Изобретение относится к пожарной технике и может быть использовано для тушения пожаров на объектах утилизации боеприпасов, объектах хранения пожаро- и взрывоопасных материалов.
Специфичность свойств боеприпасов и пиротехнических материалов требует специальной пожарной тактики при организации тушения пожаров [1]. Основными факторами, влияющими на эффективность тушения подобных пожаров, является оперативность воздействия на очаг возгорания, достаточность орошения огнегасящим (гасящим) составом (жидкостью), в качестве которого рекомендуется использовать воду [1], очага возгорания. По этой причине для тушения подобных пожаров используют лафетные пожарные установки (лафетные стволы) [2, 3]. Такие установки позволяют получить максимальную дальность полета струи, что позволяет находиться боевым расчетам на относительно безопасном расстоянии от очага возгорания, поскольку в ходе процесса горения укупорки велика вероятность взрыва боеприпасов [1, 4]. По этой причине находят все более широкое применение мобильные роботизированные установки пожаротушения [5]. Однако такие установки, как правило, имеют недостаточный запас огнегасящего состава. Применяемые на пожарных машинах лафетные стволы управляются вручную оператором-пожарником, и наибольшая дальность полета огнегасящей (водяной) струи оставляет желать лучшего.
Наибольшая дальность полета водяной (гасящей) струи, направляемой из лафетного ствола на очаг пожара, зависит от диаметра насадка ствола и давления в магистрали подвода воды. При этом существуют предельные значения этих параметров, при превышении которых эффект увеличения наибольшей дальности полета струи отсутствует [6]. В струе выделяют две части - компактную и раздробленную. При тушении пожаров струи могут иметь различные углы наклона. Схема наклонной струи приведена на фиг.1. Компактная часть струи при изменении угла наклона описывает траекторию а,b,c, траекторию а', b',с' называют огибающей кривой раздробленной струи. Расстояние по прямой от насадка до граничных кривых называется радиусом действия компактной струи Rk и радиусом действия раздробленной струи Rρ, который увеличивается с уменьшением угла наклона α радиуса Rk к горизонту
Практика показывает [6], что наибольшая дальность полета струи определяется длиной компактной части струи: увеличение длины компактной части струи увеличивает дальность полета струи. Коэффициент поверхностного натяжения, коэффициент вязкости струи являются основными параметрами, влияющими на устойчивость структуры свободной гидравлической струи, варьируя которыми можно увеличить наибольшую дальность полета струи [6]. Изменить коэффициент поверхностного натяжения и вязкость воды в струе можно путем добавления в нее незначительного количества ингибиторов.
Другим параметром, характеризующим эффективность системы пожаротушения, является достаточность плотности орошения очага возгорания, которая зависит от расходной характеристики лафетного ствола и пожарной нагрузки, приходящейся на единицу площади очага возгорания. Практика показывает, что при тушении пожаров расчетное количество воды является недостаточным и, как правило, значительно бывает превышено [1, 7]. Во многом это определяется неравномерностью распределения подаваемой на тушение пожара воды по площади пятна орошения, для которого в первом приближении можно принять эллипсовидную форму. При фиксированном угле наклона струи, при постоянном давлении перед лафетным стволом, поворачивая с постоянной угловой скоростью лафетный ствол по азимуту на какой-либо угол, можно получить некий кольцевой сектор орошения. При этом дальняя и ближняя кольцевые зоны сектора орошения из-за вытянутости в радиальном направлении эллипса орошения имеют значительно меньшую плотность орошения. Повысить равномерность плотности орошения по всей зоне орошения можно путем организации зоны орошения в виде нескольких последовательно расположенных в радиальном направлении эллипсовидных пятен орошения, как это показано на примере трех пятен на фиг.2. При этом пятна орошения частично накладываются друг на друга, что позволяет повысить концентрацию подачи гасящей жидкости в пересекающиеся области пятен орошения. Пятна орошения могут быть сформированы несколькими лафетными стволами, расположенными в одной вертикальной плоскости, путем варьирования давлений воды в каждом из стволов, углом наклона отдельного ствола к горизонту, диаметром насадка, величиной ингибиторных добавок в каждый из отдельных стволов. Ожидаемая схема орошения очага возгорания из трех лафетных стволов приведена на фиг.3.
При орошении очага возгорания с большого расстояния важной характеристикой эффективности такого орошения является обеспечение эффективного позиционирования пятна орошения на площади очага возгорания, для чего в ходе тушения пожара необходимо определять, на плоскости очага возгорания, координаты положения пятна орошения. Координаты положения пятна орошения (пятен орошения) могут быть определены по показаниям оптических дальномеров исходя из их геометрического положения и замеров расстояний от их объективов до характерных точек очага возгорания. Эти параметры могут быть использованы как для телеметрического управления системой пожаротушения, так и для ручного управления работой как отдельных стволов, так и всех лафетных стволов. Типичная схема тушения пожара с помощью трех лафетных стволов, расположенных в одной вертикальной плоскости, представлена на фиг.3.
Таким образом, предлагается способ тушения пожаров на объектах хранения, снаряжения и утилизации взрывоопасных материалов (пиротехнические составы, боеприпасы), состоящий в использовании для тушения пожаров мобильных телеуправляемых (дистанционно управляемых), по аналогии с беспилотными летательными аппаратами, пожарных комплексов с несколькими лафетными стволами. Тушение возгорания производится за счет создания на очаге возгорания каждым из стволов своего пятна орошения, которые последовательно расположены друг за другом в радиальном направлении от лафетных стволов к месту орошения и имеют общие зоны наложения пятен орошения друг на друга. При этом положение пятен орошения на очаге орошения определяется позиционированием каждого отдельного лафетного ствола по азимутальному углу и углу возвышения над линией горизонта, а также физическими характеристиками свободных водяных струй, которые могут быть изменены путем введения в струи ингибиторных добавок, влияющих на коэффициент поверхностного натяжения и коэффициент вязкости воды, а также изменением давления в каждом лафетном стволе. Позиционирование каждого отдельного пятна орошения осуществляется с помощью дальномеров.
Однако, как показывает практика, обеспечить последовательное расположение пятен орошения с необходимым перекрытием пятен является достаточно трудной технической задачей из-за взаимодействия струй в зонах контакта (позиции I и II на фиг.3) и из-за определенной динамической неустойчивости отдельной струи [1, 7]. Поэтому более привлекательным является при использовании нескольких лафетных стволов формирование независимых и невзаимодействующих друг с другом пятен орошения, как это показано на фиг.4, на примере образования четырех зон орошения, создаваемых в очаге возгорания. При этом зоны орошения могут быть образованы попарно за счет двух лафетных стволов, работающих в одной вертикальной плоскости. Более того, ввиду значительного расстояния от лафетных стволов до очага орошения, можно пренебречь различием в геометрических параметрах зон орошения от каждого из лафетных стволов. Своеобразное шахматное попарное позиционирование пятен орошения друг относительно друга, как это показано на фиг.4, позволит при перемещении пятен орошения обеспечить более равномерное орошение очага возгорания. Тем самым, попарное позиционирование пятен орошения определяет критерий четности узлов подачи (лафетных стволов) гасящей жидкости в очаг возгорания. Это, в свою очередь, определяет целесообразность размещения лафетных стволов вдоль бортов ходовой части (транспортного шасси) установки пожаротушения.
Таким образом, устройство для осуществления предлагаемого способа тушения очага возгорания в отличие от известных роботизированных пожарных комплексов должно иметь не один, а несколько лафетных стволов, причем возвышение лафетных стволов над плоскостью горизонта должно происходить попарно в одной вертикальной плоскости. Для создания цепочки пятен орошения, когда каждое пятно создается своим лафетным стволом, параметры каждой водяной струи должны существенно отличаться от параметров других струй. Этого можно добиться за счет различных углов установки каждого ствола относительно плоскости горизонта, причем эти углы должны быть синхронизированы друг с другом с помощью устройств согласования. При этом позиционирование каждого отдельного ствола по углу азимута и по углу возвышения над линией горизонта производится с помощью силовых приводов.
Длина компактной части свободной водяной пожарной струи определяет максимальную дальность положения пятна орошения. Устойчивость свободной водяной струи определяется во многом коэффициентом поверхностного натяжения и коэффициентом динамической вязкости жидкости, причем добавка в состав воды небольшого количества специальных добавок (ингибиторов) позволяет изменить эти характеристики. Применяя специальные дозаторы ингибиторов, можно организовать поступление в необходимом количестве ингибиторов на вход трубопровода подачи воды для каждого отдельного лафетного ствола.
При использовании мобильных установок нецелесообразно использовать стационарную систему пожарного водоснабжения: резервуар с водой должен быть установлен на ходовую часть установки или располагаться в прицепе к установке. Подача воды в лафетные стволы должна быть осуществлена насосами, причем целесообразно организовать подачу воды в каждый лафетный ствол своим насосом. Такое решение позволяет управлять расходом и давлением подачи для каждого лафетного ствола. При использовании многоствольных лафетных установок нецелесообразно использовать для каждого насоса свой индивидуальный привод: силовой привод, как следует из фиг.4, может быть один на отдельную (каждую) пару насосов. Такую конструктивно-компоновочную схему имеет турбонасосный агрегат (ТНА) жидкостных ракетных двигателей (ЖРД) [8]. В конструкциях ТНА, как правило, на одном валу находятся два насоса с крыльчатками для подачи в камеру сгорания окислителя и горючего, и турбина. Турбина раскручивается за счет специального газогенератора. Для некоторых ТНА применяется схема с тремя насосами - для подачи окислителя, пускового горючего, основного горючего [8].
В монографии [9] рассмотрены варианты использования элементов и узлов снимаемых с вооружения ракет с ЖРД в конструкциях энергетических установок гражданского назначения. В рамках конверсионного использования элементов двигательных установок утилизируемых ракет с ЖРД перспективным является использование турбонасосных агрегатов (ТНА) в качестве насосной станции для многоствольной лафетной установки, причем каждый ТНА обслуживает одну пару лафетных стволов. Рабочее тело (горячий газ), подаваемое на лопатки турбины ТНА, производится газогенератором, в качестве которого может быть взят бензовоздушный газогенератор. Управляя диаметрами проходных сечений на входах в каждый из насосов, можно менять расходные характеристики каждого из стволов, что будет проявляться в изменении напора воды на входе в каждый из лафетных стволов. Варьируя подачей рабочего тела на турбину ТНА, управляя работой газогенератора (бензовоздушного газогенератора) отдельного ТНА, также можно управлять параметрами соответствующих лафетных стволов. Добавляя через специальные дозаторы в каждый тракт подачи воды либо в насосы, либо на выходе из насосов, ингибиторы, влияющие на коэффициент поверхностного натяжения и коэффициент вязкости воды, дополнительно можно изменять параметры каждой лафетной струи (наибольшую дальность полета струи).
Для обеспечения определенной последовательности пятен орошения очага возгорания, как показано на фиг.2 или фиг.4, каждый из лафетных стволов, как отмечалось выше, имеет свой силовой привод для установки ствола под необходимым углом к плоскости горизонта. Установка каждого ствола под необходимым углом к плоскости горизонта определяется исходя из позиционирования очага возгорания на охраняемой площади, что осуществляется с помощью системы инфракрасных датчиков обнаружения возгорания, видеодатчиков-дальномеров, т.е. оптической системы оценки позиционирования очага возгорания относительно роботизированной установки (роботизированный комплекс) пожаротушения. Далее эту систему будем назвать системой видеодатчиков-дальномеров, поскольку инфракрасные датчики также могут выполнять функции дальномеров, а системы ночного видения являются, фактически, системами инфракрасного видения.
Управление работой установки осуществляется через централизованный процессор, который управляет как работой систем и узлов роботизированной пожарной установки, так и перемещением установки по охраняемой территории. При этом роботизированный пожарный комплекс может быть как абсолютно автоматизированным, так и телеуправляемым по радиоканалам. В последнем случае управление пожарным комплексом осуществляется оператором по аналогии с тем, как управляются беспилотные летательные аппараты пилотами-операторами, находящимися на земле за многие сотни километров от летательного аппарата.
Схема роботизированной пожарной установки приведена на фиг.5. Установка состоит из силовой платформы 1, установленной на ходовую часть 2 с силовым приводом, не показанным на фиг.5. На силовой платформе 1 перпендикулярно ее плоскости установлены стойки 3 и 4, на которых с помощью шарниров, не обозначенных на фиг.5 специальными позициями, установлены в одной плоскости для каждой из стоек лафетные стволы. Стойки имеют возможность вращения вокруг своих продольных осей за счет управляемых силовых приводов, не обозначенных на фиг.5 отдельными позициями. А сами вертикальные стойки закреплены на салазках, соответственно, 5 и 6, имеющих силовые приводы, которые не показаны отдельными позициями на фиг.5, для их перемещения по направляющим 7 вдоль ходовой части 2. При этом направляющие 7 проложены вдоль бортов транспортной базы 2, что позволяет обеспечить шахматное расположение зон орошения очага возгорания при работе установки, как это показано на фиг.4. Лафетные стволы на фиг.5 обозначены позициями 8, 9, 10, 11, угол установки каждого из которых относительно плоскости горизонта обеспечивается с помощью соответствующих для каждого ствола силовых приводов 12 - 15. Вода (гасящий раствор жидкости) подается в лафетные стволы из емкости 16 по отдельным патрубкам для каждого ствола 18-21. В каждый из патрубков встроено запорное устройство (электропневмоклапан), обозначенные на фиг.5 позициями 22-25. Каждый из патрубков 18-21 формирует магистраль подачи гасящей жидкости в соответствующий центробежный насос, обозначенные на фиг.5 позициями 26, 27 и 28, 29. Рабочие колеса центробежных насосов попарно насажены на один вал, на который насажены и соответствующие турбины силовых приводов насосов, обозначенные на фиг.5 позициями 30 и 31.
Фактически два насоса с турбиной образуют турбонасосный агрегат (ТНА), который широко используется в жидкостных ракетных двигателях [8, 9]. Рабочее тело (горячий газ) для турбин 30 и 31 производится в соответствующих газогенераторах (бензовоздушных газогенераторах) 32 и 33. На выходе из насосов по магистралям 35 - 38 гасящий раствор (вода) поступает в соответствующие пожарные стволы 12 - 15, причем в эти магистрали встроены дозаторы ингибиторов, обозначенные на фиг.5 позициями 39 - 42, для изменения таких физических характеристик в струях воды, как коэффициент поверхностного натяжения и коэффициент вязкости регуляторы расхода. В магистрали 35-38 подвода гасящей жидкости в лафетные стволы встроены регуляторы расхода жидкости, обозначенные на фиг.5 соответствующими позициями 43 - 46, а каждый из регуляторов расхода 43 - 47 имеет соответствующие силовые приводы, обозначенные на фиг.5 позициями 47 - 50. В дозаторы ингибиторов, обозначенные на фиг.5 позициями 39 - 42, раствор-присадка (ингибитор) подается по трубопроводу, обозначенному на фиг.5 позицией 51 из емкости 52 с поверхностно-активным веществом (ингибитором).
Расход гасящего состава (воды) можно регулировать управляя работой соответствующего газогенератора (бензовоздушного газогенератора) 32 или 33, меняя расходные характеристики компонентов топлива (бензин и воздух), подаваемых в бензовоздушный газогенератор. Узел регулирования процессом образования рабочего тела в газогенераторах (бензовоздушных газогенераторах) 32 и 33 на фиг.5 обозначен позицией 34. Управление работой силовых приводов 12 - 15 лафетных стволов 8 - 11, силовых приводов 47 - 50, регуляторов расхода 43 - 46, силовых приводов салазок 5 и 6, силовых приводов поворота относительно продольной оси стоек 3 и 4, для их поворота на азимутальный угол φ, работой электропневмоклапанов 22 - 25, узлом регулирования 34 работой газогенераторов 32 и 33 осуществляется центральным процессором, обозначенным на фиг.5 позицией П.
Процессор П также управляет работой дозаторов-ингибиторов 39 42, и силовым приводом самой роботизированной установки пожаротушения, который не обозначен на фиг.5 отдельной позицией. Тем самым, процессор П коммутативно связан со всеми силовыми приводами роботизированной установки пожаротушения. Для определения очага возгорания и его позиционирования на площади охраняемого объекта на мачте 53 установлены инфракрасные датчики, позволяющие обнаружить возгорание, и видеодатчики-дальномеры, которые в совокупности формируют систему видеодатчиков-дальномеров. Такая система позволяет провести позиционирование очага возгорания, которая на фиг.5 обозначена одной позицией 54 и коммутативно также связана с центральным процессором П роботизированной установки пожаротушения. Телерадиоуправление работой роботизированной установки пожаротушения осуществляется оператором по каналам радиосвязи, для чего установка пожаротушения имеет приемопередающую антенну 55, либо управление работой установки осуществляется в автономном режиме процессором П.
Работает роботизированная установка пожаротушения следующим образом.
Роботизированная установка пожаротушения в снаряженном виде с заполненной гасящей жидкостью (гасящим составом) емкостью 16, с заполненной емкостью 52 ингибиторами, т.е. поверхностно-активными веществами (ПАВ), с заправленными топливными баками располагается на территории охраняемой зоны. Находясь в режиме ожидания, роботизированная пожарная установка системой датчиков 54 обнаружения очага возгорания и его позиционирования на охраняемой территории производит сканирование охраняемой территории. По факту обнаружения очага возгорания процессор П, исходя из геометрических параметров взаимного расположения датчиков 54 друг относительно друга (η1,η2), угловых координат их позиционирования (θ1,θ2), дальности до очага возгорания и его геометрических параметров, определяет тактику тушения пожара - алгоритм выдвижения роботизированной установки пожаротушения на боевую позицию. Такое решение может принять и оператор установки, между рабочим местом которого и роботизированной установкой пожаротушения осуществляется постоянная телерадиосвязь посредством антенны 55.
Далее производится запуск двигателя роботизированной пожарной установки и происходит ее выдвижение на боевую позицию. Процессом выдвижения роботизированной пожарной установки на боевую позицию руководит либо оператор, либо этот процесс происходит автономно в соответствии с командами, вырабатываемыми процессором П. По прибытии на боевую позицию процессор роботизированной пожарной установки или оператор-пилот установки с учетом показаний датчиков 54 производит подготовку установки к боевым действиям, к тушению пожара. Для этого за счет силовых приводов, не обозначенных на фиг.5 отдельными позициями, производится поворот стоек 3 и 4 на необходимые азимутальные углы φ1, φ2, чтобы плоскости расположения лафетных стволов 8-11 пересекали бы наиболее опасные зоны очага возгорания. С этой же целью с помощью соответствующих силовых приводов осуществляется перемещение салазок 5 и 6 по направляющим 7. После выбора позиций стоек 3 и 4 их положение фиксируется. Далее с учетом показаний датчиков 54 и особенностей их взаимного расположения и позиционирования очага возгорания центральным процессором П или пилотом-оператором с помощью силовых приводов 12-15 устанавливаются необходимые углы возвышения лафетных стволов 8 - 11. Аналогичным образом с помощью силовых приводов 47 - 50 устанавливаются площади проходных сечений регуляторов расхода 43 - 46, а так же производится настройка дозаторов ингибиторов 39-42. Далее с помощью системы запуска и регулирования подачи компонентов топлива 34 в газогенераторы (бензовоздушные газогенераторы) 32 и 33 производится их запуск. Вырабатываемые газогенераторами (бензовоздушными газогенераторами) 32 и 33 горячие газы (рабочие тела) поступают на лопатки турбины 31 и 30 турбонасосного агрегата, раскручивая валы, на которые они насажены. Для каждого из ТНА, раскручивая его вал, соответствующая турбина 30 или 31 раскручивает и соответствующие рабочие колеса насосов 26, 27 и 28, 29, поскольку они жестко насажены на один вал, которые не обозначены отдельной позицией на фиг.5, общий как для насосов, так и для турбины. Срабатывают электропневмоклапаны 22 - 25, открывая подачу гасящей смеси (воды) из емкости 16 во входные патрубки насосов. Насосы 26, 27 и 28, 29 по патрубкам 18, 19 и 20, 21, соответственно, забирают гасящий раствор (воду) из емкости 16 и подают его по соответствующим магистралям подвода 35-38 в соответствующие лафетные стволы 8-11. При этом в каждый из лафетных стволов гасящая жидкость может подаваться под своим рабочим давлением, что обеспечивается соответствующим регулятором расхода 43-46 и регулированием оборотами вала ТНА за счет управления работой соответствующего газогенератора (бензовоздушного газогенератора) 30 и 31.
Для увеличения и обеспечения необходимой дальности полета отдельной лафетной струи в каждую из магистралей подвода гасящей жидкости в лафетные стволы, до регуляторов расхода 43 - 46 вводятся с помощью дозаторов 39 - 42 ингибиторные добавки, которые поступают в дозаторы из емкости 52 по трубопроводу 51. Поступающие из лафетных стволов струи гасящей жидкости формируют в очаге возгорания пятна орошения. Система видеодатчиков-дальномеров 54 позволяет оценить эффективность расположения этих пятен орошения для гашения очага возгорания. С учетом отклонений отдельных пятен орошения от оптимального позиционирования с помощью силовых приводов 12-15,лафетных стволов 8-11, салазок 5, и стоек 3, 4, силовых приводов 47-50 регуляторов расхода 43 - 48, настройкой дозаторов ингибиторов 39-42 пилот-оператор роботизированной пожарной установки или ее центральный процессор П производят корректировку положения пятен орошения в зоне очага возгорания, в том числе и с целью частичного наложения пятен орошения или зон орошения друг на друга. После этого производится тушение очага возгорания путем перемещения по нему пятен орошения, проворачивая стойки 3 и 4 и изменяя параметры каждой отдельной струи (дальность, площадь пятна орошения и позиционирование его относительно других пятен орошения). Тушение очага возгорания может производиться как пилотом-оператором, так и управляться автономно процессором П роботизированной пожарной установки, исходя из показаний системы видеодатчиков-дальномеров 54. Управление работой роботизированной пожарной установки пилотом-оператором как в процессе ее выдвижения на боевую позицию, так и непосредственно при тушении очага возгорания производится через приемопередающую антенну 55.
При полной ликвидации очага возгорания, что определяется по показаниям системы видеодатчиков-дальномеров 54, происходит выключение газогенераторов (бензовоздушных газогенераторов) 30 и 31, и электропевмоклапанами 22 - 25 перекрытие проходных сечений соответствующих патрубков 18 - 21. После выбега насосов 26 - 28 производится перекрытие проходных сечений магистралей подвода гасящей жидкости в лафетные стволы. Для этого силовыми приводами 47-50 производится перекрытие проходных сечений регуляторов расхода 43-46. В соответствии с требованиями регламента роботизированная пожарная установка и после гашения возгорания находится на боевой позиции для предотвращения возможного повторного возгорания. После устранения такой возможности роботизированная пожарная установка может быть выведена с боевой позиции и отправлена на пополнение запасов гасящей жидкости(воды) и ингибиторов.
Таким образом, предлагаемый способ гашения очагов возгорания объектов повышенной взрывоопасности позволяет более эффективно организовать доставку гасящей жидкости (воды) в очаг возгорания за счет более равномерной плотности орошения очага возгорания и увеличения площади пятна орошения. Для этого используется четное количество лафетных стволов, работающих на один очаг возгорания и имеющих насосные станции, каждая из которых используется для подачи воды в два лафетных стволы. Способ позволяет повысить безопасность тушения очага возгорания на объектах утилизации боеприпасов за счет большего удаления лафетных стволов, установленных на мобильную транспортную базу с большим запасом гасящей жидкости (воды), от очага возгорания, что достигается увеличением дальности полета струи за счет введения в жидкость ингибиторных добавок (поверхностно-активных веществ), влияющих на коэффициент поверхностного натяжения и коэффициент вязкости в струе жидкости. Использование в качестве транспортной базы многоосных автомобилей из состава мобильных грунтовых ракетных комплексов позволяет разместить на каждой отдельной такой транспортной базе емкости объемом до 100 кубических метров для гасящей жидкости (воды). Штатные пожарные машины имеют запасы гасящей жидкости в пределах 2,5-5 кубических метров [10]. Использование в качестве насосных станций для мобильной роботизированной пожарной машины турбонасосоных агрегатов (ТНА) от снимаемых с вооружения ракет с жидкостными ракетными двигателями еще более упрощает процедуру разработки предлагаемой роботизированной пожарной установки. В частности, в качестве высокоточных и мощных силовых приводов для пожарного оборудования на такой установке могут быть с успехом использованы так называемые рулевые машинки, используемые на ракетах для работы органов управления вектором тяги ракетного двигателя [9]. Тем самым, предлагаемый способ тушения пожаров и устройство для его реализации позволяет повысить оперативность организации процесса тушения очага возгорания, эффективность и безопасность пожаротушения
Источники информации
1. A.M. Гарпинченко. Пожарная тактика. Часть II. Тушение пожаров на объектах народного хозяйства /A.M. Гарпинченко, Н.М. Евтюшкин, И.Ф. Кимстач. Под редакцией И.Ф. Кимстача - М.: Издательство литературы по строительству, 1971. - 285 с.
2. ГОСТ 51115. Техника пожарная. Стволы пожарные лафетные комбинированные. Общие технические требования. Методы испытаний.
3. http://WWW.Cleper.ru/normative-documents/etc/primenenie-stacionarnyh-pozharnyh-lofetnyh-stvolov-ostcilliruishego-tipa/
4. Ильин В.В. Основы развития аварийных ситуаций при хранении рассредоточенных групп зарядов и пути минимизации их последствий: Монография / В.В. Ильин, А.П. Рыбаков - Пермь, ПВИ ВВ МВД России, 2007 - 148 с.
5. http:kzst45.ru/index.php/mobilnaya-robotirovannaya-ustanovka
6. Абросимов Ю.Г. Гидравлика и противопожарное водоснабжение. Учебник для слушателей и курсантов пожарно-технических образовательных учреждений МЧС России. / Ю.Г. Абросимов, А.И. Иванов, А.А. Качалов, Е.Е. Кирюханцев, Ю.А. Мышак, А.А. Пименов. Под редакцией Ю.Г. Абросимова - М.: Академия ГПС МЧС России, 2003. - 392 с.
7. Теребнев В.В. Пожарная тактика. Основы тушения пожаров / В.В. Теребнев, А.В. Подгрушный. Под общей ред. Верзилина М.М. - М.: 2009. - 504 с.
8. Мелькумов Т.М. Ракетные двигатели / Т.М. Мелькумов Т.М., Н.И. Мелик-Пашаев, П.Г. Чистяков, А.Г. Шиуков - М.: Машиностроение, 1976. - 399 с.
9. Кузнецов Н.П. Утилизация ракет с ЖРД (на примере ракеты 8К14) / Н.П. Кузнецов, М.Г. Кургузкин, В.А. Николаев - Москва-Ижевск: НИЦ «Регулярная и хаотическая динамика», 2004. - 288 с.
10. Кузнецов Н.П. Утилизация наземного оборудования мобильных грунтовых ракетных комплексов / Н.П. Кузнецов, М.Г. Кургузкин, И.Б. Ахмадуллин - Москва-Ижевск: НИЦ «Регулярная и хаотическая динамика», 2010. - 528 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТУШЕНИЯ ПОЖАРОВ НА ОБЪЕКТАХ ХРАНЕНИЯ БОЕПРИПАСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2622829C1 |
| Многофункциональный робототехнический комплекс предупредительного мониторинга, обнаружения возгораний и управления пожаротушением производственных объектов | 2021 |
|
RU2775482C1 |
| Способ тушения пожаров роботизированными установками пожаротушения | 2023 |
|
RU2808270C1 |
| САМОДВИЖУЩИЙСЯ КОМПЛЕКС ПОЖАРОТУШЕНИЯ НА БАЗЕ САМОХОДНОГО РОБОТА | 2020 |
|
RU2755461C1 |
| СПОСОБ ПОЖАРОТУШЕНИЯ В ПОМЕЩЕНИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2370292C2 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
| Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения | 2016 |
|
RU2637745C1 |
| Роботизированная установка пожаротушения модульного типа повторно-кратковременного действия | 2020 |
|
RU2751690C1 |
| УСТАНОВКА ПОЖАРОТУШЕНИЯ | 2008 |
|
RU2384355C1 |
| Способ тушения пожаров многофункциональным робототехническим комплексом при авариях в тоннелях | 2024 |
|
RU2834501C1 |
Изобретение относится к пожарной технике и может быть использовано для тушения пожаров на объектах утилизации боеприпасов, объектах хранения пожаро- и взрывоопасных материалов. Способ тушения пожаров заключается в формировании на очаге возгорания нескольких пятен орошения очага огнегасящей жидкостью, которые образованы за счет ее подачи в очаг возгорания лафетными стволами, причем для увеличения удаления лафетных стволов от очага возгорания в огнегасящую смесь добавляются поверхностно активные вещества - ингибиторы, повышающие коэффициент поверхностного натяжения жидкости и увеличивающие длину компактной части струи. При этом позиционирование каждого отдельного пятна орошения на очаге возгорания проводится с условием отсутствия взаимодействия отдельных лафетных струй друг с другом и максимальной эффективности перемещения пятен орошения в процессе гашения возгорания. Способ реализуется с помощью роботизированной мобильной установки пожаротушения, имеющей ходовую часть с силовым приводом, вдоль бортов которой установлены лафетные стволы с силовыми приводами позиционирования их продольных осей по углу возвышения над линией горизонта и по азимутальному углу, а подача гасящей жидкости в лафетные стволы производится с помощью турбонасосного агрегата, позволяющего подать одной насосной станцией гасящую жидкость в два лафетных ствола, причем перед подачей гасящей жидкости в лафетные стволы в нее добавляются ингибиторы, повышающие коэффициент поверхностного натяжения жидкости. Управление работой системами мобильной роботизированной пожарной установки осуществляется либо бортовым процессором, либо дистанционно оператором, для чего установка оснащена соответствующей телерадиоаппаратурой. 2 н.п. ф-лы, 5 ил.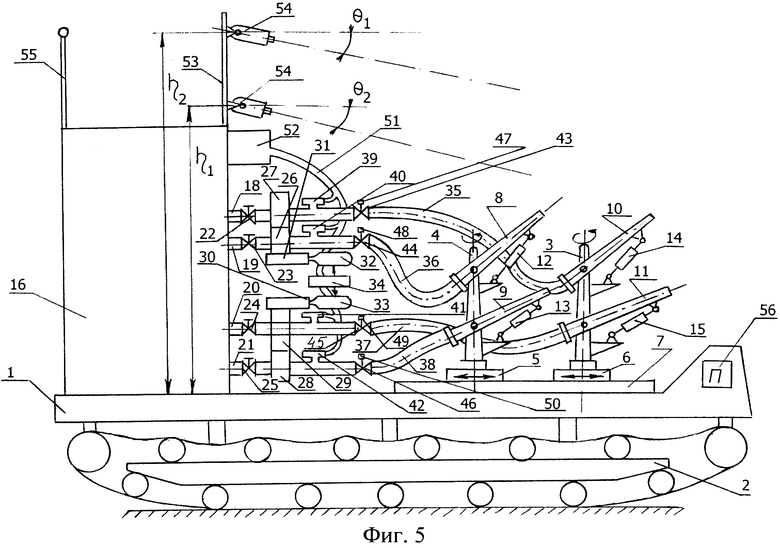
1. Способ тушения пожаров, состоящий в подаче к очагу возгорания огнегасящей жидкости с помощью мобильной роботизированной установки пожаротушения, отличающийся тем, что для повышения интенсивности орошения очага возгорания в нем формируются несколько пятен орошения огнегасящей жидкостью, каждое из которых создается своим лафетным стволом, установленным на установку пожаротушения, а для повышения безопасности при тушении пожаров на пожаро- и взрывоопасных объектах, когда необходима максимальная удаленность от очага возгорания, в огнегасящую жидкость добавляются ингибиторные добавки, позволяющие увеличить коэффициент поверхностного натяжения жидкости, а соответственно, как длину компактной части струи, так и максимальную дальность ее полета, причем в ходе процесса тушения пожара производится управление позиционированием каждого из пятен орошения непосредственно на площади очага возгорания для предотвращения взаимодействия струй огнегасящей жидкости друг с другом и реализации наиболее эффективной тактики организации тушения очага возгорания.
2. Устройство для тушения пожаров мобильной роботизированной установкой пожаротушения содержащей ходовую часть с силовым приводом, емкость с огнегасящей жидкостью (огнегасящим составом), узел подачи огнегасящей жидкости в очаг возгорания и систему управления передвижением установки по охраняемой территории как в автономном режиме, так и при управлении оператором, а также систему управления работой узла подачи огнегасящей жидкости в очаг возгорания, отличающееся тем, что устройство имеет четное количество узлов подачи огнегасящей жидкости в очаг возгорания, выполненных в виде пожарных лафетных стволов, установленных по бортам ходовой части, причем каждый лафетный ствол имеет свои силовые приводы для позиционирования его по углу азимута и углу возвышения относительно горизонта, а подача огнегасящей жидкости в лафетные стволы производится от насосных станций, выполненных в виде турбонасосных агрегатов, каждая из которых подает огнегасящую жидкость в два лафетных ствола, причем в огнегасящую жидкость перед ее поступлением в тот или иной лафетный ствол посредством специальных дозаторов из емкости с поверхностно активными веществами, установленной на ходовой части установки пожаротушения, добавляются ингибиторы, повышающие длину компактной части струи, а для управления положением пятна орошения каждой отдельной струи в очаге возгорания установка пожаротушения имеет систему видеодатчиков-дальномеров, причем управление положением каждого конкретного пятна орошения осуществляется как управлением с помощью силовых приводов положения каждого отдельного лафетного ствола, так и варьируя величиной давления огнегасящей жидкости, подаваемой в конкретный лафетный ствол, путем управления работой газогенераторов каждого из турбонасосных агрегатов, так и регулированием расхода огнегасящей жидкости в каждом из рукавов подачи огнегасящей жидкости в конкретный лафетный ствол, а работа газогенераторов турбонасосных агрегатов управляется с помощью блока управления, который регулирует подачу углеводородного топлива в камеру сгорания газогенераторов, являющихся бензовоздушными газогенераторами, а управление работой установки пожаротушения в автономном режиме осуществляется бортовым процессором или оператором посредством телеуправления, для чего установка пожаротушения оснащена соответствующей приемопередающей телерадиоаппаратурой.
| US 201202857 A1, 15.11.2012 | |||
| РОБОТИЗИРОВАННЫЙ ПОЖАРНЫЙ КОМПЛЕКС С СИСТЕМОЙ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 2010 |
|
RU2433847C1 |
| Ротационная машина для перфорирования бумаги | 1934 |
|
SU44256A1 |

