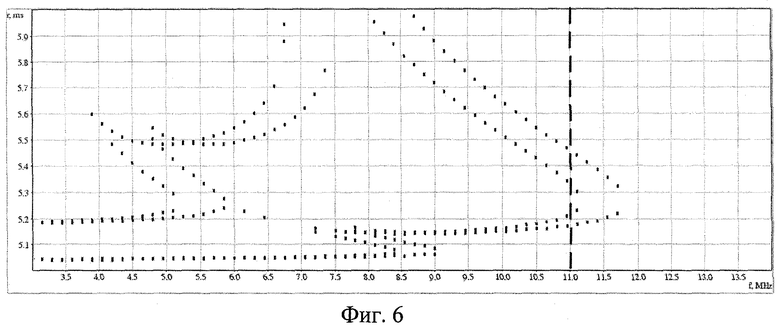
Фиг.6. Многочастотный многолучевой сигнал на трассе калибровки;
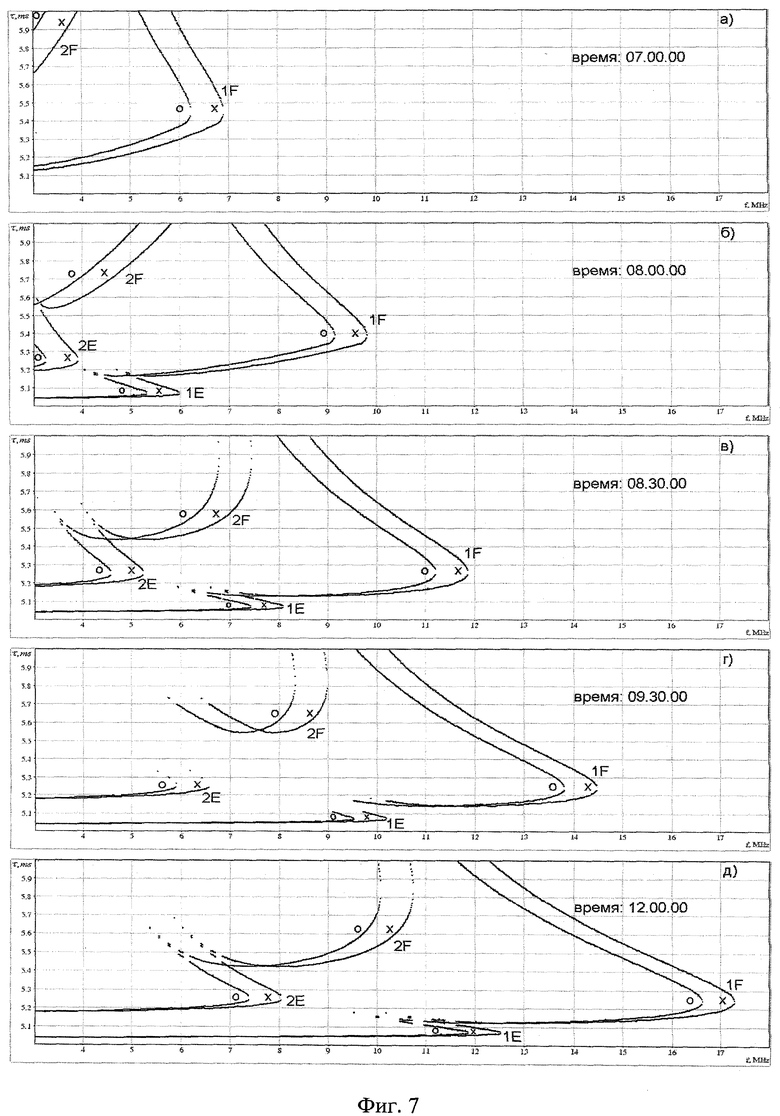
Фиг.7. Модельные дистанционно-частотные характеристики сигналов обыкновенной и необыкновенной поляризации;
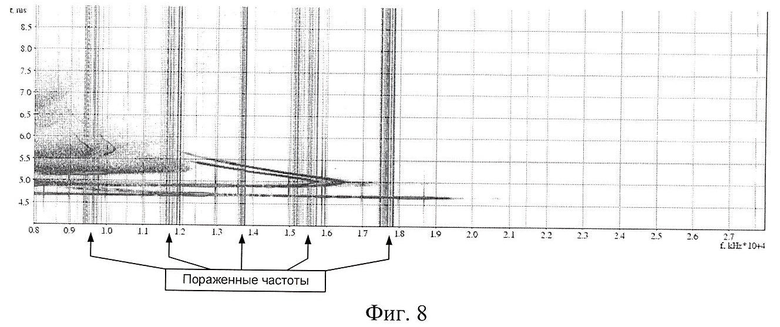
Фиг.8. Реальная дистанционно-частотная характеристика сигналов обыкновенной и необыкновенной поляризации.
Устройство, в котором реализуется предложенный способ, содержит последовательно соединенные антенную решетку из N антенных элементов 1, N - канальное цифровое радиоприемное устройство (РПУ) 2, формирователь базы калибровочных данных 3, подсистему моделирования 4, а также радиопередатчик 5, соединенный со вторым входом РПУ 2. В свою очередь подсистема моделирования 4 включает последовательно соединенные модуль сравнения 4-1, модуль формирования модельных калибровочных данных 4-2 и модуль электродинамического моделирования 4-3. Выход модуля 4-1 соединен с входом модуля 4-3, второй выход модуля 4-2 соединен со вторым входом формирователя 3, а второй вход модуля 4-1 подключен к первому выходу формирователя 3. При этом второй вход модуля 4-2 и третий вход формирователя 3 предназначены для получения информации о координатах и курсе корабля, на котором установлен радиопеленгатор-дальномер, а второй выход формирователя 3 - для выдачи команд в систему управления курсом корабля.
Элементы решетки 1 представляют собой скрещенные рамочные антенны, нерегулярно распределенные по корпусу корабля.
РПУ 2 выполнено с общим гетеродином и с полосой пропускания каждого канала, соответствующей ширине спектра сигнала радиопередатчика. Общий гетеродин обеспечивает многоканальный когерентный прием сигналов на частоте калибровки. Кроме того, частота и фаза гетеродина синхронизирована с параметрами сигнала радиопередатчика, что является основным условием возможности сжатия принятого сложного сигнала во времени или по частоте. Возможен вариант построения РПУ 2 по принципу приемника прямого усиления. При этом каналы РПУ 2 выполняют функцию предварительной фильтрации принимаемого сигнала по частоте и функцию усиления сигнала до уровня согласованного с входным диапазоном уровней АЦП, окончательная фильтрация выполняется в цифровой форме в формирователе 3.
Формирователь 3 представляет собой многопроцессорное вычислительное устройство, что повышает быстродействие преобразования сигналов, принимаемых N-элементной антенной решеткой, при формировании двухсегментной базы калибровочных данных.
Модули подсистемы 4, предназначенной для формирования модельных калибровочных данных, дополняющих реальные калибровочные данные, также представляют собой вычислительные устройства.
Модуль 4-1 предназначен для сравнения реальных калибровочных данных, полученных на ограниченном множестве частот и направлений в реальных условиях эксплуатации корабельного радиопеленгатора-дальномера, и модельных калибровочных данных, полученных по модели радиопеленгатора (модель корабля с распределенной по его корпусу модельной пеленгационной антенной решеткой).
Модуль 4-2 предназначен для формирования модельных калибровочных данных с использованием модели радиопеленгатора-дальномера, модельных облучающих сигналов О и Х поляризации и алгоритма их обработки.
Модуль 4-3 предназначен для хранения модели радиопеленгатора-дальномера, а также ее коррекции с целью повышения адекватности по реальным калибровочным данным, полученным в процессе калибровки на ограниченном множестве частот и направлений.
Радиопередатчик 5 выполнен в стационарном варианте. Возможно применение нескольких стационарных или одного мобильного радиопередатчика 5, что может придать дополнительную гибкость процессу калибровки. Синхронизация радиопередатчика 5 и РПУ 2 может быть обеспечена с использованием стандартных приемников системы ГЛОНАСС или НАВСТАР, а также по радиоканалам спутниковой или ДКМВ связи.
Способ калибровки декаметрового радиопеленгатора-дальномера осуществляется следующим образом.
Периодически облучают антенную решетку радиопеленгатора-дальномера на множестве калибровочных частот и азимутальных направлений вертикально поляризованным сигналом с расширенным спектром.
Это обеспечивается фиксацией пространственных координат собственного радиопередатчика П (фиг.2) или выбором любого стационарного радиопередатчика ДКМВ диапазона с известными координатами, периодически во времени излучающего радиосигнал с расширенным спектром, например, непрерывный ЛЧМ радиосигнал, и циркуляцией корабля в точках приема, находящихся в зоне ионосферных волн, например, в точке t1 (фиг.2).
Радиосигнал радиопередатчика П отражаясь от различных слоев ионосферы распространяется по разным траекториям. Сигнал отдельной траектории расщепляется в ионосфере под действием геомагнитного поля  на сигналы О и Х поляризации, отличающиеся параметрами взаимно ортогональных эллипсов поляризации.
на сигналы О и Х поляризации, отличающиеся параметрами взаимно ортогональных эллипсов поляризации.
Свойства сигналов обыкновенной и необыкновенной поляризации в точке приема определяются параметрами геомагнитного поля  и направлением прихода сигнала в эту точку или другими словами - углом θ.
и направлением прихода сигнала в эту точку или другими словами - углом θ.
Таким образом, радиосигнал радиопередатчика П в (70-80)% случаев наблюдается как многолучевый с очень близкими азимутами и доплеровскими частотами, но отличающимися задержками, углами (β1>0, β2>0,…) и (θ1>0, θ2>0,…), а также видом поляризации. Это открывает возможность одновременного формирования калибровочных данных для нескольких углов места, нескольких углов между геомагнитным полем и направлениями прихода сигналов, а также для обыкновенной и необыкновенной поляризации.
Синхронно и когерентно принимается облучающий сигнал на частоте калибровки каждым n-м, n=1…N, каналом антенной решетки. При этом по сигналу синхронизации РПУ 2 перестраивается на заданную частоту приема. Сигналы радиопередатчика П, зависящие от времени, принимаются антеннами решетки 1. В РПУ 2 принятый каждой антенной решетки 1 зависящий от времени t сигнал xn(t) когерентно с сигналами других каналов переносится на более низкую частоту и синхронно преобразуется с помощью АЦП в ансамбль цифровых сигналов xn(z), где z - дискретные отсчеты времени. Цифровые сигналы xn(z) поступают в формирователь 3. Одновременно в формирователь 3 от системы управления кораблем поступает информация о координатах и курсе корабля.
В формирователе 3 на каждой частоте калибровки fk, где k - номер частоты калибровки, из цифровых сигналов xn(z) выделяются и запоминаются сжатые сигналы отдельных i-x лучей принятых сигналов.
Выделение сжатых сигналов отдельных лучей на каждой частоте калибровки может быть осуществлено различными способами. Рассмотрим наиболее эффективный из них [2], в соответствии с которым на каждой частоте калибровки fk выполняются следующие действия:
- выделяются Q отсчетов цифровых сигналов xn(z), соответствующих отдельной частоте fk.
Количество отсчетов Q на отдельной частоте fk зависит от ширины полосы В и скорости изменения частоты ν ЛЧМ радиосигнала, а также от интервала дискретизации Td АЦП и равно  . Выделение отсчетов сигналов xn(z) осуществляется в соответствии со схемой, представленной на фиг.3, путем отбора отсчетов АЦП на временном интервале
. Выделение отсчетов сигналов xn(z) осуществляется в соответствии со схемой, представленной на фиг.3, путем отбора отсчетов АЦП на временном интервале  , где
, где  момент времени, соответствующий частоте калибровки fk;
момент времени, соответствующий частоте калибровки fk;
- формируются и запоминаются зависящие от частотного сдвига ω комплексные корреляционные функции (КФЧ)  между принятым каждой n-й антенной решетки цифровым сигналом xn(z) и опорным сигналом y0(z), синхронизированным с облучающим сигналом.
между принятым каждой n-й антенной решетки цифровым сигналом xn(z) и опорным сигналом y0(z), синхронизированным с облучающим сигналом.
Для более эффективного вычисления комплексных КФЧ используется быстрый алгоритм на основе БПФ;
- усредняются модули комплексных КФЧ по формуле  .
.
Пример усредненной КФЧ  , сформированной для случая отраженного от слоя F четырехлучевого ионосферного сигнала на частоте fk (см. фиг.4), приведен на фиг.5;
, сформированной для случая отраженного от слоя F четырехлучевого ионосферного сигнала на частоте fk (см. фиг.4), приведен на фиг.5;
- определяются по максимумам усредненной КФЧ число лучей в принятом на частоте fk сигнале и значение частотного сдвига ωki сигнала каждого i-го луча;
- идентифицируются соответствующие отдельным максимумам усредненной КФЧ составляющие  комплексных КФЧ
комплексных КФЧ  как сжатый по спектру сигнал i-го луча на частоте fk, и вычисляются соответствующие сигналу i-го луча время задержки τki=ωki/ν, групповой путь Lki=τkic, где с - скорость распространения света, а также используя координаты радиопередатчика П и радиопеленгатора находят азимут αki прихода сигнала i-го луча и его угол места
как сжатый по спектру сигнал i-го луча на частоте fk, и вычисляются соответствующие сигналу i-го луча время задержки τki=ωki/ν, групповой путь Lki=τkic, где с - скорость распространения света, а также используя координаты радиопередатчика П и радиопеленгатора находят азимут αki прихода сигнала i-го луча и его угол места  , где r - радиус Земли, R - расстояние между радиопередатчиком П и радиопеленгатором-дальномером. Кроме того, находится угол между геомагнитным полем и найденным азимутально-угломестным направлением прихода сигнала i-го луча по следующей формуле: θki=arccos [sinIsinβki+cosIcosβkicos(D-αki)], где I - магнитное наклонение, a D - магнитное склонение в точке размещения радиопеленгатора-дальномера, определяемые по карте геомагнитного поля или по эмпирической модели геомагнитного поля [3];
, где r - радиус Земли, R - расстояние между радиопередатчиком П и радиопеленгатором-дальномером. Кроме того, находится угол между геомагнитным полем и найденным азимутально-угломестным направлением прихода сигнала i-го луча по следующей формуле: θki=arccos [sinIsinβki+cosIcosβkicos(D-αki)], где I - магнитное наклонение, a D - магнитное склонение в точке размещения радиопеленгатора-дальномера, определяемые по карте геомагнитного поля или по эмпирической модели геомагнитного поля [3];
- выделяются и запоминаются сжатые сигналы i-x лучей принятых сигналов, то есть значения идентифицированных составляющих комплексных КФЧ , и соответствующие им значения частот fk, задержек τki и углов αki, βki и θki.
После этого в формирователе 3 из сжатых сигналов на ограниченном множестве  калибровочных частот fk, азимутально-угломестных направлений αki, βki и углов между геомагнитным полем и азимутально-угломестными направлениями прихода сигналов θki выделяются реальные сигналы лучей обыкновенной (О) и необыкновенной (X) поляризации.
калибровочных частот fk, азимутально-угломестных направлений αki, βki и углов между геомагнитным полем и азимутально-угломестными направлениями прихода сигналов θki выделяются реальные сигналы лучей обыкновенной (О) и необыкновенной (X) поляризации.
При этом выполняются следующие действия:
- преобразуются сжатые сигналы в многочастотный многолучевой сигнал на трассе калибровки.
Преобразование выполняется с использованием выделенных и запомненных сжатых сигналов путем формирования множества точек в многомерном пространстве "частота-задержка-амплитуда". При этом каждая точка характеризуется тремя координатами: fk - частота; τki - задержка;  - амплитуда сжатого сигнала i-го луча на k-ой частоте и n-ой антенне.
- амплитуда сжатого сигнала i-го луча на k-ой частоте и n-ой антенне.
Пример многочастотного многолучевого сигнала на плоскости "задержка τ - частота f" представлен на фиг.6. Из фиг.6 следует, что положение точек в сечении многочастотного многолучевого сигнала на частоте 11 МГц коррелирует с положением максимумов усредненной КФЧ , полученной на этой же частоте для случая четырехлучевого ионосферного сигнала и представленной на фиг.5. Это обусловлено тем, что многочастотный многолучевой сигнал получен преобразованием совокупности сигналов усредненных КФЧ .
Кроме того, из фиг.6 также следует, что в положении точек на плоскости "задержка-частота" наблюдается определенная регулярность, позволяющая сгруппировать точки в связанные цепочки, дискретно описывающие зависимости времени задержки сигналов лучей О и Х поляризации от частоты, то есть сформировать ДЧХ на трассе калибровки;
- из многочастотного многолучевого сигнала формируется совокупность ДЧХ сигналов О и Х поляризации.
Для этого группируются точки путем сопоставления на соседних частотах fk и fk' пар точек с индексами i и i'. Сопоставление выполняется путем сравнения функционала расстояния между точками в трехмерном пространстве "частота-задержка-амплитуда" с порогом ρ0

Значения порога ρ0 и нормировочных параметров εf, ετ, εa подбираются эмпирически и полагаются равными, например, соответственно ρ0=3, εf=500 кГц, ετ=0.1 мс, εa=3 дБ.
Если выполняется условие ρki;k'i'≤ρ0, то пара точек считается принадлежащей одной ДЧХ и запоминается средняя амплитуда 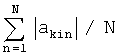 каждой точки. Если для какой либо точки соответствие не устанавливается, то считается, что они относятся к новой ДЧХ.
каждой точки. Если для какой либо точки соответствие не устанавливается, то считается, что они относятся к новой ДЧХ.
Кроме того, для повышения качества формирования ДЧХ при низких отношениях сигнал-шум из множества выделенных ДЧХ удаляются те, которые удовлетворяют одному из следующих критериев:
1) число точек в отдельной ДЧХ меньше заданного порога, равного 3% от общего числа точек в трехмерном пространстве "частота-задержка-амплитуда";
2) длина отдельной ДЧХ в частотной области меньше заданного порога, равного 500 кГц;
3) максимальная средняя амплитуда в выделенной ДЧХ меньше заданного порога, равного минус 70 дБ.
Приведенные пороговые значения получены по результатам экспериментальной проверки возможности формирования ДЧХ в реальных условиях ДКМВ диапазона.
Примеры модельных ДЧХ в диапазоне частот 3-18 МГц, полученных для ряда последовательных интервалов времени восходно-полуденного периода, приведены на фиг.7. Пример реальной ДЧХ сигналов О и Х поляризации в диапазоне частот 3-18 МГц, полученной для восходно-полуденного периода, приведен на фиг.8, где также указаны пораженные мощными помехами частоты.
Из фиг.7а следует, что ДЧХ односкачковых (IF) и двухскачковых (2F) сигналов О и Х поляризации разделяются по задержке на всех частотах от 3 МГц до 7 МГц.
Из фиг.7б следует, что по истечении 1 часа односкачковые и двухскачковые сигналы 1Fo, 1Fx, 2Fo, 2Fx, 2Eo, 2Ex полностью разделяются на всех частотах от 3 МГц до 10 МГц, в то время как односкачковые сигналы 1Ех и 1Ео полностью разделяются на частотах от 5 МГц до 6 МГц, но не разделяются на частотах от 3 МГц до 5 МГц.
Из фиг.7в - фиг.7д, также как и из фиг.7а и фиг.7б, следует, что в восходно-полуденный период область частот, на которых возможно отражение сигналов О и Х поляризации от различных слоев ионосферы возрастает с течением времени. Одновременно наблюдается изменение областей частот и интервалов задержек, на которых обеспечивается полное разделение лучей обыкновенной и необыкновенной поляризации.
Следует отметить, что полусуточные изменения ДЧХ обеспечивают возможность непрерывного перекрытия диапазона частот и временных задержек, так как в полуденно-заходный период времени поведение ДЧХ имеет характер, обратный приведенному на фиг.7.
Таким образом, из фиг.7 и фиг.8 следует, что ДЧХ сигналов О и Х поляризации подобны друг другу и смещены по частоте, что является характерным признаком, позволяющим осуществить однозначную идентификацию и выделение сигналов О и Х поляризации;
- сравниваются ДЧХ сигналов О и Х поляризации и отличающиеся задержкой на каждой частоте сжатые сигналы идентифицируются как реальные сигналы О и Х поляризации.
Данная операция является ключевой для последующего высокоточного формирования базы калибровочных данных ионосферных волн, так как обеспечивает исключение ошибок калибровки, обусловленных интерференцией не разделенных сигналов обыкновенной и необыкновенной поляризации.
Далее идентифицированные реальные сигналы О и Х поляризации в виде относительных амплитуд и фаз запоминаются в формирователе 3 для последующего формирования базы калибровочных данных ионосферных волн на ограниченном множестве частот и направлений . Относительные амплитуды и фазы идентифицированных реальных сигналов О и Х поляризации представляют собой соответственно модули и аргументы ранее запомненных комплексных КФЧ . Частота fk и углы αki, βki, θki являются четырехмерными координатами, по которым относительные амплитуды и фазы идентифицируются в двухсегментной базе калибровочных данных при ее формировании и дальнейшем использовании.
Отметим, что, повторяя аналогичные операции по обработке сигналов в РПУ 2 и формирователе 3 после перемещения корабля в другие точки калибровки (или после перехода к приему сигналов передатчиков, размещаемых в других точках земного геоида), можно сформировать базу калибровочных данных ионосферных волн на полном множестве необходимых калибровочных частот и направлений, за исключением частот, занятых мощными помехами (например, функционирующими в зоне калибровки мощными радиовещательными станциями, см. фиг.8). Однако это не очень практично, так как связано с существенным увеличением времени и затрат на калибровку. Кроме того, это не позволяет решить проблему калибровки на пораженных частотах.
Заметим, что угол θki определяет параметры О и Х поляризации приходящей ионосферной волны не зависимо от географических координат точки приема (см. фиг.2). В связи с этим калибровочные данные, полученные для конкретного значения угла θki могут быть использованы в различных точках размещения радиопеленгатора на земном геоиде, что сокращает время и затраты на калибровку.
Более существенное сокращение времени и затрат на калибровку и, что не менее важно, решение проблемы калибровки на пораженных частотах достигается применением модельных калибровочных данных.
Для этого выделенные при калибровке реального радиопеленгатора-дальномера на ограниченном множестве частот и направлений и запомненные в формирователе 3 в качестве калибровочных данных реальные сигналы О и Х поляризации также поступают на второй вход модуля 4-1.
Одновременно в модуле 4-2 подсистемы 4 с использованием модели радиопеленгатора-дальномера, поступающей из модуля 4-3, и информации о координатах и курсе корабля, поступающей от его системы управления, формируются и запоминаются модельные сигналы О и Х поляризации на оставшемся множестве частот и направлений  , то есть на множестве частот и направлений, на которых не были выделены реальные сигналы О и Х поляризации.
, то есть на множестве частот и направлений, на которых не были выделены реальные сигналы О и Х поляризации.
Для этого выполняются следующие действия:
- модель радиопеленгатора-дальномера облучается идеальным модельным сигналом О поляризации и идеальным модельным сигналом Х поляризации на полном множестве частот и направлений ( .
.
Отметим, что полное множество частот и направлений  состоит из двух множеств и
состоит из двух множеств и  .
.
Модель радиопеленгатора-дальномера создается с использованием цифровых систем электромагнитного моделирования, например [4, 5]. Идеальные модельные сигналы О и Х поляризации формируются на основе решения системы лучевых уравнений в магнитоактивной трехмерной неоднородной ионосфере, например, в соответствии с [6]. При этом параметры эллипсов поляризации идеальных модельных сигналов зависят от направления их прихода в точку наблюдения, а также от характеристик геомагнитного поля в точке наблюдения;
- принимаются облучающие модельные сигналы О и Х поляризации модельной антенной решеткой.
Понятно, что идеальные модельные сигналы О и Х поляризации искажаются под воздействием корпуса корабля. Искажения сводятся к изменению поляризации облучающего идеального сигнала и к возникновению интерференции за счет отражений от конструкций корпуса модели корабля;
- принятые модельные сигналы одной и другой поляризации выделяются и запоминаются в модуле 4-2 на полном множестве частот и направлений в качестве модельных сигналов О и Х поляризации, а также поступают на первый вход модуля 4-1.
В модуле 4-1 выделенные модельные сигналы О поляризации и модельные сигналы Х поляризации сравниваются с выделенными при калибровке радиопеленгатора-дальномера на ограниченном множестве частот и направлений реальными сигналами О и Х поляризации, поступившими от формирователя 3. При сравнении используется корреляционная методика, приведенная, например, в [7] и позволяющая определить поправочные комплексные коэффициенты для поляризационных диаграмм направленности антенных элементов модельной антенной решетки на всем множестве частот и направлений  путем сравнения реальных и модельных сигналов О и Х поляризации на ограниченном множестве частот и направлений . Результаты сравнения в виде поправочных комплексных коэффициентов к поляризационным диаграммам направленности элементов модельной антенной решетки для О и Х поляризации на полном множестве частот и направлений поступают в модуль 4-3.
путем сравнения реальных и модельных сигналов О и Х поляризации на ограниченном множестве частот и направлений . Результаты сравнения в виде поправочных комплексных коэффициентов к поляризационным диаграммам направленности элементов модельной антенной решетки для О и Х поляризации на полном множестве частот и направлений поступают в модуль 4-3.
В модуле 4-3 с использованием поступивших из модуля 4-1 поправочных комплексных коэффициентов производится коррекция модели радиопеленгатора. Для этого комплексная диаграмма направленности каждого элемента модельной пеленгационной антенной решетки для О и Х поляризации умножается на поправочный комплексный коэффициент на полном множестве частот и направлений калибровки .
Откорректированная модель радиопеленгатора-дальномера поступает в модуль 4-2.
В модуле 4-2 по откорректированной модели формируются модельные сигналы О и Х поляризации на оставшемся множестве частот и направлений  . При этом откорректированная модель облучается идеальными модельными сигналами О и Х поляризации. После этого выполняются операции приема этих сигналов, а также выделения и запоминания модельных сигналов О и Х поляризации аналогично описанному ранее.
. При этом откорректированная модель облучается идеальными модельными сигналами О и Х поляризации. После этого выполняются операции приема этих сигналов, а также выделения и запоминания модельных сигналов О и Х поляризации аналогично описанному ранее.
Это повышает точность формирования базы калибровочных данных ионосферных волн на не использовавшемся при калибровке реального радиопеленгатора множестве частот и направлений .
Сформированные в модуле 4-2 на оставшемся множестве частот и направлений модельные сигналы О и Х поляризации поступают в формирователь 3 для формирования комбинированной базы калибровочных данных.
В формирователе 3 объединяются запомненные реальные калибровочные данные, сформированные из выделенных на ограниченном множестве частот и направлений реальных сигналов О и Х поляризации при калибровке радиопеленгатора-дальномера, и модельные калибровочные данные, сформированные из модельных сигналов О и Х поляризации, полученных на оставшемся множестве частот, включая пораженные частоты, и направлений по модели радиопеленгатора-дальномера в модуле 4-2. При этом относительные амплитуды и фазы выделенных реальных и модельных сигналов О и Х поляризации, а также идентифицирующее их полное множество частот и направлений , состоящее из множеств и , фиксируются в виде двух четырехкоординатных сегментов калибровочных данных: сегмента О поляризации и сегмента Х поляризации.
Понятно, что это повышает информативность формирования базы калибровочных данных ионосферных волн. Относительные амплитуды и фазы, фиксируемые в качестве калибровочных данных в сегменте О поляризации и в сегменте Х поляризации, представляют собой соответственно модули и аргументы запомненных в формирователе 3 комплексных КФЧ . Частота fk и углы αki, βki, θki являются четырехмерными координатами, по которым относительные амплитуды и фазы идентифицируются в двухсегментной базе калибровочных данных при ее формировании и дальнейшем использовании.
Таким образом, в результате объединения реальных и модельных калибровочных данных устройство, содержащее антенную решетку, цифровое радиоприемное устройство, формирователь базы калибровочных данных и подсистему моделирования, обеспечивает эффективное формирование двухсегментной базы калибровочных данных ионосферных волн на всем множестве частот и направлений с высокой точностью.
Кроме того, из приведенного описания следует, что устройство, реализующее предложенный способ, обладает устойчивостью к ошибкам калибровки, обусловленным интерференцией сигналов не разделенных лучей, содержит более информативную двухсегментную базу калибровочных данных ионосферных волн (сегмент обыкновенной и сегмент необыкновенной поляризации) для множества частот, азимутально-угломестных направлений и углов между геомагнитным полем и азимутально-угломестными направлениями прихода сигналов, и построено на современной технологии формирования базы калибровочных данных, основанной на комбинации измерений, выполняемых на реальном радиопеленгаторе и откорректированной по реальным ионосферным сигналам и, следовательно, высокоадекватной электродинамической модели.
Таким образом, данный способ
приближает точность калибровки к потенциально достижимой, так как использует тонкую структуру многолучевых и сложно поляризованных ионосферных сигналов и исключает ошибочные данные, обусловленные интерференцией сигналов не разделенных лучей,
повышает информативность калибровки, так как расширяет состав калибровочной информации до двух, отличающихся поляризацией, четырехкоординатных (частота, азимут, угол места и угол между геомагнитным полем и направлением прихода сигналов) сегментов калибровочных данных,
повышает эффективность калибровки, так как базируется на современной технологии формирования базы калибровочных данных, основанной на комбинации измерений, выполняемых на реальном пеленгаторе и его модели, и обеспечивающей возможность получения калибровочных данных на всех, включая пораженные помехами, частотах рабочего диапазона,
и может быть использован при формировании и непрерывной коррекции базы калибровочных данных ионосферных волн на протяжении всего жизненного цикла широкого класса стационарных и мобильных радиопеленгаторов-дальномеров, загоризонтных активных и полуактивных радиолокаторов и других систем, основанных на приеме ионосферных сигналов.
Источники информации
1. US, патент, 4992796, кл. G01S 13/48, 1991 г.
2. RU, патент, 2309425, кл. G01S 7/40, G09B 9/00, 2007 г.
3. http://nssdc.gsfc.nasa.gov/space/cgm/ext.html
4. Лерер A.M., Шевченко В.Н. Повышение эффективности корабельных радиопеленгаторов методами электродинамического моделирования. // Электромагнитные волны и электронные системы, 2007, №5, с.21-24.
5. http://www.feko.co.za/
6. Вертоградов Г.Г. Имитатор широкополосного ионосферного радиоканала. // Радиотехника и электроника. Т.48, №11. 2003. С.1322-1329.
7. US, патент, 6720911, кл. G01S 7/40, G01S 13/48, 2004 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2005 |
|
RU2309425C2 |
| СПОСОБ КАЛИБРОВКИ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКИХ СИСТЕМ НА ПОДВИЖНЫХ ПЛАТФОРМАХ | 2005 |
|
RU2284043C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2009 |
|
RU2420755C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ИОНОСФЕРНЫХ НЕОДНОРОДНОСТЕЙ | 2013 |
|
RU2529355C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444756C1 |
| ИОНОСФЕРНЫЙ ЗОНД-РАДИОПЕЛЕНГАТОР | 2009 |
|
RU2399062C1 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| СПОСОБ ПОИСКА ДЕКАМЕТРОВЫХ ПЕРЕДАТЧИКОВ | 2005 |
|
RU2302646C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ (ВАРИАНТЫ) | 2008 |
|
RU2393498C2 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОЙ ЛОКАЛИЗАЦИИ МНОГОЛУЧЕВЫХ РАДИОСИГНАЛОВ | 2008 |
|
RU2385467C1 |
Изобретение относится к радиотехнике и может быть использовано в системах загоризонтного обнаружения и определения местоположения объектов по радиоизлучениям передатчиков декаметрового диапазона волн при использовании одной приемной станции. Достигаемым техническим результатом изобретения является повышение точности, информативности и эффективности формирования базы калибровочных данных ионосферных волн широкого класса стационарных и мобильных декаметровых радиопеленгаторов-дальномеров. Результат достигается на основе дополнительной информации, извлекаемой в результате идентификации и выделения сигналов лучей обыкновенной и необыкновенной поляризации, расширения состава калибровочной информации до двух, отличающихся поляризацией, сегментов калибровочных данных, и применения технологии формирования базы калибровочных данных ионосферных волн, основанной на комбинации измерений, выполняемых на реальном радиопеленгаторе и его модели, откорректированной по реальным ионосферным сигналам. 1 з.п. ф-лы, 8 ил.
1. Способ калибровки декаметрового радиопеленгатора-дальномера, заключающийся в том, что периодически облучают антенную решетку радиопеленгатора-дальномера на множестве калибровочных частот и азимутальных направлений вертикально поляризованным сигналом с расширенным спектром, синхронно и когерентно принимают на частотах калибровки облучающий сигнал каждым каналом антенной решетки, синхронно преобразуют принятые каналами сигналы в цифровую форму, на каждой k-й частоте калибровки из цифровых сигналов выделяют и запоминают сжатые сигналы отдельных i-x лучей принятых сигналов, отличающийся тем, что из сжатых сигналов на ограниченном множестве калибровочных частот fk, азимутально-угломестных направлений αki, βki и углов между геомагнитным полем и азимутально-угломестными направлениями прихода сигналов θki выделяют и запоминают реальные сигналы лучей обыкновенной (О) и необыкновенной (X) поляризации, облучают модель радиопеленгатора-дальномера на полном множестве частот и направлений идеальным модельным сигналом О поляризации и идеальным модельным сигналом Х поляризации, принимают облучающие модельные сигналы, выделяют и фиксируют на полном множестве частот и направлений модельные сигналы О и Х поляризации, сравнивают модельные сигналы с выделенными при калибровке радиопеленгатора-дальномера на ограниченном множестве частот и направлений реальными сигналами О и Х поляризации и корректируют модель радиопеленгатора-дальномера с использованием полученных в результате сравнения поправочных комплексных коэффициентов, формируют по откорректированной модели модельные сигналы О и Х поляризации на оставшемся множестве частот и направлений, по полученным реальным и модельным сигналам O и Х поляризации формируют базу калибровочных данных ионосферных волн на полном множестве частот и направлений путем фиксации относительных амплитуд и фаз реальных и модельных сигналов О и Х поляризации, а также идентифицирующего их полного множества частот и направлений в виде двух четырехкоординатных сегментов калибровочных данных: сегмента О поляризации и сегмента Х поляризации.
2. Способ по п.1, отличающийся тем, что выделение реальных сигналов О и Х поляризации осуществляют путем преобразования сжатых сигналов в многочастотный многолучевой сигнал на трассе калибровки, из которого формируют дистанционно-частотные характеристики (ДЧХ) сигналов О и Х поляризации, сравнивают ДЧХ сигналов О и Х поляризации и отличающиеся задержкой на каждой частоте сжатые сигналы идентифицируют как реальные сигналы О и Х поляризации.
| СПОСОБ КАЛИБРОВКИ РАДИОПЕЛЕНГАТОРА-ДАЛЬНОМЕРА | 2005 |
|
RU2309425C2 |
| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ И РАДИОПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2303274C1 |
| РАДИОПЕЛЕНГАТОР | 1979 |
|
SU1015750A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ХАРАКТЕРИСТИК АНТЕННЫ РАДИОПЕЛЕНГАТОРА | 1990 |
|
SU1697516A1 |
| US 7138940 D2, 21.11.2006 | |||
| УСТРОЙСТВО ДЛЯ БЛОКИРОВКИ ЗАМКА | 1991 |
|
RU2015277C1 |
| US 7576684 B2, 18.08.2009 | |||
| US 2008228458 A1, 18.09.2008. | |||

