Изобретение относится к машиностроению, а конкретно к конструкциям роботов и манипуляторов и предназначено для использования в сфере производства, где требуются к выполнению однообразные, утомительные, физически тяжелые и опасные для человека работы.
В практике робототехники наибольшее применение имеют манипуляторы, построенные на базе незамкнутой кинематической цепи. Такие манипуляторы, на базе незамкнутых кинематических цепей, часто не позволяют достигать требуемого уровня жесткости конструкции, точности позиционирования и склонны к низкочастотным колебаниям.
Хорошо известен робот Sandstrand [1, с.98, табл.9], который имеет пять независимых движений, с использованием электродвигателей. Робот осуществляет следующие движения: поворот башни на 330°, поворот плеча «руки» на 70°, поворот кисти на 360°, изгиб кисти на 105°. Недостатком такого манипулятора является малая грузоподъемность и низкая точность позиционирования.
К механизмам, построенным на базе замкнутой кинематической цепи, относится платформа Стюарта [2, стр.4, рис.1]. Это шестистепенной манипулятор. Свое наименование он получил от платформы, на которой обычно размещается схват. Платформа связана с основанием посредством шарниров и линейных приводов. Его отличительными особенностями являются повышенные жесткость и точность позиционирования. Однако управление таким манипулятором оказывается достаточно сложным.
В качестве прототипа предлагаемого изобретения принимается манипулятор Слуцкого Л.И. [3, табл. на с.13, строка 1, позиция II]. Этот манипулятор представляет собой плоский механизм, включающий в свой состав кривошип, шатун и коромысло, установленные на стойке и образующие между собой вращательные кинематические пары (шарниры), и схват, соединенный через шарнир с шатуном. Недостатком этого манипулятора является малая зона обслуживания, из-за чего уменьшаются его функциональные возможности.
Задачей предлагаемого изобретения является повышение функциональных возможностей манипулятора. Эта задача решается за счет применения замкнутой кинематической цепи, построенной в двух уровнях.
Сущность изобретения заключается в том, что предлагается двухуровневый манипулятор с замкнутой кинематической цепью, содержащий кривошип, шатун и коромысло, являющиеся элементами первого уровня, установленные на неподвижной стойке, и схват, соединенный через шарнир с шатуном, при этом на шатун первого уровня установлены дополнительно три шатуна, соединенные между собой через вращательные кинематические пары и представляющие собой элементы второго уровня, манипулятор снабжен приводом первого уровня, задающим движение коромыслу и установленным на стойке, приводом второго уровня, установленным на шатуне первого уровня, задающим движение шатуну второго уровня, и приводом схвата, при этом схват установлен на одном из шатунов второго уровня.
Кинематическая схема предлагаемого двухуровневого манипулятора приведена на фигуре 1. Двухуровневый манипулятор содержит коромысло 1, шатун 2, коромысло 3, образующие нижний уровень манипулятора O1ACO2, шатуны 4, 5, 6, образующие верхний уровень манипулятора BEFD, и схват 7, соединенный с шатуном 5 через шарнир G.
Работает манипулятор следующим образом. Привод нижнего уровня, установленный на неподвижной стойке, задает движение коромыслу 1, которое совершает качательное движение относительно неподвижного звена - стойки О1О2. Это движение посредством шатуна 2 передается коромыслу 3. Привод верхнего уровня, установленный на шатуне 2 нижнего уровня, задает движение шатуну 4, соединенному шарниром с шатуном 5 и совершающему качательное движение относительно шатуна 2, и далее на шатун 6. Схват 7, соединенный через шарнир с шатуном 5, совершает вращательное движение относительно шатуна 5. При включении в работу приводов нижнего и верхнего уровней схват 7 получает возможность сложного движения в плоскости XOY, занимая все заранее заданные положения в плоскости его функционирования.
Известно, что подвижность любой плоской кинематической цепи определяется формулой Чебышева П.Л. [4, стр.54, формула (3.1)], имеющей вид

где n - число подвижных звеньев,
р - число одноподвижных кинематических пар - шарниров.
В предлагаемом двухуровневом манипуляторе число подвижных звеньев n=7 (звенья 1, 2, 3, 4, 5, 6 и 7), число кинематических пар-шарниров р=9 (шарниры O1, O2, A, B, C, D, E, F, G) и общая подвижность по (1) оказывается равной трем (3·7-2·9=3), откуда следует, что для приведения в движение двухуровневого манипулятора потребно использовать три независимых привода, а именно для задания движений коромыслу 1 нижнего уровня манипулятора, шатуну 4 верхнего уровня манипулятора и схвату G.
Источники информации
1. Козырев Ю.Г. Промышленные роботы: Справочник / Ю.Г. Козырев. - М.: «Машиностроение», 1983. - 375 с.
2. Глазунов В.А. Пространственные механизмы параллельной структуры / В.А. Глазунов, А.Ш. Колискор, А.Ф. Крайнев. - М.; «Наука», 1991. - 95 с.
3. Слуцкий Л.И. Теоретические основы разработки механизмов и систем полуавтоматического управления манипуляционных роботов: автореф. дис.… док. техн. наук / Л.И. Слуцкий, Казахский ордена Трудового Красного Знамени гос. ун-т им. С.М. Кирова. - Алма-Ата, 1987. - 36 с.
4. Артоболевский И.И. Теория Механизмов и машин. - «Наука», Москва, 1975, 64 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ С ПЕРЕКАТЫВАЮЩИМСЯ РЫЧАГОМ | 2012 |
|
RU2514322C1 |
| ПОЛНЫЙ ПАРАЛЛЕЛОГРАММ УАТТА С ДОПОЛНИТЕЛЬНЫМ ШАТУНОМ | 2013 |
|
RU2532109C2 |
| МЕХАНИЗМ ПОСЕЛЬЕ-ЛИПКИНА С КУЛИСНЫМ РЫЧАГОМ | 2013 |
|
RU2527642C1 |
| ТРЕХЩЕКОВАЯ ДРОБИЛЬНАЯ МАШИНА | 2013 |
|
RU2529918C1 |
| ПЛОСКИЙ ДВУХПЛАТФОРМЕННЫЙ МЕХАНИЗМ С ТРЕМЯ ПРИВОДАМИ | 2011 |
|
RU2455148C1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| САМОУСТАНАВЛИВАЮЩИЙСЯ ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2010 |
|
RU2419006C1 |
| ОДНОСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2014 |
|
RU2576215C1 |
Изобретение относится к машиностроению, к конструированию роботов и манипуляторов и предназначено для использования в сфере производства, где требуются к выполнению однообразные, утомительные, физически тяжелые и опасные для человека работы. Двухуровневый манипулятор с замкнутой кинематической цепью содержит кривошип, шатун и коромысло, являющиеся элементами первого уровня, установленные на неподвижной стойке, и схват, соединенный через шарнир с шатуном. На шатун первого уровня установлены дополнительно три шатуна, соединенные между собой через вращательные кинематические пары и представляющие собой элементы второго уровня. Манипулятор снабжен приводом первого уровня, задающим движение коромыслу и установленным на стойке, приводом второго уровня, установленным на шатуне первого уровня, задающим движение шатуну второго уровня, и приводом схвата, при этом схват установлен на одном из шатунов второго уровня. Изобретение позволяет повысить функциональные возможности манипулятора за счет применения замкнутой кинематической цепи, построенной в двух уровнях. 1 ил.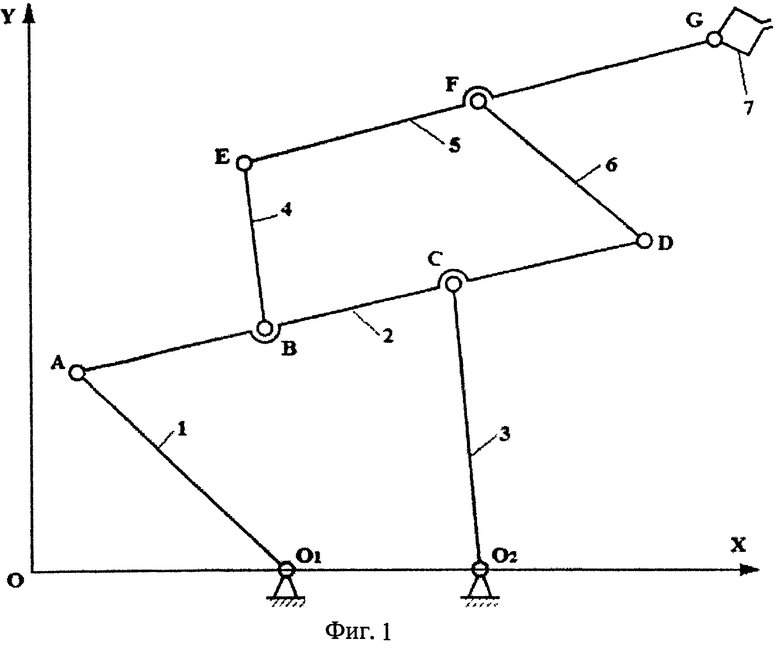
Двухуровневый манипулятор с замкнутой кинематической цепью, содержащий кривошип, шатун и коромысло, являющиеся элементами первого уровня, установленные на неподвижной стойке, и схват, соединенный через шарнир с шатуном, отличающийся тем, что на шатун первого уровня установлены дополнительно три шатуна, соединенные между собой через вращательные кинематические пары и представляющие собой элементы второго уровня, манипулятор снабжен приводом первого уровня, задающим движение коромыслу и установленным на стойке, приводом второго уровня, установленным на шатуне первого уровня, задающим движение шатуну второго уровня, и приводом схвата, при этом схват установлен на одном из шатунов второго уровня.
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО | 2003 |
|
RU2246056C1 |
| Рычажно-зубчатое устройство с остановками | 1984 |
|
SU1227870A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356726C1 |
| Шарнирно-рычажный механизм для преобразования качательного движения во вращательное | 1984 |
|
SU1180601A1 |
| Формирователь сигналов считывания с газоразрядной индикаторной панели | 1986 |
|
SU1478236A1 |
| US 5547064 А, 20.08.1996 | |||

