Изобретение относится к шарнирным механизмам, преобразующим поступательное движение входного звена - ползуна во вращательное движение выходного звена - кривошипа.
Известен кривошипно-ползунный механизм [1, стр. 108, рис. 4.30], в котором ползун, перемещаясь возвратно-поступательно, принуждает шатун и кривошип к вращательному движению.
Недостатком такого механизма является возможность потери продольной устойчивости шатуна при больших нагрузках, а также наличие так называемых «мертвых» положений, когда кривошип и шатун вытягиваются в одну линию, после чего возможно изменение направления вращения кривошипа.
За прототип заявляемого механизма принимаем известный [2] полный параллелограмм Уатта, (приложение 1 к настоящей заявке), в котором ползун-поршень воздействует на дополнительный шатун, принуждающий к вращению кривошип 8.
Недостатком описанного полного параллелограмма является то обстоятельство, что при применяемых в нем соединениях звеньев он не удовлетворяет условию полной работоспособности. Известно [1, стр. 47 формула (28)], что вполне работоспособным плоский шарнирный механизм является тогда, когда его подвижность W, определяемая по формуле П.Л. Чебышева, равна

где n - число подвижных звеньев,
р5 - число одноподвижных кинематических пар - шарниров.
Согласно (1) полный параллелограмм Уатта, в котором n=8, p5=12 оказывается неподвижным

что требует его принципиального исправления.
Задачей настоящего изобретения является гарантированное обеспечение работоспособности полного параллелограмма Уатта исправлением его в механизм преобразования движения с дополнительным шатуном.
Сущность изобретения заключается в том, что предлагается механизм преобразования движения с дополнительным шатуном, включающий ползун, параллелограммный механизм, шатун и кривошип, при этом между ползуном (l) и шарниром (С) параллелограмма установлен дополнительный шатун.
Предлагаемый механизм преобразования движения с дополнительным шатуном показан на чертеже. Механизм состоит из возвратно-поступательно движущегося ползуна 1, параллелограммного механизма, состоящего из балансира 2, параллельных друг другу шатунов 3 и 4, шатуна 5, параллельного коромыслу 6, шатуна 7, выходного кривошипа 8 и дополнительного шатуна 9, соединяющего через вращательную пару ползун 1 с шарниром С параллелограмма, соединяющим звенья 4 и 5. Буквами на схеме обозначены: А - соединение ползуна со стойкой (неподвижное звено); В - соединение ползуна 1 с дополнительным шатуном; С - соединение дополнительного шатуна 9 с шарниром параллелограмма, имеющим квазипоступательное движение; D - соединение шарнира 3 и 5 с балансиром 2; Е - шарнир, соединяющий шатун 4 параллелограмма с коромыслом 6; F - соединение шатуна 3 с коромыслом 6; G - шарнир соединяющий коромысло 6 с шатуном 7; Н - шарнир соединяющий шатун 7 с выходным кривошипом 8; О1, О2, О3 - опоры механизма на неподвижных стойках.
Введение дополнительного шатуна 9 обеспечивает свободное движение всех звеньев параллелограмма Уатта, что доказывается по формуле (1) равенством W=1, при 9 подвижных звеньях механизма и 13 одноподвижных кинематических пар.
Работает механизм следующим образом, При задании движения ползуну 1 через дополнительный шатун 9, связанный со звеньями 4 и 5, передается движение звеньев на параллелограмм O1DCEFO2 и далее через шатун 7 на кривошип 8.
Источники информации
1. Артоболевский И.И. Теория механизмов и машин. Изд. третье. М., Изд-во «Наука», 1975.
2. Чебышев П.Л. «О параллелограммах». Полное собр. соч. П.Л.Чебышева. Т. IV. Теория механизмов. М.-Л., Изд-во «АН СССР», 1948, с. 238-250.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПОССЕЛЬЕ-ЛИПКИНА С ВЫХОДНЫМ РАБОЧИМ ЗВЕНОМ | 2020 |
|
RU2750344C1 |
| МЕХАНИЗМ ПОСЕЛЬЕ-ЛИПКИНА С КУЛИСНЫМ РЫЧАГОМ | 2013 |
|
RU2527642C1 |
| МЕХАНИЗМ С ПЕРЕКАТЫВАЮЩИМСЯ РЫЧАГОМ | 2012 |
|
RU2514322C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ШАТУНОМ | 2011 |
|
RU2450186C1 |
| ТРЕХЩЕКОВАЯ ДРОБИЛЬНАЯ МАШИНА | 2013 |
|
RU2529918C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ПРЕССА | 2008 |
|
RU2378118C1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ-ДОЗАТОР | 2007 |
|
RU2343424C1 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ СО СДВОЕННЫМ ШАТУНОМ | 2006 |
|
RU2298124C1 |
| ДВУХУРОВНЕВЫЙ МАНИПУЛЯТОР С ЗАМКНУТОЙ КИНЕМАТИЧЕСКОЙ ЦЕПЬЮ | 2013 |
|
RU2532751C2 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПРЕССА | 2001 |
|
RU2201348C1 |
Изобретение относится к шарнирным механизмам, преобразующим поступательное движение входного звена-ползуна во вращательное движение выходного звена-кривошипа. Полный параллелограмм Уатта с дополнительным звеном включает в свой состав ползун, параллелограммный механизм, шатун и кривошип. Между ползуном и шарниром параллелограмма имеется квазилинейное движение, т.к. через шарниры устанавливается дополнительный шатун. Достигается повышение работоспособности устройства. 1 ил. 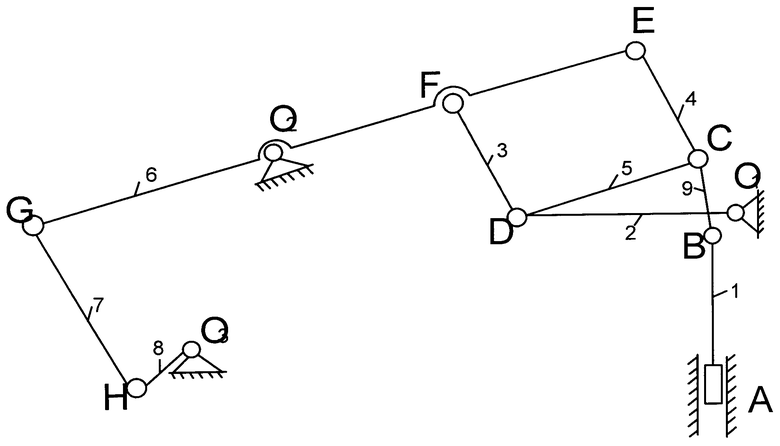
Механизм преобразования движения с дополнительным шатуном, включающий ползун, параллелограммный механизм, шатун и кривошип, отличающийся тем, что между ползуном (l) и шарниром (С) параллелограмма установлен дополнительный шатун.
| Чебышев П.Л | |||
| "О параллелограммах" Полное собрание сочинений П.Л | |||
| Чебышева, том 4 " М-Л.: АН СССР, 1948 | |||
| US 3501120 A, 17.03.1970 | |||
| JP H04311656 A, 04.11.1992 | |||
| US 2005178353 A1, 18.08.2005 |

