Настоящее изобретение относится к системе управления перемещением зерна для перемещения потока зерна из рабочей машины в принимающий контейнер, а более конкретно к системе, включающей в себя моделирование в реальном времени профиля уровня заполнения для зон принимающего контейнера на основании известных или предполагаемых скоростей потока зерна и положений выпускного сопла системы выгрузки относительно зон принимающего контейнера в виде функции времени, при этом система управления перемещением зерна автоматически регулирует относительные положения выпускного сопла и принимающего контейнера для оказания воздействия на равномерное в целом заполнение принимающего контейнера.
Уборочные работы в большом поле, как правило, включают выгрузку зерна из уборочной машины, такой как комбайн, в принимающий контейнер, такой как трактор, тянущий зерновой прицеп, бункер и тому подобное. Релевантная информация, которая должна учитываться во время процесса выгрузки, включает, но без ограничения, тип сельскохозяйственной культуры; погодные условия; топографические условия; относительные положения принимающего контейнера, комбайна и выпускного сопла системы выгрузки; уровень зерна в контейнере, из которого перемещается зерно, например, из зернового резервуара комбайна; и состояние заполнения зернового прицепа/принимающего контейнера и т.д. Во время процесса выгрузки оператор комбайна и оператор трактора работают вместе с целью заполнения принимающего контейнера до максимальной емкости, минимизируя в то же время потерю зерна. В некоторых случаях, принимающий контейнер является неподвижным, и оператор комбайна в процессе уборки поля несколько раз приближается к принимающему контейнеру и позиционирует комбайн и выпускное сопло относительно принимающего контейнера для выгрузки зерна в принимающий контейнер и достижения, равномерного в целом заполнения без рассыпания.
Для мониторинга процесса выгрузки, оператор комбайна и оператор трактора, если принимающий контейнер является подвижным, должны отслеживать и регулировать поток зерна посредством регулировки относительного положения и угла выпускного сопла и принимающего контейнера для достижения равномерного заполнения принимающего контейнера и предотвращения рассыпания зерна. Данная ситуация является проблемной по причине того, что оба оператора, как правило, должны смотреть назад в сторону выгрузной трубы, ведя в то же время автотранспортное средство вперед в процессе осуществления выгрузки. Оператор комбайна не может непрерывно следить за полем и условиями работы машины, что приводит к риску отклонения от требуемой траектории движения или валка, столкновения с неожиданными препятствиями впереди комбайна и/или пропускания сигналов тревоги или сигналов предупреждения, выводимых на монитор внутри комбайна. Оператор трактора должен также заботиться о поддержании безопасной дистанции от жатки комбайна для предотвращения повреждения обеих машин. В дополнение, положение ни одного из операторов не позволяет легко смотреть внутрь принимающего контейнера, поэтому, как правило, невозможен визуальный мониторинг уровня заполнения контейнера.
Достижение равномерного заполнения неподвижного принимающего контейнера является проблемным по причине увеличивающегося размера принимающих контейнеров, который может обычно составлять несколько емкостей зернового резервуара комбайна. В результате, оператор комбайна приближается к частично заполненному принимающему контейнеру без возможности видеть уровень заполнения различных зон внутри принимающего контейнера. Достижение равномерного уровня заполнения становится еще более трудным для осуществления, если комбайн и трактор, тянущий принимающий контейнер, находятся в движении, и трудность дополнительно повышается, если рельеф является неровным и/или наклонным и/или имеется сильный, порывистый и/или изменяющий направление ветер. Повышенная рабочая нагрузка на оператора, имеющаяся при любых из данных условий, которая отвлекает внимание от поля зрения впереди и дисплеев внутри комбайна и/или трактора, и невозможность зрительно контролировать уровень заполнения принимающего контейнера, делает трудным заполнение емкости принимающего контейнера без рассыпания.
Таким образом, предпринимается попытка найти систему управления перемещением зерна, которая предоставляет одну или более возможностей и преодолевает один или более недостатков и ограничений, изложенных выше.
Раскрыта система управления перемещением зерна, которая предоставляет одну или более возможностей и преодолевает один или более недостатков и ограничений, изложенных выше.
Согласно предпочтительному варианту осуществления представленного изобретения, предоставлена система перемещения зерна для автоматического управления перемещением зерна из зернового резервуара уборочной машины в принимающий контейнер в то время, когда рабочая машина и принимающий контейнер расположены в общем в относительных положениях бок о бок. Рабочая машина, такая как комбайн, содержит систему выгрузки, выполненную с возможностью направления потока зерна из зернового резервуара в принимающий контейнер через выпускное сопло с известной скоростью потока хорошо известным образом.
Система перемещения зерна представленного изобретения предоставляет сенсорную систему, включающую в себя считывающее устройство, установленное около сопла или на нем, и с первого информационного устройства, расположенного в первой зоне принимающего контейнера или в предварительно определенном отношении к ней, по n-ное информационное устройство, расположенное в n-ной зоне принимающего контейнера или в предварительно определенном отношении к ней, соответственно. Первое информационное устройство содержит по меньшей мере информацию, свидетельствующую о местоположении первой зоны принимающего контейнера, а n-ное информационное устройство содержит по меньшей мере информацию, свидетельствующую о местоположении n-ной зоны принимающего контейнера, соответственно. Считывающее устройство выполнено с возможностью получения информации от первого информационного устройства по n-ное информационное устройство. Сенсорная система выполнена с возможностью определения, на основании данной информации, положений сопла относительно первой зоны по n-ную зону в виде функции времени.
Система дополнительно предоставляет систему моделирования, включающую в себя процессор, выполненный с возможностью взаимодействия с сенсорной системой и моделирования профиля уровня заполнения в реальном времени по меньшей мере для одной зоны принимающего контейнера. Уровень заполнения моделируется в качестве функции положений сопла в виде функции времени и известных скоростей потока зерна.
Смоделированный профиль уровня заполнения может быть предоставлен в дисплейную систему, выполненную с возможностью отображения информации, свидетельствующей о профиле уровня заполнения в реальном времени по меньшей мере для оператора рабочей машины. Если комбайн находится в состоянии выгрузки, смоделированный профиль уровня заполнения может быть предоставлен оператору транспортного средства, транспортирующего принимающий контейнер.
Контроллер взаимодействует с системой моделирования и выполнен с возможностью автоматического предоставления контрольной индикации для регулирования положения сопла относительно первой зоны по n-ную зону для направления потока зерна в каждую из n зон, соответственно, для достижения равномерного в целом заполнения принимающего контейнера.
Согласно предпочтительному аспекту изобретения, считывающее устройство содержит радиочастотный приемопередатчик, а информационные устройства с первого по n-ное содержат радиочастотные приемоответчики. Приемопередатчик выполнен с возможностью запрашивания приемоответчиков с первого по n-ный и получения сохраненной информации от первого приемоответчика по n-ный приемоответчик, соответственно. Приемоответчики выполнены с возможностью мобильной выдачи хранящейся в них информации при запрашивании приемопередатчиком.
Согласно еще одному аспекту представленного изобретения, первое информационное устройство по n-ное информационное устройство дополнительно содержит информацию, свидетельствующую по меньшей мере об одном из: общей емкости принимающего контейнера; дате и времени уборки; местоположениях и условиях полей; и информации, характерной для зерна.
Признак изобретения включает возможность моделирования профиля уровня заполнения по меньшей мере для одной зоны принимающего контейнера в реальном времени, на основании положений сопла в виде функции времени и известной (включая определяемой, предполагаемой, полученной и т.д.) скорости потока зерна на протяжении времени, пока сопло доставляет зерно по меньшей мере в одну зону. Во время процесса выгрузки, смоделированный профиль уровня заполнения непрерывно обновляется.
В одном предпочтительном варианте осуществления изобретения, контроллер выполнен с возможностью автоматического управления по меньшей мере одной рабочей машиной, принимающим транспортным средством и/или выгрузной трубой/выпускным соплом для регулирования относительного положения рабочей машины и принимающего транспортного средства и/или положения сопла относительно первой зоны по n-ную зону принимающего контейнера.
В еще одном предпочтительном варианте осуществления, контроллер выполнен с возможностью автоматического предоставления контрольной индикации оператору рабочей машины и/или оператору принимающего транспортного средства, обеспечивая возможность регулирования относительного положения рабочей машины и принимающего контейнера и/или положения сопла относительно n зон принимающего контейнера.
Согласно еще одному аспекту изобретения, контроллер выполнен с возможностью автоматического предоставления контрольной индикации оператору рабочей машины, при этом оператор рабочей машины предоставляет управляющие сигналы рабочей машине, принимающему транспортному средству и выгрузной трубе/выпускному соплу.
Еще одним признаком изобретения является возможность автоматической остановки потока зерна, когда положение сопла вызывало бы доставку потока зерна за пределы принимающего контейнера или в зону, имеющую смоделированный профиль уровня заполнения, свидетельствующий о том, что зона является полной.
Преимущества данного изобретения станут очевидны при рассмотрении следующего подробного раскрытия изобретения, особенно сделанного в сочетании с сопровождающими чертежами, на которых:
Фиг.1 представляет собой вид сверху типичной рабочей машины, такой как комбайн, имеющей сопло выгрузной трубы, расположенное над одной из множества зон принимающего контейнера, для операции выгрузки согласно системе управления перемещением зерна представленного изобретения;
Фиг.2 представляет собой блок схему верхнего уровня различных составных элементов системы управления перемещением зерна представленного изобретения;
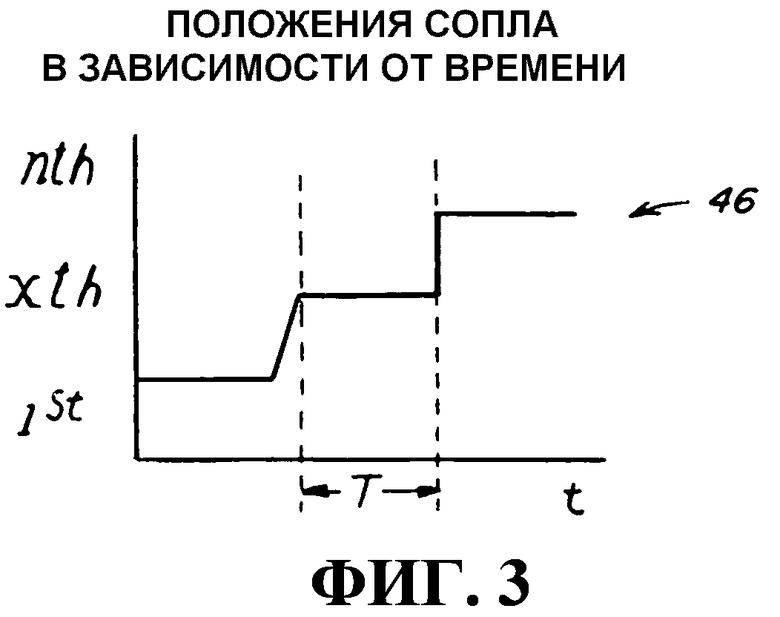
Фиг.3 представляет собой репрезентативный график положения сопла выгрузной трубы в виде функции времени;
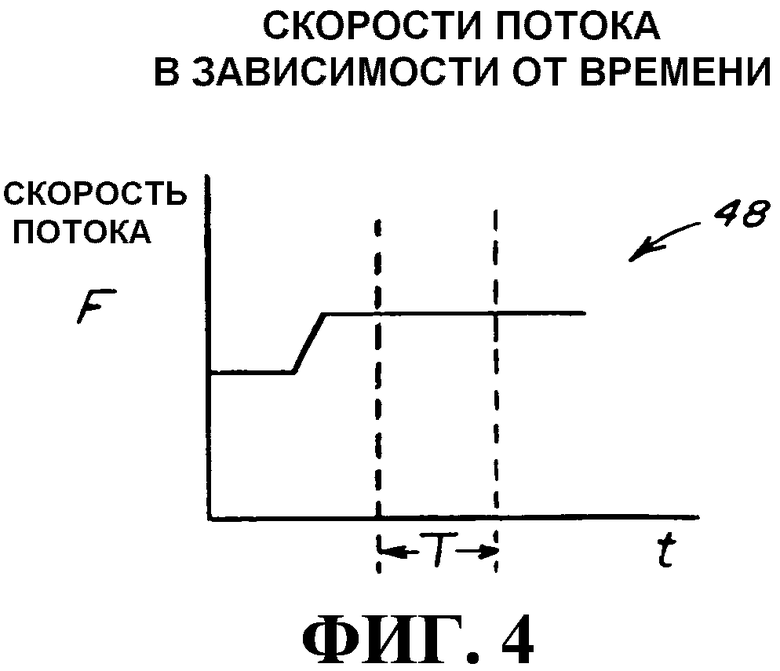
Фиг.4 представляет собой репрезентативный график известных или предполагаемых скоростей потока зерна из сопла выгрузной трубы;
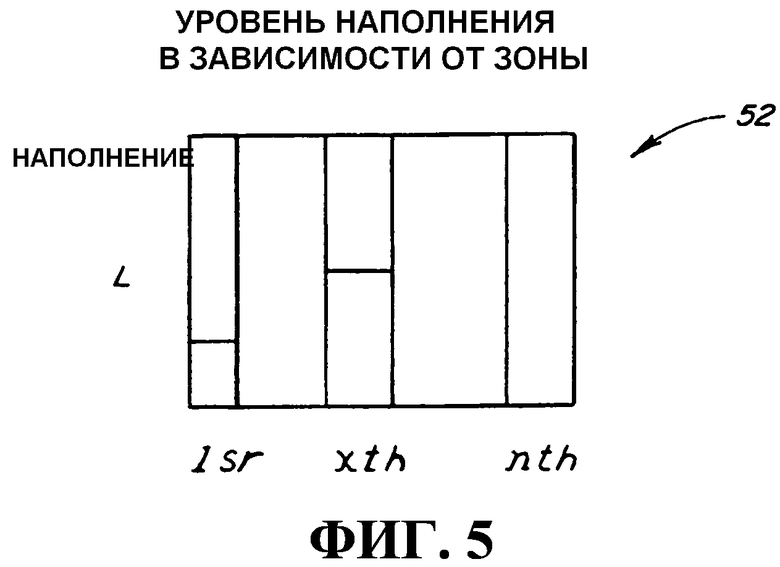
Фиг.5 представляет собой типичный профиль уровня заполнения в реальном времени по меньшей мере для одной из зон принимающего контейнера, который смоделирован с помощью изобретения;
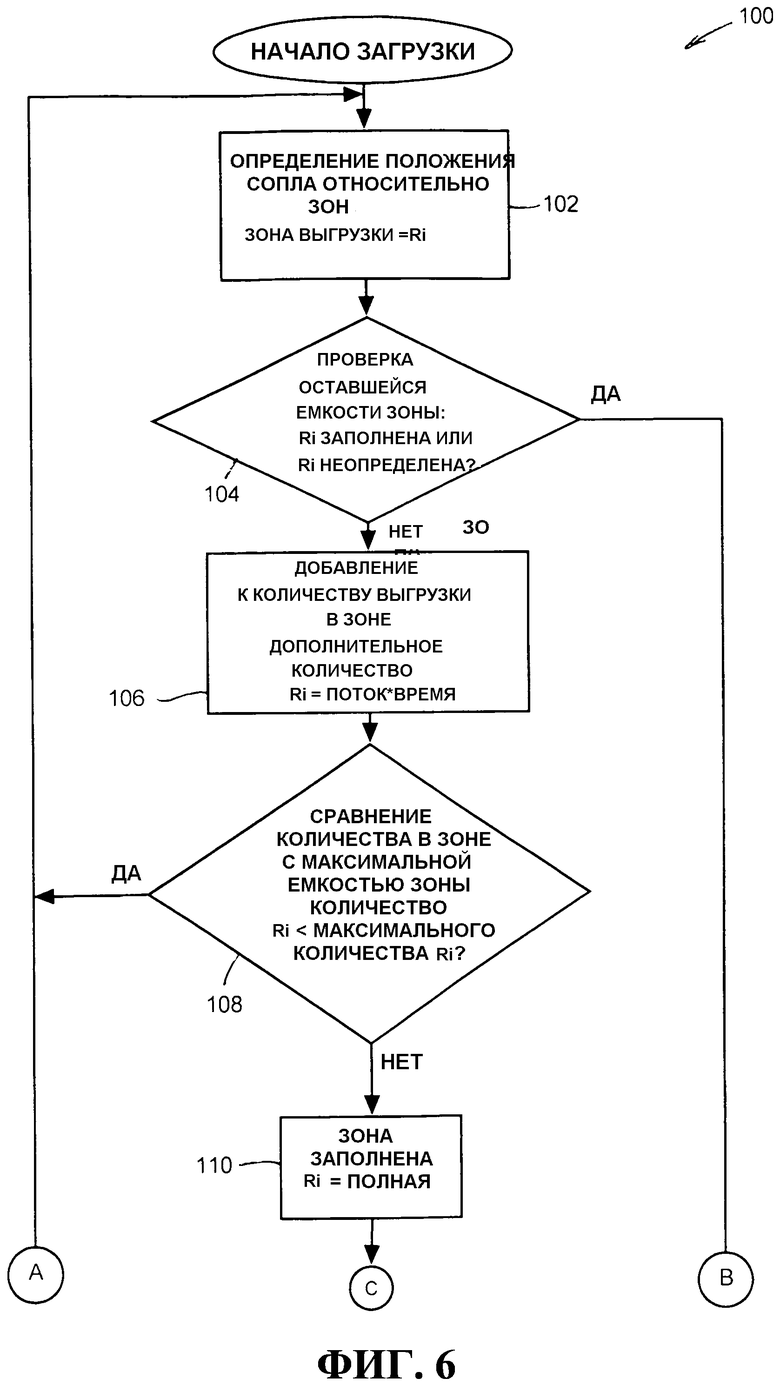
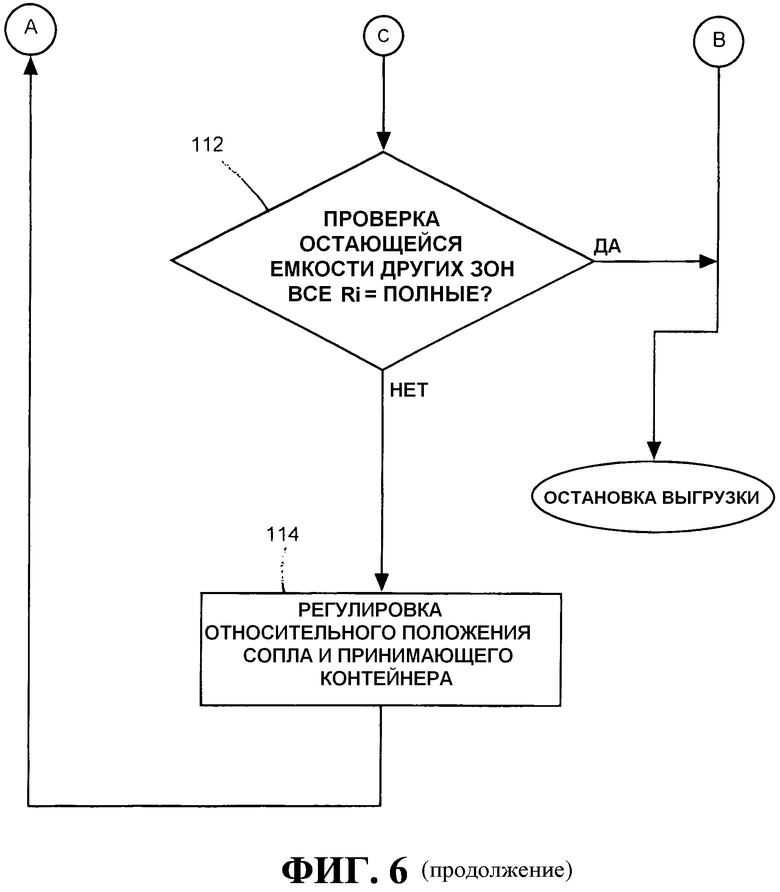
Фиг.6 представляет собой блок-схему высокого уровня, изображающую вариант осуществления стадий для создания профиля уровня заполнения в реальном времени по меньшей мере одной зоны принимающего контейнера;
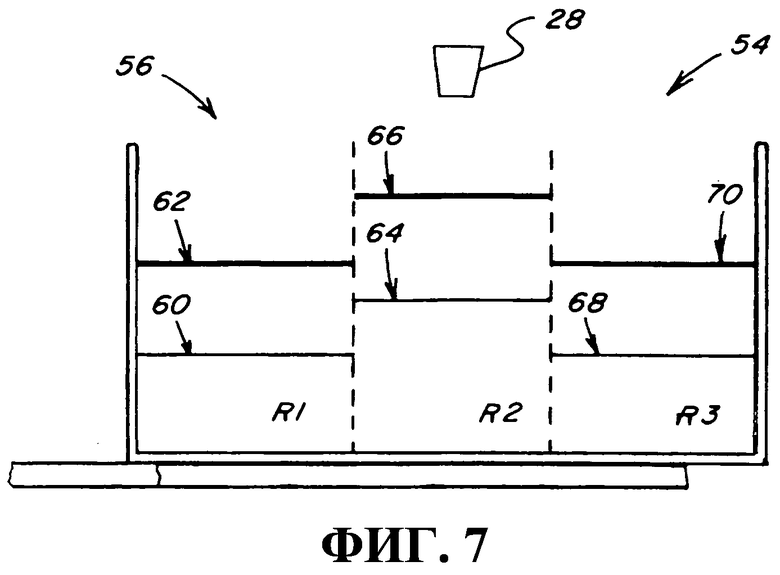
Фиг.7 представляет собой типичный дисплей для использования оператором комбайна или принимающего транспортного средства, представляющий модель в реальном времени профиля сбоку уровня заполнения для принимающего контейнера;
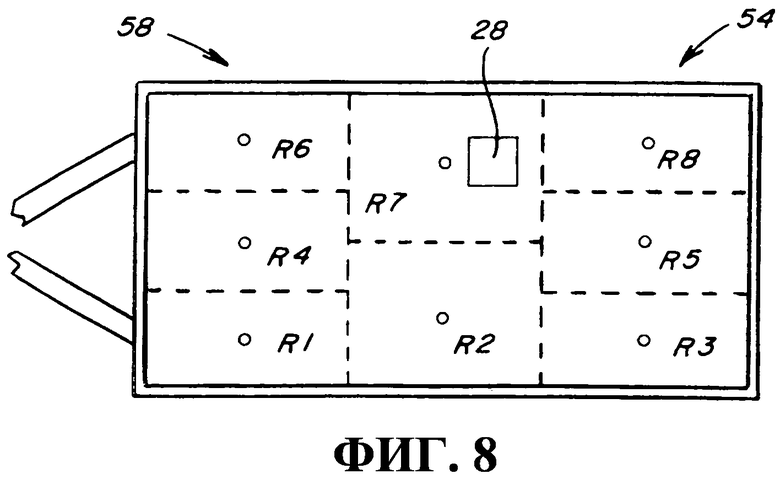
Фиг.8 представляет собой типичный дисплей для использования оператором комбайна или принимающего транспортного средства, представляющий в реальном времени модель профиля сверху уровня заполнения для принимающего контейнера;
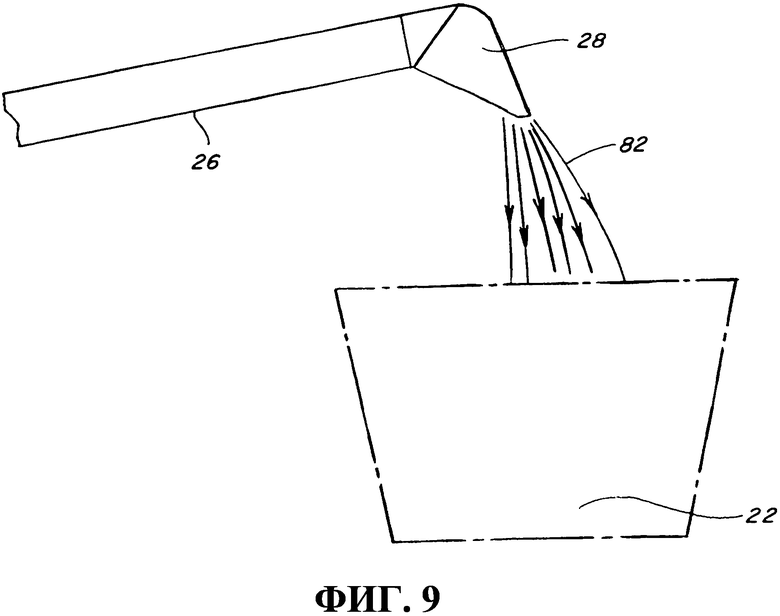
Фиг.9 представляет собой частичный вид сбоку сопла выгрузной трубы, расположенного над принимающим контейнером, представляющий колебание траекторий потока зерна в зависимости от различных ориентаций сопла;
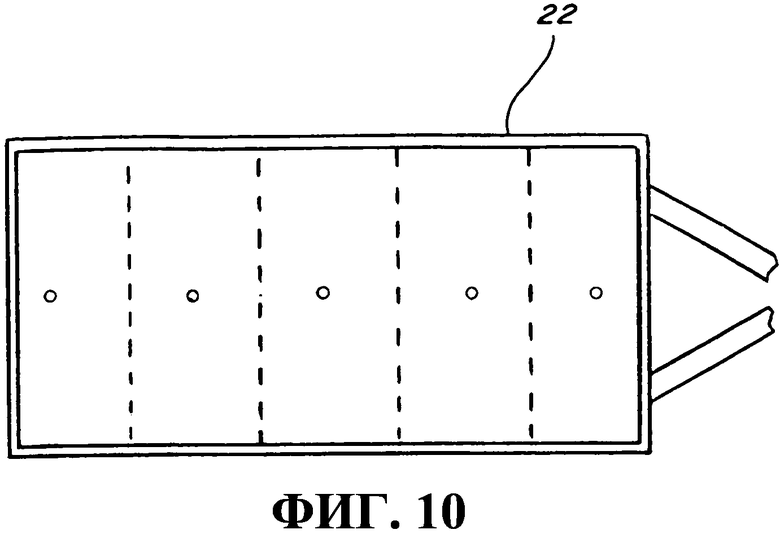
Фиг.10 представляет собой типичное расположение информационных устройств и указание границ зон согласно представленному изобретению;
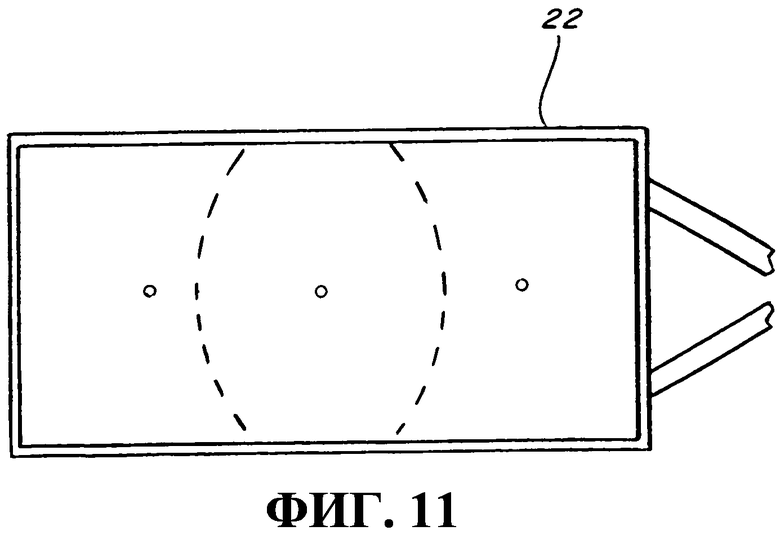
Фиг.11 представляет собой еще одно типичное расположение информационных устройств и указание границ зон согласно представленному изобретению;
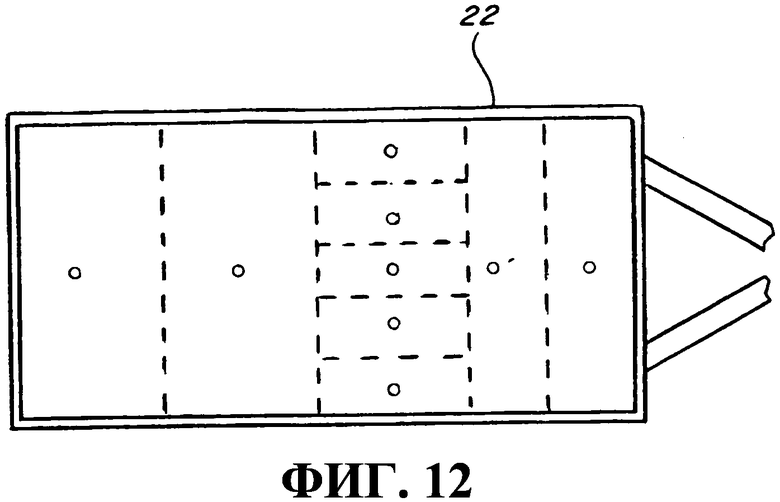
Фиг.12 представляет собой еще одно типичное расположение информационных устройств и указание границ зон согласно представленному изобретению; и
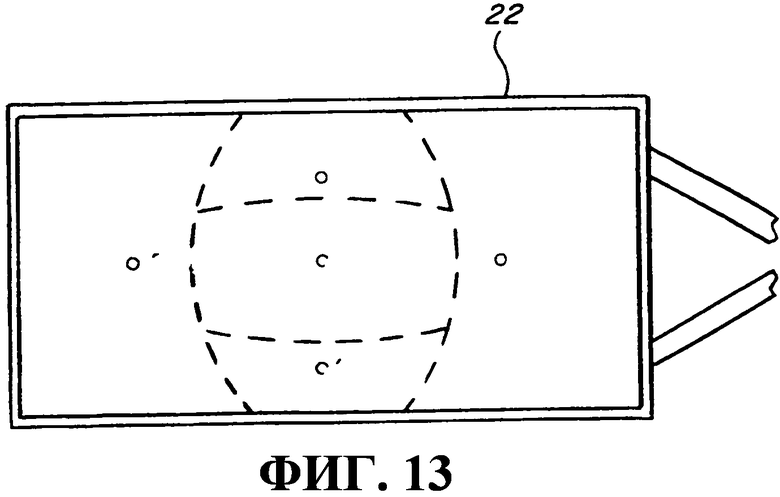
Фиг.13 представляет собой еще одно типичное расположение информационных устройств и указание границ зон согласно представленному изобретению.
Далее со ссылкой на чертежи, на которых одинаковые номера обозначают одинаковые элементы, Фиг.1 изображает типичную сельскохозяйственную уборочную рабочую машину, которая показана в данном случае в виде комбайна 20, содержащую систему 24 выгрузки с хорошо известной конструкцией и функционированием. Имеющая цилиндрическую форму выгрузная труба 26, содержащая выпускное сопло 28, показана в развернутом или выгрузном положении для выгрузки убираемого материала из контейнера 30 на комбайне 30 в сопровождающий контейнер, который в данном случае проиллюстрирован общепризнанным контейнером 22 для приема зерна, расположенным с взаимным расположением в целом бок о бок с комбайном 20, хорошо известным образом. Предполагается, что он является типичным для широкого разнообразия операций разгрузки, когда периодически в процессе работы комбайна 20 известная величина потока зерна из комбайна 20 должна направляться в принимающий контейнер, такой как принимающий контейнер 22. Вне использования, выгрузная труба 26 хранится в положении с протяжением назад (не показано) от комбайна 20 также хорошо известным образом.
Как показано на фиг.1 и 2, система 32 управления перемещением зерна согласно представленному изобретению содержит сенсорную систему 34, включающую в себя считывающее устройство 36, и с первого информационного устройства 38, расположенного в первой зоне 40 принимающего контейнера 22 или в предварительно определенном отношении к ней, по n-ное информационное устройство 42, расположенное в n-ной зоне 44 принимающего контейнера 22 или в предварительно определенном отношении к ней, соответственно. Первое информационное устройство 38 содержит по меньшей мере информацию, свидетельствующую о местоположении первой зоны 40 принимающего контейнера 22, а n-ное информационное устройство 42 содержит по меньшей мере информацию, свидетельствующую о местоположении n-ной зоны 44 принимающего контейнера 22, соответственно. Считывающее устройство 36 установлено на сопле 28 или около него и выполнено с возможностью запрашивания информации от первого информационного устройства 38 по n-ное информационное устройство 42. Сенсорная система 34 выполнена с возможностью определения на основании данной информации, положений сопла 28 относительно первой зоны 40 по n-ную зону 44 в виде функции времени.
Согласно предпочтительному варианту осуществления изобретения, сенсорная система 34 использует технологию радиочастотной идентификации, при этом предпочтительное устройство для считывающего устройства 36 содержит радиочастотный приемопередатчик, а предпочтительное устройство для информационных устройств 38, 42 с первого по n-ное содержит радиочастотные приемоответчики, соответственно. Приемопередатчик выполнен с возможностью автоматического запрашивания во время работы приемоответчиков с первого по n-ный и получения сохраненной информации от приемоответчиков с первого по n-ный, соответственно. Приемоответчики с первого по n-ный выполнены с возможностью автоматической мобильной выдачи при запрашивании информации, свидетельствующей о местоположении зон 38, 42 с первой по n-ную, соответственно.
Согласно аспекту изобретения, по меньшей мере одно из первого информационного устройства 38 по n-ное информационное устройство 42 дополнительно содержит информацию, свидетельствующую по меньшей мере об одном из: общей емкости принимающего контейнера 22; дате и времени уборки; местоположениях и условиях полей; информации, характерной для зерна, которая может содержать тип семян, вносимые химические препараты, условия произрастания и содержание влаги; и тому подобное.
Репрезентативный пример положения сопла в зависимости от времени графически показан в виде графика 46, фиг.3. В дополнение к положениям сопла в виде функции времени, система 32 перемещения зерна использует известные скорости потока зерна из сопла в каждом положении сопла. Как использовано в данном описании, известная скорость потока зерна включает в себя определяемые, предполагаемые, полученные или иным образом установленные скорости потока зерна. Репрезентативный пример скоростей потока в различные моменты времени во время операции разгрузки графически показан в виде графика 48, фиг.4.
Обращаясь также к фиг.3-5, система 50 моделирования, включающая в себя процессор, выполнена с возможностью взаимодействия с сенсорной системой 34 и моделирования профиля уровня заполнения в реальном времени по меньшей мере для одной зоны принимающего контейнера 22. Репрезентативный пример подобного смоделированного профиля уровня заполнения показан в виде профиля 52, фиг.5. Со ссылкой на фиг.3-5, в течение иллюстративного периода времени T, сопло 28 направляет поток зерна в x-ую зону принимающего контейнера 22 со скоростью потока F. В конце времени T, система 50 моделирования отображает смоделированный уровень L заполнения в x-ой зоне, который соответствует сумме зерна в x-ой зоне перед временем T и зерна, находящегося в x-ой зоне в течение времени T.
Блок-схема, показанная на фиг.6, содержит часть типичного порядка работы 100, который может выполняться системой 50 моделирования. Когда процесс выгрузки начинается, определяется положение сопла 28 относительно первой зоны 40 по n-ную зону 44, при этом зона, в которую выгружается сопло 28, обозначена, как Ri в блоке 102. Положения сопла 28, например, могут определяться посредством взаимодействия с сенсорной системой 34. Если сопло 28 расположено над зоной, которую система 50 моделирования определила, как полную, или если сопло 28 не расположено над какой-либо зоной, процесс выгрузки останавливается для предотвращения рассыпания, как видно в блоке 104 ветвления. В противном случае система 50 моделирования обновляет модель профиля уровня заполнения (например, профиля 52) в соответствии с повышением уровня заполнения для зоны Ri, как видно в блоке 106. Повышенный уровень заполнения зоны Ri сравнивается с известной максимальной емкостью зоны Ri в блоке 108. Если смоделированный профиль уровня заполнения показывает, что зона Ri не заполнена, процесс выгрузки продолжается. Однако, если смоделированный профиль показывает, что зона Ri является полной, система 50 моделирования ищет смоделированный профиль уровня заполнения для других зон в блоке 112. Если по меньшей мере одна зона не заполнена, система 50 моделирования предоставляет указание для регулирования относительных положений сопла 28 и принимающего контейнера 22 в блоке 114. Если смоделированный профиль уровня заполнения показывает, что все зоны принимающего контейнера 22 заполнены, процесс выгрузки останавливается для предотвращения рассыпания вследствие переполнения.
Согласно аспекту изобретения, дисплейная система 54 выполнена с возможностью отображения информации, свидетельствующей о смоделированном профиле уровня заполнения в реальном времени для оператора комбайна 20 и/или оператора принимающего транспортного средства, такого как трактор, (не показан) для управления движением принимающего контейнера 22. Фиг.7-8 представляют смоделированные профили уровня заполнения и текущего положения сопла 28 для принимающего контейнера 22, разделенного на 8 зон, обозначенные R1-R8. Фиг.7 изображает смоделированный профиль 56 сбоку уровня заполнения зон R1-R3 принимающего контейнера 22. Зона R3 имеет максимальный уровень заполнения, обозначенный 62, и в настоящее время заполнена до уровня заполнения, обозначенного 60. Аналогичным образом, зона R3 имеет максимальный уровень заполнения, обозначенный 70, и в настоящее время заполнена до уровня заполнения, обозначенного 68. В заключение, зона R2 имеет максимальный уровень заполнения, обозначенный 66, и в настоящее время заполнена до уровня заполнения, обозначенного 64. Важно заметить, что максимальный уровень заполнения 66 зоны R2 больше, чем максимальный уровень заполнения зон R1 и R3 по причине того, что зона R2 представляет собой большую зону принимающего контейнера 22. Смоделированные боковые профили уровней заполнения зон R4-R8 также могут отображаться по требованию оператора (операторов). Профиль 58 сверху уровня заполнения для принимающего контейнера 22, показанный на фиг.8, представляет вид сверху смоделированного профиля уровня заполнения зон R1-R8. Уровень заполнения зон может быть обозначен цветом на дисплее профиля 58. Например, по мере наполнения зоны, цвет может изменяться с зеленого, когда пустая, до голубого, до желтого и до красного, при наполнении.
Контроллер 72 выполнен с возможностью взаимодействия с системой 50 моделирования и автоматического предоставления контрольной индикации 74 для регулирования положения сопла 28 относительно первой зоны 40 по n-ную зону 44 для направления потока зерна в каждую из n зон, соответственно, для достижения равномерного в целом заполнения принимающего контейнера 22. Контрольная индикация 74 может регулировать положение сопла 28 над зонами принимающего контейнера 22 посредством предоставления указания для регулирования одного или более из относительных положений комбайна 20 и принимающего контейнера 22; положения выгрузной трубы 26 над принимающим контейнером 22; и ориентации сопла 28 над принимающим контейнером 22.
Со ссылкой на фиг.2, контрольная индикация 74 может направлять систему 76 управления комбайна для регулирования положения или скорости комбайна 22. Если комбайн 22 находится в состоянии выгрузки, контрольная индикация 74 может направлять систему 78 управления принимающего транспортного средства или трактора для регулирования положения или скорости для регулирования положения принимающего контейнера 22 относительно комбайна 22. Если система 24 выгрузки позволяет независимое регулирование выгрузной трубы 26 и/или сопла 28, контрольная индикация 74 может направлять систему 80 управления выгрузной трубой/соплом для регулирования положения выгрузной трубы 26 и/или ориентации сопла 28. Фиг.9 изображает типичное колебание траекторий 82 потока зерна в зависимости от настроек в ориентации сопла 28 в одном направлении. Контрольная индикация 74 может включать индикации для одной или более комбинаций систем 76, 78, 80 управления для максимальной гибкости. Например, контрольная индикация 74 может предоставлять указания системе 76 управления комбайна и системе 78 управления трактора уменьшения бокового расстояния между комбайном 22 и принимающим контейнером 22. В качестве альтернативы, или в дополнение, контрольная индикация 74 может предоставлять указание системе 80 управления выгрузной трубой/соплом для ориентации сопла 28 с целью эффективного уменьшения бокового расстояния между соплом 28 и принимающим контейнером 22. Контрольная индикация 74 может разрабатывать или принимать правила для управления выбором соответствующих указаний, или правила или указания могут быть предварительно определены или введены, например, на основании конкретной конфигурации машины и/или других условий или параметров для конкретного применения.
Согласно еще одному аспекту изобретения, контрольная индикация 74 может быть предоставлена оператору комбайна 22 и/или оператору принимающего транспортного средства для ввода информации оператором. Согласно еще одному аспекту изобретения, оператор комбайна 20 может получать контрольную индикацию 74 и обеспечивать комбайну 20, системе 78 управления трактора и системе 80 управления выгрузной трубой/соплом ввод информации оператора.
Фиг.1 и 8 изображают расположения типичной сенсорной системы 34 информационных устройств и соответствующих зон. Фиг.10-13 изображают возможные альтернативные расположения информационных устройств, обозначенные незакрашенными точками, и указания границ соответствующих зон, разграниченные пунктирными линиями. Данные примеры не являются исчерпывающими, и конфигурации могут быть выполнены по требованию для конкретной ситуации выгрузки.
Несмотря на то что приведенное выше обсуждение наиболее конкретно обращено к выгрузке зерна из комбайна в принимающий контейнер, необходимо также понимать и принимать во внимание, что представленное изобретение не ограничено данными типами транспортных средств и выгрузкой зерна, но может быть преимущественно использовано с различными рабочими машинами для согласования перемещения между ними различных, обычно убираемых материалов.
Таким образом, в свете изложенного выше квалифицированные специалисты в данной области должны принимать во внимание, что была показана и описана система управления перемещением зерна на основании моделирования в реальном времени профиля уровня заполнения принимающего контейнера для обеспечения более равномерного уровня заполнения в процессе операции перемещения зерна. Однако также следует принимать во внимание, что, в пределах объема правовых притязаний изобретения, который определен сопровождающей формулой изобретения, является возможным и предусматривается множество изменений, заключающихся в деталях, материалах и расположениях частей и последовательностях операции, которая была описана и проиллюстрирована для объяснения сущности изобретения. Таким образом, несмотря на то, что предшествующее описание и обсуждение адресовано к некоторым предпочтительным вариантам осуществления или элементам изобретения, следует дополнительно понимать, что концепции изобретения, которые основаны на приведенном описании и обсуждении, могут быть легко включены или использованы в других вариантах осуществления и конструкциях без выхода из указанного объема правовых притязаний изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ УПРАВЛЯЕМЫМ ТРАНСПОРТНЫМ УСТРОЙСТВОМ ДЛЯ СОБРАННОГО УРОЖАЯ | 2014 |
|
RU2649142C2 |
| СПОСОБ НАПРАВЛЕНИЯ РАЗГРУЗОЧНОГО УСТРОЙСТВА УБОРОЧНОЙ МАШИНЫ В КОНТЕЙНЕР | 2011 |
|
RU2511295C1 |
| КАРТА ПРИЗНАКОВ УРОЖАЯ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2006 |
|
RU2405299C2 |
| ИЗМЕЛЬЧИТЕЛЬ И РАЗБРАСЫВАТЕЛЬ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЫ | 2015 |
|
RU2714844C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ РАБОТАМИ ПО СБОРУ УРОЖАЯ | 2011 |
|
RU2531004C2 |
| СПОСОБ НАСТРОЙКИ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО РАБОЧЕГО ОРГАНА САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ | 2011 |
|
RU2569958C2 |
| КОВШОВЫЙ ЭЛЕВАТОР | 2017 |
|
RU2664610C1 |
| МОНИТОРИНГ УРОВНЯ ЗАПОЛНЕНИЯ БУНКЕРА ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРОДУКТА | 2009 |
|
RU2499381C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ТРАНСПОРТНОГО СРЕДСТВА, ИСПОЛЬЗУЕМОГО С УБОРОЧНОЙ МАШИНОЙ | 2011 |
|
RU2552960C2 |
| ИЗМЕРИТЕЛЬ СТЕПЕНИ ЗАПОЛНЕНИЯ, СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ КОНТРОЛЯ ЗАПОЛНЕНИЯ ЦЕЛЕВОЙ ОБЛАСТИ | 2010 |
|
RU2529905C2 |


Изобретение относится к области сельскохозяйственной уборочной техники. Система перемещения зерна содержит систему выгрузки, сенсорную систему, систему моделирования, дисплейную систему и контроллер. Система перемещения зерна выполнена с возможностью перемещения зерна из уборочной машины в принимающий контейнер. Принимающий контейнер расположен бок о бок с уборочной машиной. Сенсорная система включает считывающее устройство и информационные устройства. Считывающее устройство расположено возле выпускного сопла. Информационные устройства расположены в зонах приемного контейнера. Сенсорная система выполнена с возможностью определения положения выпускного сопла. Система моделирования моделирует профиль уровня заполнения зон контейнера. Дисплейная система отображает информацию о смоделированном профиле уровня заполнения. Контроллер, на основании полученных от системы моделирования данных, автоматически предоставляет контрольную индикацию для регулирования положения сопла. Обеспечивается возможность равномерного заполнения принимающего контейнера. 20 з.п. ф-лы. 13 ил.
1. Система перемещения зерна для автоматического управления перемещением зерна из уборочной машины (20) в принимающий контейнер (22), в то время как уборочная машина и принимающий контейнер расположены в относительных положениях в общем бок о бок, содержащая:
систему (24) выгрузки, включающую в себя выгрузную трубу (26), имеющую выпускное сопло (28), при этом система (24) выгрузки выполнена и задействована для направления потока зерна из уборочной машины (20) в принимающий контейнер (22) через выпускное сопло (28) с известной скоростью потока,
сенсорную систему (34), включающую в себя считывающее устройство (36), установленное около сопла (28) или на нем, и с первого информационного устройства (38), расположенного в первой зоне (40) принимающего контейнера (22) или в предварительно заданном отношении к ней, по n-ное информационное устройство (42), расположенное в n-ной зоне (44) принимающего контейнера (22) или в предварительно заданном отношении к ней, соответственно, при этом первое информационное устройство (38) содержит по меньшей мере информацию, свидетельствующую о местоположении первой зоны (40) принимающего контейнера (22), а n-ное информационное устройство (42) содержит по меньшей мере информацию, свидетельствующую о местоположении n-ной зоны (44) принимающего контейнера (22), соответственно, при этом считывающее устройство (36) выполнено с возможностью получения информации от первого информационного устройства (38) по n-ное информационное устройство (42), причем сенсорная система (34) выполнена с возможностью определения положений сопла (28) относительно первой зоны (40) по n-ную зону (44) в виде функции времени,
отличающаяся тем, что система перемещения зерна дополнительно содержит:
систему (50) моделирования, включающую в себя процессор, выполненный с возможностью взаимодействия с сенсорной системой (34) и моделирования профиля (52) уровня заполнения в реальном времени по меньшей мере для одной зоны (40, 44) принимающего контейнера (22) в качестве функции положений (46) сопла (28) в виде функции времени и известных скоростей (48) потока зерна;
дисплейную систему (54), выполненную с возможностью отображения информации, свидетельствующей о смоделированном профиле (52) уровня заполнения, в реальном времени; и
контроллер (72) во взаимодействии с системой (50) моделирования и выполненный с возможностью автоматического предоставления контрольной индикации (74) для регулирования положения сопла (28) относительно первой зоны (40) по n-ную зону (44) для направления потока зерна в каждую из n зон, соответственно, для достижения равномерного в целом заполнения принимающего контейнера (22).
2. Система перемещения зерна по п.1, в которой система (50) моделирования выполнена с возможностью автоматического получения известных скоростей (48) потока и положений (46) сопла (28) в виде функции времени и моделирования профиля (52) уровня заполнения по меньшей мере для одной из первой зоны (40) по n-ную зону (44) на основании известных скоростей потока на протяжении интервалов времени, когда сопло (28) направляет поток зерна с первой зоны (40) по n-ную зону (44), соответственно, и для обновления профиля (52) уровня заполнения по мере доставки потока зерна в принимающий контейнер (22).
3. Система перемещения зерна по п.2, содержащая устройство для мониторинга перемещения зерна из уборочной машины (20) и генерирования сигнала, свидетельствующего о скорости (48) потока зерна.
4. Система перемещения зерна по п.1, в которой дисплейная система (54) выполнена с возможностью отображения информации, свидетельствующей о смоделированном профиле (52) уровня заполнения, по меньшей мере для оператора уборочной машины (20).
5. Система перемещения зерна по п.1, в которой по меньшей мере одно из первого информационного устройства (38) по n-ное информационное устройство (42) дополнительно содержит информацию, свидетельствующую по меньшей мере об одном из: общей емкости принимающего контейнера (22); дате и времени уборки; местоположений и условий полей; и информации, характерной для зерна.
6. Система перемещения зерна по п.1, в которой считывающее устройство (36) содержит радиочастотный приемопередатчик, а информационные устройства (38, 42) с первого по n-ное содержат радиочастотные приемоответчики, при этом приемопередатчик выполнен с возможностью запрашивания приемоответчика с первого по n-ный и получения сохраненной информации от первого приемоответчика по n-ный приемоответчик, соответственно, а приемоответчики выполнены с возможностью мобильной выдачи хранящейся в них информации при запрашивании приемопередатчиком.
7. Система перемещения зерна по п.1, в которой контроллер (72) также выполнен с возможностью предоставления контрольной индикации (74) оператору уборочной машины (20), обеспечивая возможность регулирования относительного положения уборочной машины (20) и принимающего контейнера (22).
8. Система перемещения зерна по п.1, в которой контроллер (72) также выполнен с возможностью автоматического управления уборочной машиной (20) для регулирования относительного положения уборочной машины (20) и принимающего контейнера (22).
9. Система перемещения зерна по п.1, в которой принимающее транспортное средство управляет движением принимающего контейнера (22).
10. Система перемещения зерна по п.9, в которой контроллер (72) также выполнен с возможностью автоматического управления принимающим транспортным средством для регулирования относительного положения уборочной машины (20) и принимающего контейнера (22).
11. Система перемещения зерна по п.9, в которой дисплейная система (54) выполнена с возможностью отображения информации, свидетельствующей о смоделированном профиле (52) уровня заполнения, для оператора принимающего транспортного средства.
12. Система перемещения зерна по п.9, в которой контроллер (72) также выполнен с возможностью автоматического предоставления контрольной индикации (74) оператору принимающего транспортного средства, обеспечивая возможность регулирования относительного положения уборочной машины (20) и принимающего контейнера (22).
13. Система перемещения зерна по п.9, в которой система выполнена с возможностью управления оператором уборочной машины (20) перемещением принимающего транспортного средства для регулирования относительного положения между ними.
14. Система перемещения зерна по п.9, в которой оператор рабочей машины (20) и оператор принимающего транспортного средства могут координировать относительное перемещение в качестве функции отображения смоделированного профиля уровня заполнения первой зоны по n-ную зону принимающего контейнера (22).
15. Система перемещения зерна по п.1, в которой выгрузная труба (26) выполнена подвижной относительно уборочной машины (20).
16. Система перемещения зерна по п.15, в которой оператор уборочной машины (20) управляет положением выгрузной трубы (26) относительно уборочной машины (20) для регулирования положения сопла (28) относительно первой зоны (40) по n-ную зону (44), соответственно.
17. Система перемещения зерна по п.9, в которой оператор принимающего транспортного средства управляет положением выгрузной трубы (26) относительно уборочной машины (20) для регулирования положения сопла (28) относительно первой зоны (40) по n-ную зону (44), соответственно.
18. Система перемещения зерна по п.15, в которой оператор принимающего транспортного средства управляет положением выгрузной трубы (26) относительно уборочной машины (20) для регулирования положения сопла (28) относительно первой зоны (40) по n-ную зону (44), соответственно.
19. Система перемещения зерна по п.1, в которой контроллер (72) также выполнен с возможностью автоматической остановки потока зерна, когда положение сопла (28) вызывало бы доставку потока зерна за пределы принимающего контейнера (22) или в зону, имеющую смоделированный профиль (52) уровня заполнения, свидетельствующий, что зона является полной.
20. Система перемещения зерна по п.1, в которой контроллер (72) также выполнен с возможностью автоматического регулирования положения сопла (28) относительно первой зоны (40) по n-ную зону (44), соответственно, и с возможностью автоматического регулирования относительного положения уборочной машины (20) и принимающего контейнера (22).
21. Система перемещения зерна по п.1, в которой система (24) выгрузки выполнена с возможностью перемещения зерна из зернового резервуара (30) уборочной машины (20).
| СПОСОБ УДАЛЕНИЯ ПЛЕНОК ИЗ ОРГАНИЧЕСКИХ ВЕЩЕСТВ С ПОВЕРХНОСТИ ВОДЫ | 1992 |
|
RU2044826C1 |
| УСТРОЙСТВО ДЛЯ ОПТИМИЗАЦИИ ПЕРЕГРУЗКИ УБРАННОЙ МАССЫ НА СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2001 |
|
RU2282972C2 |
| JP 2008182945 A, 14.08.2008 | |||
| Зерноуборочный комбайн | 1983 |
|
SU1333257A1 |

