Изобретение относится к области гидроакустики, а именно к способу регистрации шумоизлучения малошумного морского объекта в широкой полосе частот и может быть использовано при измерении первичного гидроакустического поля малошумных морских объектов в условиях наличия импульсных помех, случайных выбросов в тракте обработки сигналов, повышенного уровня и нестационарности фоновых шумов (помех) в пределах времени регистрации прохода морского объекта, а также может быть использовано в качестве охранного устройства для защиты морских акваторий, портовых и других подводных сооружений.
Процедура регистрации шумоизлучения морского объекта заключается в фиксации уровней значения проходной характеристики, получаемых путем измерений текущих значений мощности сигналов подводного шума движущегося морского объекта в заданных (третьоктавных или узких) полосах частот.
Измерения производятся в условиях фоновых шумов (помех), что в реальных условиях затрудняет регистрацию проходной характеристики морского объекта, поскольку при высоком уровне помех характеристика прохода оказывается искаженной как случайными флюктуациями, в том числе и импульсного характера, так и добавлением «пьедестала», возникающим вследствие высокого уровня помех.
Существует несколько методов выделения сигнала из смеси сигнал + помеха при регистрации проходной характеристики морского объекта.
Известен метод энергетического вычитания помехи (ЭВП) при измерении шумоизлучения морского объекта. Сущность метода заключается в оценке уровня помехи по краям проходной характеристики (т.е. там, где уровень полезного сигнала во много раз меньше уровня помехи) и последующего вычитания этого уровня из максимального значения проходной характеристики [Новиков А.К. Статистические измерения и обнаружение сигналов. - СПб.: ЦНИИ им. акад. А.Н. Крылова, 2006 г. - С. 151-154].
Основным недостатком метода ЭВП является то, что этот метод имеет малую помехоустойчивость в условиях помех импульсного характера и нестационарной помехи в пределах времени регистрации прохода морского объекта. Кроме этого при направленном в нос или корму характере шумоизлучения источника оценка помехи производится с большой погрешностью, обусловленной недостаточным спадом сигнальной составляющей.
Существенно большими возможностями с точки зрения помехоустойчивости и точности измерения уровня шума при наличии помех различной природы обладает метод энергетической согласованной обработки (ЭСО), реализованный в комплексе технических средств КТС «Тополь-СФП» и разработанный во ВНИИФТРИ В.И. Теверовским, А.О. Кюльян и др. [Новиков А.К. Статистические измерения и обнаружение сигналов. - СПб.: ЦНИИ им. акад. А.Н. Крылова, 2006 г. - С. 151-154].
Сущность метода заключается в том, что по мере прохода источника относительно приемника в полосе анализа регистрируется энергетическая сумма полезного сигнала и помехи, которая затем подвергается обработке при помощи фильтра, согласованного с формой энергетической нестационарности полезного сигнала. При этом происходит фильтрация высокочастотных флюктуаций помехи при сохранении формы низкочастотной (относительно медленной по сравнению с быстрыми флюктуациями помехи) нестационарности полезной компоненты.
При реализации данного метода выполняется обработка следующим образом:
1. Производится запись характеристики прохода по интенсивности с небольшим предварительным сглаживанием.
2. Выполняется расчетная характеристика прохода для тех же параметров, что и для измеренной характеристики прохода.
3. Вычисляются взаимные корреляционные функции между измеренной характеристикой и расчетными функциями, с возможностью изменять ширину расчетной характеристики прохода и приближать ее к реальной характеристике прохода.
4. Вычисляется уровень максимума характеристики прохода.
Метод ЭСО основан на применении алгоритма вычисления корреляционной функции, где сравниваются две функции различного происхождения - измеренная характеристика прохода и расчетная функция.
Недостатком описанного метода, реализованного в комплексе технических средств КТС «Тополь-СФП» является то, что метод ЭСО имеет малую помехоустойчивость в условиях импульсных помех и нестационарной помехи в пределах времени регистрации прохода морского объекта. Динамический диапазон анализа методом ЭСО зависит от свойств случайной нестационарности помехи, амплитуды и ширины флуктуационных «всплесков» помехи.
Для увеличения динамического диапазона измерений рекомендуется, как и в случае метода ЭВП, применять обработку характеристики прохода методом ЭСО усредненной по нескольким проходам характеристики. Тогда случайные по времени появления максимумы помехи сглаживаются за счет усреднения, а регулярные максимумы прохода источника сигнала суммируются, в результате происходит увеличение отношения сигнал/помеха.
Такая возможность реализована другим известным методом повышения помехоустойчивости за счет траекторного накопления проходной характеристики, получившим название Метод энергетической согласованной траекторной обработки (ЭСТО), реализованного также в комплексе технических средств КТС «Тополь-СФП» и взятого за аналог [Новиков А.К. Статистические измерения и обнаружение сигналов. - СПб.: ЦНИИ им. акад. А.Н. Крылова, 2006 г. - С. 151-154], который предполагает, что при проведении измерений используется не один приемник, а N приемников, расположенных в линию параллельно направлению движения измеряемого объекта. В этом случае по каждой из измерительных баз формируются проходные характеристики, которые в каждой частотной полосе подобны друг другу, отличаясь временным сдвигом на определенную величину.
При стационарной помехе и равных дисперсиях флуктуаций на базах суммарная дисперсия в N раз меньше дисперсии при использовании одиночного приемного гидрофона. Таким образом, применение траекторного накопления повышает помехоустойчивость метода ЭСО за счет уменьшения дисперсии помехи.
Учет влияния помех на результаты измерений в рассмотренных методах производится в предположении, что средний уровень помехи, обусловленный шумами отдаленного судоходства, изменением метеоусловий и другими причинами, изменяется во времени достаточно медленно, в течение нескольких часов или суток. Нестационарность же уровня полезного сигнала, излучаемого движущимся объектом, обусловленная перемещением объекта относительно приемника и особенностями направленности излучения, является регулярной и имеет временной масштаб порядка десятков секунд - единиц минут. В закрытых акваториях помеха нестационарна и имеет сложную пространственно-временную структуру в условиях сложного интерференционного акустического поля сигнала и помехи.
Поэтому использование методов ЭВП, ЭСО, ЭСТО, рассмотренных выше и основанных на предположении отсутствия импульсных помех и стационарности помехи в интервале проходной характеристики, неэффективно.
Недостатком описанного аналога является то, что в случае наличия импульсных помех и нестационарности помехи в пределах времени регистрации прохода морского объекта данный метод имеет малую помехоустойчивость.
Возможность регистрации шумоизлучения малошумного морского объекта реализована другим известным способом регистрации малошумного морского объекта (Патент, 2572052 Российской Федерации, МПК G01S 15/04. Способ регистрации малошумного морского объекта / Колмогоров B.C., Викторов Р.В., Шпак С.А., Омельченко А.В., Решетников Д.С.; патентообладатель Шпак С.А. - №2014119095/28; заявл. 12.05.2014; опубл. 27.12.2015; бюл. №36), наиболее близким к заявленному изобретению и выбранным в качестве прототипа.
Указанный способ заключается в том, что сначала регистрируют в приемных устройствах «опорную» амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства. «Опорная» АЧХ регистрируется для последующей обработки в блоке первичной обработки сигналов с целью определения пары приемных устройств с максимальным значением коэффициентов взаимной корреляции между первым и вторым, первым и третьим, … первым и N-м приемными устройствами в блоке расчета взаимно корреляционной функции и принятия решения, затем «опорную» АЧХ подают на соответствующие входы адаптивного фильтра блока вторичной обработки сигналов, где вырабатывают «нормированную» АЧХ шумового поля охраняемого водного пространства. При появлении малошумного морского объекта в охраняемом водном пространстве в области расположения приемных устройств формируют «рабочую» АЧХ водного пространства, которую через ранее выбранный первый приемный канал подают на первый вход блока расчета взаимно корреляционной функции и принятия решения и первый вход адаптивного фильтра блока расчета вторичной обработки сигналов. При превышении амплитуды «рабочей» АЧХ водного пространства над выработанным порогом «нормированной» АЧХ регистрируют АЧХ малошумного морского объекта.
Выбранный в качестве прототипа способ устраняет существенный недостаток аналога, а именно малую помехоустойчивость при применении в условиях нестационарности помехи в пределах времени регистрации прохода морского объекта.
При этом прототип обладает существенным недостатком - снижение помехоустойчивости при применении в условиях помех импульсного характера и наличии случайных выбросов в тракте обработки сигналов.
Импульсные помехи характеризуются наличием кратковременных случайных по времени возникновения и периоду как одиночных, так и последовательности аномальных (как отрицательных, так и положительных значений абсолютной амплитуды, аномально сильно превышающих значения амплитуды соседних отсчетов исследуемых сигналов) выбросов. Идеализированным предельным случаем импульсной помехи является последовательность дельта-функций. Энергетический спектр такой помехи неограничен, но суммарное время ее существования стремится к нулю. Импульсные помехи обладают собственными корреляционными свойствами, отличными от корреляционных свойств исследуемых сигналов и помех другой природы, и часто вносят значительные изменения в результаты расчета взаимно корреляционной функции смеси сигналов и помех. Причинами возникновения таких аномальных выбросов, по абсолютной величине гораздо превышающих уровень исследуемых сигналов, являются природные и техногенные явления, а также нестабильности работы применяемого в трактах обработки оборудования.
Следовательно, импульсные помехи зачастую существенно снижают помехоустойчивость способа, принятого за прототип при применении в описанных условиях, а также вносят погрешности при расчете взаимно корреляционной функции в блоке расчета взаимно корреляционной функции и принятия решения блока вторичной обработки сигналов, что, в свою очередь, может привести к ошибке выбора пары приемных каналов, необходимых для формирования «нормированной», а в последующем и «рабочей», АЧХ водного пространства.
На устранение описанного недостатка прототипа направлено заявленное изобретение, технической задачей которого является создание нового способа для регистрации малошумного морского объекта с использованием медианной фильтрации в условиях наличия импульсных помех, случайных выбросов в тракте обработки сигналов, повышенного уровня и нестационарности фоновых шумов (помех).
Реализация поставленной технической задачи позволяет добиться следующего технического результата:
- создан новый способ для регистрации шумоизлучения малошумного морского объекта с использованием медианной фильтрации, позволяющий регистрировать шумоизлучение малошумного морского объекта в широкой полосе частот в условиях наличия импульсных помех, случайных выбросов в тракте обработки сигналов, повышенного уровня и нестационарности фоновых шумов (помех), который позволяет значительно повысить помехоустойчивость способа в целом при регистрации шумоизлучения малошумного морского объекта.
Для достижения указанного технического результата предложен «Способ регистрации малошумного морского объекта с использованием медианной фильтрации», заключающийся в том, что сначала регистрируют в приемных устройствах «опорную» амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства. После чего выполняют ее фильтрацию и аналого-цифровое преобразование в блоке первичной обработки сигналов, а затем используют в блоке расчета взаимно корреляционной функции и принятия решения блока вторичной обработки сигналов с целью определения и выбора пары приемных устройств с максимальным значением коэффициентов взаимной корреляции между первым и вторым, первым и третьим, … первым и N-м приемными устройствами. Затем «опорную» АЧХ подают на соответствующие входы адаптивного фильтра блока вторичной обработки сигналов, где вырабатывают «нормированную» АЧХ шумового поля охраняемого водного пространства. Далее при появлении малошумного морского объекта в охраняемом водном пространстве в области расположения приемных устройств формируют «рабочую» АЧХ водного пространства, которую через ранее выбранный первый приемный канал параллельно подают на первый вход блока расчета взаимно корреляционной функции и принятия решения и первый вход адаптивного фильтра блока вторичной обработки сигналов. В случае превышения амплитуды «рабочей» АЧХ водного пространства над выработанным порогом «нормированной» АЧХ регистрируют АЧХ малошумного морского объекта. При этом в первом, втором и N-м приемных каналах блока первичной обработки сигналов после выполнения аналого-цифрового преобразования дополнительно осуществляют медианную фильтрацию посредством использования соответствующих медианных фильтров.
Предложенный способ реализуется в устройстве, содержащем идентичные приемные устройства блока приема, включающие последовательно соединенные соответствующие идентичные подводные устройства (1, 2-N) и соответствующие идентичные блоки согласования (1, 2-N) с возможностью передачи принятого сигнала на вход блока первичной обработки сигналов. В него входят аналогичные первый, второй и N-й приемные каналы, включающие последовательно соединенные соответствующие идентичные блоки фильтров, соответствующие идентичные аналого-цифровые преобразователи, а также соответствующие идентичные медианные фильтры. Выход первого медианного фильтра блока первичной обработки сигналов параллельно соединен с первым входом блока расчета взаимно корреляционной функции и принятия решения и с первым входом адаптивного фильтра, расположенных в блоке вторичной обработки сигналов. Выход второго медианного фильтра блока первичной обработки сигналов последовательно соединен со вторым входом блока расчета взаимно корреляционной функции и принятия решения блока вторичной обработки сигналов. Выход N-го медианного фильтра блока первичной обработки сигналов последовательно соединен с N-м входом блока расчета взаимно корреляционной функции и принятия решения блока вторичной обработки сигналов. В зависимости от полученных результатов в блоке расчета взаимно корреляционной функции и принятия решения выбирается из приемных каналов (2.2-2.N) такой приемный канал, который соответствует максимальному значению коэффициента взаимной корреляции с первым приемным каналом и последовательно подключается с выхода блока расчета взаимно корреляционной функции и принятия решения на второй вход адаптивного фильтра, выход которого последовательно соединен с входом амплитудного детектора. Выход амплитудного детектора последовательно соединен через регистрирующее устройство с входом блока отображения информации. Предложенный способ экспериментально обоснован.
Результаты экспериментальных исследований
С целью проверки эффективности применения медианной фильтрации при регистрации малошумного морского объекта с использованием принципов адаптивной обработки гидроакустических сигналов в условиях повышенного уровня индустриальных нестационарных шумов и наличия помех импульсного характера были проведены экспериментальные исследования в закрытой мелководной бухте. В качестве малошумного морского объекта выступал автономный необитаемый подводный аппарат (АНПА).
Схема проведения экспериментальных исследований изображена на фиг. 1. На схеме приведены: маршрут движения АНПА с указанием точек погружения и всплытия, взаимное расположение приемных устройств ПУ №1, ПУ №2 и стационарного лабораторного модуля с аппаратурой приемного тракта и обработки сигналов.
Методика проведения исследований предполагала:
- выбор места установки приемных устройств (ПУ);
- регистрация шумоизлучения АНПА при движении его по маршруту в подводном положении;
- обработка полученных записей без использования адаптивной схемы компенсации помех;
- обработка полученных записей с использованием адаптивной схемы компенсации помех;
- обработка записей с использованием медианной фильтрации и адаптивной схемы компенсации помех.
Одно ПУ (ПУ №1) использовалось как измерительное, а второе ПУ (ПУ №2) было выставлено в качестве опорного, с целью записи фоновых шумов акватории для последующей адаптивной обработки сигналов. Выбор точки установки ПУ №2 выбирался исходя из результатов ранее проведенных экспериментальных исследований, а именно:
- коэффициент корреляции по помехе между сигналами с ПУ №1 и ПУ №2 должен быть достаточно высок;
- расстояние между ПУ №1 и ПУ №2 должно быть таким, чтобы уровень исследуемого сигнала на опорном ПУ (ПУ №2) был минимален.
Исходя из этих соображений, были выбраны точки, указанные на фиг. 1 как ПУ №1 и ПУ №2.
Далее производилась регистрация шумоизлучения АНПА при движении его по маршруту в подводном положении.
На фиг. 2 приведены сонограмма и спектр шумоизлучения, зарегистрированные при движении АНПА по маршруту движения с выхода ПУ №1.
Из анализа фиг. 2 видно, что кроме дискретных составляющих (ДС), присущих шумоизлучению АНПА, в спектре зарегистрированного с выхода ПУ №1 сигнала присутствуют ДС, не имеющие отношения к исследуемому объекту. Кроме того, в моменты времени, близкие к 13 и 26 минутам, на сонограмме отчетливо заметны широкополосные импульсные помехи.
С целью исключения мешающих фоновых помех в схеме обработки был использован адаптивный фильтр, основанный на алгоритме LMS (Least Mean Square). Этот алгоритм предполагает минимизацию среднеквадратической ошибки помехи на выходе адаптивного фильтра при подаче на один его вход «сигнал + помеха» (сигнал с ПУ №1), а на второй вход «помехи» (опорный сигнал с ПУ №2). Алгоритм LMS основан на принципе минимизации градиента мгновенного значения ошибки между опорным и входным сигналом при использовании метода наименьших квадратов. При этом выходной с фильтра сигнал сравнивается с опорным сигналом, а разность между измерительным и опорным каналами образует сигнал ошибки. Задача цифрового адаптивного фильтра - минимизировать ошибку воспроизведения опорного образцового сигнала. С этой целью блок адаптивного фильтра после обработки каждого отсчета анализирует сигнал ошибки и дополнительные данные, поступающие из цифрового фильтра, используя результаты этого анализа для подстройки параметров (весовых коэффициентов) фильтра.
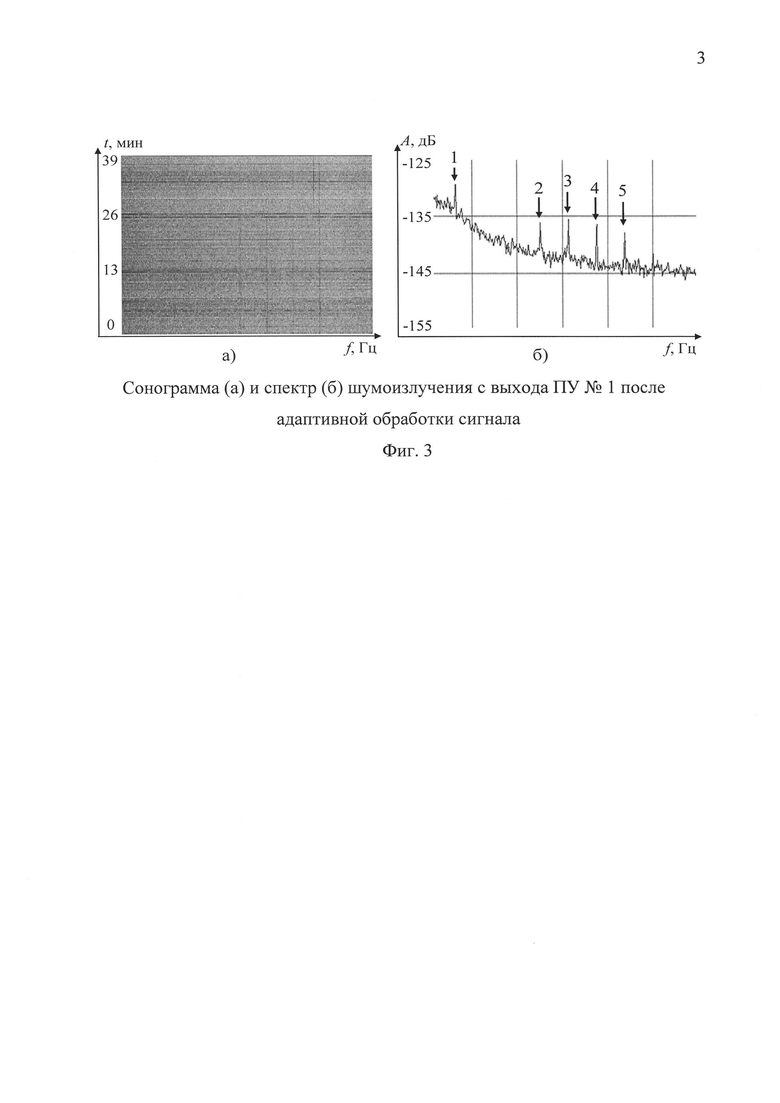
На фиг. 3 приведены сонограмма и спектр шумоизлучения, зарегистрированные при движении АНПА по маршруту движения с выхода ПУ №1 после использования адаптивной обработки сигнала.
Из анализа фиг. 3 видно, что адаптивная обработка позволяет более четко выделить ДС шумоизлучения АНПА с подавлением фоновых нестационарных помех и шумов мелководного моря. При этом в моменты времени, близкие к 13 и 26 минутам, на сонограмме так же видны широкополосные импульсные помехи.
Для исключения импульсных помех в схеме обработки сигнала был использован медианный фильтр, который на практике применяется как средство предварительной обработки цифровых данных. Специфической особенностью медианных фильтров является явно выраженная избирательность по отношению к элементам массива, представляющим собой немонотонную составляющую последовательности чисел в пределах окна (апертуры) фильтра и резко выделяющимся на фоне соседних отсчетов. В то же время на монотонную составляющую последовательности медианный фильтр не действует, оставляя ее без изменений. Это свойство позволяет применять медианную фильтрацию для устранения аномальных значений в массивах данных, уменьшения выбросов и импульсных помех. В случаях, когда перепады значений сигналов велики по сравнению с дисперсией аддитивного белого шума, медианный фильтр дает меньшее значение среднеквадратической ошибки по сравнению с оптимальными линейными фильтрами. Особенно эффективным медианный фильтр оказывается при очистке сигналов от импульсных шумов и случайных аномальных по величине выбросов при обработке изображений, акустических сигналов, передаче кодовых сигналов и т.п.
Медианная фильтрация реализуется в виде процедуры локальной обработки отсчетов в скользящем окне, которое включает определенное число отсчетов сигнала (апертура фильтра). На практике апертура фильтра для упрощения алгоритмов обработки данных, как правило, устанавливается с нечетным числом отсчетов. Для каждого положения окна выделенные в нем отсчеты ранжируются по возрастанию или убыванию значений. Средний по своему положению отчет в ранжированном списке называется медианой рассматриваемой группы отсчетов. Этим отсчетом заменяется центральный отсчет в окне для обрабатываемого сигнала. В силу этого медианный фильтр относится к числу нелинейных фильтров, заменяющим медианным значением аномальные точки и выбросы независимо от их амплитудных значений, и является устойчивым по определению, способным аннулировать даже бесконечно большие отсчеты.
На фиг. 4 представлены сонограмма и спектр сигнала шумоизлучения АНПА на фоне шумов акватории с выхода измерительного гидрофона, после введения в схему обработки медианного фильтра.
Анализ сонограмм, приведенных на фиг. 3, а и фиг. 4, а, показывает, что дополнительное использование медианного фильтра в схеме обработки сигнала может привести к значительному снижению широкополосной помехи и ее стационаризации. При этом сравнение осредненных за одинаковое количество времени спектров, приведенных на фиг. 3, 6 и фиг.4, 6, показывает, что уровень дискретных составляющих шумоизлучения АНПА увеличился на величину до 3 дБ, что равнозначно повышению помехоустойчивости способа регистрации малошумного морского объекта в целом.
Полученные экспериментальным путем результаты свидетельствуют о целесообразности использования медианной фильтрации при осуществлении способа регистрации шумоизлучения малошумного морского объекта в условиях наличия импульсных помех, случайных выбросов в тракте обработки сигналов, повышенного уровня и нестационарности фоновых шумов (помех).
Принципиальным отличием заявленного изобретения от прототипа является то, что заявленный способ реализован в предложенном устройстве для регистрации малошумного морского объекта с использованием медианной фильтрации, которое дополнительно содержит в первом, втором и N-м приемных каналах блока первичной обработки сигналов первый, второй и N-й медианные фильтры соответственно.
Такое конструктивное решение изобретения за счет отличительного признака дало новый технический эффект. Применение медианной фильтрации в приемных каналах блока первичной обработки сигналов посредством использования идентичных медианных фильтров расширило возможности изобретения, в результате которого заявленный способ обладает повышенной помехоустойчивостью относительно рассматриваемого прототипа при регистрации малошумного морского объекта в условиях наличия помех импульсного характера и случайных аномальных выбросов в тракте обработки сигналов.
Схема устройства для регистрации малошумного морского объекта с использованием медианной фильтрации приведена на фиг. 5.
На схеме представлено:
1. Блок приема
1.1 Первое приемное устройство
1.1.1 Первое подводное устройство
1.1.2 Первый блок согласования
1.2 Второе приемное устройство
1.2.1 Второе подводное устройство
1.2.2 Второй блок согласования
1.N. N-e приемное устройство
1.N. 1 N-e подводное устройство
1.N.2 N-й блок согласования
2. Блок первичной обработки сигналов
2.1 Первый приемный канал
2.1.1 Первый блок фильтров
2.1.2 Первый аналого-цифровой преобразователь
2.1.3 Первый медианный фильтр
2.2 Второй приемный канал
2.2.1 Второй блок фильтров
2.2.2 Второй аналого-цифровой преобразователь
2.2.3 Второй медианный фильтр
2.N N-й приемный канал
2.N.1 N-й блок фильтров
2.N.2 N-й аналого-цифровой преобразователь
2. N.3 N-й медианный фильтр
3. Блок вторичной обработки сигналов
3.1 Блок расчета взаимно корреляционной функции и принятия решения
3.2 Адаптивный фильтр
4. Амплитудный детектор
5. Регистрирующее устройство
6. Блок отображения информации.
Все конструктивные элементы в блоке приема 1, в блоке первичной обработки сигналов 2, в блоке вторичной обработки сигналов 3, а также амплитудный детектор 4, регистрирующее устройство 5 и блок отображения информации 6 соединены электрическими связями. В блоке приема 1 сформировано идентичное количество приемных устройств 1.1, 1.2…1.N, использующих в своем составе в качестве подводного устройства 1.1.1, 1.2.1…1.N.1 идентичный принимающий электроакустический элемент с возможностью приема акустических сигналов в водной среде, выход каждого из которых последовательно соединен с входом соответствующего блока согласования, служащего для согласования принятых подводными устройствами акустических сигналов в электрические для передачи на входы соответствующего идентичного блока фильтров 2.1.1, 2.2.1…2.N.1, входящего в состав идентичных приемных каналов 2.1, 2.2, … 2.N блока первичной обработки сигналов 2.
В блоке первичной обработки сигналов 2 выход каждого соответствующего идентичного блока фильтров 2.1.1, 2.2.1…2.N.1 последовательно соединен с входом соответствующего идентичного аналого-цифрового преобразователя 2.1.2, 2.2.2…2.N.2 для возможности пропускания передающегося электрического сигнала оптимальной полосы частот. Выход каждого аналого-цифрового преобразователя 2.1.2, 2.2.2…2.N.2 последовательно соединен с соответствующим первым, вторым и N-м входом медианного фильтра 2.1.3, 2.2.3…2.N.3 для преобразования сигналов в цифровой вид. После обработки сигналов медианным фильтром и исключения из тракта аномальных отсчетов импульсных помех выход первого медианного фильтра 2.1.3 параллельно соединен с первым входом блока расчета взаимно корреляционной функции и принятия решения 3.1 и с первым входом адаптивного фильтра 3.2, а выход каждого медианного фильтра 2.2.3...2.N.3 последовательно соединен с соответствующим вторым и N-м входом блока расчета взаимно корреляционной функции и принятия решения 3.1 блока вторичной обработки сигналов 3.
В блоке расчета взаимно корреляционной функции и принятия решения 3.1 производится вычисление и определение пары приемных устройств с максимальным значением коэффициентов корреляции между первым и вторым, первым и третьим, … первым и N-м приемными устройствами. В зависимости от вычисленного значения соответствующий выход медианного фильтра приемного канала 2.2…2.N последовательно подключается ко второму входу адаптивного фильтра 3.2, на выходе которого вырабатывается АЧХ регистрируемого малошумного морского объекта, которая последовательно подается на вход амплитудного детектора 4. Выход амплитудного детектора 4 последовательно соединен с входом регистрирующего устройства 5. Выход регистрирующего устройства 5 последовательно соединен с входом блока отображения информации 6.
Осуществление способа
Для осуществления заявленного способа устройство регистрации малошумного морского объекта с использованием медианной фильтрации снабжено общепринятым переносным или стационарным источником питания, расположенным на береговом посту или плавучем носителе. При работе подводные устройства 1.1.1, 1.2.1…1.N.1, в качестве которых использованы электроакустические элементы, широко используемые в гидроакустике, расположенные в различных точках подводного пространства охраняемой акватории принимают со всех направлений подводного пространства «опорную» АЧХ шумового поля охраняемого водного пространства.
Принимаемая «опорная» АЧХ шумового поля охраняемого водного пространства через соответствующие блоки согласования 1.1.2, 1.2.2…1.N.2 последовательно поступает на соответствующие идентичные приемные каналы 2.1, 2.2…2.N блока первичной обработки сигналов 2. Каждый идентичный приемный канал 2.1, 2.2…2.N включает в себя последовательно соединенные соответствующие блоки фильтров 2.1.1, 2.2.1....2.N.1, предназначенные для пропускания электрических сигналов оптимальной полосы частот, соответствующие аналого-цифровые преобразователи 2.1.2, 2.2.2…2.N.2, предназначенные для преобразования сигналов в цифровой вид, и соответствующие медианные фильтры 2.1.3, 2.2.3…2.N.3, используемые для исключения из тракта обработки аномальных отсчетов импульсных помех. «Опорная» АЧХ шумового поля охраняемого водного пространства с выхода первого медианного фильтра 2.1.3. первого приемного канала 2.1. блока первичной обработки сигналов 2 параллельно поступает на первый вход блока расчета взаимно корреляционной функции и принятия решения 3.1 и на первый вход адаптивного фильтра 3.2 блока вторичной обработки сигналов 3, а с выходов второго и N-го медианных фильтров 2.2.3…2.N.3 соответствующих приемных каналов 2.2…2.N «опорная» АЧХ последовательно передается на соответствующие входы блока расчета взаимно корреляционной функции и принятия решения 3.1 блока вторичной обработки сигналов 3, в котором производится вычисление максимальных значений коэффициентов взаимной корреляции между первым и вторым, первым и третьим, … первым и N-м приемными устройствами, с целью определения пары приемных устройств с максимальным значением коэффициентов взаимной корреляции между ними.
Вычисленный в блоке взаимно корреляционной функции и принятия решения 3.1 блока вторичной обработки сигналов 3 из пары необходимых приемных устройств, «второй» приемный канал будет последовательно подключен с выхода блока расчета взаимно корреляционной функции и принятия решения 3.1 на второй вход адаптивного фильтра 3.2. блока вторичной обработки сигналов 3, последний выполняющий функцию выработки «нормированной» АЧХ шумового поля охраняемого водного пространства. При появлении малошумного морского объекта в охраняемом водном пространстве в области расположения приемных устройств формируется «рабочая» АЧХ водного пространства, которая посредством электрической связи через ранее выбранный первый приемный канал подается на первый вход блока расчета взаимно корреляционной функции и принятия решения и на первый вход адаптивного фильтра. В случае превышения амплитуды «рабочей» АЧХ водного пространства над выработанным ранее порогом амплитуды нормированного сигнала производится регистрация АЧХ малошумного морского объекта. При этом во время вхождения малошумного морского объекта в охраняемое водное пространство будет соответственно меняться и величина порога срабатывания устройства. Таким образом, чувствительность устройства будет меняться при изменении величины принятой «опорной» АЧХ.
При появлении малошумного морского объекта в охраняемой акватории в принятом сигнале появляются составляющие с новой амплитудой. Новые амплитудные составляющие изменяют амплитудно-частотные характеристики области пространства охраняемой акватории. Полученный в адаптивном фильтре 3.2 разностный амплитудный сигнал последовательно поступает на вход амплитудного детектора 4 для выделения амплитудной огибающей. После этого продетектированный сигнал последовательно поступает на вход регистрирующего устройства 5 для регистрации и документирования полученных в результате исследования данных. Визуальное наблюдение принятого акустического сигнала происходит в блоке отображения информации 6, где происходит принятие решения о нахождении в исследуемой области малошумного морского объекта.
Заявленный способ представляет значительный интерес для народного хозяйства, так как реализуемое данным способом устройство обеспечивает охрану биологических и техногенных морских объектов. Заявленное решение не оказывает отрицательного воздействия на экологическое состояние окружающей среды.
Таким образом, заявленный «Способ регистрации малошумного морского объекта с использованием медианной фильтрации» является новым способом для оценки шумоизлучения морских объектов и для обеспечения защиты кораблей, судов в гаванях и портах, а также портовых и других подводных сооружений.
Заявленный способ обладает следующим достоинствами:
- повышение помехоустойчивости при регистрации малошумного морского объекта в условиях присутствия помех импульсного характера и случайных выбросов в тракте обработки сигналов;
- возможность увеличения точности выбора пары приемных каналов, необходимых для формирования «нормированной» и «рабочей» АЧХ.
Заявленный способ промышленно применим, так как для его осуществления используются широко распространенные компоненты и изделия радиотехнической промышленности и вычислительной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регистрации проходной характеристики морского объекта | 2021 |
|
RU2774731C1 |
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| Способ регистрации проходной характеристики морского объекта в мелководной акватории | 2022 |
|
RU2786039C1 |
| Способ регистрации уровня шумоизлучения морского объекта | 2017 |
|
RU2659186C1 |
| Способ регистрации шумоизлучения морского объекта | 2020 |
|
RU2746342C1 |
| Способ регистрации шумоизлучения морского подводного объекта | 2020 |
|
RU2746312C1 |
| Обнаружитель движущихся подводных объектов на фоне биологического шума мелководной акватории, где обитают раки-щелкуны | 2021 |
|
RU2779380C1 |
| Многоэлементный интерференционный обнаружитель движущегося подводного объекта | 2024 |
|
RU2837998C1 |
| Интерференционный обнаружитель движущегося подводного морского объекта с медианной фильтрацией сигнала | 2023 |
|
RU2809350C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2563140C1 |




Изобретение относится к области гидроакустики, а именно к способу регистрации шумоизлучения малошумного морского объекта. Техническим результатом изобретения является способ регистрации шумоизлучения малошумного морского объекта в широкой полосе частот с использованием медианной фильтрации, который может быть использован при измерении первичного гидроакустического поля малошумных морских объектов в условиях наличия импульсных помех, случайных выбросов в тракте обработки сигналов, повышенного уровня и нестационарности фоновых шумов (помех) в пределах времени регистрации прохода морского объекта, а также может быть использован в охранных устройствах для защиты морских акваторий, портовых и других сооружений. Согласно изобретению способ регистрации малошумного морского объекта с использованием медианной фильтрации заключается в том, что сначала регистрируют в приемных устройствах «опорную» амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства. После этого выполняют ее фильтрацию и аналогово-цифровое преобразование в блоке первичной обработки сигналов. Далее «опорную» АЧХ используют с целью определения пары приемных устройств в блоке расчета взаимно корреляционной функции и принятия решения блока вторичной обработки сигналов, а затем подают на соответствующие входы адаптивного фильтра блока вторичной обработки сигналов, где вырабатывают «нормированную» АЧХ шумового поля охраняемого водного пространства. При появлении малошумного морского объекта в охраняемом водном пространстве в области расположения приемных устройств формируют «рабочую» АЧХ водного пространства, которую через ранее выбранный первый приемный канал подают на первый вход блока расчета взаимно корреляционной функции и принятия решения и первый вход адаптивного фильтра блока расчета вторичной обработки сигналов. При превышении амплитуды «рабочей» АЧХ водного пространства над выработанным порогом нормированной АЧХ регистрируют АЧХ малошумного морского объекта. Принципиальным отличием заявленного изобретения является то, что в заявленном способе, реализованном в предложенном устройстве для регистрации малошумного морского объекта с использованием медианной фильтрации после выполнения аналого-цифрового преобразования в приемных каналах блока первичной обработки сигналов дополнительно осуществляют медианную фильтрацию посредством использования соответствующих идентичных медианных фильтров, в результате чего появляется возможность подавления импульсных помех и случайных выбросов в тракте обработки сигналов, что позволяет значительно повысить помехоустойчивость при регистрации малошумного морского объекта. 5 ил.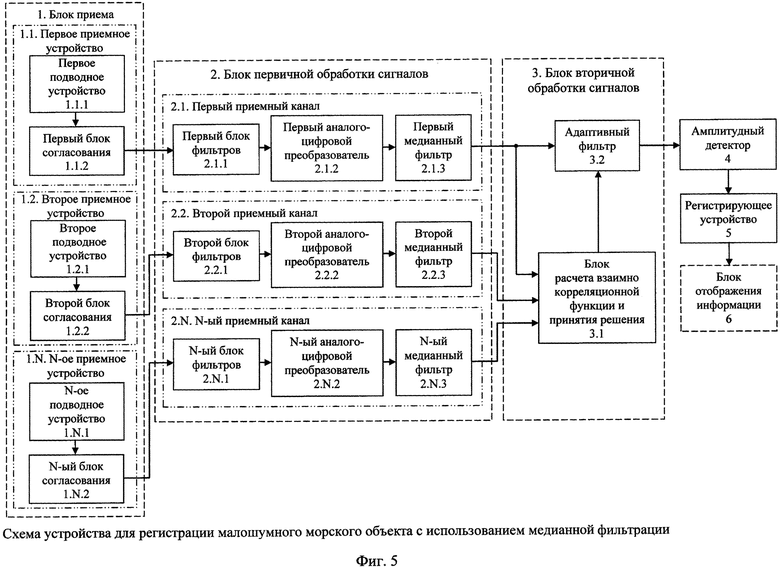
Способ регистрации малошумного морского объекта с использованием медианной фильтрации, заключающийся в том, что сначала регистрируют в приемных устройствах «опорную» амплитудно-частотную характеристику (АЧХ) шумового поля водного пространства, после этого выполняют ее фильтрацию и аналогово-цифровое преобразование в блоке первичной обработки сигналов, а затем используют в блоке расчета взаимно корреляционной функции и принятия решения блока вторичной обработки сигналов с целью определения и выбора пары приемных устройств с максимальным значением коэффициентов взаимной корреляции между первым и вторым, первым и третьим, … первым и N-м приемными устройствами; затем «опорную» АЧХ подают на соответствующие входы адаптивного фильтра блока вторичной обработки сигналов, где вырабатывают «нормированную» АЧХ шумового поля охраняемого водного пространства; далее при появлении малошумного морского объекта в охраняемом водном пространстве в области расположения приемных устройств формируют «рабочую» АЧХ водного пространства, которую через ранее выбранный первый приемный канал подают на первый вход блока расчета взаимно корреляционной функции и принятия решения и первый вход адаптивного фильтра блока вторичной обработки сигналов; в случае превышения амплитуды «рабочей» АЧХ водного пространства над выработанным порогом «нормированной» АЧХ регистрируют АЧХ малошумного морского объекта, отличающийся тем, что в первом, втором и N-м приемных каналах блока первичной обработки сигналов после выполнения аналого-цифрового преобразования дополнительно осуществляют медианную фильтрацию посредством использования соответствующих медианных фильтров.
| СПОСОБ РЕГИСТРАЦИИ МАЛОШУМНОГО МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2572052C2 |
| Беате Мефферт, Олаф Хохмут | |||
| Современные методы обработки сигналов - основы, приложения и задачи | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| стр | |||
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| Новиков А.К | |||
| Статистические измерения и обнаружение сигналов | |||
| - СПб.: ЦНИИ им | |||
| акад | |||
| А.Н | |||
| Крылова, 2006 г., с | |||
| Двухколейная подвесная дорога | 1919 |
|
SU151A1 |
| US4173008 A1, 30.10.1979. | |||

