Изобретение относится к способу определения географических координат точек изображения на SAR изображениях согласно признакам пункта 1 формулы изобретения.
Часто определение позиции цели с большого удаления (20-100 км) при использовании SAR изображений является неточным из-за погрешностей на SAR изображениях. Погрешности на SAR изображениях типовым образом возникают из-за азимутальных погрешностей и эффектов искажения (Fore-shortening, Layover).
Из US 5,659,318 А известен интерферометрический способ, в котором полученные с помощью двух пространственно разделенных SAR антенн изображения целевой области анализируются в отношении их фазового сдвига, и при этом в соответствии с ограничительной частью настоящего пункта 1 формулы изобретения позиция съемки SAR изображений известна.
Вначале кратко разъясняется известное определение координат цели по одному SAR изображению.
Основой является так называемый эллипсоид WGS84. Система "World Geodetic System 1984" (WGS 84) является геодезической системой отсчета в качестве единой основы для позиционных данных на Земле и в околоземном пространстве. Она состоит из:
- простой, трехмерной базовой поверхности, базового эллипсоида, который приблизительно соотнесен с земной поверхностью,
- подробной модели, отличающейся от этой идеализированной формы фигуры Земли, так называемого геоида,
- двенадцати распределенных по земной поверхности основных станций, для которых задается отношение между этими моделями и земной корой посредством указания (зависимых от времени) координат (так называемый Reference Frame).
Система является геодезической основой системы глобального позиционирования (GPS), которая обеспечивает геодезическую съемку Земли и ориентирование с помощью подходящих спутников (спутники NAVSTAR).
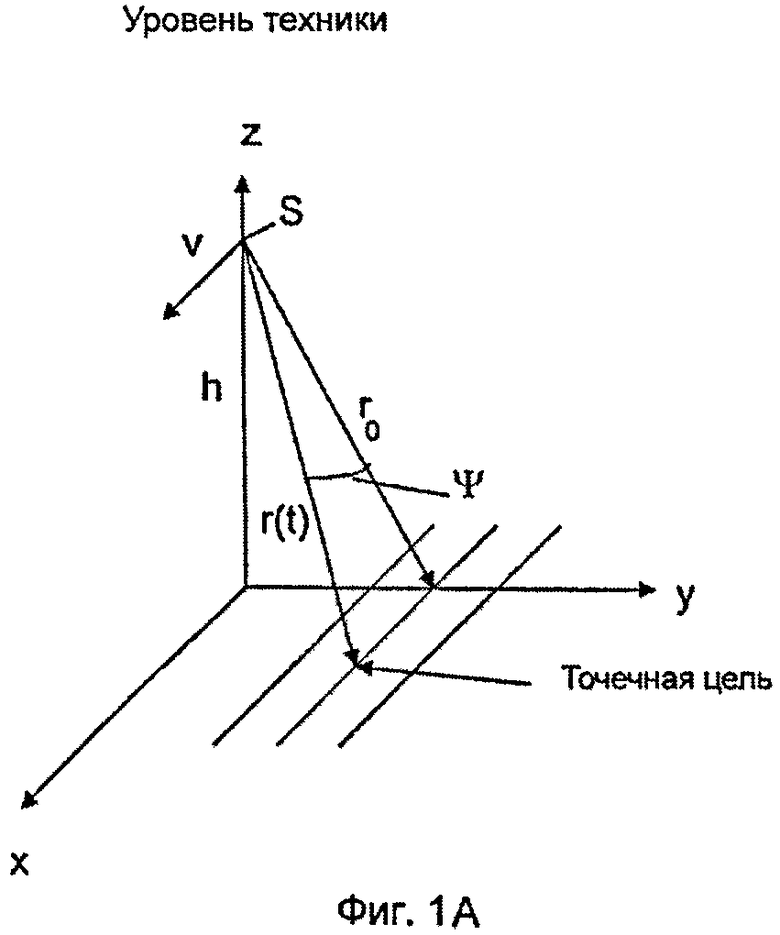
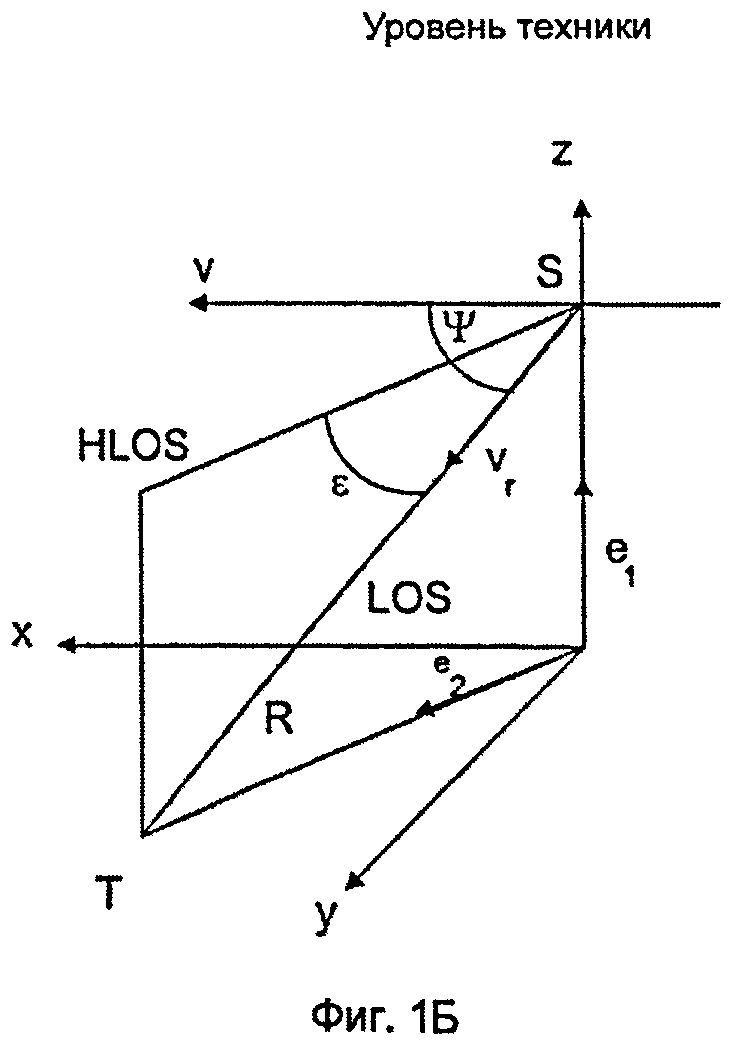
На фиг.1 определены важнейшие величины SAR. На частичном изображении А на фиг.1 показана схема типичной конфигурации SAR. Сенсорная платформа, например самолет, движется на высоте h над земной поверхностью со скоростью v вдоль оси X. Радар облучает сбоку область на земной поверхности. При SAR оптимальное направление обзора составляет 90° относительно направления вектора скорости v. Отклоняющиеся от этого значения направления обзора отрицательно влияют на разрешение, а также на трудоемкость формирования SAR изображений. Размер радарной антенны соответствует реальной апертуре. Для того чтобы иметь возможность перемещения на сенсорной платформе радарной антенны, ее размеры удерживаются относительно малыми. Однако величина антенны или же апертуры определяет разрешение. Чем больше антенна, тем лучше разрешение. Для того чтобы, несмотря на небольшую антенну, добиться высокого разрешения, искусственно формируется большая антенна. Это происходит за счет того, что сенсорная платформа летит вдоль апертуры воображаемой большой антенны и собирает отраженные радарные импульсы с каждого фрагмента воображаемой большой апертуры. То есть сенсорная платформа должна облететь синтетическую апертуру для того, чтобы собрать данные для SAR изображения. После SAR обработки из собранных данных получается SAR изображение. На частичном изображении Б на фиг.1 еще раз подробнее показаны важнейшие SAR параметры. S обозначает позицию сенсорной платформы, а вектор v - соотнесенную скорость. Система координат выбрана так, что v направлен вдоль положительной оси X. Точка Т отображается в центре SAR изображения. Прямая LOS (Line Of Sight) обозначает соединительную линию между позицией S сенсорной платформы и точкой Т. Длина прямой LOS соответствует селекторному импульсу дальности R радара SAR. Проекция вектора v скорости на прямую LOS показывает скорость vr приближения сенсорной платформы к точке Т. Угол ψ между вектором v скорости и прямой LOS здесь обозначается как угол между максимумом диаграммы направленности и осью симметрии зеркала антенны. Проекция прямой LOS на плоскость, которая проходит через точку S и параллельно плоскости XY, дает прямую HLOS (Horizontal Line Of Sight). Угол ψ между LOS и HLOS называется углом отклонения.
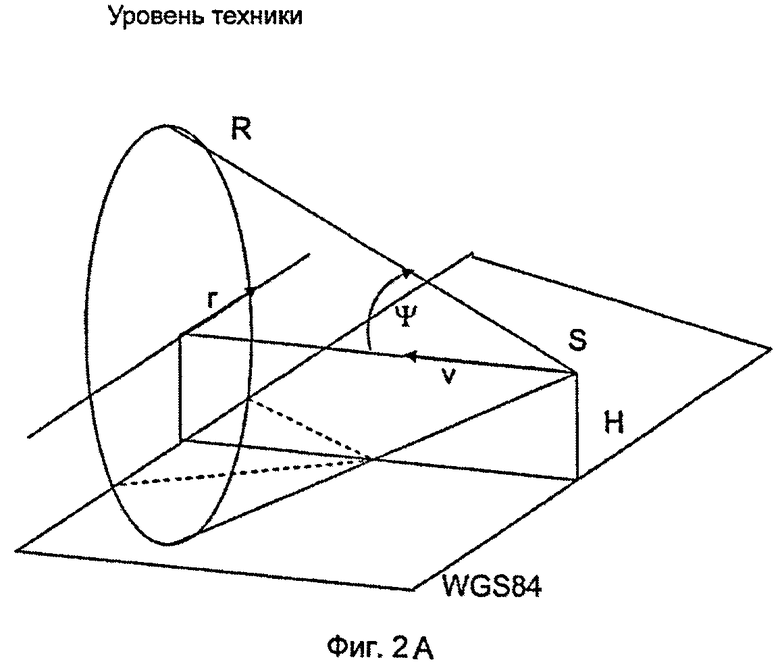
При обычном определении координат цели на основании SAR изображения сначала определяются координаты центра SAR изображения. Затем вычисляются координаты пикселя на SAR изображении, который был опознан как цель. Для определения координат центра изображения используются вышеупомянутые величины SAR. На частичном изображении А на фиг.2 показаны обычно используемые для определения координат цели на основании SAR изображения величины. Сенсорная платформа находится на высоте Н над эллипсоидом WGS84, который показан здесь в существенно увеличенном виде как плоскость. Вектор v скорости вместе с углом ψ между максимумом диаграммы направленности и осью симметрии зеркала антенны и расстоянием R (селекторный импульс дальности) задают конус к центру изображения. Этот конус определяет SAR конфигурацию. Основание конуса задает окружность с радиусом r=R sin(ψ). Географические координаты центра SAR изображения лежат в точке пересечения данной окружности с земной поверхностью. На изображении имеются две точки, где окружность пересекает земную поверхность. Но поскольку известно, куда направлен SAR сенсор, то одну точку пересечения, как известно, можно исключить.
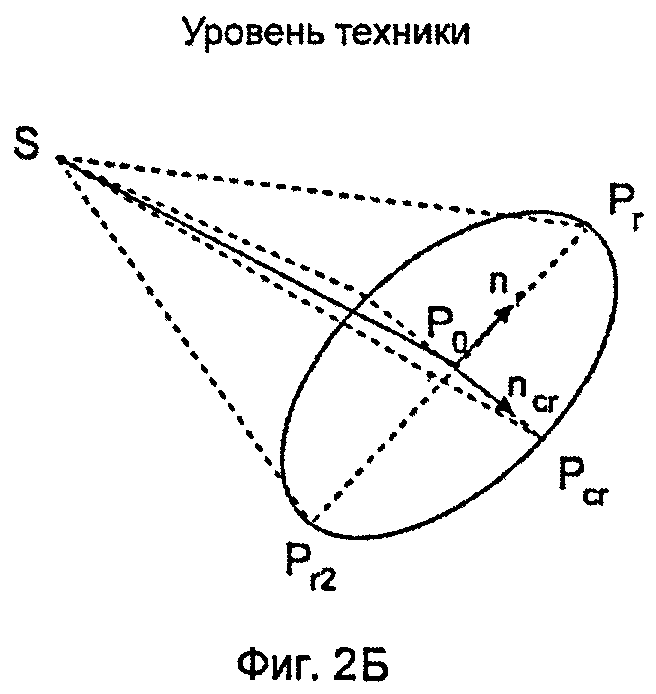
После того, как географические координаты Po центра SAR изображения будут вычислены, производится вычисление географических координат определенного в качестве цели пикселя на SAR изображении. Схема важных для этого величин показана на частичном изображении Б на фиг.2. Для этого вычисляются локальные, приведенные к единице касательные векторы nr и ncr на эллипсоиде WGS84 в точке Po. Поскольку координаты px и py пикселя относительно центра SAR изображения известны, то с использованием известных разрешений δX и δY вектор d сдвига от точки Po к точке, которая соответствует пикселю, вычисляется следующим образом:

Из географических координат центра Po изображения и вектора d сдвига путем простого векторного сложения можно вычислить географические координаты целевого пикселя. Вычисление географических координат точки, которая соответствует пикселю, является уровнем техники и известно специалисту со средней подготовкой.
При известном из уровня техники определении цели на основании SAR изображения описанный выше конус также влияет на определение координат цели. Положение данного конуса в пространстве известно лишь относительно вектора скорости. Если данный вектор скорости точно не известен, то возникает погрешность при определении координат. В обычных SAR системах данная погрешность в азимутальном направлении, в направлении вектора скорости, может достигать до 100 м. Дополнительно после определения географических координат центра изображения предполагается, что целевая плоскость планарная. Однако такие типичные эффекты SAR, как Foreshortening или Layover, создают сдвиг соответствующего целевой точке пикселя, что при расчете вектора сдвига до цели создает дополнительную погрешность.
Задача изобретения заключается в том, чтобы предложить способ, в котором погрешность определения позиции можно уменьшить.
Данная задача решена посредством способа согласно признакам настоящего пункта 1 формулы изобретения. Предпочтительные варианты выполнения изобретения являются предметом зависимых пунктов формулы изобретения.
Согласно изобретению из координат сопряженных точек изображения на SAR изображениях и соответствующих селекторных импульсов дальности определяется соответственно расстояние между каждой разрешающей ячейкой на земной поверхности и каждой позицией съемки соответствующего SAR изображения, и на основании определенных расстояний и соотнесенных позиций съемки SAR изображений с использованием эллипсоида WGS84 определяются географические координаты сопряженных точек изображений на SAR изображениях.
Далее изобретение, а также преимущественные варианты выполнения способа согласно изобретению подробнее разъясняются на основании фигур.
Показано на:
Фиг.1 - схематическое изображение принципа SAR,
Фиг.2 - схематическое изображение известного из уровня техники определения координат цели по одному SAR изображению,
Фиг.3 - схематическое изображение определения дальности пикселя по одному SAR изображению,
Фиг.4 - схематическое изображение принципа определения координат цели по двум изображениям SAR согласно изобретению,
Фиг.5 - схематическое изображение принципа определения координат цели по трем изображениям SAR согласно изобретению.
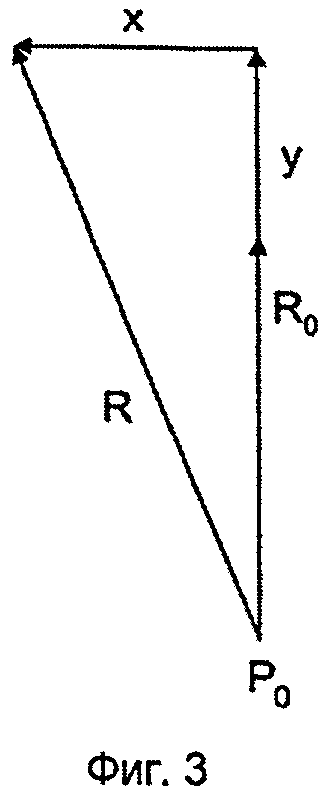
Получение информации о дальности из одного SAR изображения производится следующим образом. В SAR системе для генерации изображения устанавливается селекторный импульс дальности. Данный селекторный импульс дальности определяет дальность между SAR сенсором и соответствующую центру SAR изображения с наклонной дальностью ячейку разрешения на земной поверхности. В дальнейшем данный пиксель обозначается как центральный пиксель. Если как цель задается пиксель, то можно рассчитать удаление до соответствующей пикселю ячейке разрешения на земной поверхности. Это наглядно показано на фиг.3.
На фиг.3 селекторный импульс дальности обозначен как Ro. Расстояние до целевого пикселя обозначается как R. Если координаты x и y целевого пикселя указаны относительно центрального пикселя, то удаление R до данного пикселя можно рассчитать следующим образом:

Величины δX или же δY обозначают разрешение SAR Slant Range изображения в азимутальном направлении или в направлении дальности.
Определение координат посредством использования двух SAR изображений
В дальнейшем будет описано определение координат цели с помощью двух SAR изображений. Если в распоряжении имеются лишь два SAR изображения, то можно извлечь данные по измерению дальности до ячейки разрешения на земной поверхности из SAR Slant Range изображений. Однако для определения координат двух измерений дальности недостаточно. Поэтому в данном методе нужно принять дополнительное допущение о том, что цель находится на эллипсоиде WGS84. На изображении 5 показана схема принципа. Из двух дальностей до цели и соотнесенных позиций, из которых производится измерение, получаются две сферы. У цели есть свойство в том, что она находится на поверхности двух сфер и эллипсоида WGS84. То есть задача заключается в том, чтобы рассчитать множество точек пересечения трех поверхностей. Множество точек пересечения двух сфер в общем случае является окружностью в пространстве. Множество точек пересечения данной окружности с эллипсоидом WGS84 в общем случае состоит из двух точек. Из соображений достоверности одна точка может быть исключена, так как обе точки обычно расположены далеко друг от друга. Поскольку при съемке SAR изображения примерное направление взгляда известно, то одну точку из решения можно исключить. Если известна средняя высота в целевой области, то эту высоту можно использовать для корректировки позиции, соответствующей целевому пикселю ячейки разрешения на земной поверхности.
Проблема описывается посредством приведенных далее обоих уравнений 2 и 3. Здесь x, y и z обозначают искомые координаты цели. Одинаково обозначенные 1 и 2 величины обозначают координаты двух позиций съемки SAR изображений. Два соотнесенные значения дальности до цели обозначены как R1 и R2. Полуоси эллипсоида WGS84 обозначены как А и Б. Таким образом, уравнение 3 описывает, что цель находится на эллипсоиде WGS84.


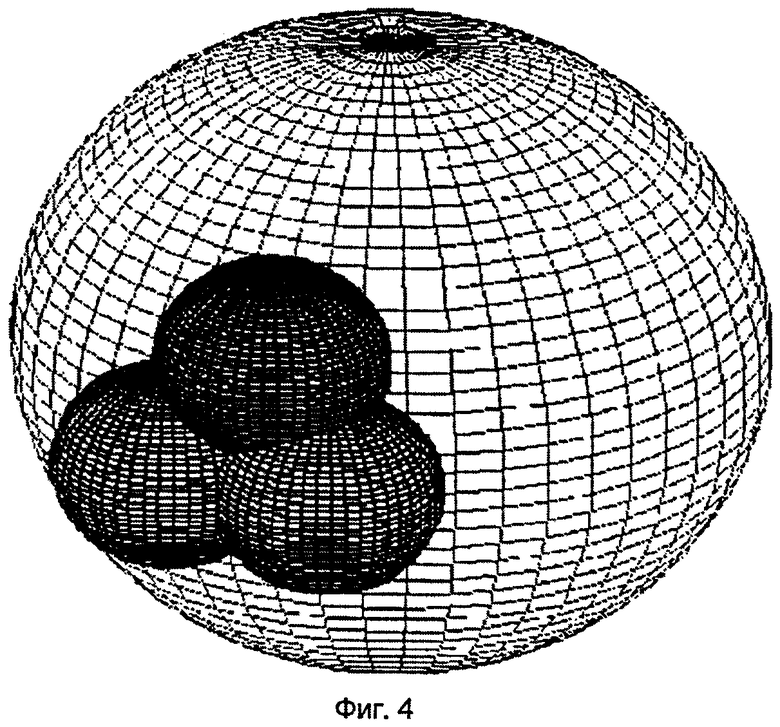
Определение координат посредством использования трех SAR изображений
В дальнейшем будет описано определение координат цели с помощью трех SAR изображений. При определении координат цели с помощью трех SAR изображений полученная из SAR изображений информация о дальности до цели используется для расчета координат. На изображении 4 показана схема принципа. Из трех дальностей до цели и соотнесенных позиций, из которых производится измерение, получаются три сферы. Свойством цели является то, что она лежит на поверхности трех сфер. То есть задача заключается в том, чтобы рассчитать множество точек пересечения трех сфер. Множество точек пересечения двух сфер в общем случае является окружностью в пространстве. Множество точек пересечения данной окружности с третьей сферой в общем случае состоит из двух точек. Обычно одну точку из соображений достоверности можно исключить. Геометрия определения координат обусловливает, что одна точка лежит на поверхности Земли, а другая - далеко над поверхностью Земли. Так как цель находится на земной поверхности, то точку, которая лежит высоко над земной поверхностью, можно исключить из решения.
Проблема описывается следующим уравнением 4:

Здесь x, y и z обозначают искомые координаты цели. Одинаково обозначенные 1, 2 и 3 величины обозначают координаты трех позиций съемки SAR изображений. Три соотнесенных дальности до цели обозначены как R1, R2 и R3.
Изобретение относится к геодезической системе глобального позицирования, обеспечивающей воздушно-базированное определение географических координат сопряженных точек изображения из изображений радара с синтезированной апертурой (SAR), при этом SAR изображения представлены в форме изображений Slant Range, и позиция съемки каждого SAR изображения известна, при этом из координат сопряженных точек изображения на SAR изображениях и соответствующих селекторных импульсов дальности определяют соответственно расстояние между каждой ячейкой разрешения на земной поверхности и каждой позицией съемки соответствующего SAR изображения, и на основании определенных расстояний и соотнесенных позиций съемки SAR изображений с применением эллипсоида WGS84 определяют географические координаты сопряженных точек изображения на SAR изображениях. 1 н. и 3 з.п, ф-лы, 7 ил.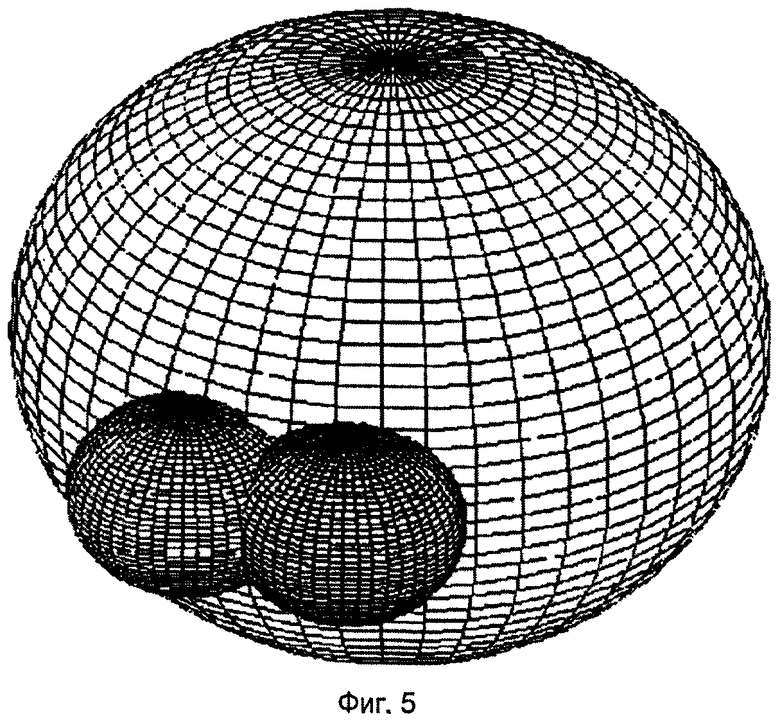
1. Способ воздушно-базированного определения географических координат сопряженных точек изображения из изображений радара с синтезированной апертурой (SAR), при этом SAR изображения представлены в форме Slant Range изображений, и позиция съемки соответствующего SAR изображения известна,
отличающийся тем, что
- из координат сопряженных точек изображения на SAR изображениях и соответствующих селекторных импульсов дальности определяют в каждом случае расстояние между соответствующей ячейкой разрешения на земной поверхности и соответствующей позицией съемки соответствующего SAR изображения, и
- на основании определенных расстояний и соотнесенных позиций съемки SAR изображений с применением эллипсоида WGS84 определяют географические координаты сопряженных точек изображения на SAR изображениях.
2. Способ по п.1, отличающийся тем, что для определения географических координат сопряженных точек изображения используют предварительно заданную для каждого SAR изображения среднюю высоту целевой области.
3. Способ по п.1, отличающийся тем, что для определения географических координат сопряженных точек изображения используют предварительно заданную для каждого SAR изображения карту высот.
4. Способ по одному из предшествующих пунктов, отличающийся тем, что для определения географических координат сопряженных точек изображения из цифровых изображений радара с синтезированной апертурой используют два или три SAR изображения.
| US 2006028372 A1, 09.02.2006 | |||
| US 2008074313 A1, 27.03.2008 | |||
| US 7277042 B1, 02.10.2007 | |||
| US 7245250 B1, 17.07.2007 | |||
| US 2004090360 A1, 13.05.2004 | |||
| RU 2007141646 A, 20.05.2009 |

