Изобретение относится к радиолокации, а именно к бортовым радиолокационным системам наблюдения за земной поверхностью на базе доплеровской радиолокационной станции (РЛС) с четырехэлементной антенной решеткой (АР).
Трехмерное изображение участка земной поверхности формируется в виде совокупности пространственных координат элементов отражения земной поверхности в зоне видимости РЛС, определяемой диаграммой направленности антенны (ДНА). Наличие такого изображения позволяет повысить безопасность маловысотных полетов над сложным рельефом местности.
Известен способ измерения координат элементов земной поверхности в бортовой четырехканальной доплеровской РЛС [1], центры приемных элементов которой расположены на плоскости антенны в точках с координатами (xl,y1)=(d,d), (x2,y2)=(-d,d), (x3,y3)=(-d,-d), (х4,у4)=(d,-d), где 2d - базовое расстояние между центрами соседних элементов. Данный способ позволяет получать трехмерное изображение земной поверхности в зоне видимости РЛС, ограниченной шириной узкой (порядка 1° - 3° на уровне 0,5 мощности) круговой диаграммы направленности антенны (ДНА) при радиальной дальности R порядка 1-10 км, характерной для маловысотного полета носителя РЛС. Способ является наиболее близким по технической сути и заключается в следующем.
1. При данном положении линии визирования антенны, соответствующем переднебоковому обзору бортовой РЛС, получают комплексные траекторные сигналы 


2. В каждом i-м элементе дальности со значением Ri сигналы 


3. Из N элементов разрешения по частоте рассматривают только те n элементов (n<<N), на которых амплитуда сигнала 
4. Оценки угловых координат φ - азимута и θ - угла места осуществляют моноимпульсным методом в антенной системе координат. А именно:
4.1) для каждой i, j-й четверки измерений 






4.2) выделяют действительную часть суммарного сигнала 



4.3) находят угловые координаты центра элемента отражения по формулам:
φij=kUφ, θij=kUθ, k=λ/(2πd),
где λ - длина волны;
4.4) вычисляют прямоугольные координаты центров i,j-х элементов отражения земной поверхности для узкой ДНА по формулам:
xij=φijRi, yij=θijRi, zi=Ri.
5. Совокупность координат xi,j, yij, zi, полученных на множестве значений i,j, дает трехмерное изображение земной поверхности по ширине ДНА, которое отображается на экране индикатора пилота летательного аппарата. Однако данный способ обладает следующими недостатками: 1) точность измерения координат моноимпульсным методом ниже, чем точность измерения координат фазовым методом (фазовый метод, например, [2, с. 424]);
2) область обзора РЛС ограничена шириной узкой ДНА порядка 1° - 3°.
Технический результат направлен на формирование трехмерного изображения поверхности в зоне видимости РЛС с устранением указанных недостатков, а именно на повышение точности определения пространственных координат и расширение зоны видимости РЛС.
Технический результат предлагаемого технического решения достигается тем, что способ формирования трехмерного изображения земной поверхности в бортовой четырехканальной доплеровской РЛС заключается в формировании на заданном промежутке времени синтезирования радиолокационного изображения участка земной поверхности в виде совокупности комплексных амплитуд 

xij=kΔψφ, yij=kΔψθ, 
1. Центры приемных элементов антенны располагают на плоскости антенны в точках с координатами (xl,y1)=(d,0), (x2,y2)=(0,d), (x3,y3)=(-d,0), (x4,y4)=(0,-d), где 2d - базовое расстояние между центрами приемных элементов, расположенных на одной оси.
2. При данном положении линии визирования антенны, соответствующем переднебоковому обзору бортовой РЛС, получают комплексные траекторные сигналы
3. Сигналы
4. В каждом i-м элементе дальности со значением Ri сигналы

5. Из N элементов разрешения по частоте рассматривают только те n элементов (n<<N), на которых амплитуда сигнала 
6. Для каждой i,j-й четверки измерений 
6.1) берут аргументы комплексных величин
Δψφ=ψ1-ψ3, Δψθ=ψ2-ψ4;
6.2) для полученных разностей фаз находят оценки угловых координат:
φij=kΔψφ, θij=kΔψθ, k=λ/(4πd).
6.3) оценки угловых координат пересчитывают в пространственные прямоугольные координаты, которые для узкой ДНА вычисляют по формулам:
xij=φijRi, yij=θijRi,
Совокупность координат xij, yij, xij на множестве значений i,j дает трехмерное изображение участка земной поверхности по ширине ДНА.
7. Линию визирования антенны последовательно смещают по азимуту и углу места на ширину ДНА и повторяют операции пп. 2-6. В результате получают трехмерное изображение земной поверхности в расширенной зоне видимости РЛС.
Расчетная часть
Модель временной последовательности 

где U(φj,θj)=ρ(φj,θj)U0 - амплитуда сигнала от j-го отражающего элемента земной поверхности с угловыми координатами φj,θj, соответствующими j-му элементу разрешения по доплеровской частоте с частотой центра fj; ρ - коэффициент отражения, зависящий от φj, θj; U0 - амплитуда зондирующего сигнала; D(φ, θ) - амплитудная характеристика ДНА на излучение и прием, например:

k0 - известный коэффициент (k0=2,78); Δφ и Δθ - ширина ДНА по азимуту и углу места на уровне 0,5 мощности; i - мнимая единица; δq(φ,θ) - запаздывание или опережение по фазе принимаемого отраженного сигнала от элемента с угловыми координатами φ,θ в q-м приемном элементе антенны по сравнению с центром антенны; ξ - составляющая фазы в элементе разрешения дальности: ξ=-4πR/λ+ϕ0+η; ϕ0 - начальная фаза; η - случайная величина, равномерно распределенная на [0,2π] и описывающая неопределенность отражения в элементе дальности (η меняет свое значение по элементам дальности); 

Суммирование в (1) ведется по n элементам разрешения доплеровской частоты, соответствующим n последовательно расположенным элементам отражения земной поверхности в пределах ширины ДНА в данном элементе разрешения дальности R. Отсчет времени tµ ведется с частотой дискретизации fд, обеспечивающей отсутствие "растекания частот" при ДПФ, т.е. для каждой частоты fj выполняется равенство: fj=qfд/N, где q - целое.
Величина δq(φ,θ) определяется как разность расстояний: δq=R-Rq, где R - удаление центра отражающего элемента поверхности с координатами x,y,z от центра антенны; R - удаление центра этого же элемента от центра q-го приемного элемента антенны с известными координатами хq, уq и zq=0. Для практического расчета δq примем допущение. Представим сферический фронт отраженной волны, достигшей центрального элемента антенны, касательной плоскостью (плоским фронтом) с нормальным вектором 



Формула (3) дает линейную зависимость δq от x, у при известном R. Для указанных ранее координат центров приемных элементов антенны

Связь угловых φ,θ и соответственно прямоугольных х,у координат с доплеровской частотой fд получается следующим образом. Для режима доплеровского обужения луча (ДОЛ) имеем [3, с. 22, с. 52]: fд=(2v/λ)cosα, где cosα находится с помощью скалярного произведения двух векторов: 



Уравнение (5) при фиксированных v и fд представляет собой нелинейное уравнение линии доплеровской частоты (изодопы) на дальности R в угловых координатах φ,θ. Или линейное уравнение в прямоугольных координатах x,y,z (при фиксированном R):
(λ/2v)fд=(vxx+vyy+vzz)/R.
В результате ДПФ временные последовательности



j=1, 2, …, n, где δq определены в (4).
Из модели (6) видно, что угловые координаты φ,θ центров отражающих элементов содержатся в амплитудной и фазовой части обрабатываемых сигналов. Причем для измеряемых фаз ψq=(2π/λ)δq+ξ их разности:

где ε1 и ε2 - ошибки измерения разности фаз.
Искомые координаты находятся из (7), если пренебречь ε1 и ε2:

При этом СКО ошибок оценивания φ, θ определится как 
Заметим, что разности фаз, взятые без учета ошибок их измерения:

где Δφ=δl-δ3, Δθ=δ2-δ4, при малых углах φ,θ однозначно определяются величиной Δφ и Δθ. Так, если Δφ меняется в пределах 0≤Δφ≤λ, что соответствует малым углам φ,θ, разность фаз меняется в пределах 0≤Δψφ≤2π или -π≤ψ≤π, и между Δφ и Δψφ устанавливается однозначное соответствие (9). Однако для больших углов φ,θ возникает неоднозначность. Так, если λ<Δφ≤2λ, что соответствует большим углам φ,θ, Δψφ снова меняется в пределах 0≤Δψφ≤2π. То же самое при 2λ<Δφ≤3λ и т.д. Устранение неоднозначности решается алгоритмически и конструктивно за счет введения пятого центрального элемента антенны при несимметричном расположении остальных приемных элементов антенны по осям x и y. При этом образуются грубые и точные каналы [2, с. 424]. Однако для узкой ДНА, характерной для фазированной АР, прием сигналов ведется с направлений однозначного измерения фазы. Также не рассматривается поправка на сферичность фронта волны на указанной дальности R.
Результаты моделирования
Способ-прототип и предлагаемый способ сравнивались в условиях переднебокового обзора математическим моделированием. Скорость летательного аппарата и орт вектора скорости задавались: v=100 м/с, 

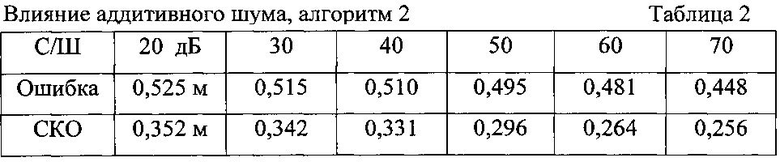
В таблицах 1, 2 показано влияние аддитивного шума 
Видно преимущество алгоритма 2 по точности определения координат. В таблицах 3, 4 показано влияние мультипликативной помехи γq при фиксированном отношении С/Ш=60 дБ. Действие γq моделировалось случайным изменением γq по q-м каналам с отклонением на указанный процент относительно ее среднего значения.
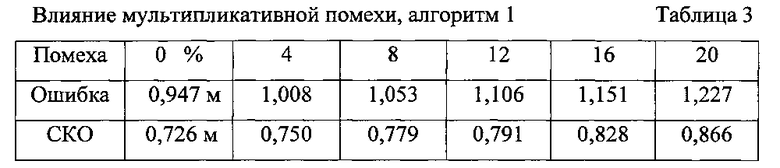
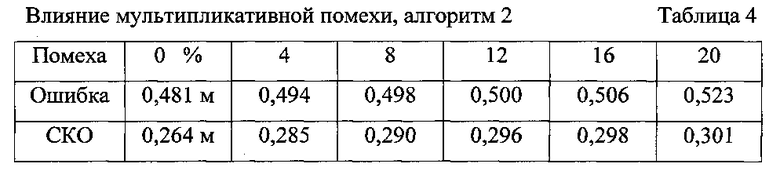
Видно также преимущество алгоритма 2 предложенного способа. Данный способ может найти внедрение в существующих бортовых системах наблюдения за земной поверхностью с целью повышения безопасности маловысотных полетов.
Литература
1. Положительное решение по заявке №2013119344/07(028620).
2. Финкельштейн М.И. Основы радиолокации: Учебник для вузов. М.: Радио и связь, 1983. 536 с.
3. Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли: Учебное пособие для вузов / Под ред. Г.С. Кондратенкова, М.: Радиотехника, 2005. 368 с.
Изобретение относится к радиолокации, а именно к бортовым радиолокационным системам наблюдения за земной поверхностью на базе доплеровской радиолокационной станции (РЛС) с четырехэлементной антенной решеткой. Достигаемый технический результат - формирование трехмерного изображения поверхности в зоне видимости РЛС в виде совокупности пространственных координат отражающих элементов поверхности с повышенной точностью определения координат и расширением зоны видимости РЛС. Способ формирования трехмерного изображения земной поверхности в бортовой четырехканальной доплеровской РЛС заключается в определении пространственных координат отражающих элементов поверхности, расположенных в элементах разрешения дальности и доплеровской частоты, и основан на совместном применении селекции по доплеровской частоте и фазового метода измерения координат. 4 табл.
Способ формирования трехмерного изображения земной поверхности в бортовой четырехканальной доплеровской РЛС, заключающийся в формировании на заданном промежутке времени синтезирования радиолокационного изображения участка земной поверхности в виде совокупности комплексных амплитуд  сигналов отражения в i-x элементах разрешения дальности Ri (i=1, 2, …, m, где m - число элементов дальности) на j-x частотах (j=1, 2, …, N, где N - число элементов разрешения по частоте) одновременно в четырех измерительных каналах (q=1, 2, 3, 4, где q - номер канала), определении тех j-x частот, на которых амплитуда
сигналов отражения в i-x элементах разрешения дальности Ri (i=1, 2, …, m, где m - число элементов дальности) на j-x частотах (j=1, 2, …, N, где N - число элементов разрешения по частоте) одновременно в четырех измерительных каналах (q=1, 2, 3, 4, где q - номер канала), определении тех j-x частот, на которых амплитуда  сигнала превышает порог обнаружения во всех каналах, и последующей обработке полученных измерений , отличающийся тем, что центры приемных элементов антенны располагают на плоскости антенны в точках с координатами (x1,y1)=(d,0), (x2,y2)=(0,d), (x3,y3)=(-d,0), (x4,y4)=(0,-d) и для каждой i,j-й четверки измерений
сигнала превышает порог обнаружения во всех каналах, и последующей обработке полученных измерений , отличающийся тем, что центры приемных элементов антенны располагают на плоскости антенны в точках с координатами (x1,y1)=(d,0), (x2,y2)=(0,d), (x3,y3)=(-d,0), (x4,y4)=(0,-d) и для каждой i,j-й четверки измерений  , q=1, 2, 3, 4, полученных в q-x каналах первичной обработки, берут аргументы комплексных величин
, q=1, 2, 3, 4, полученных в q-x каналах первичной обработки, берут аргументы комплексных величин  - фазы
- фазы  , q=1, 2, 3, 4, вычисляют разности фаз по азимуту φ и углу места θ: Δψφ=ψ1-ψ3, Δψθ=ψ2-ψ4 и находят прямоугольные координаты точек отражения:
, q=1, 2, 3, 4, вычисляют разности фаз по азимуту φ и углу места θ: Δψφ=ψ1-ψ3, Δψθ=ψ2-ψ4 и находят прямоугольные координаты точек отражения:
xij=kΔψφ, yij=kΔψθ, , k=Riλ/(4πd),
, k=Riλ/(4πd),
λ - длина волны, которые на множестве значений i,j дают трехмерное изображение участка земной поверхности по ширине узкой диаграммы направленности антенны, затем смещают линию визирования антенны последовательно по азимуту и углу места на ширину диаграммы направленности и повторяют указанные операции.
| RU 2013119344 A, 27.10.2014 | |||
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ НЕСКОЛЬКИХ ОБЪЕКТОВ В МНОГОКАНАЛЬНЫХ ДОПЛЕРОВСКИХ РЛС | 2008 |
|
RU2373551C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2009 |
|
RU2423724C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ В ПЕРЕДНЕЙ ЗОНЕ ОБЗОРА БОРТОВОЙ РЛС | 2009 |
|
RU2419109C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ | 2005 |
|
RU2290663C1 |
| WO 2005109034 A1, 17.11.2005 | |||
| US 6166677 A, 26.12.2000 | |||
| US 6563451 B1, 13.05.2003 | |||
| JP 2007078398 A, 29.03.2007. | |||

