Изобретение относится к области измерительной техники, в частности к измерению параметров механических колебаний в широкой полосе частот, и может быть использовано для измерения волновых параметров механических колебаний различных объектов в строительстве, машиностроении, акустике и т.д.
Известно, что для измерения параметров механических колебаний в настоящее время существуют различные способы преобразования определяемого параметра в измеряемый сигнал различной физической природы (электрический, оптический и т.д.). Чаще других для измерения механических колебаний используются однокомпонентные (с одним чувствительным элементом) пьезоэлектрические датчики, измеряющие проекцию вектора колебательного ускорения на измерительную ось датчика. Для того чтобы измерить величину и направление вектора колебательного ускорения, используют 2 или 3 чувствительных элемента, объединенных в одном корпусе. Два чувствительных элемента позволяют определить направление вектора колебательного ускорения в плоскости, а три чувствительных элемента в трех ортогональных направлениях позволяют определить величину и направление вектора в пространстве.
Для ответственных измерений получили распространение «трехкомпонентные» вибропреобразователи, представляющие собой конструкцию из трех ортогонально ориентированных однокомпонентных (моноскопических или скалярных) датчиков в общем корпусе («3 в 1»). При таком инженерном решении чувствительные элементы датчиков, строго говоря, пространственно, физически и электрически разнесены и измеряемые ими компоненты вектора могут иметь существенные фазовые рассогласования относительно измеряемых параметров. Помимо вносимых фазовых рассогласований пьезокристаллы однокомпонентных датчиков имеют свою технологически обусловленную матрицу тензорного преобразования, придающую каждому датчику индивидуальные параметры поперечной чувствительности. Поэтому измерения трех однокомпонентных датчиков, размещенных в общем корпусе, нельзя отождествлять с проекциями вектора виброускорения, так как они вносят искажения в величину и направление вектора измеряемых колебаний. Для временного согласования (синхронизации) измеряемых компонентов вектора производители встраивают в трехканальные датчики интегральные схемы кондиционирования типа ICP/ISOTRON.
На информативность метрологической схемы трехкомпонентного датчика, состоящего из трех однокомпонентных датчиков, также влияет точность ортогонального расположения измерительных осей однокомпонентных датчиков в общем корпусе.
Волна измеряемого пространственного колебания в измерительной точке передается на датчик «3 в 1», измерительная ось Z которого перпендикулярна основанию корпуса, через преобразование «растяжение - сжатие», а на два других датчика, измерительные оси X и Y которых параллельны основанию корпуса, через преобразование «сдвига». Физика этих процессов существенно отличается не только линейными коэффициентами тензорной матрицы преобразования, что можно учесть подстройкой коэффициентов усиления, но и разницей резонансных частот нормальных (продольных) и касательных (поперечных) деформаций общего корпуса.
Продольные и поперечные резонансы связаны соотношением:
f(рез.попер.)=f(рез.y)=f(рез.x)=(1/3)f(peз.z)=(1/3)f(рез.прод.)
В метрологии принято, что линейный диапазон рабочих частот находится в пределах 0.7 относительно наименьшей резонансной частоты, в рассматриваемом случае, относительно f (рез. попер). Следовательно, диапазон рабочих частот такого датчика по осям X и Y будет составлять около 20% от диапазона рабочих частот по оси Z. Таким образом, резонансные свойства передаточной среды по ортогональным осям являются ограничительным обстоятельством при определении частотной области достоверных измерений векторных диагностических параметров.
Известен патент №2229136 RU на трехкомпонентный виброаксельрометр с одним чувствительным элементом. В этом устройстве одна измерительная компонента (Z) из трех ортогональных определяется путем физического преобразования «растяжения -сжатия», а две другие (X и Y) путем преобразования «сдвига» в чувствительном элементе. Вследствие существенного различия резонансных частот процессов «растяжения - сжатия» (f рез.z=25-28 кГц) и резонансных частот «сдвиговых» процессов (f рез.x,y=6-8 кГц), возможность их применения для достоверной реконструкции векторных диагностических параметров ограничена частотами 3-4 кГц.
Таким образом, датчики по патенту №2229136 RU вместо объявленного частотного диапазона 10 Гц-15 кГц фактически реализуют векторные свойства в пределах до 3 кГц (20% от заявленного диапазона). Преимуществом разработки по патенту №2229236 RU является синхронность электрического преобразования (измерения) компонентов в виде одновременного измерения во времени проекций вектора на измерительные оси чувствительного элемента датчика. Однако, вследствие того, что сдвиговая плоскость смещена относительно измерительной точки объекта на величину, соизмеримую с размером чувствительного элемента, с измерительной точкой совмещается только измерительная ось Z («растяжение - сжатие»), а «сдвиговые» оси - X и У физически и пространственно разнесены с измерительной точкой. Кроме этого, нетехнологичная система несимметрично позиционированного съема заряда приводит к низкой повторяемости характеристик датчика.
Наиболее близким аналогом предлагаемого способа точного измерения вектора механических колебаний является метод, описанный в патенте №2383025 RU. В этом патенте предложено устройство, которое содержит три чувствительных элемента в виде пьезоэлектрических или биморфных пластин, консольно жестко закрепленных на общем корпусе, который выполнен в форме трехгранной пирамиды с тремя ортогональными плоскостями. С помощью трех чувствительных элементов, расположенных близко к измерительной точке, вектор колебательного ускорения раскладывается на три ортогональные компоненты, измерение которых позволяет получить значение и направление измеряемого вектора.
Предлагаемое изобретение решает техническую задачу по созданию способа и 3D-приемника совмещенного приема и системного преобразования компонентов измеряемых механических колебаний во всем диапазоне диагностических параметров объекта, который реализует все основные требования к достоверности измерения компонентов вектора.
Техническое решение поставленной задачи заключается в том, что электрические сигналы снимаются с чувствительных элементов 3D-приемника механических колебаний, расположенных на плоскостях корпуса, образующих трехгранную равностороннюю пирамиду с равнонаклоненными к основанию корпуса гранями. В центре каждой грани в определенной точке ее оси симметрии размещается вибропакетник, являющийся узлом приема, преобразования и съема спектра измеряемых колебаний. Измерительные оси каждого из трех вибропакетников перпендикулярны плоскости своей грани и пересекаются в центре основания пирамиды, совпадающем с измерительной точкой приемника. Происходит физически и электрически связанное синхронное преобразование пространственных колебаний в направлении трех пространственно связанных измерительных осей. Особенностью метода является использование в метрологической схеме вибропакетников однотипного физико-механического преобразования «растяжения-сжатия», что при симметрично-круговом расположении измерительных осей относительно точки крепления 3D-приемника позволяет выполнить системные требования векторно-фазовых измерений.
Каждый вибропакетник реализует 1D-линейное прецизионное вибропреобразование с коэффициентами тензорной матрицы при низкой поперечной чувствительности приемных элементов. Предварительная селекция чувствительных элементов вибропакетников позволяет обеспечить высокую повторяемость технических характеристик в целом и улучшить технологичность производства. Автономное изготовление вибропекетников в виде функциональных узлов не требует последующей наладки, существенно упрощая процедуру общей сборки 3D-приемника. Три «измеряемые пирамидой» связанные пространством и временем проекции вектора можно аффинно преобразовать в три проекции вектора в декартовой системе координат объекта мониторинга.
Техническим результатом осуществления изобретения является создание способа и 3D-приемника приема и синхронного тензорного преобразования компонентов измеряемых механических колебаний во всем диапазоне диагностических параметров объекта. Способ реализует все основные требования к достоверности измерения компонентов вектора колебаний:
а) измеряемые компоненты связаны пространственно вследствие конструктивно симметрично-кругового пересечения измерительных осей вибропакетников в общей точке основания изотропного корпуса приемника;
б) измеряемые компоненты связаны физически вследствие совпадения общей точки пересечения осей вибропакетников с измерительной точкой крепления приемника на контурной поверхности объекта мониторинга;
в) измеряемые компоненты связаны электрически вследствие симметричного равноудаления вибропакетников от точки измерения и синхронно преобразующих фронты колебаний в заряды для последующего построения диагностических параметров в векторной форме;
г) измерения компонентов являются согласованными по резонансным характеристикам вследствие использования в метрологической схеме вибропакетников однотипного физико-механического преобразования «растяжения - сжатия»;
д) 3D-приемник и его метрологическая схема являются технологичными вследствие возможности обеспечения высокой повторяемости технических характеристик вибропакетников.
Из сравнения аналога и предлагаемого способа следует, что общими существенными признаками являются:
прием и преобразование проекций вектора измеряемых колебаний с помощью трех однотипных приемников механических колебаний, расположенных на ортогональных плоскостях, образующих трехгранную равностороннюю пирамиду с равнонаклоненными к основанию гранями,
а отличительные существенные признаки заключаются в том, что предлагаемый способ приема и преобразования компонентов вектора механических колебаний осуществляется с помощью трех однотипных приемников механических колебаний, расположенных на плоскостях, образующих трехгранную равностороннюю пирамиду с равнонаклоненными к основанию пирамиды под заданными углами φ гранями, а съемные приемные узлы (вибропакетники) располагаются в центре каждой грани в определенной точке ее оси симметрии, при этом измерительные оси вибропакетников пересекаются в общей измерительной точке в центре основания 3D-приемника, что позволяет совместить пространственно, физически и электрически информацию о компонентах вектора и позволяет достоверно измерять вектор механических колебаний в измерительной точке.
Предлагаемое изобретение обладает новизной, так как заявители не нашли подтверждения применения такого же способа и устройства по такому же назначению.
Заявителям не известны технические решения, имеющие признаки, совпадающие с отличительными признаками заявляемого способа и устройства, поэтому мы считаем, что техническое решение соответствует критерию «изобретательский уровень».
Заявляемое изобретение может широко использоваться для измерения параметров механических колебаний различных объектов в строительстве, машиностроении, акустике и т.п., поэтому данное изобретение соответствует критерию «промышленная применимость».
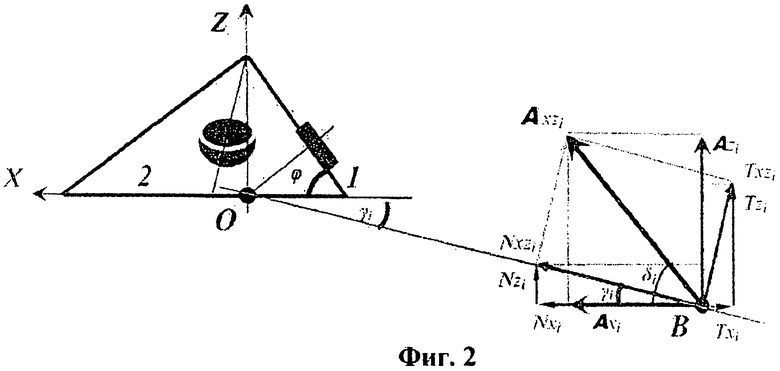
Изобретение иллюстрируется чертежами на фиг.1, 2, где схематично изображен 3D-приемник, реализующий способ точного синхронного определения 3-х компонентов вектора механических колебаний.
На фиг. 1 - Вид сверху на 3D-приемник, реализующий предлагаемый способ.

На фиг.2 - Вид сбоку на 3D-приемник, реализующий предлагаемый способ.

На всех фигурах общее обозначение: 1, 2, 3 - грани корпуса 3D-приемника
B - источник колебаний
O - измерительная точка приемника
A - колебательное воздействие
N - нормальные компоненты
T - касательные компоненты
α - пеленг источника в плоскости XY
γ - пеленг источника в плоскости XZ
β,δ - 3D-ориентация воздействия
i - приемные пьезопакетники i=1,2,3
φ - угол наклона грани к основанию
Способ 3D-приема и синхронного преобразования параметров механических колебаний осуществляется следующим образом:
Волны пространственных механических колебаний, исходящие от источников возмущений, воздействующих на объект, в соответствии с законами и принципами механики сплошной среды попадают в точку на контурной поверхности объекта мониторинга, в которой необходимо произвести измерение. При размещении 3D-приемника в указанной точке она называется измерительной и, в свою очередь, становится локальным источником динамической суперпозиции пространственных колебаний, передающим спектр колебаний на вибропакетники. За счет симметрично-кругового центрированного относительно основания изотропного корпуса и равноудаленного расположения вибропакетников относительно измерительной точки спектр волн колебаний одновременно (синхронно) доходит до чувствительных элементов всех трех вибропакетников. Чувствительные элементы осуществляют синхронное тензорное преобразование проекций векторов измеряемых колебаний, по которым не представляет труда реконструировать во времени спектр векторов по величине и направлению в пространстве. Способ приема реализует эффект «фокусирования» информации, передаваемой из измерительной точки на вибропакетники не только в пространственном и электрическом смысле, но и в физическом.
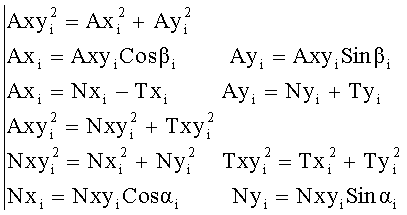
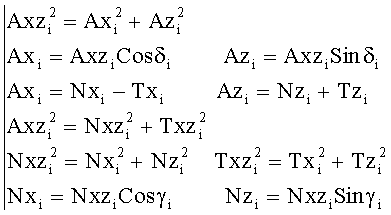
Матрица пересчета 1D-проекций вектора на ортогональные измерительные оси вибропакетников в ортогональную систему координат 3D-приемника
Измеряемые компоненты проекции воздействия А в системе координат 3D-приемника связаны нижеприведенными уравнениями


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕКОНСТРУКЦИИ ТРЕХМЕРНОГО ОБРАЗА ФИЗИЧЕСКОГО СОСТОЯНИЯ ОБЪЕКТА МОНИТОРИНГА В ИЗМЕРИТЕЛЬНОЙ ТОЧКЕ | 2010 |
|
RU2542589C2 |
| Пьезоэлектрический преобразователь пространственной вибрации и способ контроля его работоспособности на работающем объекте | 2021 |
|
RU2764504C1 |
| СПОСОБ РЕКОНСТРУКЦИИ МНОГОПАРАМЕТРИЧЕСКИХ ОБРАЗОВ КОЛЕБАТЕЛЬНЫХ ПРОЦЕССОВ МЕХАНИЧЕСКИХ СИСТЕМ | 2010 |
|
RU2536834C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО ОБЪЕМНОГО ИЗМЕРЕНИЯ ВЕКТОРНОЙ ФУНКЦИИ МАГНИТНОЙ ИНДУКЦИИ НЕОДНОРОДНО РАСПРЕДЕЛЕННОГО В ПРОСТРАНСТВЕ И ПЕРИОДИЧЕСКИ ИЗМЕНЯЮЩЕГОСЯ ВО ВРЕМЕНИ МАГНИТНОГО ПОЛЯ | 2012 |
|
RU2490659C1 |
| Радиоголографический способ определения диаграммы направленности антенны | 1990 |
|
SU1800400A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК-ОТВЕТЧИК ПО ГОРИЗОНТАЛЬНОМУ И ВЕРТИКАЛЬНОМУ УГЛУ | 2011 |
|
RU2492498C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИСПЫТАНИЯХ НА УДАРНЫЕ И ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2013 |
|
RU2545489C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВИБРАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2658568C2 |
| СПОСОБ СЖАТИЯ И ХРАНЕНИЯ ТРЕХМЕРНЫХ ДАННЫХ (ВАРИАНТЫ) | 2020 |
|
RU2753591C1 |
Изобретение относится к области измерительной техники, в частности к измерению параметров механических колебаний в широкой полосе частот. Изобретение может быть использовано для измерения волновых параметров механических колебаний различных объектов в строительстве, машиностроении, акустике и т.д. Предлагаемый способ приема и преобразования вектора механических колебаний осуществляется с помощью 3D-приемника в виде трехгранной равносторонней пирамиды с гранями, равнонаклоненными к основанию пирамиды под заданными углами φ, а съемные приемные узлы (вибропакетники) располагаются в центре каждой грани в определенной точке ее оси симметрии, что дает возможность совместить пространственно, физически и электрически информацию о компонентах вектора в измерительной точке и позволяет достоверно измерять вектор механических колебаний. Технический результат - создание способа и 3D-приемника приема и синхронного тензорного преобразования компонентов измеряемых механических колебаний во всем диапазоне диагностических параметров объекта с высокой достоверностью. 2 н.п. ф-лы, 2 ил.
1. Способ достоверного определения вектора механических колебаний в широкой полосе частот, включающий процесс синхронного измерения трех компонентов вектора механических колебаний с помощью чувствительных элементов, расположенных на гранях корпуса 3D-приемника, образующих трехгранную пирамиду, отличающийся тем, что для повышения достоверности измерений механическое колебание из приемной точки через изотропный корпус 3D-приемника поступает синхронно на чувствительные элементы, расположенные на корпусе приемника симметрично и равноудаленно относительно измерительной точки объекта мониторинга, на которых происходит тензорное преобразование измеряемых колебаний через однотипные процессы преобразования «растяжения - сжатия» в направлении измерительных осей, пересекающихся в измерительной точке, в сигналы, пропорциональные трем компонентам вектора механических колебаний, разложенных в направлении измерительных осей, совмещенных в измерительной точке пространственно, физически и электрически, что позволяет достоверно измерять величину и реконструировать в пространстве направление вектора механических колебаний.
2. Устройство - 3D-приемник механических колебаний для измерения вектора колебаний в широком диапазоне частот, содержащее три чувствительных элемента, закрепленных на гранях изотропного корпуса приемника, равнонаклоненных к основанию корпуса и образующих трехгранную равностороннюю пирамиду с основанием, являющимся основанием корпуса приемника, отличающееся тем, что для повышения достоверности измерений и повышения технологичности производства приемника чувствительные элементы выполнены в виде съемных приемных узлов - вибропакетников, расположенных симметрично-круговым образом на одинаковом расстоянии от измерительной точки приемника, совпадающей с геометрическим центром основания корпуса приемника и являющейся общей точкой пересечения измерительных осей вибропакетников, а посадочные места вибропакетников расположены на оси симметрии каждой грани, при этом измерительные оси чувствительных элементов образуют зеркально-симметричную относительно граней приемника пирамиду с вершиной в измерительной точке приемника.
| ТРЕХКОМПОНЕНТНЫЙ ДАТЧИК МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2383025C1 |
| US 2003163282 A1, 28.08.2003 | |||
| ПУЛЬСАЦИОННОЕ ПЕРЕМЕШИВАЮЩЕЕ УСТРОЙСТВО КОЛЬЦЕВОГО АППАРАТА | 2010 |
|
RU2446494C2 |
| ФОТОКОЛОРИМЕТРИЧЕСКИЙ ГАЗОАНАЛИЗАТОР | 1993 |
|
RU2034275C1 |

