Предлагаемое изобретение относится к машиностроению, а конкретнее, к плоским рычажным механизмам промышленного применения.
Известен механизм Посcелье-Липкина, воспроизводящий теоретически точное прямолинейное движение центра одного из шарниров. Механизм включает в свой состав четырехзвенный рычажный ромб, в котором крайний шарнир движется прямолинейно (Рузинов Л.Д. Проектирование механизмов точными методами. Изд-во «машиностроение», 1972 г., 192 стр. , с. 15, 2-ой абзац снизу).
Наиболее близким к заявляемому является «механизм Посселье-Липкина с кулисным рычагом», который содержит из четырехзвенный ромб, состоящий из четырех равных по длине шатунов, двух одинаковых по длине коромысел и приводного коромысла, а также содержит дополнительно ползун и кривошип, при этом приводное коромысло входит в поступательную кинематическую пару с ползуном, который через шарнир соединен с кривошипом (RU №2527642 МПК F16H 21/10, опубл. 10.09.2014)
Принципиальным недостатком этого, принятого за прототип, механизма, является то, что к нему не может быть присоединено в шарнир А какое-либо дополнительное звено, которое бы двигалось по траектории точки А.
Это следует из рассмотрения шарнира А. В нем соединяются в кинематическую пару звенья 2 и 3. Отметим, что в этой точке А пересекаются лишь геометрические оси звеньев 2 и 3, то есть эта точка имеет лишь геометрический смысл, реального материального тела здесь не существует, и когда речь заходит о движении этой точки как некоторого объекта, то делается логическая ошибка. Точка А принадлежит одновременно звену 2 и звену 3 - то есть это разные точки и между ними существует относительное движение. Они, как бы, проворачиваются друг относительно друга.
Техническая проблема, решаемая предлагаемым изобретением, заключается в создании механизма, передающего прямолинейное движение на выходное звено, а именно введение между звеньями 2 и 3 дополнительного звена с осью а-а, которое становясь материально существующим подвижным звеном, получает закон движения точки А.
Существующая техническая проблема решается тем, что в известном механизме, включающем четырехзвенный ромб из равных по длине шатунов, коромысла ромба, приводное коромысло, входящее в поступательную кинематическую пару с ползуном, который через шарнир соединен с кривошипом, согласно изобретению, в кинематическую цепь механизма между крайними звеньями ромба введено дополнительное звено, которое соединено с выходным звеном в виде ползуна.
Технический результат, получаемый при использовании изобретения, заключается в том, что введенное в кинематическую цепь механизма между крайними звеньями ромба дополнительное звено приобретает прямолинейное движение и передает его выходному звену в виде ползуна.
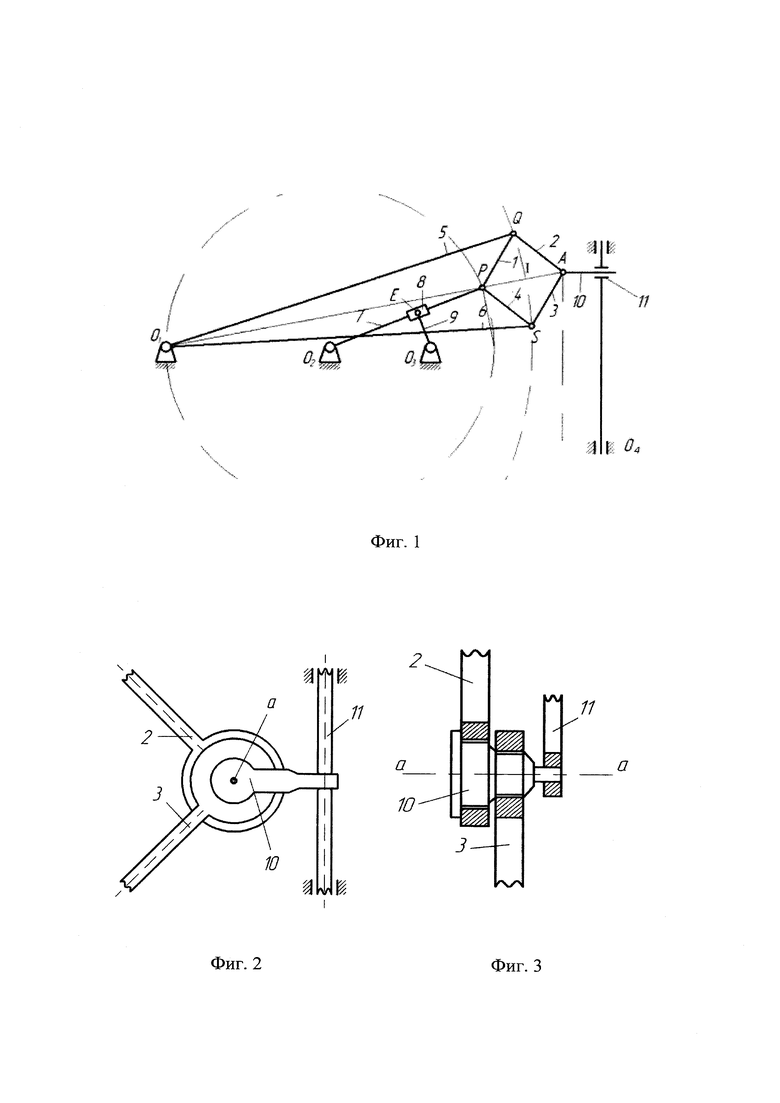
Предлагаемое изобретение иллюстрируется чертежом, где на фиг.1 показан механизм Посселье-Липкина с выходным рабочим звеном; на фиг.2 - сечение по шарниру А, на фиг.3 - разрез по шарниру А.
Механизм содержит четырехзвенный ромб, состоящий из равных по длине шатунов 1, 2, 3, 4, двух одинаковых по длине коромысел 5 и 6, соединенных шарнирно с ромбом, приводного коромысла 7, входящего в поступательную кинематическую пару с ползуном 8, который через шарнир соединен с кривошипом 9. Между крайними звеньями 2 и 3 ромба введено дополнительное звено 10, которое соединено с выходным звеном в виде ползуна 11.
Механизм работает следующим образом:
при задании вращательного движения кривошипу 9, он через ползун 8 принуждает к возвратно-качательному движению приводимое коромысло 7, при этом шарнир А ромба I получает точное прямолинейное возвратно-поступательное движение, передавая его звену 10, соединенному с ползуном 11, который совершает прямолинейное возвратно-поступательное движение.
Известно, что подвижность плоских механизмов определяется формулой Чебышева П.Л. (Артоболевский И.И. Теория механизмов и машин: учебник для вузов: Наука, 1988. - С.46. - формула 2.8):
W=3n-2p5,
где n - число подвижных звеньев,
р5 - число одноподвижных вращательных пар (шарниров),
W - подвижность механизма.
В предлагаемой конструкции число подвижных звеньев n=11 (звенья 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11), число шарниров р5=16 (1-2, 1-5, 2-3, 2-10, 3-4, 3-6, 4-1, 4-7, 5-01, 6-01, 7-02, 9-03, 8-9, 7-8, 10-11, 11-04), что дает результат
W=3*11-2*16=1,
означающий полную работоспособность предлагаемого механизма.
Изобретение относится к области машиностроения. Механизм Посселье-Липкина с выходным рабочим звеном включает четырехзвенный ромб из равных по длине шатунов, коромысла ромба, приводное коромысло, входящее в поступательную кинематическую пару с ползуном, который через шарнир соединен с кривошипом. В кинематическую цепь механизма между крайними звеньями ромба введено дополнительное звено, которое соединено с выходным звеном в виде ползуна. Обеспечивается расширение арсенала технических средств. 3 ил.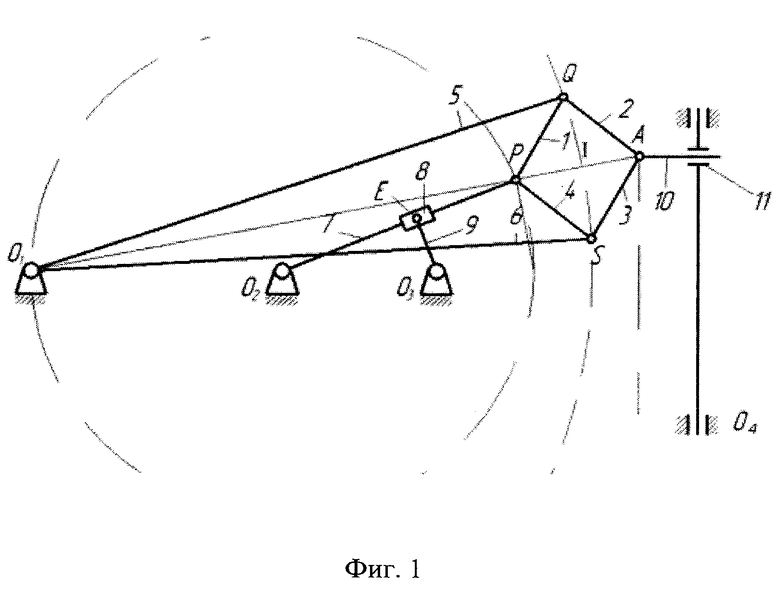
Механизм Посселье-Липкина с выходным рабочим звеном, включающий четырехзвенный ромб из равных по длине шатунов, коромысла ромба, приводное коромысло, входящее в поступательную кинематическую пару с ползуном, который через шарнир соединен с кривошипом, отличающийся тем, что в кинематическую цепь механизма между крайними звеньями ромба введено дополнительное звено, которое соединено с выходным звеном в виде ползуна.
| МЕХАНИЗМ ПОСЕЛЬЕ-ЛИПКИНА С КУЛИСНЫМ РЫЧАГОМ | 2013 |
|
RU2527642C1 |
| Устройство для преобразования возвратно-поступательного движения во вращательное и наоборот | 1984 |
|
SU1262163A1 |
| Шарнирно-рычажный механизм | 1980 |
|
SU983352A1 |
| JP 2009074675 A, 09.04.2009. | |||

