ИИ
Область техники.
Изобретение относится к области измерительной техники, в частности к измерению параметров механических колебаний в широкой полосе частот. Изобретение может быть использовано для измерения волновых параметров механических колебаний различных объектов в строительстве, машиностроении, акустике и т.п.
Уровень техники.
Известно, что для измерения параметров механических колебаний в настоящее время существуют различные способы преобразования определяемого параметра в измеряемый электрический сигнал. Чаще других для измерения механических колебаний используются однокомпонентные (с одним чувствительным элементом) пьезоэлектрические датчики, измеряющие проекцию вектора колебательного ускорения на измерительную ось датчика. Для того чтобы измерить величину и направление вектора колебательного ускорения, используют 2 или 3 чувствительных элемента, вектора чувствительности которых не являются коллинеарными, объединенных в одном корпусе. Два чувствительных элемента позволяют определить направление вектора колебательного ускорения в плоскости, а три чувствительных элемента в трех ортогональных направлениях позволяют определить величину и направление вектора в пространстве.
Для ответственных измерений получили распространение трехкомпонентные вибропреобразователи, представляющие собой конструкцию из трех ортогонально ориентированных однокомпонентных датчиков в общем корпусе. При таком инженерном решении чувствительные элементы датчиков, в пространстве, по физическим и электрическим свойствам характеризуются векторными параметрами чувствительности и измеряемые ими компоненты вектора могут иметь фазовые рассогласования относительно измеряемых параметров, которые, как правило, весьма малы и не сказываются на результатах измерений, за исключением очень высоких частот, когда длинна волны колебательного процесса становится соизмеримой с расстоянием между центральными точками инерционных масс. Помимо вносимых фазовых рассогласований пьезоэлектрические кристаллы однокомпонентных датчиков имеют свою матрицу тензорного преобразования, связанную как с технологическими и конструктивными причинами, так и со свойствами пьезоэлектрического материала, придающую каждому датчику параметры поперечной чувствительности.
Известны также решения, описанные ниже, с единой инерционной массой и с одним или несколькими пьезоэлектрическими элементами. Во всех случаях такие многокомпонентные акселерометры имеют по каждой из осей поперечную чувствительность, снижающую точность измерения по всем осям. Влияние поперечной чувствительности типично как для простых пьезоэлектрических акселерометров, так и для акселерометров с встроенной электроникой.
На точность измерения составляющих вибрации с применением трехкомпонентного датчика, состоящего из трех однокомпонентных датчиков и на трехкомпонентные датчики с общими инерционными элементами, также влияет точность изготовления датчиков в общем корпусе.
Известен патент на трехкомпонентный виброакселерометр с одним чувствительным элементом. В этом устройстве одна измерительная компонента (Z) из трех ортогональных, определяется путем физического преобразования «растяжения - сжатия», а две другие (X и Y) путем преобразования «сдвига» в чувствительном элементе [Патент №2229136 RU, G01P 15/09 приор. 29.11.2002, опубл. 20.05.2004 Трехкомпонентный пьезоэлектрический виброакселерометр с одним чувствительным элементом].
Недостатком этого решения является высокая поперечная чувствительность при измерениях, снижающая точность контроля вибрации.
Известен способ измерения вектора механических колебаний и реализующее его устройство, которое содержит три чувствительных элемента в виде пьезоэлектрических или биморфных пластин, жестко закрепленных на общем корпусе, который выполнен в форме трехгранной пирамиды с тремя ортогональными плоскостями. С помощью трех чувствительных элементов, расположенных близко к измерительной точке, вектор колебательного ускорения раскладывается на три компоненты, измерение которых позволяет получить значение и направление измеряемого вектора [Патент №2383025 RU, G01P 15/09, приор. 15.10.2008, опубл. 27.02. 2010, Трехкомпонентный датчик механических колебаний].
Недостатком этого решения является высокая поперечная чувствительность при измерениях, снижающая точность контроля вибрации.
Известен способ определения вектора механических колебаний в широкой полосе частот, включающий процесс синхронного измерения трех компонентов вектора механических колебаний с помощью чувствительных элементов, расположенных на гранях корпуса 3D-приемника, образующих трехгранную пирамиду, механическое колебание из приемной точки через изотропный корпус 3D-приемника поступает синхронно на чувствительные элементы, расположенные на корпусе приемника симметрично и равноудаленно относительно измерительной точки объекта мониторинга, на которых происходит преобразование измеряемых колебаний через однотипные процессы преобразования «растяжения - сжатия» в направлении измерительных осей, пересекающихся в измерительной точке, в сигналы, пропорциональные трем компонентам вектора механических колебаний, разложенных в направлении измерительных осей, совмещенных в измерительной точке пространственно, физически и электрически, что позволяет измерять величину и реконструировать в пространстве направление вектора механических колебаний [Патент RU 2530479, G01P 15/09, приор. 20.05.2010, опубл. 10.10.2014 Способ и 3d-приемник измерения вектора механических колебаний].
Недостатком этого решения является ограниченность функциональных возможностей и наличие поперечной чувствительности в каждом из каналов измерения.
Известен способ контроля вибрации многокомпонентным датчиком, выходные сигналы которого пропускают через согласующие усилители и полученный вектор сигналов умножают на матрицу корректирующих коэффициентов, элементы которой равны элементам матрицы обратной матрице коэффициентов чувствительности многокомпонентного датчика, получаемый вектор используют для вычисления ортогональных составляющих вибрации, а результаты измерения выводят на устройство отображения [Авторское свидетельство СССР №1257411, опубл. БИ №34, 1981 г., G01H 9/00, Анализатор вибраций].
Данный способ имеет ограниченные функциональные возможности. Этот способ и реализующее его устройство позволяют устранить влияние поперечной чувствительности многокомпонентного датчика и взаимные наводки в каналах измерения, но не обеспечивают возможность достоверного контроля состояния оборудования, на котором установлен датчик, так как получаемые сигналы образуют независимые (ортогональные) составляющие.
Известен способ контроля вибрации многокомпонентным датчиком, выходные сигналы которого пропускают через согласующие усилители и полученный вектор сигналов умножают на матрицу корректирующих коэффициентов, элементы которой равны элементам матрицы обратной матрице коэффициентов чувствительности многокомпонентного датчика, получаемый вектор используют для вычисления ортогональных составляющих вибрации, а результаты измерения выводят на устройство отображения [Авторское свидетельство СССР №1341499, опубл. БИ №36, 1987 г., G01H 9/00. Устройство для измерения пространственной вибрации].
Данный способ имеет ограниченные функциональные возможности. Этот способ и реализующее его устройство позволяют устранить влияние поперечной чувствительности многокомпонентного датчика и взаимные наводки в каналах измерения, но не обеспечивают возможность достоверного контроля состояния оборудования, на котором установлен датчик, так как получаемые сигналы образуют независимые (ортогональны) составляющие.
Известен способ контроля вибрации многокомпонентным датчиком, выходные сигналы которого пропускают через согласующие усилители и полученный вектор сигналов умножают на матрицу корректирующих коэффициентов, элементы которой равны элементам матрицы обратной матрице коэффициентов чувствительности многокомпонентного датчика, получаемый вектор используют для вычисления ортогональных составляющих вибрации, а результаты измерения выводят на устройство отображения [Патент РФ №2399890 опубл. БИ №6, 20.09.2010, Многоканальное устройство анализа пространственных векторных величин (варианты)]. Данный способ имеет ограниченные функциональные возможности. Этот способ и реализующее его устройство позволяют устранить влияние поперечной чувствительности многокомпонентного датчика и взаимные наводки в каналах измерения, но не обеспечивают возможность достоверного контроля состояния оборудования, на котором установлен датчик, так как получаемые сигналы образуют независимые (ортогональны) составляющие. Это техническое решение имеет ограниченные функциональные возможности.
Известно техническое решение [Патент США 6038924, НПК 73/514.34, МПК: G01P 15/09, приор. 22.12.1997, опубл. 21.03.2000 г.] в котором выходы трехкомпонентного датчика соединены с входами согласующих усилителей, выходы которых соединены с входами блока коррекции, который формирует из вектора входных сигналов вектор выходных сигналов, каждый из которых представляет собой сумму входных с соответствующими весовыми коэффициентами, причем блок коррекции может быть реализован как на аналоговых элементах, так и в виде цифрового вычислителя с аналого-цифровыми преобразователями на каждом из его входов (фиг. 3, 7 и 8).
Недостатком данного решения является ограниченность функциональных возможностей и относительно низкая достоверность функционирования при контроле уровня вибрации.
Известно техническое решение, касающееся контроля вибрации, выбранное в качестве прототипа, с многокомпонентным датчиком, выходные сигналы которого пропускают через согласующие усилители и полученный вектор сигналов умножают на матрицу корректирующих коэффициентов, элементы которой равны элементам матрицы обратной матрице коэффициентов чувствительности многокомпонентного датчика, получаемый вектор используют для вычисления ортогональных составляющих вибрации, а результаты измерения выводят на устройство отображения [Авторское свидетельство СССР №1330475, БИ №30, 1986 г., G01H 11/06. Устройство для измерения трехмерной вибрации]. Данный способ имеет ограниченные функциональные возможности. Этот способ и реализующее его устройство позволяют устранить влияние поперечной чувствительности многокомпонентного датчика и взаимные наводки в каналах измерения, но не обеспечивают возможность контроля состояния оборудования, на котором установлен датчик, с высокой достоверностью, так как получаемые сигналы образуют независимые (ортогональны) составляющие.
Единство изобретательского замысла.
Предлагаемые решения объединены общим замыслом, состоящим в том, что кроме получения ортогональных составляющих, независимых и ортогональных между собой, используемых для точной оценки вибрации, например, для решения задач диагностики вибрационного состояния, для всех сигналов датчика образующих вектор в неортогональном базисе из-за наличия поперечной чувствительности, умножением на матрицу дополнительных корректирующих коэффициентов, также получают идентичные n сигналов, где n - число компонент контролируемых датчиком, которые используют для контроля исправности каналов измерения и для резервированной противоаварийной защиты. Другими словами, наличие поперечной чувствительности у применяемого многокомпонентного датчика из недостатка, снижающего точность измерений и устраняемого, как и в прототипе, умножением на матрицу корректирующих коэффициентов, превращается в преимущество, обеспечивая возможность резервированного контроля и противоаварийной защиты.
Таким образом, целью предполагаемого изобретения является расширение функциональных возможностей и повышение достоверности функционирования.
Для вектора вибрации А мы получим вектор кода В в соответствии с выражением:

для плоскости, а для случая трехмерного пространства:
Для получения точных значений ортогональных составляющих вибрации с подавлением влияния поперечных чувствительностей, которые связанны как с конструктивными свойствами, так и со свойствами используемых пьезоэлектрических элементов, вектор В можно умножить на матрицу корректирующих коэффициентов С, что позволяет получить вектор V ортогональных составляющих вибрации, если матрица корректирующих коэффициентов является обратной к матрице коэффициентов чувствительности:

где Е - единичная матрица
для измерений с двухкомпонентным датчиком и
при измерениях с трехкомпонентным датчиком
Для реализации противоаварийной защиты с возможным контролем и дублированием вектор В аналоговых сигналов или цифровых данных умножаем на матрицу коэффициентов K удовлетворяющих условию:
для случая двухкомпонентного датчика и измерения в плоскости, или
 и
и
для случая измерения в трехмерном пространстве.
Данные условия являются матричными уравнениями и для них нетрудно получить единственное решение.
Матрицы в правых частях уравнений (6) или (7) и (8) получают из соответствующих единичных циклической перестановкой их столбцов.
Если при реализации условия (3) в качестве выходных сигналов формируется вектор сигналов:
 или
или  ,
,
то при реализации условий (6) или (7) и (8) формируются вектора:
 или
или  и
и
Сравнение компонент векторов V1 и V2, или V1, V2 и V3 позволяет сформировать резервированную оценку составляющих и таким образом повысить достоверность формирования сигнала защиты по превышению допустимого уровня вибрации.
Если полученные по всем каналам составляющие отличаются больше, чем на величину допустимой погрешности можно фиксировать наличие неисправного канала измерений. При трехканальном исполнении соответствующем использованию трехкомпонентного датчика наличие трех идентичных каналов позволяет реализовать мажоритарное голосование в виде функции «два из трех», т.е. обеспечить резервирование и противоаварийную защиту, даже если один из каналов формирует недостоверные данные.
Отметим, что расширение функциональных возможностей и резервирование не требуют при использовании предлагаемого способа увеличения количества датчиков, входных согласующих усилителей и т.д.
Сущность изобретения.
Поставленная цель достигается тем, что в способе контроля вибрации многокомпонентным датчиком, выходные сигналы которого пропускают через согласующие усилители и получают на их выходах вектор сигналов, который умножают на матрицу корректирующих коэффициентов, элементы которой равны элементам матрицы, обратной матрице коэффициентов чувствительности многокомпонентного датчика, получаемый вектор используют для измерения ортогональных составляющих вибрации в виде оценок уровня, а результаты измерения выводят на блок регистрации, полученный на выходе согласующих усилителей вектор сигналов дополнительно умножают на матрицу дополнительных корректирующих элементов, элементы которой выбраны таким образом, что произведение матрицы дополнительных корректирующих элементов на матрицу коэффициентов чувствительности многокомпонентного датчика образует матрицу, полученную из единичной матрицы, циклической перестановкой ее столбцов, и полученный дополнительный вектор сигналов, все элементы которого соответствуют мгновенным значением ортогональных составляющих, преобразуют в дополнительные оценки уровня, которые, как и ранее полученные оценки уровня, сравнивают с заданным порогом противоаварийной защиты, а сигналы результатов сравнения используют как сигнал защиты.
Отличие устройства контроля вибрации состоит в том, что в этом устройстве для контроля вибрации, содержащем многокомпонентный датчик, выходы которого соединены с входами соответствующих согласующих усилителей, выходы которых соединены с входами блока коррекции, выходы которого соединены с входами блока измерения параметров вибрации, выход которого соединен с входом блока регистрации, выходы блока коррекции соединены с входами блока противоаварийной защиты, дополнительные выходы дублирующих ортогональных составляющих вектора вибрации блока коррекции соединены с дополнительными входами блока противоаварийной защиты, выход которого является выходом сигнала защиты.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве блок коррекции содержит усилители с программируемым усилением, вход каждого из которых является входом блока коррекции, а выход соединен с входом соответствующего фильтра нижних частот, выходы которых соединены с входами соответствующих аналого-цифровых преобразователей, выходы которых соединены с входами вычислительного узла, выходы которого являются выходами блока коррекции, дополнительные выходы дублирующих ортогональных составляющих вектора вибрации которого являются дополнительными выходами вычислительного узла.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, блок коррекции содержит n усилителей с дифференциальным выходом, вход каждого из которых является входом блока коррекции, а выходы усилителей с дифференциальным выходом подключены к неподвижным контактам соответствующих n3 потенциометров, где n число компонент многокомпонентного датчика, а также содержит n2 сумматоров, каждый из которых содержит по n входов, которые соединены с подвижным контактом соответствующего потенциометра, которые соединены с разными усилителями с дифференциальными выходами, выходы n первых сумматоров являются выходами блока коррекции, дополнительные выходы дублирующих ортогональных составляющих вектора вибрации которого являются выходами остальных сумматоров.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, блок противоаварийной защиты содержит узел измерения уровня, входы которого являются входами блока противоаварийной защиты, а выход узла измерения уровня соединен с входом узла логики защиты, выход которого является выходом блока противоаварийной защиты.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, блок измерения параметров вибрации содержит узлы вычисления среднего квадратичного значения, входы которых являются входами блока измерения параметров вибрации, выходы узлов вычисления среднего квадратичного значения соединены через сглаживающие элементы с входами интерфейсного узла, выход которого является выходом блока измерения параметров вибрации.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, блок измерения параметров вибрации содержит узлы вычисления пикового значения, входы которых являются входами блока измерения параметров вибрации, выходы узлов вычисления пикового значения соединены через элементы хранения уровня с входами интерфейсного узла, выход которого является выходом блока измерения параметров вибрации.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, блок измерения параметров вибрации содержит узлы вычисления значения размаха, входы которых являются входами блока измерения параметров вибрации, выходы узлов вычисления значения размаха соединены через элементы хранения уровня с входами интерфейсного узла, выход которого является выходом блока измерения параметров вибрации.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, узел измерения уровня содержит элементы вычисления среднего квадратичного значения, входы которых являются узла измерения уровня, выходы элементов вычисления среднего квадратичного значения соединены через сглаживающие элементы с выходами узла измерения уровня.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, узел измерения уровня содержит элементы вычисления пикового значения, входы которых являются входами узла измерения уровня, выходы элементов вычисления пикового значения соединены через элементы хранения уровня с выходами узла измерения уровня.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, узел измерения уровня содержит элементы вычисления размаха, входы которых являются входами узла измерения уровня, выходы элементов вычисления размаха соединены через элементы хранения уровня с выходами узла измерения уровня.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, узел логики защиты содержит элемент сравнения сигналов, входы которого являются входами узла логики защиты, выход которого является выходом элемента сравнения сигналов, входы которого соединены с элементами индикации.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, элемент сравнения сигналов выполнен в виде логического мажоритарного элемента.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, элемент сравнения сигналов выполнен в виде элемента И.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, элемент сравнения сигналов выполнен в виде элемента ИЛИ.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, узел логики защиты содержит элемент сравнения сигналов, входы которого являются входами узла логики защиты, выход которого является выходом элемента сравнения сигналов, первый и второй входы которого соединены с первыми входами первого и второго элементов «ИСКЛЮЧАЮЩЕЕ ИЛИ», вторые входы которых соединены с третьим входом элемента сравнения сигналов, а выходы элементов «ИСКЛЮЧАЮЩЕЕ ИЛИ» соединены с элементами индикации.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, элемент сравнения сигналов выполнен в виде логического мажоритарного элемента.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, элемент сравнения сигналов выполнен в виде элемента И.
Другое отличие устройства контроля вибрации состоит в том, что в этом устройстве, элемент сравнения сигналов выполнен в виде элемента ИЛИ.
Краткое описание чертежей
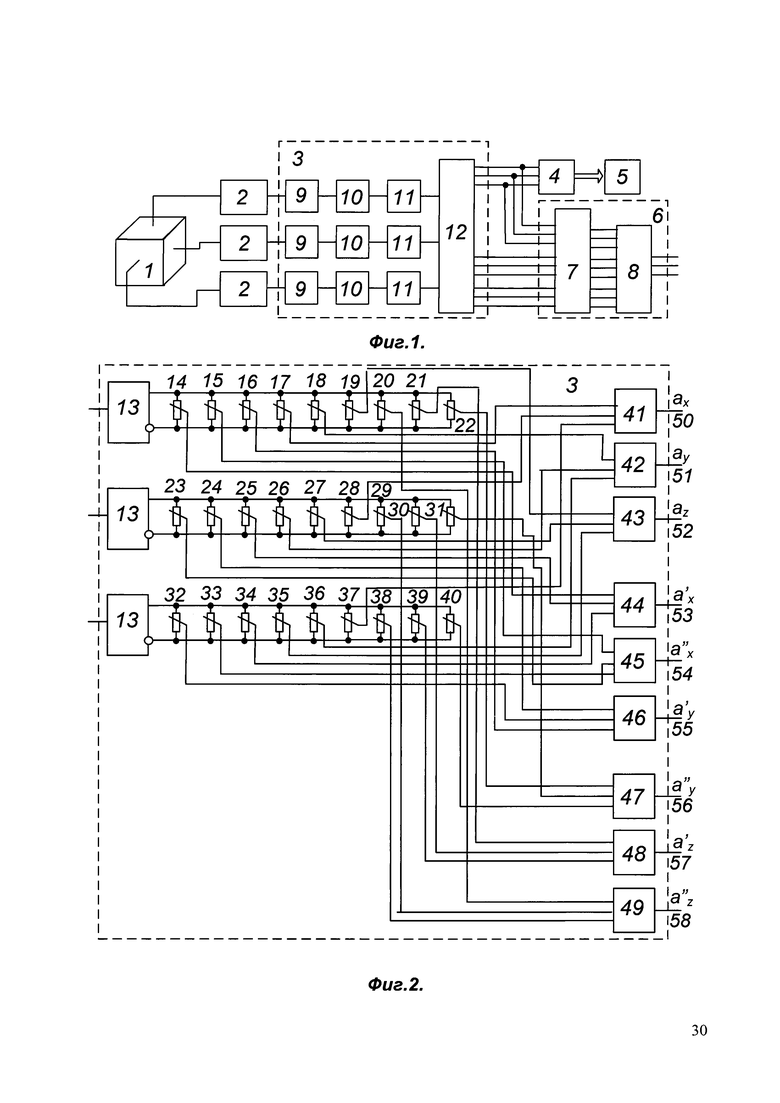
На фиг. 1 показан пример структурной схемы первого варианта выполнения устройства контроля вибрации.
На фиг. 2 показан пример структурной схемы блока коррекции для аналогового выполнения операции умножения вектора входных сигналов на матрицу корректирующих коэффициентов и на матрицу дополнительных корректирующих элементов.
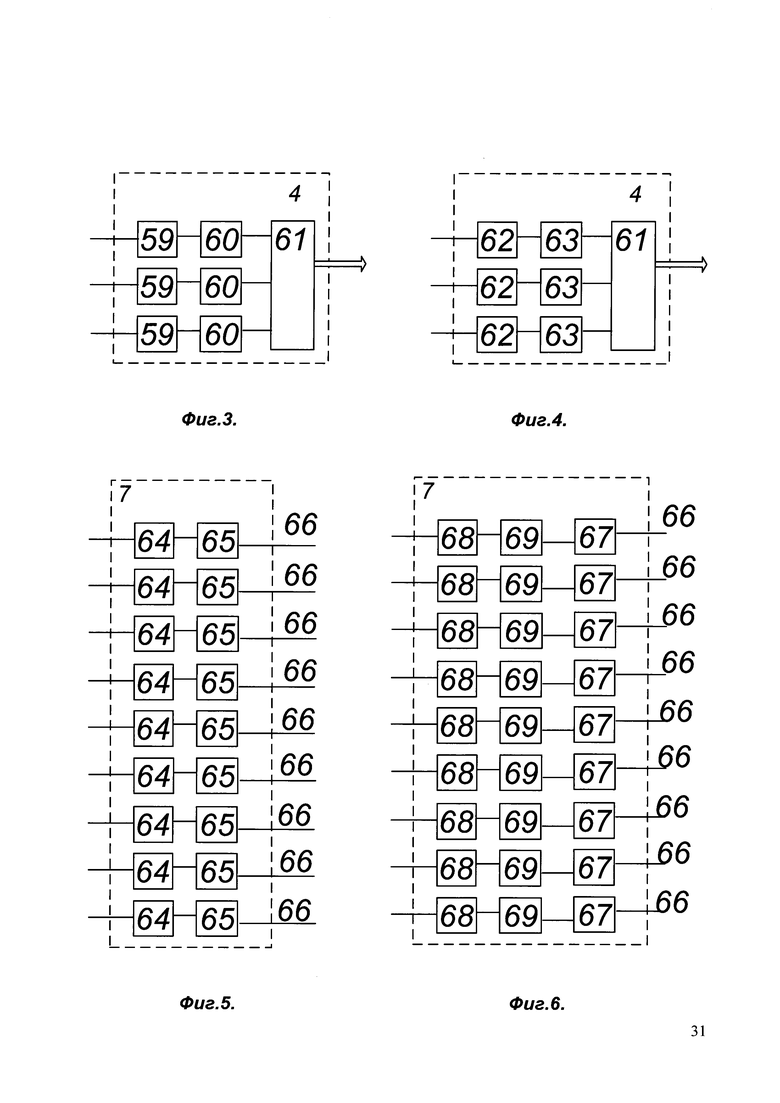
На фиг. 3 и 4 приведены примеры структурных схем блоков измерения параметров вибрации.
На фиг. 5 и 6 приведены примеры структурных схем узлов измерения уровня вибрации.
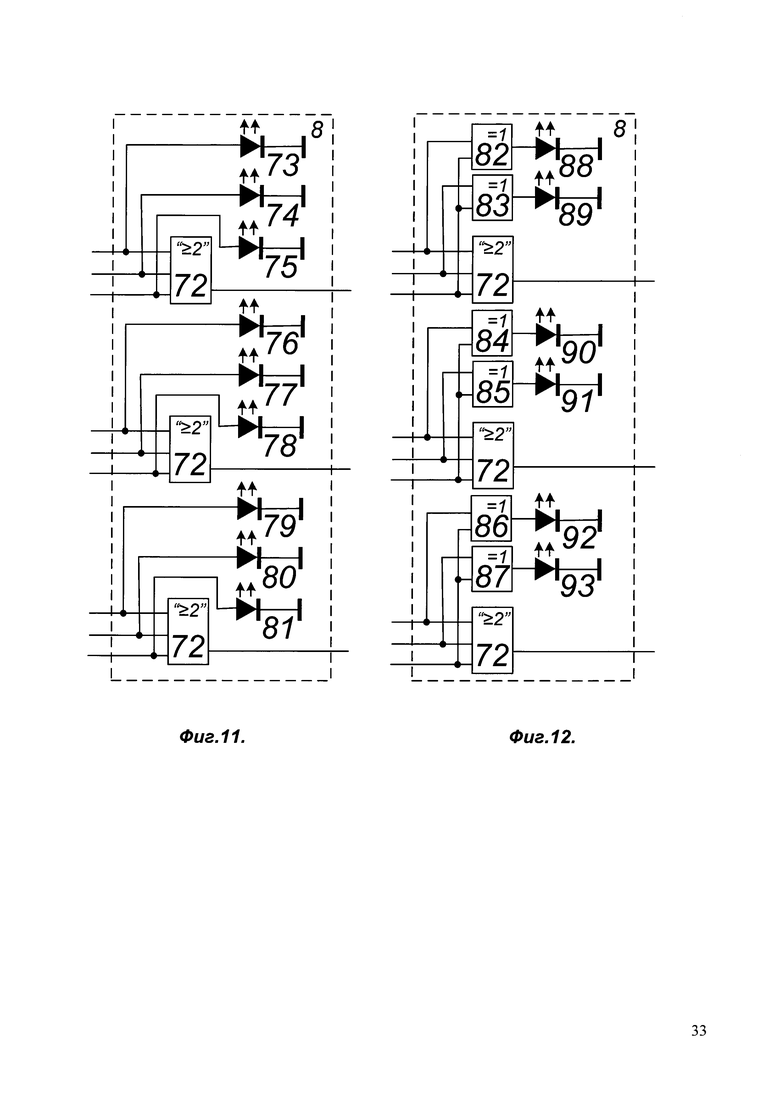
На рис. 7-12 приведены примеры структурных схем узлов логики защиты.
Подробное описание.
Способ контроля вибрации многокомпонентным датчиком 1, выходные сигналы которого пропускают через согласующие усилители 2 и получают на их выходах вектор сигналов В соответствующий выражениям (1) или (2), который умножают в блоке коррекции 3 на матрицу корректирующих коэффициентов С, элементы которой равны элементам матрицы S-1 (обратной матрице коэффициентов чувствительности S многокомпонентного датчика 1), получаемый вектор сигналов V используют для измерения ортогональных составляющих вибрации ах, ау и az, а результаты измерения блоком измерения 4 параметров этих составляющих выводят на блок регистрации 5. Полученный на выходе согласующих усилителей 2 вектор сигналов В в блоке коррекции 3 дополнительно умножают на матрицу К дополнительных корректирующих элементов, удовлетворяющую условиям (6) или (7) и (8), т.е. элементы которой выбраны таким образом, что произведение матрицы К дополнительных корректирующих элементов на матрицу S коэффициентов чувствительности многокомпонентного датчика 1 образует матрицу, элементы которой получены циклической перестановкой столбцов единичной матрицы, и полученный дополнительный вектор W сигналов, все элементы которого w1, w2 и w3 идентичны (равны с точностью в пределах погрешности измерения) мгновенным значениям комбинаций ортогональных составляющих ах, ау и az, преобразуют в оценки уровня вибрации в соответствии с выражениями для среднего квадратичного значения (СКЗ), пикового значения или размаха:
 для СКЗ;
для СКЗ;
 для пикового значения;
для пикового значения;
 для размаха.
для размаха.
Полученные по (14), (15) и/или (16) результаты сравнивают с заданным порогом противоаварийной защиты, а сигнал результата сравнения используют как сигнал защиты. Если вектор W представлен цифровыми сигналами, то сравнение выполняется программными средствами с цифровым пороговым значением, если вектор W образован аналоговыми сигналами, сравнение с пороговым значением может быть выполнено компаратором или логическим элементом, порог срабатывания которого равен аварийному (или предупредительному) порогу.
В устройстве для контроля вибрации, содержащем многокомпонентный датчик 1 выходы которого соединены с входами соответствующих согласующих усилителей 2, выходы которых соединены с входами блока коррекции 3, выходы которого соединены с входами блока 4 измерения параметров вибрации, выход которого соединен с входом блока 5 регистрации, выходы и дополнительные выходы дублирующих ортогональных составляющих вектора вибрации блока коррекции 3 соединены с входами блока 6 противоаварийной защиты, выход которого является выходом сигнала защиты.
Блок противоаварийной защиты 6 содержит узел измерения уровня 7, входы которого являются входами блока 6 противоаварийной защиты, а выход узла 7 измерения уровня соединен с входом узла 8 логики защиты, выход которого является выходом блока 6 противоаварийной защиты.
Узел измерения уровня 7 обеспечивает оценку уровня в соответствии с соотношениями (14)-(16).
При цифровой реализации операции умножения вектора сигналов на матрицу корректирующих коэффициентов, блок коррекции 3 содержит усилители 9 с программируемым усилением, вход каждого из которых является входом блока 3 коррекции, а выход соединен с входом соответствующего фильтра 10 нижних частот, выходы которых соединены с входами соответствующих аналого-цифровых преобразователей 11, выходы которых соединены с входами вычислительного узла 12, выходы которого являются выходами блока 3 коррекции, дополнительные выходы дублирующих ортогональных составляющих вектора вибрации которого являются дополнительными выходами вычислительного узла 12.
Вычислительный узел 12 может быть выполнен в виде DSP процессора, микроконтроллера, программируемой логической интегральной схемы - ПЛИС (FPGA), контроллера или одноплатного компьютера.
При аналоговой реализации блок 3 коррекции (фиг. 2) содержит усилители 13 с дифференциальным выходом, вход каждого из которых является входом блока 3 коррекции, а выходы усилителей 13 с дифференциальным выходом подключены к неподвижным контактам соответствующих n3 потенциометров 14-40, где n число компонент многокомпонентного датчика, а также содержит n2 сумматоров 41-49, каждый из которых содержит по n входов, которые соединены с подвижным контактом соответствующего потенциометра 14-40, которые соединены с разными усилителями 13 с дифференциальными выходами, выходы n первых сумматоров 41-43 являются выходами 50-52 блока 3 коррекции, дополнительные выходы дублирующих ортогональных составляющих вектора вибрации 53-58 которого являются выходами остальных сумматоров 44-49.
В зависимости от решаемой задачи измерения блок 4 может иметь различные варианты выполнения. Как показано на фиг. 3, блок 4 измерения параметров вибрации содержит узлы 59 вычисления среднего квадратичного значения, входы которых являются входами блока 4 измерения параметров вибрации, выходы узлов 59 вычисления среднего квадратичного значения соединены через сглаживающие элементы 60 с входами интерфейсного узла 61, выход которого является выходом блока 4 измерения параметров вибрации.
Сглаживающие элементы 60 могут быть выполнены в виде интегрирующих звеньев различного типа (интеграторов, RC цепей, фильтров нижних частот и т.п.).
В качестве узлов 59 могут использоваться и другие узлы оценки усредненных характеристик вибрации - асимметрии, эксцесса и т.п.
Кроме усредненных значений в качестве параметров также часто используют оценки экстремальных значений (амплитудное или пиковое, размах) В этом случае, как показано на фиг. 4, блок 4 измерения параметров вибрации содержит узлы 62 вычисления пикового значения, входы которых являются входами блока 4 измерения параметров вибрации, выходы узлов 62 вычисления пикового значения соединены через элементы 63 хранения уровня с входами интерфейсного узла 61, выход которого является выходом блока 4 измерения параметров вибрации.
Интерфейсный узел 61 обеспечивает согласование сигналов для блока регистрации и может быть выполнен в зависимости от формы представления и характеристик сигналов на стандартных решениях в виде интерфейсных элементов, преобразователей уровня, аналого-цифровых или цифро-аналоговых преобразователей.
Если оценивается значение максимума узел 62 формирует оценку пикового значения. Если проводится оценка размаха, в качестве узла 62 используют узел определения размаха.
В этом случае блок 4 измерения параметров вибрации содержит узлы вычисления значения размаха, входы которых являются входами блока 4 измерения параметров вибрации, выходы узлов вычисления значения размаха соединены через элементы хранения уровня с входами интерфейсного узла, выход которого является выходом блока 4 измерения параметров вибрации.
Как показано на фиг. 5 узел 7 измерения уровня содержит элементы 64 вычисления среднего квадратичного значения, входы которых являются входами узла 7 измерения уровня, выходы элементов 64 вычисления среднего квадратичного значения соединены через сглаживающие элементы 65 с выходами 66 узла 7 измерения уровня.
Если в качестве параметра уровня используют оценку экстремального уровня вибрации, например, пиковое значение, то, как показано на фиг. 6, узел 7 измерения уровня содержит согласующие элементы 67, узел 7 измерения уровня также содержит элементы 68 вычисления пикового значения, входы которых являются входами узла 7 измерения уровня, выходы элементов 68 вычисления пикового значения соединены через элементы 69 хранения уровня и через согласующие элементы 67 с выходами 66 узла 7 измерения уровня.
Если в качестве контролируемого параметра используют величину размаха, узел 7 измерения уровня содержит элементы вычисления размаха, входы которых являются входами узла 7 измерения уровня, выходы элементов вычисления размаха соединены через элементы хранения уровня с и согласующие элементы с выходами узла 7 измерения уровня.
Как показано на фиг. 7-10, узел 8 логики защиты содержит элементы 70 сравнения сигналов, например логические элементы ИЛИ 70, входы которых являются входами узла 8 логики защиты, выход которого является выходами элементов 70 сравнения сигналов.
В качестве элементов сравнения могут быть использованы элементы ИЛИ 70 (фиг. 7), И 71 (фиг. 8) или мажоритарные элементы «2 из 3» 72, как показано на фиг. 9 и 10.
Как показано на фиг. 11, при использовании в качестве элемента сравнения мажоритарных элементов «2 из 3» 72, входы этого элемента могут быть соединены которого соединены с элементами индикации 73-81.
Узел 8 логики защиты, показанный на фиг. 12, содержит элементы 72 сравнения сигналов, входы которых являются входами узла 8 логики защиты, выходы которого являются выходами элементов 72 сравнения сигналов, первый и второй входы которого соединены с первыми входами первых и вторых элементов «ИСКЛЮЧАЮЩЕЕ ИЛИ» 82-87, вторые входы которых соединены с третьими входами элементов 72 сравнения сигналов, а выходы элементов «ИСКЛЮЧАЮЩЕЕ ИЛИ» соединены с элементами индикации 88-93.
Способ реализуется следующим образом.
Многокомпонентный датчик 1 создает сигналы, которые формируются согласующими усилителями, на выходе которых вектор сигналов соответствует неортогональному базису из-за наличия поперечной чувствительности. Совокупность коэффициентов чувствительности характеризуется матрицей S коэффициентов чувствительности многокомпонентного датчика. Преобразование этого вектора сигналов в вектор соответствующий ортогональному базису выполняется блоком коррекции. Для этого вектор сигналов умножают на матрицу корректирующих коэффициентов, элементы которой равны матрице обратной матрице коэффициентов чувствительности. Получаемые ортогональные составляющие вектора вибрации с повышенной точностью характеризуют вибрационный процесс и для них измеряют параметры вибрации, необходимые для анализа вибрационного состояния контролируемого объекта. Для решения задачи противоаварийной защиты, которая как правило должна срабатывать при достаточно высоких для контролируемого оборудования уровнях вибрации по оценкам среднего уровня или уровня экстремального значения (пиковое значение или размах) важно обеспечить повышенную надежность, для чего рекомендуется реализовать резервирование (дублирование) измерений, а в некоторых случаях и реализовать средства самодиагностики. В предлагаемом решении получаемый от многокомпонентного датчика на выходе согласующих усилителей вектор сигналов умножают на матрицу дополнительных корректирующих коэффициентов, что позволяет получить на дополнительных выходах дублирующих ортогональных составляющих вектора вибрации идентичные сигналы соответствующие всем ортогональным составляющим. Требуемые дополнительные корректирующие коэффициенты, как было показано выше, получаются из значений матрицы коэффициентов чувствительности многокомпонентного датчика (которые легко можно определить замером сигналов на его выходах при последовательной установке датчика на калибровочный стенд в трех положениях, когда измерительные оси датчика соответствуют оси вибрации стенда). Элементы матрицы дополнительных корректирующих коэффициентов соответствуют решению матричного уравнения.
Получаемые идентичные для всех каналов оценки уровня поступают на узел логики защиты, который сравнивает их и формирует выходной сигнал противоаварийной защиты на своем выходе в соответствии с логикой мажоритарного голосования, или в соответствии с логическими функциями И или ИЛИ.
Устройство работает следующим образом.
Вибрационное воздействие на многокомпонентный датчик 1 приводит к появлению на его выходах сигналов, зависящих от всех составляющие вибрационного процесса. Эти сигналы формируются согласующими усилителями 2 и образую вектор сигналов датчика 1. Блок коррекции 3 обеспечивает умножение этого вектора сигналов на матрицы корректирующих коэффициентов С и дополнительных корректирующих коэффициентов К. При цифровой реализации блока коррекции, показанной на фиг. 1. вектор сигналов преобразуется в цифровую форму, для чего сигналы пропускают через последовательно соединенные усилители 9 с программируемым усилением, фильтры нижних частот 10 и аналого-цифровые преобразователи 11. Усилители 9 позволяют оптимизировать уровень сигналов для наиболее эффективного использования разрядности аналого-цифровых преобразователей 11. Фильтры нижних частот 10 служат для исключения влияния высокочастотных составляющих, частота которых превышает половину частоты выборок аналого-цифровых преобразователей. Вычислительный узел 12 обеспечивает умножение вектора сигналов в цифровой форме на матрицы корректирующих коэффициентов и вывод полученных результатов на основные выходы и дополнительные выходы дублирующих ортогональных составляющих вектора вибрации. С основных выходов полученный вектор сигналов соответствующий разложению вектора вибрации, воздействующего на многокомпонентный датчик 1 по ортогональному базису, поступает на блок 4 измерения параметров вибрации, который и выполняет оценку требуемых параметров для каждой составляющей, а результаты выводятся на блок регистрации 5.
Идентичные результаты формирования вектора сигналов на дополнительных выходах дублирующих ортогональных составляющих вектора вибрации поступают с дополнительных выходов вычислительного узла 12 на входы блока 6 противоаварийной защиты, который сравнивает их и формирует при необходимости на своем выходе сигналы о необходимости защитного отключения.
Если блок коррекции 3 реализует операцию умножения вектора сигналов на матрицы корректирующих коэффициентов и дополнительных корректирующих коэффициентов в аналоговой форме, его структурная схема, например, может быть выполнена, как показано на фиг. 2. Усилители 13 с дифференциальными выходами формируют на своих выходах противофазные сигналы, поступающие на потенциометры 14-40. Каждый потенциометр позволяет задать один из коэффициентов матрицы С корректирующих коэффициентов или матрицы дополнительных корректирующих коэффициентов К. Сумматоры 41-49 формируют на своих выходах векторы сигналов оценки вибрации с разложением по ортогональному базису и дополнительных сигналов, идентичны между собой и соответствующих дублирующих ортогональных составляющих вектора вибрации при разложении исходной вибрации по ортогональному базису.
Показанные на фиг. 3 и 4 примеры структурных схем блока измерения параметров обеспечивают оценку среднего квадратичного значения узлом 59 или пикового (размаха) узлом 62. Усреднение или хранение экстремального значения выполняется соответственно узлами 60 или 63. Полученные результаты передаются через интерфейсный узел 61 на блок регистрации 5.
Узлы оценки уровня вибрации 7 имеют похожие структурные схемы, показанные на фиг. 5 и 6. В них входные сигналы поступают на элементы оценки среднего квадратичного 64 или пикового (размаха) 68 текущих значений составляющих, а полученные результаты поступают соответственно на элементы сглаживания 65 или на элементы хранения 69.
Полученные на выходе узла 7 сигналы, характеризующие уровень вибрации поступают на узел логики защиты 8. Узел логики защиты, сравнивает уровни сигналов с заложенными в нем порогами срабатывания и при превышении их формирует на своем выходе сигналы противоаварийной защиты.
В простейшем случае порог срабатывания определяется порогом срабатывания соответствующего входа используемого в данном узле логического элемента, реализующего соответствующую логику защиты.
Приведенные на фиг. 7 и 8 схемы отличаются видом используемого логического элемента.
При использовании элемента ИЛИ 70 обеспечивается срабатывание противоаварийной защиты, если хотя бы один из сигналов на дополнительных выходах дублирующих ортогональных составляющих вектора вибрации блока коррекции 3 превысит допустимый уровень.
Применение логического элемента И 71 позволяет получит срабатывание блока противоаварийной защиты только если все три сигнала на основных и дополнительных выходах дублирующих ортогональных составляющих вектора вибрации блока коррекции 3 одновременно превышают заданный пороговый уровень.
Для узла, показанного на фиг. 9, логический сигнал присутствия аварийной ситуации формируется при совпадении двух сигналов аварийного уровня на его входах за счет применения мажоритарного логического элемента 72. Входные сигналы (фиг. 11) одновременно поступают на элементы индикации 73-81, сравнивая состояние которых между собой можно обнаружить состояние когда один из каналов неисправен, т.е. обеспечить контроль исправности. Следует отметить, что даже при наличии такой единичной неисправности на выходе блока логики защиты формируется правильная оценка наличия аварийной ситуации. Работа узла логики защиты, показанного на фиг. 12 аналогична предыдущему варианту, но на выходах элементов «ИСКЛЮЧАЮЩЕЕ ИЛИ» 82-87 обеспечивается формирование на элементах индикации 88-93 двоичных кодов номера неисправного канала, что может быть в некоторых случаях более предпочтительным.
Поскольку современные цифровые вычислительные узлы имеют достаточно высокое быстродействие не только для выполнения операций умножения вектора на матрицы, для сигналов с частотами, типичных для процессов вибрации в реальном масштабе времени, но и позволяют одновременно выполнять измерение параметров сигналов и их уровня, а также выполнять сравнение уровня с заданными пороговыми значениями, соответствующие функции могут быть реализованы единым вычислительным узлом, как это выполнено во втором варианте реализации устройства.
Технический эффект от реализации предлагаемого решения состоит в том, что без существенных дополнительных аппаратурных затрат обеспечивается не только контроль с высокой точностью ортогональных составляющих вибрационного процесса, но и обеспечивается оценка с резервированием (дублированием) уровня вибрации для противоаварийной защиты. При этом не требуется применения многокомпонентных датчиков сложной конструкции и высокой стоимости с низкой поперечной чувствительностью. Это повышает надежность, расширяет функциональные возможности и увеличивает достоверность функционирования предлагаемого решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ВИБРАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2658577C2 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО АНАЛИЗА ПРОСТРАНСТВЕННЫХ ВЕКТОРНЫХ ВЕЛИЧИН (ВАРИАНТЫ) | 2009 |
|
RU2399890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ВОЗМОЖНОСТЬЮ КАЛИБРОВКИ В ПОЛЕВЫХ УСЛОВИЯХ | 2016 |
|
RU2620326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| Анализатор вибраций | 1980 |
|
SU1257411A1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛОСТНОСТИ ВЫСОКОТОЧНЫХ НАВИГАЦИОННЫХ ОПРЕДЕЛЕНИЙ ПОТРЕБИТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2577846C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |

Изобретение относится к метрологии. Способ контроля вибрации многокомпонентным датчиком содержит этапы, на которых выходные сигналы сенсора пропускают через согласующие усилители и получают на их выходах вектор сигналов, который умножают на матрицу корректирующих коэффициентов, элементы которой равны элементам матрицы, обратной матрице коэффициентов чувствительности многокомпонентного датчика, получаемый вектор используют для измерения ортогональных составляющих вибрации в виде оценок уровня, а результаты измерения выводят на блок регистрации. Полученный на выходе согласующих усилителей вектор сигналов дополнительно умножают на матрицу дополнительных корректирующих элементов, элементы которой выбраны таким образом, что произведение матрицы дополнительных корректирующих элементов на матрицу коэффициентов чувствительности многокомпонентного датчика образует матрицу, полученную из единичной матрицы, циклической перестановкой ее столбцов, и полученный дополнительный вектор сигналов преобразуют в дополнительные оценки уровня, которые, как и ранее полученные оценки уровня, сравнивают с заданным порогом противоаварийной защиты. Технический результат - расширение функциональных возможностей, повышение надежности и достоверности функционирования. 2 н. и 17 з.п. ф-лы, 12 ил.
1. Способ контроля вибрации многокомпонентным датчиком, выходные сигналы которого пропускают через согласующие усилители и получают на их выходах вектор сигналов, который умножают на матрицу корректирующих коэффициентов, элементы которой равны элементам матрицы, обратной матрице коэффициентов чувствительности многокомпонентного датчика, получаемый вектор используют для измерения ортогональных составляющих вибрации в виде оценок уровня, а результаты измерения выводят на блок регистрации, отличающийся тем, что полученный на выходе согласующих усилителей вектор сигналов дополнительно умножают на матрицу дополнительных корректирующих элементов, элементы которой выбраны таким образом, что произведение матрицы дополнительных корректирующих элементов на матрицу коэффициентов чувствительности многокомпонентного датчика образует матрицу, полученную из единичной матрицы, циклической перестановкой ее столбцов, и полученный дополнительный вектор сигналов, все элементы которого соответствуют мгновенным значением ортогональных составляющих, преобразуют в дополнительные оценки уровня, которые, как и ранее полученные оценки уровня, сравнивают с заданным порогом противоаварийной защиты, а сигналы результатов сравнения используют как сигнал защиты.
2. Устройство для контроля вибрации, содержащее многокомпонентный датчик, выходы которого соединены с входами соответствующих согласующих усилителей, выходы которых соединены с входами блока коррекции, выходы которого соединены с входами блока измерения параметров вибрации, выход которого соединен с входом блока регистрации, отличающееся тем, что выходы блока коррекции соединены с входами блока противоаварийной защиты, дополнительные выходы дублирующих ортогональных составляющих вектора вибрации блока коррекции соединены с дополнительными входами блока противоаварийной защиты, выход которого является выходом сигнала защиты.
3. Устройство для контроля вибрации по п. 2, отличающееся тем, что блок коррекции содержит усилители с программируемым усилением, вход каждого из которых является входом блока коррекции, а выход соединен с входом соответствующего фильтра нижних частот, выходы которых соединены с входами соответствующих аналого-цифровых преобразователей, выходы которых соединены с входами вычислительного узла, выходы которого являются выходами блока коррекции, дополнительные выходы дублирующих ортогональных составляющих вектора вибрации которого являются дополнительными выходами вычислительного узла.
4. Устройство для контроля вибрации по п. 2, отличающееся тем, что блок коррекции содержит n усилителей с дифференциальным выходом, вход каждого из которых является входом блока коррекции, а выходы усилителей с дифференциальным выходом подключены к неподвижным контактам соответствующих n3 потенциометров, где n - число компонент многокомпонентного датчика, а также содержит n2 сумматоров, каждый из которых содержит по n входов, которые соединены с подвижным контактом соответствующего потенциометра, которые соединены с разными усилителями с дифференциальными выходами, выходы n первых сумматоров являются выходами блока коррекции, дополнительные выходы дублирующих ортогональных составляющих вектора вибрации которого являются выходами остальных сумматоров.
5. Устройство для контроля вибрации по п. 2, отличающееся тем, что блок противоаварийной защиты содержит узел измерения уровня, входы которого являются входами блока противоаварийной защиты, а выход узла измерения уровня соединен с входом узла логики защиты, выход которого является выходом блока противоаварийной защиты.
6. Устройство для контроля вибрации по п. 2, отличающееся тем, что блок измерения параметров вибрации содержит узлы вычисления среднего квадратичного значения, входы которых являются входами блока измерения параметров вибрации, выходы узлов вычисления среднего квадратичного значения соединены через сглаживающие элементы с входами интерфейсного узла, выход которого является выходом блока измерения параметров вибрации.
7. Устройство для контроля вибрации по п. 2, отличающееся тем, что блок измерения параметров вибрации содержит узлы вычисления пикового значения, входы которых являются входами блока измерения параметров вибрации, выходы узлов вычисления пикового значения соединены через элементы хранения уровня с входами интерфейсного узла, выход которого является выходом блока измерения параметров вибрации.
8. Устройство для контроля вибрации по п. 2, отличающееся тем, что блок измерения параметров вибрации содержит узлы вычисления значения размаха, входы которых являются входами блока измерения параметров вибрации, выходы узлов вычисления значения размаха соединены через элементы хранения уровня с входами интерфейсного узла, выход которого является выходом блока измерения параметров вибрации.
9. Устройство для контроля вибрации по п. 5, отличающееся тем, что узел измерения уровня содержит элементы вычисления среднего квадратичного значения, входы которых являются узла измерения уровня, выходы элементов вычисления среднего квадратичного значения соединены через сглаживающие элементы с выходами узла измерения уровня.
10. Устройство для контроля вибрации по п. 5, отличающееся тем, что узел измерения уровня содержит элементы вычисления пикового значения, входы которых являются входами узла измерения уровня, выходы элементов вычисления пикового значения соединены через элементы хранения уровня с выходами узла измерения уровня.
11. Устройство для контроля вибрации по п. 5, отличающееся тем, что узел измерения уровня содержит элементы вычисления размаха, входы которых являются входами узла измерения уровня, выходы элементов вычисления размаха соединены через элементы хранения уровня с выходами узла измерения уровня.
12. Устройство для контроля вибрации по п. 5, отличающееся тем, что узел логики защиты содержит элемент сравнения сигналов, входы которого являются входами узла логики защиты, выход которого является выходом элемента сравнения сигналов, входы которого соединены с элементами индикации.
13. Устройство для контроля вибрации по п. 12, отличающееся тем, что элемент сравнения сигналов выполнен в виде логического мажоритарного элемента.
14. Устройство для контроля вибрации по п. 12, отличающееся тем, что элемент сравнения сигналов выполнен в виде элемента И.
15. Устройство для контроля вибрации по п. 12, отличающееся тем, что элемент сравнения сигналов выполнен в виде элемента ИЛИ.
16. Устройство для контроля вибрации по п. 5, отличающееся тем, что узел логики защиты содержит элемент сравнения сигналов, входы которого являются входами узла логики защиты, выход которого является выходом элемента сравнения сигналов, первый и второй входы которого соединены с первыми входами первого и второго элементов «ИСКЛЮЧАЮЩЕЕ ИЛИ», вторые входы которых соединены с третьим входом элемента сравнения сигналов, а выходы элементов «ИСКЛЮЧАЮЩЕЕ ИЛИ» соединены с элементами индикации.
17. Устройство для контроля вибрации по п. 16, отличающееся тем, что элемент сравнения сигналов выполнен в виде логического мажоритарного элемента.
18. Устройство для контроля вибрации по п. 16, отличающееся тем, что элемент сравнения сигналов выполнен в виде элемента И.
19. Устройство для контроля вибрации по п. 16, отличающееся тем, что элемент сравнения сигналов выполнен в виде элемента ИЛИ.
| Устройство для измерения трехмерной вибрации | 1986 |
|
SU1330475A1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННОГО КОНТРОЛЯ (ВАРИАНТЫ) | 2008 |
|
RU2376564C1 |
| US 2011178611 A1, 21.07.2011 | |||
| US 2014324367 A1, 30.10.2014 | |||
| US 4023044 A, 10.05.1977 | |||
| US 5365787 A, 22.11.1994 | |||
| US 6507790 B1, 14.01.2003 | |||
| Механизм для получения дифференциального ряда чисел оборотов шпинделя металлорежущих станков | 1947 |
|
SU70553A1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО АНАЛИЗА ПРОСТРАНСТВЕННЫХ ВЕКТОРНЫХ ВЕЛИЧИН (ВАРИАНТЫ) | 2009 |
|
RU2399890C1 |
| Правоторова Е.А | |||
| КОМПЕНСАЦИЯ ДЕГРАДАЦИИ ПАРАМЕТРОВ МНОГОКОМПОНЕНТНОГО ДАТЧИКА ВИБРАЦИИ МЕТОДОМ СРАВНЕНИЯ СТАТИСТИЧЕСКИХ ХАРАКТЕРИСТИК СИГНАЛОВ | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| М.: Спектр, 2015 (стр | |||
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |

