Изобретение относится к области радиотехники и может быть использовано в радиолокационных системах дистанционного зондирования Земли.
Известен способ восстановления радиолокационных изображений, который предполагает получение оценки поля изображения земной поверхности в виде выходного сигнала согласованного фильтра [1]. Однако, процедура согласованной фильтрации принадлежит к классу некорректно поставленных задач, что, помимо наличия систематической и флуктуационной ошибок, приводит к неустойчивости решения задачи восстановления радиолокационных изображений (РЛИ). Так, например, даже при больших отношениях сигнал/шум решение может быть неустойчивым из-за наличия нулей в спектре функции неопределенности, лежащих в пределах полосы пространственных частот изображения, а так же из-за траекторных нестабильностей в процессе движения носителя радиолокатора с синтезированной апертурой антенны (PCA) [2]. Это приводит к снижению разрешающей способности восстанавливаемого РЛИ наблюдаемого участка земной поверхности или вообще делает формирование РЛИ невозможным.
Наиболее близким по технической сущности (прототипом) к заявленному изобретению является способ восстановления радиолокационного изображения, при котором в РСА реализуется алгоритм согласованной обработки траекторного сигнала [3. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для вузов / Под ред. Г.С. Кондратенкова. - М.: «Радиотехника», 2005. с. 135-159]. Его недостатком является снижение разрешающей способности РЛИ при уменьшении отношения сигнал/шум, траекторных искажениях в процессе движения носителя РСА и воздействии других дестабилизирующих факторов.
Целью заявленного изобретения является повышение разрешающей способности восстанавливаемого РЛИ наблюдаемого участка земной поверхности.
Сущность изобретения состоит в следующем. При восстановлении изображений производят дополнительную пространственную фильтрацию данных, поступающих с выхода согласованного приемника, корректирующим фильтром. При этом сужается результирующая аппаратная функция и тем самым уменьшается сглаживание восстанавливаемого радиолокационного изображения. При этом уменьшается систематическая ошибка восстановления.
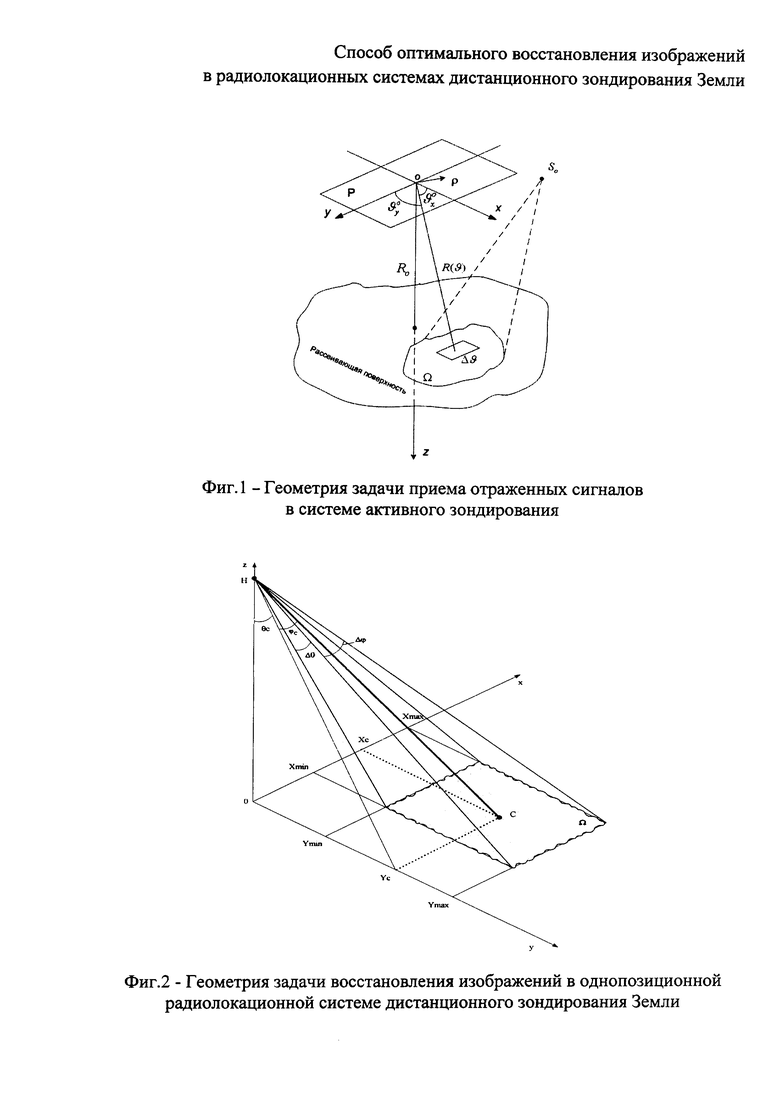
Исследуемый объект облучается с помощью специального источника. Процесс формирования изображений в таких системах заключается в обработке сигнала, отраженного объектом. На фиг. 1 представлена геометрия задачи приема отраженных сигналов, где So - источник зондирующего излучения, Р - плоскость регистрирующего устройства (апертура антенной системы), Ω - область облучения. Выбор того или иного способа задания точек рассеивающей поверхности является вопросом удобства и зависит от конфигурации поверхности и ее ориентации относительно апертуры антенны P.
Рассеивающую поверхность можно задавать параметрически R(ϑ) и соответственно координаты точек (элементов) поверхности определять вектором направляющих косинусов ϑ=(ϑx, ϑy), где  , где
, где  .
.

Отраженный областью Ω сигнал принимается в каждой точке ρ=(х, у) раскрыва антенной системы Р. При отражении от элемента поверхности Δϑ с координатами ϑ=(ϑx, ϑy), т.е. от элемента поверхности, расположенного в телесном угле (ϑ, ϑ+Δϑ), принимаемый сигнал будет иметь вид

Здесь u(t, ϑ) характеризует рассеивающие (отражающие) свойства поверхности и называется удельным коэффициентом рассеяния поверхности; F[⋅] - некоторая функция, учитывающая влияние диаграммы направленности приемной и передающей антенных систем, а также неоднородностей среды распространения; τ(ϑ) - время запаздывания сигнала, отраженного от элемента с координатами ϑ в точке раскрыва ρ=0 (если источник излучения So находится в точке ρ=0, то  ; ΔR(ϑ, ρ) - разность хода лучей, отраженных от элемента поверхности с координатами ϑ, в произвольной точке раскрыва ρ по отношению к точке ρ=0. Для дальней зоны
; ΔR(ϑ, ρ) - разность хода лучей, отраженных от элемента поверхности с координатами ϑ, в произвольной точке раскрыва ρ по отношению к точке ρ=0. Для дальней зоны

Сигнал S(t, ρ), принимаемый на раскрыве антенны и рассеянный всей облучаемой поверхностью Ω, представляет собой суперпозицию (сумму, в пределе интеграл) элементарных отражений (2):

Учитывая наличие внешних и внутренних шумов в каждой точке приема ρ, приходим к обобщенной модели формирования

в которой S является линейным функционалом (4) относительно пространственных реализаций удельного коэффициента рассеяния u(t, ϑ), n(t, ρ) - аддитивный гауссовский шум.
В данном случае задача формирования изображения облучаемого объекта сводится к восстановлению поля u(t, ϑ). Как следует из [4], одним из условий качественного решения задачи восстановления является широкополосность ядра F[⋅], т.е., если это возможно, необходимо использовать зондирующие сигналы, эффективная ширина спектра которых превышала бы ширину пространственного спектра удельного коэффициента рассеяния u(t, ϑ).
Без потери общности продемонстрируем обоснованность изложенных выше рассуждений на характерной для практики задаче восстановления изображений в однопозиционной радиолокационной системе дистанционного зондирования Земли.
Характерной особенностью однопозиционных систем является то, что источник зондирующего сигнала (передающая антенна) и регистрирующее устройство (приемная антенна) совмещены в пространстве, и область наблюдения в этом случае вырождается в одну точку с координатами [0, 0, H]. В качестве зондирующего излучения используется сигнал радиочастотного диапазона  , где s(t) - огибающая высокочастотного гармонического колебания,
, где s(t) - огибающая высокочастотного гармонического колебания,  - несущая частота сигнала.
- несущая частота сигнала.
Введем ряд ограничений, которые несколько упрощают модель формирования входного сигнала, однако не являются принципиальными при использовании разработанной процедуры синтеза алгоритмов обработки. В соответствии с реальными условиями функционирования систем зондирования временные флуктуации функции рассеяния u на интервале наблюдения t∈[0, Tз] полагаются медленными, так что u(t, r)=u(r), где r - вектор пространственных координат в области Ω.
В случае допущения наличия статистически однородной среды распространения наблюдение примет вид

где Y(t, r) - некоторая функция, учитывающая влияние диаграммы направленности антенной системы и неоднородность среды распространения; Sз(t) - зондирующий сигнал, τD(r) - время запаздывания сигнала.
В большинстве случаев данная модель вполне адекватно отражает реальные условия функционирования систем зондирования [2]. Поэтому, если неоднородность среды распространения не является информационным параметром и стабильна на интервале времени t∈[0, Tз], то ее влияние и влияние диаграммы направленности антенны зондирующей системы можно учесть при описании функционального ядра преобразования исходного изображения и компенсировать их совместное влияние известными способами [5]. Поэтому их совместное влияние здесь будем учитывать некоторым детерминированным множителем Y(r).
В этом случае принимаемый сигнал представляет собой суперпозицию рассеянных составляющих зондирующего сигнала с различными амплитудой и временными задержками. При этом полезная информация, как правило, содержится в пространственно распределенных параметрах принимаемого сигнала.
С учетом выше изложенного, модель сигнала на входе однопозиционной радиолокационной системы может быть представлена в виде

Сигнал на выходе синхронного детектора приемного устройства можно представить в виде

где 
Здесь n(t) - гауссовский белый шум (ГБШ) с нулевым средним и корреляционной функцией  ,
,  - круговая частота.
- круговая частота.
Время запаздывания τD(r) отраженного сигнала от элемента с координатами (x, y, z) в соответствии с геометрией задачи определяется дальностью D(х, у, z) до этого элемента

Из выражения (10) видно, что пренебрежение пространственной динамикой изменений рельефа исследуемой поверхности, которое допускается в современных системах зондирования, приведет к существенной погрешности определения τD(r) для каждой из точек Ω. В результате нарушится когерентность системы и увеличится ошибка восстановления.
Восстановление рельефа как стабильного геофизического поля с хорошей картографической обеспеченностью широко используется на практике [6, 7]. Одним из эффективных способов его получения является применение стереограмметрических систем, которые предполагают зондирование одного и того же участка местности с двух различных точек пространства. Однако на практике это сопряжено с проблемами синхронизации, временными и аппаратурно-вычислительными затратами.
Более простым способом учета рельефа является использование постоянно обновляемых баз данных в составе географических информационных систем, содержащих цифровые карты рельефа исследуемой местности и другую априорную информацию [6, 7]. Для географической привязки к ним используется сопряжение с навигационными системами. В результате каждой точке зондируемой поверхности с географическими координатами r=(х, у) ставится в соответствие высота земной поверхности z относительно уровня моря.
Зависимость значения самого удельного коэффициента рассеяния и от рельефа является существенной только при большом перепаде высот зондируемой области, когда образуются зоны радиолокационной тени. Однако при использовании априорных карт рельефа данный фактор также можно учесть [6]. Поэтому в связи с тем, что координата z влияет только на точность измерения дальности до каждой из точек области Ω, в дальнейшем будем считать, что вектор r является двумерным.
На фиг. 2 представлена геометрия задачи восстановления изображений в однопозиционной радиолокационной системе дистанционного зондирования Земли.
Выражение (10) для временной задержки можно также упростить:

Облучаемая область Ω будет представлять собой плоскость, размеры которой определяются срезом диаграммы направленности приемопередающей антенны. При наличии на борту летательного аппарата точной навигационной информации об его географических координатах, высоте над уровнем моря и известной антенной ориентации системы зондирования использование рельефометрических баз данных совместно с измерителем дальности до центра поверхности Ω позволит достаточно точно измерять величину τD(r).
На основе наблюдаемого сигнала (8) и имеющихся априорных сведений необходимо обеспечить оптимальное восстановление изображения зондируемой поверхности.
Для этих целей широко используются радиолокационные станции бокового обзора (радиолокационные станции с синтезированием апертуры (РСА)) [1], которые предполагают движение носителя системы зондирования. В качестве основного метода обработки траекторного сигнала в РСА используется субоптимальный метод согласованного приема [1].
Данный метод предполагает получение оценки поля изображения земной поверхности в виде выходного сигнала согласованного фильтра

Представим выходной сигнал согласованного фильтра Q в виде двух слагаемых

где 

В этом случае получаемое изображение  полностью характеризуется функцией неопределенности,
полностью характеризуется функцией неопределенности,

которая представляет собой (в отсутствие помех) изображение точечного отражающего объекта. Протяженность функции неопределенности по пространственным координатам характеризует разрешающую способность системы зондирования. Так, например, размер элемента разрешения вдоль направления синтезирования определяется протяженностью раскрыва антенны в этом направлении и равен ее половине, а в перпендикулярном направлении (по дальности) - обратно пропорционален ширине спектра зондирующего сигнала [3].
Сигнальная составляющая QS представляет собой восстанавливаемое изображение u(r), сглаженное функцией неопределенности (аппаратной функцией) Ψ(t, r, r'). Следовательно, эта составляющая характеризует систематические ошибки восстановления изображения на выходе согласованного фильтра (обусловленные сглаживанием). Шумовая составляющая Qn - это флуктуации на выходе согласованного фильтра, обусловленные помехой n(t) на входе. Эта составляющая характеризует флуктуационную ошибку восстановления изображения на выходе согласованного фильтра. Кроме того, процедура согласованной фильтрации является некорректной, что, помимо систематической и флуктуационной ошибок, приводит к неустойчивости решения задачи восстановления радиолокационных изображений (РЛИ). Так, например, даже при больших отношениях сигнал/шум решение может быть неустойчивым из-за наличия нулей в спектре функции неопределенности, лежащих в пределах полосы пространственных частот изображения, а так же из-за траекторных нестабильностей в процессе движения носителя РСА [2]. Следовательно, процедура согласованной фильтрации в общем случае нуждается в регуляризации, которая сводится к дополнительной пространственной фильтрации выхода согласованного приемника, т.е., с учетом (13)-(15),

Здесь [1] K(t, r, r') - импульсная характеристика корректирующего фильтра

где Р(r, r') - функция, определяемая способом регуляризации, Ψ0(t, r, r') - обобщенная функция неопределенности

Корректирующий фильтр K оказывает двоякое воздействие на выход согласованного фильтра Q. Во-первых, он сужает результирующую аппаратную функцию Ψ0(t, r, r') (соответствующая частотная характеристика расширяется) и тем самым уменьшает сглаживание восстанавливаемого радиолокационного изображения. При этом уменьшается систематическая ошибка восстановления. Во-вторых, корректирующий фильтр увеличивает помеховую составляющую в выходном эффекте и соответственно увеличивает флуктуационную ошибку восстановления.
При статистической оптимизации с использованием критерия минимума среднего квадрата ошибки (СКО) выбор импульсной характеристики корректирующего фильтра К минимизирует результирующую ошибку воспроизведения (геометрическую сумму флуктуационной и систематической ошибок). Кроме того, регуляризация решения с помощью корректирующего фильтра минимизирует неоднозначность восстановления РЛИ.
В [8] синтезированы общие алгоритмы восстановления неподвижных изображений методами пространственной фильтрации статических случайных полей. Конкретизируя данные алгоритмы применительно к задаче восстановления изображений в системах активного зондирования, получим уравнение для оптимальной по критерию минимума СКО оценки

и выражение для корреляционной функции ошибки восстановления

где mu(r) и Ru(r, r') - априорные математическое ожидание и корреляционная функция модели исходного изображения u(r) соответственно [9].
Более того, сравнивая (18) и (21), можно сделать вывод, что при статистической регуляризации решения задачи восстановления на основе критерия минимума СКО в качестве регуляризирующей функции P(r, r') используется априорная корреляционная функция восстанавливаемого изображения Ru(r, r'). Тогда импульсная характеристика корректирующего фильтра будет определяться корреляционной функцией ошибки восстановления, т.е. в общем случае K(t, r, r')=R(t, r, r'). При этом оценки (17) и (20) совпадают, а обобщенная функция неопределенности (19) примет вид

Таким образом, согласованная фильтрация является частным случаем наиболее общего байесовского метода и используется тогда, когда погрешности формирования траекторного сигнала незначительны.
Данное изобретение является промышленно применимым при разработке перспективных радиолокационных систем с синтезированной апертурой антенны предназначенных для дистанционного зондирования Земли.
Для проверки результатов реализации изобретения было проведено математическое моделирование алгоритмов (12) и (20), (21) для задачи восстановления неподвижной во времени строки изображения в системе активного зондирования земной поверхности на фоне меняющегося ГБШ:

где S(t, u(x)) - сигнал на входе приемника с мощностью PS, L - длина строки изображения, Т - время наблюдения, n(t) - ГБШ с нулевым математическим ожиданием и корреляционной функцией  . В качестве зондирующего сигнала F(t) использовался шумоподобный сигнал. Для априорного описания строки изображения использовалась гауссовская модель с нулевым математическим ожиданием и корреляционной функцией
. В качестве зондирующего сигнала F(t) использовался шумоподобный сигнал. Для априорного описания строки изображения использовалась гауссовская модель с нулевым математическим ожиданием и корреляционной функцией

где Du - дисперсия строки изображения.
Основные качественные показатели системы восстановления РЛИ, реализующей процедуру согласованной фильтрации (разрешающая способность, число разрешаемых элементов изображения, точность оценки координат элементов изображения и др.) полностью определяются видом функции неопределенности [2]. На фиг. 3 представлены функция неопределенности Ψ(Δх), Δх=х2-х1, (согласованная фильтрация) и обобщенная функция неопределенности Ψ0(Δх) (оптимальная фильтрация) для наблюдения, описываемого выражением (23).
Разрешающую способность систем активного зондирования характеризует протяженность δх функции неопределенности Ψ(Δх), определяемая формулой [1]:

где  - нормирующий множитель.
- нормирующий множитель.
Результаты статистического моделирования показали, что корректирующий фильтр сглаживает боковые лепестки функции неопределенности Ψ(Δx) и уменьшает протяженность δx обобщенной функции неопределенности Ψ0(Δх), что соответственно улучшает разрешающую способность и другие качественные показатели системы восстановления РЛИ. Степень сужения функции неопределенности за счет корректирующего фильтра зависит от вида зондирующего сигнала, времени наблюдения (синтезирования) и отношения сигнал/шум.
Для определения качества восстановления РЛИ целесообразно использовать такую характеристику, как средний квадрат ошибки восстановления. Интегральная нормированная статистическая дисперсия ошибки восстановления представляет собой результат статистической обработки оценочных значений  для J реализаций входного сигнала ξj(τ), описываемых выражением (23). Для фиксированного момента времени (t=T), усредненная по всем I элементам строки изображения, данная характеристика будет определяться выражением:
для J реализаций входного сигнала ξj(τ), описываемых выражением (23). Для фиксированного момента времени (t=T), усредненная по всем I элементам строки изображения, данная характеристика будет определяться выражением:

На фиг. 4 отображена зависимость интегральной нормированной статистической дисперсии ошибки восстановления изображения D от отношения сигнал/шум q.
При увеличении отношения сигнал/шум  интегральная нормированная дисперсия ошибки восстановления оптимального фильтра (Dоф) стремиться к нулю, тогда как при согласованной фильтрации (Dсф) этот показатель стремиться к некоему постоянному значению, определяемому параметрами зондирующего сигнала.
интегральная нормированная дисперсия ошибки восстановления оптимального фильтра (Dоф) стремиться к нулю, тогда как при согласованной фильтрации (Dсф) этот показатель стремиться к некоему постоянному значению, определяемому параметрами зондирующего сигнала.
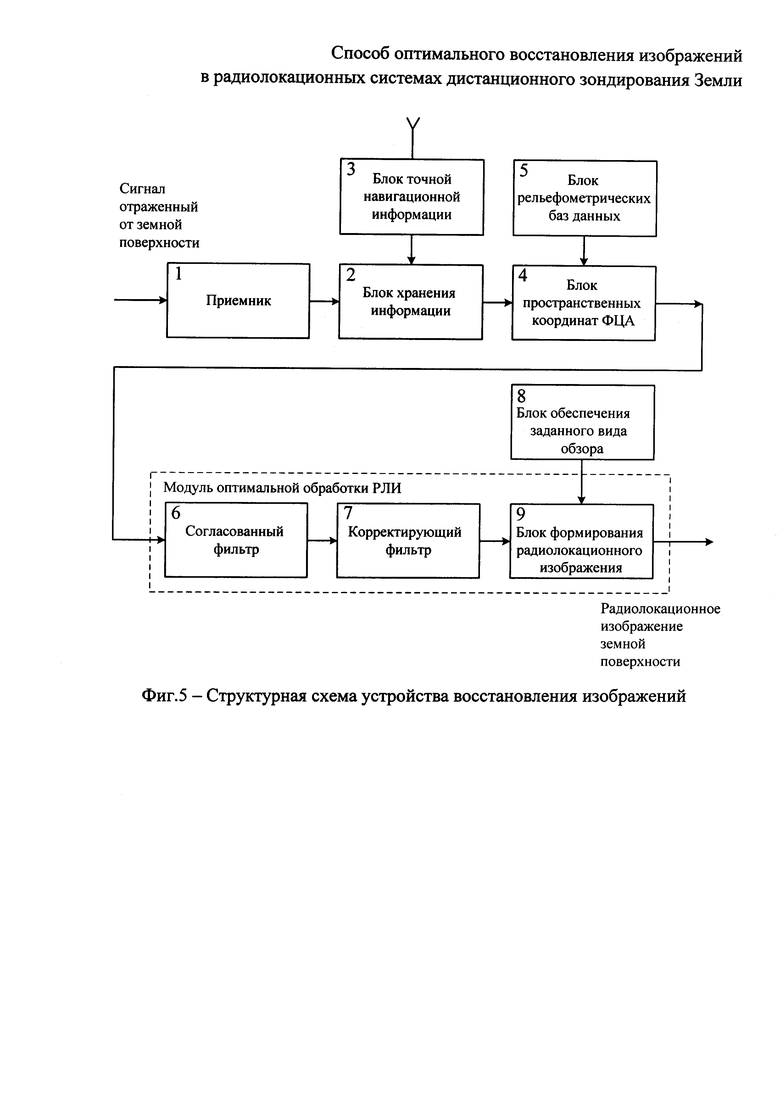
Способ может быть реализован, например, с помощью устройства, структурная схема которого приведена на фиг. 5, где обозначено: 1 - приемник; 2 - блок хранения информации; 3 - блок точной навигационной информации о географических координатах; 4 - блок пространственных координат ФЦА; 5 - блок рельефометрических баз данных; 6 - согласованный фильтр; 7 - корректирующий фильтр; 8 - блок обеспечения заданного вида обзора; 9 - блок формирования радиолокационного изображения.
Приемник 1 предназначен для приема зондирующего сигнала отраженного от земной поверхности. Блок хранения информации 2 предназначен для запоминания сигналов отраженных от земной поверхности и пространственных координат фазового центра антенны (ФЦА) соответствующих принятым сигналам. Данный блок может быть выполнен в виде, например, оперативного запоминающего устройства. Блок точной навигационной информации о географических координатах 3 предназначен для точного определения дальности до земной поверхности, данный блок может быть выполнен в виде, например, приемника сигналов спутниковой навигационной системы ГЛОНАСС. Блок пространственных координат ФЦА 4 предназначен для формирования пространственных координат ФЦА РСА. Блок рельефометрических баз данных 5 позволяет определять высоту над уровнем моря и ориентацию системы зондирования. Согласованный фильтр 6 предназначен для обработки траекторного сигнала в РСА. Корректирующий фильтр 7 предназначен для сужения результирующей аппаратной функции системы и уменьшения систематической ошибки восстановления. Блок обеспечения заданного вида обзора 8 предназначен для выбора режима обзора РСА. Блок формирования радиолокационного изображения 9 обеспечивает восстановление РЛИ в заданном режиме функционирования РСА.
Устройство работает следующим образом: сигнал, отраженный от земной поверхности, принимается антенной системой и поступает в приемник, где детектируется, дешифрируется и преобразуется в цифровой вид. С приемника оцифрованный сигнал поступает в блок хранения информации, где происходит его запоминание вместе с данными о пространственных координатах ФЦА РСА, соответствующими принимаемому сигналу, поступающими с блока точной навигационной информации о географических координатах. С блока хранения информации цифровые данные поступают в блок пространственных координат ФЦА, где происходит определение дальности до земной поверхности в соответствии с данными полученными из блока рельефометрических баз данных. С блока точной навигационной информации об географических координатах данные поступают в модуль оптимальной обработки РЛИ. В модуле оптимальной обработки РЛИ, состоящем из согласованного и корректирующего фильтров, а также блока формирования РЛИ, реализуется оптимальная обработка данных в соответствии с выражениями (20), (21) для заданного блоком обеспечения заданного вида обзора режима.
Применение предложенного способа позволит повысить разрешающую способность восстанавливаемого РЛИ наблюдаемого участка земной поверхности.
Новизна изобретения заключается в новом подходе к процессу формирования изображений в радиолокационных системах дистанционного зондирования Земли, основанном на методе оптимальной обработки случайных полей в отличии от широко распространенного на практике субоптимального метода согласованной фильтрации.
Изобретательский уровень характеризуется применением известного ранее научно-методического аппарата пространственной фильтрации статических случайных полей для решения задачи оптимального восстановления неподвижных изображений в радиолокационных системах дистанционного зондирования Земли в целях повышения разрешающей способности и других качественных показателей системы восстановления РЛИ.
Данное изобретение является промышленно применимым при разработке перспективных и модернизации существующих радиолокационных систем с синтезированной апертурой антенны, предназначенных для дистанционного зондирования Земли.
Источники информации
1. Радиолокационные станции с цифровым синтезированием апертуры антенны / Н.А. Сазонов, Е.Ф. Толстов, А.В. Шаповалов и др.; Под ред. В.Т. Горяинова. - М.: Радио и связь, 1988.
2. Фалькович С.Е., Пономарев В.И., Шкварко Ю.В. Оптимальный прием пространственно-временных сигналов в радиоканалах с рассеянием. - М.: Радио и связь, 1989.-296 с.
3. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для вузов / Под ред. Г.С. Кондратенкова. - М.: Радиотехника, 2005. - 368 с.
4. Левин Б.Р. Теоретические основы статистической радиотехники. М.: Сов. радио. - 1975.
5. Коренной А.В., Егоров С.А., Лепешкин С.А. Модель формирования сигналов в системах активного зондирования // Радиолокация, навигация и связь: Материалы 4-й Международной научно-технической конференции. - Воронеж: ВГУ, 1998. - Т. 2. - С. 1221 - 1231.
6. Потапов А.А. Радиофизическая модель формирования эталонных радиолокационных карт неоднородной местности в диапазоне миллиметровых волн // Электромагнитные волны & электронные системы. - 1997. - Т. 2. - №4. - С. 31-34.
7. Цветков В.Я. Геоинформационные системы и технологии. - М.: Финансы и статистика. - 1998.
8. Коренной А.В., Ершов Л.А. Восстановление неподвижных изображений как задача пространственной фильтрации статических случайных полей // Радиотехника. - 1996. - №7. - С. 74-77.
9. Коренной А.В. Математические модели полутоновых изображений // Радиотехника. - 2007. - №8. - С. 79-81.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования Земли в телескопическом режиме | 2016 |
|
RU2618088C1 |
| СПОСОБ РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗА ОБЪЕКТА НА РАДИОЛОКАЦИОННОМ ИЗОБРАЖЕНИИ | 2012 |
|
RU2516000C2 |
| СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ | 2014 |
|
RU2562614C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2578126C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ С ПРЕДВАРИТЕЛЬНОЙ ФОКУСИРОВКОЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2792964C2 |
| СПОСОБ ФОРМИРОВАНИЯ ДЕТАЛЬНЫХ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2018 |
|
RU2710961C1 |
| Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании и инверсном синтезе апертуры с итерационным уточнением расстояния от эквивалентного фазового центра антенны до точки синтезирования | 2016 |
|
RU2628997C1 |
| СПОСОБ ОБРАБОТКИ РАДИОЛОКАЦИОННОГО СИГНАЛА ИМПУЛЬСНОГО КОГЕРЕНТНОГО РАДИОЛОКАТОРА БОКОВОГО ОБЗОРА | 2002 |
|
RU2229728C1 |
| СПОСОБ ПОСТРОЕНИЯ ДВУМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПРЯМОЛИНЕЙНО ЛЕТЯЩЕЙ ЦЕЛИ ПРИ МНОГОЧАСТОТНОМ УЗКОПОЛОСНОМ ЗОНДИРОВАНИИ | 1995 |
|
RU2099743C1 |

Изобретение относится к области радиотехники и может быть использовано в радиолокационных системах дистанционного зондирования Земли. Техническим результатом изобретения является повышение разрешающей способности восстанавливаемого радиолокационного изображения наблюдаемого участка земной поверхности. Сущность изобретения заключается в том, что процесс формирования изображений заключается в обработке радиосигналов, отраженных от земной поверхности, при формировании изображений производят дополнительную пространственную фильтрацию данных, поступающих с выхода согласованного приемника, корректирующим фильтром, сужая результирующую аппаратную функцию и, тем самым, уменьшая сглаживание восстанавливаемого радиолокационного изображения, при этом систематическая ошибка восстановления уменьшается. Регуляризация решения с помощью корректирующего фильтра минимизирует неоднозначность восстановления радиолокационного изображения. 5 ил.
Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования Земли, заключающийся в обработке радиосигналов, отраженных от земной поверхности, отличающийся тем, что при восстановлении изображений производят дополнительную пространственную фильтрацию данных, поступающих с выхода согласованного приемника, корректирующим фильтром, сужая результирующую аппаратную функцию и тем самым уменьшая сглаживание восстанавливаемого радиолокационного изображения, выбором импульсной характеристики которого минимизируют результирующую ошибку воспроизведения.
| Радиовидение | |||
| Радиолокационные системы дистанционного зондирования Земли | |||
| Учебное пособие для ВУЗОВ | |||
| Под ред | |||
| КОНДРАТЕНКОВА Г.С | |||
| Москва, "Радиотехника", 2005, с.135-159 | |||
| СПОСОБ НАБЛЮДЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ И ПОВЕРХНОСТЬЮ НА БАЗЕ БОРТОВОЙ РЛС | 2005 |
|
RU2292060C1 |
| СПОСОБ ДВУХЭТАПНОГО ВОССТАНОВЛЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 2009 |
|
RU2411536C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИОМЕТРИЧЕСКИХ КОНТРАСТОВ ЦЕЛЕЙ И РАДИОМЕТР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285940C2 |
| US 20130106642 A1, 02.05.2013 | |||
| JP 4977806 B2, 18.07.2012 | |||
| US 20140168007 A1, 19.06.2014. | |||

