Изобретение относится к радиолокации, в частности к бортовым радиолокационным средствам навигации летательных аппаратов (ЛА), обеспечивающим получение в полете ЛА радиолокационных изображений (РЛИ) земной поверхности и сопоставление этих изображений с заранее подготовленными опорными (эталонными) изображениями.
Сопоставление получаемых в полете (рабочих) радиолокационных изображений с опорными связано с поиском максимума некоторой двумерной функции, отражающей взаимную корреляцию опорного и рабочего радиолокационных изображений. По координатам этого максимума, определенным при изменении взаимного относительного положения рабочего и опорного радиолокационных изображений, формируются оценки координат ЛА.
Известен способ, описанный в [1], в соответствии с которым бортовая радиолокационная система (БРЛС), входящая в состав бортовой системы управления беспилотным летательным аппаратом (БПЛА), с использованием сканирования антенны просматривает пространство в горизонтальной плоскости:
перед БПЛА (в режиме приведения БПЛА к радиоконтрастному объекту);
от нулевого положения антенны, совпадающего с плоскостью стрельбы, до крайнего углового положения сектора измерений (в режиме приведения БПЛА к не радио контрастному объекту).
В процессе обзора формируется массив A(i, j) измерений радиолокационных сигналов, с присвоением каждому элементу массива соответствующего значения угла Ψi поворота антенны и дальности Dj, соответствующей измеряемому отраженному сигналу.
Далее этот массив подвергается корреляционной обработке путем сравнения измеренного массива с последовательно перебираемыми бинарными последовательностями B(i, j) фрагментов заранее подготовленной эталонной карты.
По результатам этой обработки определяется расположение измеренного массива на эталонной карте, продольная ось которой ориентирована вдоль плоскости стрельбы. Смещение ближнего левого участка поверхности, где измеряется отраженный сигнал, относительно левой нижней точки эталонной карты определяет ошибки приведения БПЛА в заданную точку на дистанции проведения измерений.
Недостатком данного способа является то, что азимутальное разрешение формируемого радиолокационного изображения определяется шириной диаграммы направленности антенны радиолокационного координатора, что не позволяет осуществлять достаточно точную «привязку» получаемого радиолокационного изображения к эталону. Кроме того, преобразование полярных координат (Ψi, Dj) в прямоугольную (XOZ) осуществляется простым переприсвоением номеров (i, j) массива A(i, j) в номера линейных координат X и Z, что также существенно снижает точность производимых вычислений навигационных ошибок.
Данный способ имеет существенное отличие от предлагаемого, заключающееся в том, что в предлагаемом способе используется БРЛС с синтезированием антенного раскрыва (CAP).
Известен способ, описанный в [2], в соответствии с которым оценку плановых навигационных ошибок летательного аппарата (ЛА) получают с помощью оценки положения максимума двумерной взаимокорреляционной функции (ВКФ) эталонного (опорного) и рабочего (получаемого в полете) радиолокационных изображений (РЛИ) заданного (опорного) участка местности.
До получения рабочего РЛИ с целью сокращения объема расчетов при цифровой обработке сигнала рабочего РЛИ и снижения вероятности неверной выставки антенны по углу места в точке коррекции траектории ЛА при сканировании антенной бортового радиолокационного датчика выполняются процедуры:
- оценки вектора собственной скорости ЛА по известному алгоритму [3];
- оценки средних углов места ярких точек на РЛИ, формируемых в процессе сканирования, по которым определяется средняя высота ЛА относительно этих ярких точек;
- расчетной оценки высоты ЛА над местностью в окрестности приоритетной точки заданного участка местности путем усреднения высот «ярких» точек по множеству парциальных кадров РЛИ.
Эталонное РЛИ рассчитывается в полярной системе координат (присущей радиолокационному датчику) для каждой точки коррекции.
Эталонное РЛИ представляет собой матрицу Aet мощности сигналов, «отраженных» от элементарных участков местности и расположенных в узлах координатной полярной сетки.
Координатная сетка эталонного РЛИ формируется в указанной полярной системе координат в пределах заданных границ строба дальности Rmin и Rmax радиолокационного датчика и границ сектора обзора местности по азимуту Bbeg и Bend.
Рабочее РЛИ заданного участка местности формируется с использованием быстрого преобразования Фурье (БПФ) и некогерентной обработки кадров рабочего РЛИ также в полярной системе координат.
Взаимокорреляционная функция эталонного и рабочего РЛИ, получаемого с использованием CAP, вычисляется по координатам точек эталона относительно каждой точки рабочего РЛИ (относительные положения).
С учетом возможного рассогласования между двумя РЛИ по углу поворота, при расчете взаимной корреляции производится поиск наиболее вероятного угла поворота эталонного РЛИ. Процедура расчета и поиска максимума ВКФ повторяется для заданного (тестового) набора углов взаимного поворота РЛИ. При этом производится селекция самого большого максимума ВКФ.
Затем при заданных параметрах корреляционного сравнения вычисляется взаимный линейный сдвиг двух РЛИ, а также величина взаимного углового сдвига этих РЛИ.
Однако такой способ обладает следующими недостатками.
1. Азимутальный угловой размер радиолокационных изображений объекта наблюдения, формируемых в системе координат «дальность - азимут», изменяется при изменении дальности до этого объекта. Например, наблюдаемый участок коррекции поперечной протяженностью 1 км при наблюдении с дистанции 5 км имеет угловую ширину 11,42 град, а с дистанции 6 км - 9,53 град.
Таким образом, в условиях наличия неизвестных плановых ошибок вывода ЛА в точку начала обзора заранее заданного (опорного) участка местности (точку формирования РЛИ [2]) возможно получение радиолокационных изображений этого участка, существенно различающихся азимутальных размеров, что затрудняет их последующую взаимокорреляционную обработку с подготовленным радиолокационным эталоном.
2. Смещение реального положения точки формирования рабочего РЛИ относительно расчетного положения, использовавшегося при формировании эталона, приводит к развороту рабочего РЛИ относительно эталонного, что также затрудняет последующую взаимокорреляционную обработку радиолокационных изображений. Например, при поперечном смещении реального положения точки формирования рабочего РЛИ относительно расчетного на 500 м, дальности до объекта наблюдения 5 км и азимутальном отклонении направления визирования заданного участка местности в режиме РСА от направления вектора скорости ЛА 15 град разворот рабочего РЛИ относительно расчетного составит 9,5 град.
Для устранения этого эффекта известный способ предполагает получение оценок максимума ВКФ с использованием перебора эталонных РЛИ, поворачиваемых на заданные углы.
3. Не учитывается возможность изменения параметров полета ЛА в течение времени формирования кадров рабочего РЛИ, в том числе горизонтальных и вертикальной составляющих скорости полета ЛА, высоты полета. Указанные составляющие тесно связаны с величиной доплеровских частот сигналов, отражаемых элементами наблюдаемого участка местности, на основе оценок которых формируется рабочее РЛИ
Наиболее близким по технической сущности аналогом (прототипом) предлагаемого способа является способ, описанный в [4].
В соответствии с этим способом оценку ошибок счисления плановых навигационных координат летательного аппарата (ЛА) осуществляют в точке коррекции путем сопоставления получаемых в полете (рабочих) радиолокационных изображений с эталонными (опорными) с использованием расчета максимума двумерной функции, отражающей взаимную корреляцию эталонного и рабочего радиолокационных изображений. По положению указанного максимума, найденного при изменении взаимного относительного положения рабочего и эталонного радиолокационных изображений, формируются оценки координат ЛА относительно известного (опорного) участка местности.
Формирование как эталонного (опорного), так и рабочего РЛИ, а также их взаимокорреляционная обработка осуществляются в нормальной земной системе координат (НЗСК) связанной с заданным (опорным - ОУМ) участком местности, а в обеспечение формирования рабочих РЛИ в НЗСК ОУМ в каждой точке коррекции осуществляются:
определение величин поправок ΔVx, ΔVy, ΔVz, Δyла к оценкам значений параметров полета (составляющих скорости и высоты полета ЛА в НЗСК), формируемым (счисляемым) бортовым навигационным комплексом (НК), например инерциальной системой ЛА (данные поправки, затем, при формировании кадров рабочих РЛИ, суммируются с текущими счисляемыми значениями параметров полета ЛА, поступающими от НК ЛА, при этом обеспечивается формирование уточненных оценок текущих значений траекторных параметров полета ЛА);
формирование кадров первичных рабочих РЛИ области ОУМ в системе координат «доплеровская частота - наклонная дальность»;
формирование рабочего РЛИ в нормальной земной системе координат ОУМ на основе первичных рабочих РЛИ с учетом определенных ранее величин поправок к текущим значениям траекторных параметров полета, формируемым (счисляемым) бортовым навигационным комплексом ЛА;
взаимокорреляционная обработка эталонного (опорного) и рабочего РЛИ ОУМ в НЗСК ОУМ и определение коррекций (Δxла, Δzла) плановых координат (xла, zла) ЛА относительно заданной точки на ОУМ.
При рассмотрении достоинств и недостатков прототипа следует отметить относительную простоту формирования поправок ΔVx, ΔVy, ΔVz к оценкам значений составляющих скорости полета ЛА [3] и трудности получения точных оценок, в том числе точных измерений высоты полета ЛА, возникающих при формировании поправок Δyла, особенно при больших значениях высот полета. Применительно к случаю измерения высоты полета с использованием радиовысотомеров эти трудности определяются наличием изменяющегося рельефа местности, над которой осуществляется полет. Кроме того, при формировании рабочих РЛИ в НЗСК должно использоваться значение высоты полета ЛА не над подстилающей поверхностью, а относительно опорных участков местности (ОУМ), смещенных относительно проекции траектории полета ЛА на горизонтальную плоскость. Получение таких относительных оценок на борту ЛА возможно с использованием предварительно подготовленных данных рельефометрии или моноимпульса бортовой РЛС [5]. Однако результирующая точность таких оценок невелика.
Технический результат изобретения заключается в повышении вероятности правильного определения положения ЛА по радиолокационным изображениям земной поверхности и расширении условий возможного применения бортовых радиолокационных средств ЛА, обеспечивающих возможность навигации ЛА по радиолокационным изображениям земной поверхности.
Отличительными признаками предлагаемого способа от прототипа является то, что оценка плановых навигационных ошибок Δxла, Δzла) навигационной системы летательного аппарата формируется путем определения максимума функционала вида Ф[F[JОП(x, z), JP(x, z/yла))], характеризующего изменение максимального значения функции F(Jоп(x, z), JP(x, z/yла)), типа взаимокорреляционной, отражающей подобие заранее подготовленного в НЗСК опорного РЛИ ОУМ JОП(x, z) и ряда рабочих РЛИ ОУМ {JP(x, z/yла=Yn)}, 

Кроме того, предлагаемый способ позволяет осуществлять дополнительную коррекцию плановых навигационных координат (xла, zла) ЛА, когда представляется возможной реализация последующего высокоточного измерения высоты его полета, например, при снижении летательного аппарата.
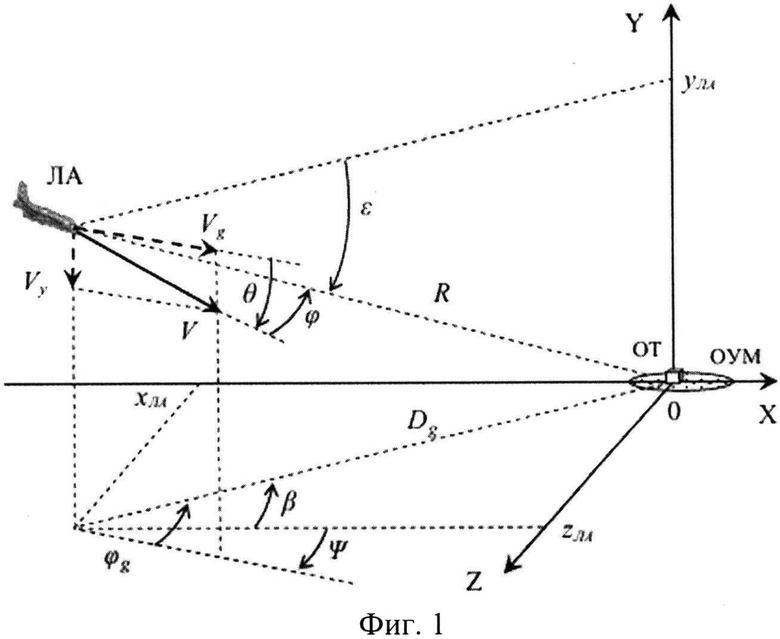
Для определения влияния ошибок оценки высоты полета ЛА на результаты оценивания его навигационных (плановых) координат по ОУМ с использованием БРЛС с CAP, как и в прототипе, будем рассматривать навигацию ЛА в нормальной земной системе координат. Начало этой системы координат для удобства совместим с некоторой опорной точкой (ОТ) на ОУМ (фиг. 1).
В этой СК ось OY направлена вверх по местной вертикали, проходящей через опорную точку (ОТ) на ОУМ. Ось ОХ перпендикулярна оси OY. Ось OZ дополняет систему координат до правой.
Направление оси ОХ определяется условиями задачи, в которых осуществляется навигация ЛА. В том числе, ось ОХ может быть направлена, например, на север или может принадлежать вертикальной плоскости, которой принадлежат точка старта ЛА и ОТ ОУМ, или совпадать с планируемым (расчетным) азимутальным направлением визирования ОТ опорного участка местности, по которому должна осуществляться коррекция траектории полета ЛА.
В рассматриваемой НЗСК координаты каждого элемента ОУМ, соответствующего i-му элементу формируемого рабочего РЛИ, определяются следующими соотношениями.


где:
xла, zла - оценки текущих плановых координат летательного аппарата в НЗСК, формируемые (счисляемые) по данным бортового навигационного комплекса ЛА;


Ψ - оценка угла пути ЛА.
Для величин

где
Ri - оценка наклонной дальности от ЛА до элемента ОУМ, соответствующего i-му элементу формируемого рабочего РЛИ;
hi=Hла-Hi - оценка высоты полета ЛА относительно элемента ОУМ, соответствующего i-му элементу формируемого рабочего РЛИ;
Hла - оценка (счисляемая) абсолютной высоты полета ЛА;
Hi - оценка абсолютной высоты элемента ОУМ, соответствующего i-му элементу формируемого рабочего РЛИ;

Vx - оценка проекции скорости полета ЛА на ось X;
Vz - оценка проекции скорости полета ЛА на ось Z;
λ - длина волны зондирующих сигналов БРЛС.
С учетом того, что


из (4) и (5) получим
 ф
ф

где:

Приведенные выражения связывают оценки плановых координат элемента ОУМ, соответствующего i-му элементу рабочего РЛИ, формируемого БРЛС ЛА, со значениями траекторных параметров (xла, hi, zла, Vx, Vy, Vz) полета летательного аппарата.
Как известно [6], значения ошибок оценки параметра p=f(q1, q2, …, qN) как функции измеряемых координат q1, q2, …, qN при малых отклонениях Δq1, Δq2, …, ΔqN, могут быть определены с использованием формулы полного дифференциала

где 
Применительно к рассматриваемой задаче оценки значений составляющих скорости полета ЛА могут быть получены с весьма высокой точностью [3]. В связи с этим далее ограничимся рассмотрением влияния на формирование РЛИ только навигационных ошибок ЛА по положению.
Полагая, что бортовой РЛС также с высокой точностью определяются наклонные дальности и доплеровские частоты отраженных сигналов, для ошибок определения координат элементов формируемого рабочего РЛИ в НЗСК ОУМ с использованием формулы полного дифференциала из (8) и (9) получим


где


- коэффициенты чувствительности плановых координат элементов формируемого в НЗСК рабочего РЛИ (по x и z) к ошибкам оценки текущей относительной высоты полета ЛА;

Из (12), (13) текущие поправки к плановым навигационным координатам ЛА, определяемые относительно опорной точки ОУМ


где Δyла=ΔhОТ, ошибка оценки высоты полета ЛА (yла=hОТ) в НЗСК ОУМ.
Значения ΔxОТ, ΔzОТ, как указано выше (см. (1)), определяются с использованием оценки максимума функции F(JОП(x, z), JP(x, z)), отражающей меру взаимной корреляции опорного JОП(x, z) и рабочего JP(x, z) радиолокационных изображений в НЗСК ОУМ.
Из выражений (12), (13) видно, что плановые ошибки (Δxла, Δzла) счисления координат ЛА приводят в НЗСК ОУМ к одинаковым смещениям всех элементов формируемого рабочего РЛИ и не влекут за собой его искажений и разворота.
Из этих же выражений видно, что влияние относительных ошибок вывода ЛА в точку визирования ОУМ по высоте (Δhi) на плановые ошибки (Δxi, Δzi) оценок координат элементов ОУМ имеет нелинейный характер и увеличивается при увеличении отношения hi к Ri, росте модуля скорости изменения высоты полета (Vy) ЛА во время формирования рабочего РЛИ, а также в условиях переднебокового обзора (когда скорость сближения ЛА с элементами ОУМ, определяемая соотношением 
На фиг. 2а) приведено изображение в НЗСК тестового ОУМ, включающего в свой состав 9 радиолокационных отражателей, расположенных на плоскости XOZ и находящихся друг от друга на расстоянии 500 метров. Опорная точка ОУМ (центр НЗСК) совмещена с центральным отражателем.
На фиг. 2б) приведены отметки, соответствующие действительному положению указанных радиолокационных отражателей, и отметки (крестообразные), полученные в результате формирования в НЗСК ОУМ соответствующего рабочего радиолокационного изображения, при следующих параметрах полета ЛА:
направление вектора скорости ЛА
угол между осью OX HЗСК ОУМ и азимутальным
ошибки счисления координат ЛА
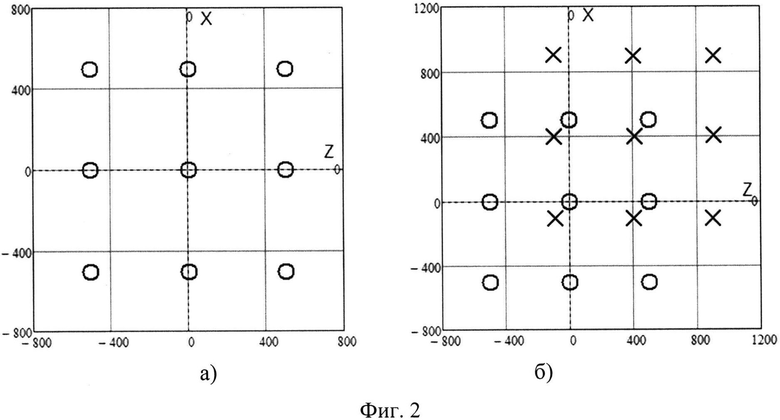
На фиг. 3 приведены отметки, соответствующие действительному положению указанных радиолокационных отражателей, и отметки, полученные в результате формирования в HЗСК ОУМ рабочих радиолокационных изображений для указанных выше, условий полета ЛА при значениях:
ошибок счисления координат ЛА по оси Y HЗСК ОУМ:
Из фиг. 3 видно, что в указанных условиях полета ЛА ошибки оценки текущей высоты полета ЛА приводят к существенному сдвигу и искажению рабочих РЛИ, формируемых в HЗСК ОУМ.
Указанные искажения могут быть столь велики, что возможность осуществления взаимной привязки опорных и рабочих РЛИ может оказаться под вопросом.
Эти искажения РЛИ уменьшаются при стремлении ошибок оценки текущей высоты полета ЛА к нулю.
Следует отметить, что в случае, когда осуществляется наблюдение ОУМ с разновысотными элементами, при формировании рабочего РЛИ ОУМ в HЗСК для различающихся (i≠j) элементов ОУМ приходится полагать: hi=hj. Обычно принимается hi=hj=hОТ=yла, где hОТ - высота полета ЛА относительно ОТ ОУМ.
При этом для преобразования первичных рабочих РЛИ из системы координат «доплеровская частота - наклонная дальность» в ЗСК ОУМ могут использоваться следующие выражения:


где:

Очевидно, что в этом случае смещение элементов ОУМ относительно плоскости XOZ по высоте (yi≠0) эквивалентно наличию соответствующих ошибок в определении их относительных высот hi. Данные ошибки влекут за собой плановые искажения рабочих РЛИ в НЗСК, формируемых с использованием (19), (20). Однако, эти искажения предсказуемы и могут учитываться при построении опорных РЛИ.
Уменьшение искажений РЛИ, формируемых в полете, при стремлении ошибок оценки высоты полета к нулю определяет целесообразность уточнения оценок плановых координат ЛА (xла, zла), путем определения максимума функционала вида Ф[F(JОП(x, z), JP(x, z/yла)), характеризующего изменение максимального значения функции F(JОП(x, z), JP(x, z/yла)), типа взаимокорреляционной, отражающей подобие заранее подготовленного в НЗСК опорного РЛИ ОУМ JОП(x, z) и ряда рабочих РЛИ ОУМ {JP(x, z/yла=Yn)}, 

Если положить, что оценка текущей высоты полета, формируемая (счисляемая) бортовым НК ЛА, равна Yнк, то значения {Yn},
При этом

где:



 - значение поправки ΔYn, к счисленным данным НК ЛА, при которой достигается максимум Ф(·).
- значение поправки ΔYn, к счисленным данным НК ЛА, при которой достигается максимум Ф(·).
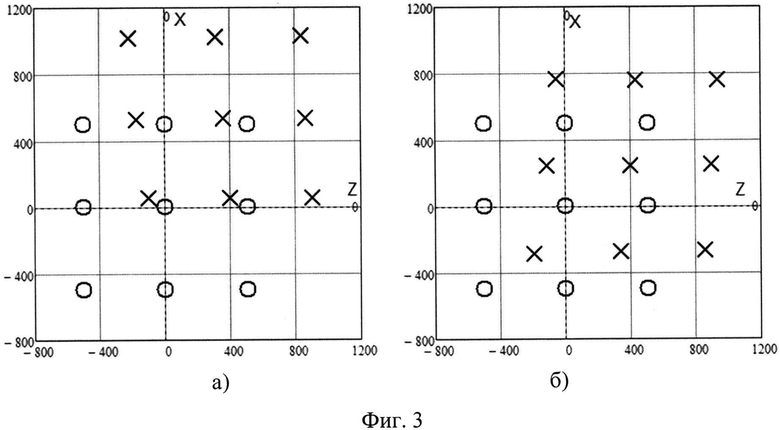
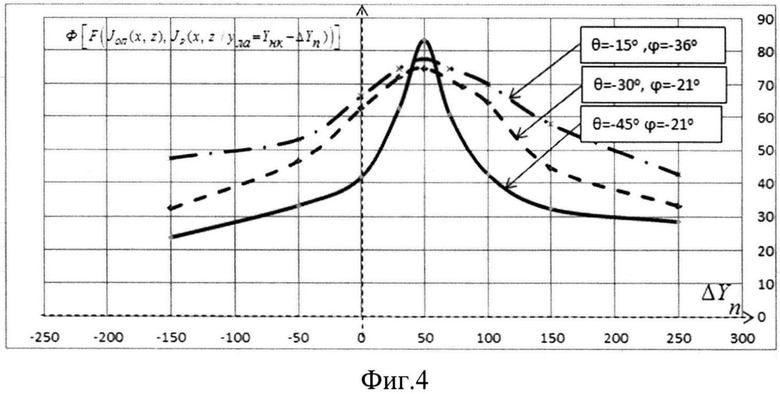
На фиг. 4 приведен график, отражающий зависимость функционала Ф[F(JОП(x, z), JP(x, z/yла=Yнк-ΔYn))] от ΔYn, рассмотренных выше тестовой позиции и условий полета ЛА при отклонении значения высоты полета ЛА, счисленного НК, от ее действительного значения, на величину 50 м. Также приведены аналогичные графики для углов снижения ЛА минус 15° и минус 45° при равенстве остальных траекторных параметров.
При получении данных зависимостей предполагалось, что наблюдаемые отметки радиолокационных отражателей тестовой позиции имеют диаметр (протяженность) 30 метров, а

где ⊗ - символ, обозначающий двумерную свертку опорного и рабочего радиолокационных изображений.
Зависимости, представленные на рисунке фиг. 4, имеют максимумы, выраженные в разной степени. Несимметричность этих зависимостей объясняется нелинейностью изменения значений величин cos(εi) и sin(εi), при отрицательных и положительных отклонениях расчетных значений высоты полета ЛА от ее реального значения.
Представляется очевидным, что при малой остроте пика функционала Ф[F(JОП(x, z), JP(x, z/yла=Yнк-ΔYn))], оценки Δxла=ΔxОТ, Δzла=ΔzОТ, соответствующие максимуму Ф(·), (когда предполагается, что в (17) и (18) Δyла=0) могут формироваться с неприемлемыми ошибками.
В том случае, когда рассмотренная коррекция плановых координат ЛА осуществляется в процессе его приведения к земной поверхности, т.е. на этапе снижения летательного аппарата, представляется возможным последующее уточнение поправок к этим координатам (Δxла, Δzла) при появлении возможности непосредственного высокоточного измерения высоты полета
При этом задача определения максимума функционала Ф[F(JОП(x, z), JP(x, z/yла=Yнк-ΔYn))], рассматривается как предварительная измерительная процедура, в процессе реализации которой по критерию минимума рассогласования (максимума согласования) рабочего и опорного РЛИ формируются оценки 

 , а также с использованием (14) и (15) рассчитываются коэффициенты чувствительности
, а также с использованием (14) и (15) рассчитываются коэффициенты чувствительности 

Затем, в процессе последующего приведения ЛА к земной поверхности поправки (Δxла, Δzла) к счисляемым плановым координатам ЛА формируются «обратным пересчетом» с использованием выражений (17), (18), в которые подставляются ранее рассчитанные значения 



где:
yнк - текущее значение высоты полета снижающегося ЛА в НЗСК ОУМ ПК счисляемое НК;
YП - значение высоты расчетной точки приведения ЛА к земной поверхности в НЗСК ОУМ (определяется одновременно с подготовкой опорного РЛИ);
hT - текущая непосредственно измеренная бортовыми средствами высота полета ЛА над подстилающей поверхностью.
Осуществление «обратного пересчета» возможно, когда:
а) изменение величины ошибки счисления высоты полета навигационным комплексом за время, прошедшее с момента окончания коррекции координат ЛА по ОУМ, можно считать незначительным [7];
б) по мере приближения ЛА к заданной точке его приведения различия в текущей высоте полета ЛА относительно этой точки и подстилающей поверхности в НЗСК ОУМ исчезают (иначе, влияние рельефа местности становится незначительным).
Математическое моделирование, проведенное для рассмотренных выше условий полета ЛА, подтвердило возможность использования «обратного пересчета» поправок к плановым координатам ЛА.
С учетом изложенного, предлагаемый способ навигации летательного аппарата по радиолокационным изображениям земной поверхности, формируемым БРЛС ЛА с использованием синтезирования антенного раскрыва реализуется следующим образом.
1. При подготовке полетного задания ЛА определяются подлежащие наблюдению опорные участки местности, по радиолокационным изображениям которых должна осуществляться коррекция плановых координат ЛА. Для каждого ОУМ назначается опорная точка, относительно которой должна осуществляться коррекция плановых координат ЛА, задаются начало координат и направления осей НЗСК ОУМ, исходя из условий навигационной задачи. Определяются условия начала формирования рабочих РЛИ ОУМ, например: достижение летательным аппаратом заданной дальности до ОТ, заданной на ОУМ.
2. Для каждого ОУМ перед полетом или в процессе выполнения полета формируются в выбранной НЗСК опорные РЛИ.
3. В полете осуществляется формирование кадров первичных рабочих РЛИ ОУМ с использованием CAP в системе координат «доплеровская частота - наклонная дальность».
4. Задается множество расчетных значений {Yn}, 
5. Для каждого значения высоты полета ЛА из заданного набора расчетных значений высот осуществляется (с использованием выражений (14), (15) или (19), (20)) преобразование кадров первичных рабочих РЛИ из системы координат «доплеровская частота - наклонная дальность» в совокупность (массив) кадров рабочих РЛИ в выбранной НЗСК.
С целью устранения спекл-эффекта осуществляется некогерентное суммирование кадров рабочих РЛИ ОУМ, сформированных в НЗСК из кадров первичных РЛИ ОУМ при одинаковых расчетных значениях высоты полета ЛА.
6.Производится сопоставление опорного РЛИ ОУМ и каждого РЛИ ОУМ из состава сформированной в НЗСК совокупности рабочих радиолокационных изображений опорного участка местности с оценкой максимумов функции, отражающей взаимную корреляцию указанных РЛИ при изменении взаимного положения рабочего и опорного РЛИ по координатам X, Z.
По результатам сопоставления формируется множество значений максимумов функции, отражающей взаимную корреляцию в НЗСК опорного и рабочих РЛИ ОУМ. Каждый из этих максимумов соответствует конкретному задаваемому расчетному значению высоты полета ЛА.
7. На основе сопоставления значений максимумов функции, отражающей взаимную корреляцию опорного и рабочих РЛИ ОУМ в НЗСК, в качестве поправок к оценкам плановых координат ЛА принимаются те расчетные значения поправок, для которых величина указанного максимума является наибольшей.
8. В том случае, когда острота пика функционала Ф[F(JОП(x, z), JP(x, z/yла=Yнк-ΔYn))], определенная в соответствии с некоторым заданным решающим правилом, например по его половинному уровню, является недостаточной и имеется возможность последующего более точного определения значений текущей высоты полета и, следовательно, величин соответствующих поправок к значениям высоты полета, формируемым НК ЛА, осуществляются:
запоминание оценки поправки  , соответствующей значению ΔYn, при которой достигается максимум функционала Ф(·);
, соответствующей значению ΔYn, при которой достигается максимум функционала Ф(·);
вычисление коэффициентов чувствительности 


 .
.
9. Измерение значения текущей высоты полета ЛА и формирование уточненной текущей поправки YП+hТ к ее текущим значениям yнк, поступающим от НК ЛА.
10. Расчет уточненных значений поправок к текущим плановым координатам ЛА, формируемым НК летательного аппарата в СК ОУМ

где Δyла определяется в соответствии с (25)
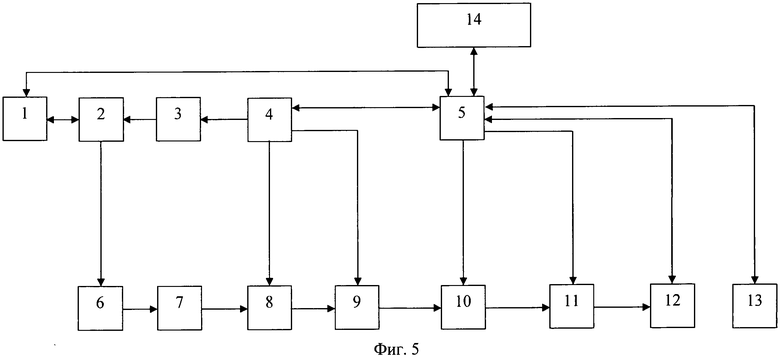
На фиг. 5 представлена упрощенная структурная схема возможного варианта БРЛС, реализующей предлагаемый способ навигации летательного аппарата по радиолокационным изображениям земной поверхности, где:
1 - антенна БРЛС;
2 - переключатель прием - передача БРЛС;
3 - передатчик БРЛС;
4 - синхронизатор БРЛС;
5 - цифровое устройство управления БРЛС;
6 - когерентный приемник БРЛС;
7 - аналого-цифровой преобразователь;
8 - блок первичной обработки и запоминания траекторного сигнала;
9 - блок преобразования Фурье;
10 - блок преобразования первичного текущего РЛИ из системы координат «доплеровская частота - наклонная дальность» в ЗСК;
11 - блок вычисления максимумов ВКФ эталонного и текущих РЛИ в ЗСК;
12 - блок формирования поправок к плановым навигационным координатам и высоте полета ЛА и расчета коэффициентов чувствительности;
13 - блок измерения высоты;
14 - бортовой навигационный комплекс управления ЛА.
Представленный вариант БРЛС функционирует следующим образом.
При достижении летательным аппаратом участка траектории полета, на котором должна осуществляться коррекция плановых координат ЛА по радиолокационным изображениям земной поверхности, антенна 1 БРЛС под управлением, поступающим от цифрового устройства управления 5, устанавливается по направлению визирования заданного опорного участка местности. Антенна осуществляет излучение зондирующих радиолокационных сигналов, поступающих через переключатель приема-передачи 2 от передатчика 3, управляемого синхронизатором 4 БРЛС, а также прием отраженных сигналов, обеспечивая их пространственную селекцию. Через переключатель приема-передачи 2 принимаемые сигналы поступают на вход приемника 6 БРЛС, с выходов которого в квадратурах поступают на вход многоканального аналого-цифрового преобразователя 7. Преобразованные в цифровую форму принимаемые радиолокационные сигналы перемножаются с опорной функцией в блоке 8 первичной обработки и запоминания траекторного сигнала. Перемножение осуществляется с целью фокусировки синтезируемых радиолокационных изображений наблюдаемого участка земной поверхности. При этом в блоке 8 формируются и запоминаются массивы данных, которые подвергаются быстрому преобразованию Фурье блоком 9, с использованием которого формируются первичные рабочие радиолокационные изображения наблюдаемого участка местности в системе координат «доплеровская частота - наклонная дальность». Эти изображения поступают в блок 10 преобразования первичных рабочих РЛИ из системы координат «доплеровская частота - наклонная дальность»в рабочие РЛИ, представленные в нормальной земной системе координат ОУМ.
Блоком 10 преобразование рабочих РЛИ из системы координат «доплеровская частота - наклонная дальность» в нормальную земную систему координат осуществляется для набора {Yn}, 
С целью устранения спекл-эффекта блоком 10 осуществляется некогерентное суммирование кадров текущих РЛИ ОУМ, сформированных в НЗСК из кадров первичных рабочих РЛИ ОУМ при одинаковых расчетных значениях высоты полета ЛА.
Набор возможных расчетных значений высоты полета ЛА формируется цифровым устройством управления 5 БРЛС на основе данных, поступающих из бортового навигационного комплекса 14 ЛА, в пределах, обеспечиваемых этим комплексом ошибок оценивания указанной высоты.
Из блока 10 рабочие РЛИ, представленные в НЗСК ОУМ, поступают в блок 11, где каждое из этих РЛИ подвергается обработке типа взаимокорреляционной с поступающим из цифрового устройства управления (блок 5) опорным РЛИ наблюдаемого опорного участка местности при взаимном изменении относительного положения рабочего и опорного РЛИ по координатам Х и Z НЗСК.
По результатам этой обработки каждому значению из набора {Yn}, 

Значения указанных максимумов передаются из блока 11 в блок 12, которым осуществляются:
формирование поправок 
 к плановым координатам ОТ ОУМ и высоте полета ЛА на основе сопоставления значений максимумов функции F(JОП(x, z), JP(x, z/yла=Yнк-ΔYn)),
к плановым координатам ОТ ОУМ и высоте полета ЛА на основе сопоставления значений максимумов функции F(JОП(x, z), JP(x, z/yла=Yнк-ΔYn)), 
оценка приемлемости полученных поправок по остроте пика функционала Ф[F(JОП(x, z), JP(x, z/yла=Yнк-ΔYn))], 
расчет значений коэффициентов чувствительности 

Сформированные навигационные поправки из блока 12 поступают в цифровое устройство управления БРЛС (блок 5) и далее в бортовой навигационный комплекс (блок 14) летательного аппарата.
Высотомер (блок 13), например, входящий в состав бортового оборудования ЛА, осуществляет измерение текущей высоты полета летательного аппарата, когда появляется такая возможность (например, при последующем снижении ЛА). Результаты этих измерений поступают из блока 13 в блок 5, который в соответствии с (25) и (26) осуществляет расчет и выдачу в навигационный комплекс ЛА уточненных значений поправок к плановым координатам ЛА в НЗСК ОУМ.
Предлагаемый способ навигации летательного аппарата по радиолокационным изображениям земной поверхности прошел математическое моделирование и экспериментальную апробацию.
Результаты исследований подтвердили работоспособность предлагаемого способа навигации летательного аппарата по радиолокационным изображениям земной поверхности.
Предлагаемый способ навигации летательного аппарата по радиолокационным изображениям земной поверхности позволяет обеспечить высокую точность получения оценок плановых навигационных координат ЛА с помощью бортовых радиолокационных средств.
Использование предлагаемого способа не накладывает никаких существенных ограничений на элементную базу и вполне возможно при существующих характеристиках вычислителей БРЛС с CAP по их быстродействию и объему памяти.
Литература
1. Система управления беспилотным летательным аппаратом. Патент РФ №2189625 от 20.09.2002, МПК G05D 1/12, F41G 7/36.
2. Способ навигации летательного аппарата по радиолокационным изображениям земной поверхности с использованием цифровых моделей местности. Патент РФ №2364887 от 25.09.2007, МПК G01S 13/90.
3. Козаев А.А., Колтышев У.У., Фролов Ф.Ю., Янковский В.Т. Алгоритм доплеровского измерения скорости в РЛС с синтезированной апертурой. // Радиотехника, 2005, №6, с.13.
4. Способ навигации летательного аппарата по радиолокационным изображениям земной поверхности. Патент РФ №2483324 от 23.11.2011, МПК G01S 13/90.
5. Патент США US №5430445, 12.31.1992, G01S 13/90.
6. Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения / под. ред. А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника, 2003.
7. Бабич О.А., Доброленский Ю.П., Козлов М.С. и др. Авиационные приборы и навигационные системы / Под ред. О.А. Бабича. - М.: ВВИА им проф. Н.Е. Жуковского, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| Способ формирования изображения земной поверхности в радиолокационной станции с синтезированием апертуры антенны | 2016 |
|
RU2614041C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННОМУ ИЗОБРАЖЕНИЮ | 2017 |
|
RU2656366C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ С ПРЕДВАРИТЕЛЬНОЙ ФОКУСИРОВКОЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2792964C2 |
Изобретение относится к радиолокации, в частности к бортовым радиолокационным средствам навигации летательных аппаратов (ЛА). Достигаемый технический результат - повышение вероятности правильного определения положения ЛА по радиолокационным изображениям (РЛИ) земной поверхности и расширение условий возможного применения бортовых радиолокационных средств ЛА, обеспечивающих возможность навигации ЛА по РЛИ земной поверхности. Технический результат изобретения достигается путем формирования в полете ЛА радиолокационного изображения земной поверхности в системе координат ″наклонная дальность - доплеровская частота″, преобразования этого изображения в набор РЛИ в нормальной земной системе координат с учетом априорно формируемых поправок к данным о высоте полета ЛА, счисляемым навигационным комплексом летательного аппарата, и последующей взаимокорреляционной обработки сформированных РЛИ с заранее подготовленным опорным (эталонным) радиолокационным изображением. 5 ил.
Способ навигации летательного аппарата по радиолокационным изображениям земной поверхности, заключающийся в том, что для определения и коррекции данных о текущих навигационных координатах летательного аппарата в каждой точке коррекции осуществляют определение величин поправок к текущим значениям составляющих скорости полета летательного аппарата, измеряемых его бортовым навигационным комплексом, с учетом определенных величин поправок к значениям составляющих скорости полета, формируют в процессе коррекции с помощью бортовой радиолокационной станции с синтезированием антенного раскрыва кадры первичных рабочих радиолокационных изображений района опорного участка местности (по которому осуществляется коррекция координат) в системе координат «доплеровская частота - наклонная дальность», с учетом определенных величин поправок к значениям составляющих скорости полета летательного аппарата, формируемым бортовым комплексом управления летательного аппарата, осуществляют преобразование кадров первичных рабочих радиолокационных изображений опорного участка местности из системы координат «доплеровская частота - наклонная дальность» в нормальную земную систему координат, отличающийся тем, что при преобразовании первичных синтезированных рабочих радиолокационных изображений из системы координат ″доплеровская частота - наклонная дальность″ в нормальную земную систему координата априорно задают множество значений поправок к значению высоты полета летательного аппарата, счисляемому его навигационным комплексом, для каждой поправки из заданного множества значений поправок к счисленной высоте полета осуществляют преобразование кадров первичных рабочих радиолокационных изображений из системы координат «доплеровская частота - наклонная дальность» в совокупность кадров рабочих радиолокационных изображений в выбранной нормальной земной системе координат, осуществляют некогерентное суммирование кадров рабочих радиолокационных изображений района опорного участка местности, сформированных в нормальной земной системе координат из кадров первичных радиолокационных изображений района опорного участка местности при одинаковых расчетных значениях поправок к высоте полета летательного аппарата, производят сопоставление опорного радиолокационного изображения опорного участка местности и каждого радиолокационного изображения района опорного участка местности из состава сформированной в нормальной земной системе координат совокупности рабочих радиолокационных изображений района опорного участка местности с оценкой максимумов функции, отражающей взаимную корреляцию указанных радиолокационных изображений при изменении их относительных плановых координат, по результатам сопоставления формируют множество значений максимумов функции, отражающей взаимную корреляцию в нормальной земной системе координат опорного и рабочих радиолокационных изображений района опорного участка местности, на основе сопоставления значений максимумов функции, отражающей взаимную корреляцию опорного и рабочих радиолокационных изображений района опорного участка местности в нормальной земной системе координат, в качестве поправок к оценкам плановых навигационных координат летательного аппарата принимают те расчетные значения поправок, для которых величина указанного максимума является наибольшей, осуществляют запоминание этих значений, а также значения поправки к счисленной высоте полета летательного аппарата, которой соответствует указанный максимум, рассчитывают и запоминают соответствующие значения коэффициентов чувствительности плановых координат опорной точки опорного участка местности к ошибкам оценки текущей относительной высоты полета летательного аппарата, с использованием которых при последующем уточнении значения поправки к счисленной относительно опорной точки опорного участка местности высоте полета летательного аппарата осуществляют расчет уточненных значений текущих значений поправок к его плановым навигационным координатам.
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2003 |
|
RU2234739C1 |
| US 8044846 B1, 25.10.2011 | |||
| US 20070090990 A1, 26.04.2007 | |||
| WO 2011056050 A2, 12.05.2011 | |||
| uS 8212714 B1, 03.07.2012 | |||

