Область техники
Изобретение относится к области часовой промышленности и может быть использовано при производстве механических наручных часов с автоматическим приводом с возможностью получения энергии движения от разности температур различных областей пространства (снаружи/внутри корпуса часов).
Уровень техники
Распространенные в настоящее время механические часы обычно содержат: пружинный двигатель на основе спиральной пружины; механизм завода и перевода стрелок (на языке часовщиков - ремонтуар); спусковой механизм (на языке часовщиков - спуск, ход), преобразующий непрерывное вращательное движение в колебательное или возвратно-поступательное движение; колебательную систему в виде маятника или балансира (баланса); систему зубчатых колес или шестеренок, соединяющую пружинный двигатель и спусковой механизм (на языке часовщиков - ангренаж); стрелочный механизм и циферблат [1].
Пружинный двигатель на основе спиральной пружины, обычно представляет собой прикрепленную к валу спиральную пружину, размещенную в цилиндрическом барабане с зубчатым краем. Раскручиваясь вокруг оси, спиральная пружина вращает барабан (внутри которого она находится), а его зубчатый край через его систему колес, спусковой механизм и регулятор приводит в движение стрелочный механизм. При заводке часов вращением заводной головки через зубчатые передачи вращают соединенный с пружиной вал, на который, сжимаясь, наматывается спиральная пружина [1].
Главным недостатком пружинного двигателя на основе спиральных пружин является неравномерность скорости раскручивания пружины, что приводит к неточности хода часов. Каждая спиральная пружина в ходе своего разматывания изменяет свою приводную силу. Для устранения этого недостатка применяли и применяют различные способы: исключение в работе пружины ее начальную и конечную фазу путем использования кулачковых механизмов, из которых наиболее известны мальтийский механизм, кольцевидные и пальцевые кулачковые механизмы.
Изменчивость приводной силы можно также ограничивать удлинением пружины и увеличением запаса ее энергии. Однако удлинение пружины идет за счет ее толщины, что требует увеличения ее размеров, а для тонких пружин требуются специальные сплавы, лучше выдерживающие нагрузку и усталость, но они дороги и сложны в изготовлении, см., например, [2].
Таким образом, главным недостатком пружинного двигателя на основе спиральных пружин является неравномерность скорости раскручивания спиральной пружины, что приводит к неточности хода часов. Кроме этого, точность хода механических часов зависит еще от множества факторов, таких как температура, положение часов, износ деталей и других. Поэтому для механических часов считается нормой расхождение с точным временем на 15-45 секунд в сутки, а лучшим результатом - 4-5 секунд в сутки.
В настоящее время, например в наручных часах, широко используются механические часы с автоматическим подзаводом пружины (с автоподзаводом). Часы с автоподзаводом более точны, так как энергия пружины в течение дня остается почти постоянной, что приводит к постоянной величине импульса, передаваемого на регулятор-баланс [3].
По своим конструктивным особенностям механизмы автоподзавода различаются, но все известные конструкции имеют инерционный сектор, или подвижный груз, который при вращении часов оборачивается или качается вокруг своей оси и посредством силы тяжести передает пружине двигателя дополнительную энергию. Инерционный сектор обычно имеет достаточно большой вес, для того чтобы преодолеть силу сопротивления заводной пружины, поэтому и его крепление к механизму часов должно быть достаточно прочным и надежным.
В известных часах с исправным автоподзаводом пружина должна подзаводиться при повороте инерционного сектора в любую сторону. Если пружина заводится только при повороте инерционного сектора в одну сторону, это приводит к тому, что пружина не полностью подзаводится и часы останавливаются. Сектор автоподзавода наручных часов при этом вращается при любых движениях руки человека, независимо от того, насколько заведена пружина часов. Для того чтобы пружина не порвалась от чрезмерного перенапряжения, она обычно имеет фрикционное крепление к барабану, посредством которого, достигнув максимального значения, пружина проскальзывает в барабане на два-три оборота, что дает возможность автоподзаводу постоянно работать и избегать его поломки.
Часы с автоподзаводом обычно имеют закрепленный на оси металлический груз, обычно выполненный в форме сектора. Центр тяжести сектора смещен к краю, и при любых движениях руки он поворачивается вокруг оси, заводя через систему шестерен пружину часов. Чтобы сектор мог преодолеть сопротивление пружины и завести часы, он должен обладать большой инерцией. Поэтому сектор обычно изготавливают из двух частей: тонкой легкой верхней пластины и полукольца из тяжелого вольфрамового сплава. Диаметр сектора стараются сделать максимально возможным.
Считается, что для полного автоматического завода пружины часы с автоподзаводом необходимо носить с движениями около 8 часов.
Основное достоинство часов с автоподзаводом состоит в том, что их не надо ежедневно заводить. При этом сектор постоянно поддерживает пружину в напряженном состоянии, близком к полному заводу, что позволяет достичь лучшей точности. Второе преимущество связано с водонепроницаемостью. Втулка заводной головки - одно из самых уязвимых мест в часах в плане водозащиты. В часах с автоподзаводом выше водонепроницаемость, т.к. заводная головка почти не используется, а значит, у влаги и грязи меньше шансов попасть внутрь.
Недостатками механизмов автоподзавода являются значительный вес, конструктивная сложность и повышенная вероятность поломок. Известные часы с автоподзаводом толще и тяжелее обычных. Потребность в секторе большого размера ограничивает применение автоподзавода в женских часах. Усложнение механизма и использование груза из довольно дорогого вольфрама увеличивают стоимость часов. Кроме этого, известные часы с автоподзаводом очень чувствительны к ударам. Бывает, что при сильных ударах под тяжестью грузового сектора ломаются его опоры.
Также известны механизмы автоподзавода («автоматического» завода), в котором качающийся неуравновешенный груз (грузовой сектор) осуществляет закручивание (завод) пружины пружинного двигателя, в которых неуравновешенный груз (ротор) жестко соединен с трибом и свободно движется на оси в обоих направлениях или в которых триб постоянно сцеплен с зубчатым колесом обгонной муфты. В зависимости от направления вращения грузового сектора зубчатое колесо получает вращение в одном и том же направлении и при этом происходит подкручивание пружины [4].
Известен механизм автоподзавода в виде инерционной массы, перемещающейся при изменении часов, отличающийся тем, что с целью возможности использования автоподзавода в сочетании с любым базовым элементом без его утолщения применено тяжелое полукольцо, размещенное по периметру механизма внутри корпусного кольца и удерживаемое в названном кольце с помощью трех роликов. При этом для передачи вращения груза на заводной вал пружины инерционный груз снабжен кольцом, внутренняя поверхность которого выполнена рифленой для взаимодействия с роликом, установленным на конце рычага, снабженного собачкой для перемещения храповика на заводном валу [5].
Известные механизмы автоподзавода могут быть использованы только в переносных часах, например наручных часах, в которых по условиям эксплуатации возможно возникновение качательного движения ротора. Кроме этого, основным недостатков всех известных механических часов с автоподзаводом для правильной работы механизма автоподзавода является необходимость активного подвижного образа жизни пользователя часов.
Известны настольные часы Атмос с крутильным маятником, выпускаемые фирмой «Jaeger-le Coultre» (Швейцария) и работающие от изменения во времени температуры и атмосферного давления [6].
Источником энергии, поддерживающим колебания маятника в данных часах, служит перепад температуры окружающей среды воздуха в квартире или служебном помещении. Перепад температур в 1°С обеспечивает функционирование часов в течение 2 суток. Часы функционируют с высокой степенью точности порядка 1 с в сутки. При отсутствии колебаний температуры окружающего воздуха в течение 2 суток (что маловероятно) часы автономно функционируют в течение 100 суток за счет запаса энергии заводной пружины, заключенной в барабане.
Колебания температуры служат энергией подзавода пружины, которая работает в коротком интервале пологой кривой момента, обеспечивая тем самым высокую стабильность амплитуды колебаний и высокую степень точности хода.
Для использования колебания температуры воздуха на подзавод пружины используют особое химическое вещество C2H5Cl - хлористый этил. Пары хлористого этила создают давление, равное примерно атмосферному при температуре +12°C, при температуре +27°C давление паров максимальное, т.е. часы работают в широком диапазоне температур.
Хлористый этил помещают в герметический металлический корпус, имеющий форму короткого цилиндра. Хлористый этил заполняет внутренние кольцевые выступы в корпусе. При повышении температуры пары этила расширяются и давят на кольцевые выступы. Последние расширяются подобно мехам. Движение кольцевых выступов передается цепочке, которая одним концом прикреплена к пружине, а другим - к храповому устройству, осуществляющему непосредственно подзавод пружины в барабане.
При понижении температуры происходит сжатие кольцевых выступов. За счет разности температур и перемещения в ту или другую сторону кольцевых выступов, а вместе с ними пружины и цепочки, происходит подзавод пружины в барабане.
Для регулирования периода колебания маятника имеется головка, полный оборот которой соответствует изменению периода колебаний на 10 с в сутки. Часы регулируются с точностью 1 с в сутки. Часы работают только в стационарном положении, чувствительны к вибрациям. Они снабжены водяным уровнем и тремя установочными стойками, из которых одна неподвижна, а две другие регулируются по высоте. Для переноски часов маятник блокируется специальным устройством.
Недостатком этих часов, в частности его механизма автоматического привода, является то, что эти часы работают только в стационарном положении, т.к. не допускается использования часов в качестве переносных. Так как энергия, получаемая от изменения давления и температуры по времени очень мала, то в результате очень большого периода колебаний - под влиянием внешних воздействий - как правило, они имеют очень сложную систему регулировки для обеспечения высокой точности хода. Кроме того, они требуют кропотливой и точной регулировки для обеспечения строго перпендикулярного плоскости Земли положения крутильного маятника.
Также из уровня техники известны часы, разработанные автором настоящей заявки Константином Чайкиным [7]. Часы содержат устройство для автоматического приведения в движение подвижных элементов часового механизма, которое содержит тепловой двигатель, выполненный с возможностью преобразования разницы температур в двух разных точках пространства либо на поверхностях, либо на поверхности и пространстве в движение часового механизма. При этом тепловой двигатель выполнен в виде теплового двигателя Стирлинга-гамма типа, роторного типа или свободно-поршневого типа.
В основе конструкции двигательной установки Стирлинга лежат принцип разделения горячей и холодной рабочих полостей и способ, с помощью которого рабочее тело направляется из одной полости в другую. Тепловой двигатель Стирлинга представляет собой механизм преобразования разницы температур в энергию механического движения, в частном случае во вращение маховика или выходного вала, сопряженного с передаточным механизмом. Передаточный механизм преобразует движение (вращательное, возвратно-поступательное), поступающее с двигателя Стирлинга, во вращение заводного вала или вала барабана часов, также как и известные механизмы автоподзавода часов. Все остальные элементы кинематической схемы выполняют те же функции, как в обычном часовом механизме. Тепловой двигатель Стирлинга представляет собой тепловую машину, в которой жидкое или газообразное рабочее тело движется в замкнутом объеме. Принцип его действия основан на периодическом нагреве и охлаждении рабочего тела с извлечением энергии из возникающего при этом изменения объема рабочего тела. Может работать не только от сжигания топлива, но и практически от любого источника тепла [8]. В моделях двигателей Стирлинга, где теплообменный цилиндр не имеет качественного нагревателя, рабочее тело разогревается не полностью, но поскольку давление в газах распространяется равномерно во все стороны, его изменение оказывает действие и на рабочий поршень, заставляя его двигаться и совершать работу.
Основным недостатком этих часов является то, что рабочий градиент температур низкотемпературного двигателя Стирлинга составляет 3-10 градуса Цельсия. Этой разницы достаточно трудно достичь при обычных условиях в повседневной жизни. Кроме того, недостатком является то, что теплообменник двигателя Стирлинга для обеспечения нормальной работы занимает большой объем в корпусе, также недостатком является отсутствие самозапуска двигателя в большинстве типов конструкций. Еще одним недостатком часов с двигателем Стирлинга является высокое требование к обеспечению герметичности теплообменника двигателя, вследствие чего возрастает себестоимость изделия.
Наиболее близким аналогом заявленного изобретения является решение, раскрытое в патенте [9]. Заявленный в нем механизм отличается от предыдущих конструкций автоподзавода часов и фокусировки пружины тем, что в нем используется источник энергии, который обеспечивает бесконечную автономную работу часового механизма. В часах используется улучшенный источник энергии, который реагирует на изменения температуры для осуществления автоподзавода. В качестве такого источника энергии используется чувствительная к температуре биметаллическая катушка, которая при расширении и сжатии вращает механизм заводного вала. При этом биметаллическая катушка закреплена одним концом к неподвижному носителю катушки, а вторым концом - к орбитальной шестерне. При этом за счет смещения биметаллической катушки при температурном изменении происходит постоянная передача полученной энергии на главную пружину завода и осуществляется постоянный ее подзавод.
Недостатком прототипа является то, что получение полезной работы в прототипе возможно только при изменении внешней температуры во времени, что, как правило, дает очень небольшую полезную работу. Например, в текущий момент времени температура составляет 20 градусов Цельсия, а через несколько часов температура будет 25 градусов Цельсия. То есть полезная работа в среднем будет минимальная. Кроме этого, необходимо учесть и разность температуры в разных точках пространства. Если устройство прототипа относительно этих точек находится неподвижно - полезная работа отсутствует.
Задача и технический результат
Задача предлагаемого изобретения состоит в разработке и практической реализации простых в изготовлении часов с термочувствительным приводом. Суть изобретения состоит в разработке конструкции, позволяющей подзаводить двигатель часового механизма за счет обеспечения возможности попеременного перемещения термочувствительного элемента из холодной области в горячую, что обеспечивает изменение геометрии этого элемента, которое приводит к получению энергии, достаточной для перемещения этого элемента, плюс к получению дополнительной полезной энергии, которая используется для подзавода часового механизма.
По отношению к прототипу техническим результатом является значительное увеличение (на порядки!) эффективности подзавода двигателя часового механизма вследствие самообеспечения устройством попеременного изменения температуры относительно термочувствительного элемента, в то время как в прототипе изменение температуры происходит вследствие внешних факторов и зависит от этих факторов.
Раскрытие изобретения
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что термочувствительный привод часового механизма содержащий, по меньшей мере, один термочувствительный модуль, в свою очередь, содержащий термочувствительный элемент, и средство преобразования движения термочувствительного элемента в движение механизма подзавода, дополнительно содержит средство перемещения термочувствительного модуля, скорость которого задается часовым механизмом, при этом термочувствительный привод имеет, по меньшей мере, одну зону охлаждения и, по меньшей мере, одну зону нагревания.
При этом термочувствительный элемент выполнен в виде термобиметаллической спирали.
А средство преобразования движения термочувствительного элемента в движение механизма подзавода совершает либо вращательное, либо возвратно-поступательное движение.
Для совершения вращательного движения средство преобразования движения выполнено в виде стойки крепления внешнего витка спирали, стойки крепления внутреннего витка спирали, храпового колеса, расположенного соосно с колесом термочувствительного модуля, на котором закреплена собачка, подпружиненная пружиной, также расположенной на колесе термочувствительного модуля.
Кроме этого, термочувствительный привод дополнительно содержит центральное колесо для передачи вращения от термочувствительного привода к механизму подзавода двигателя часов.
Для совершения возвратно-поступательного движения средство преобразования движения выполнено в виде прямого отрезка, соединенного с зубчатой рейкой, зубья которой передают движение на храповое колесо подзавода.
При этом в качестве средства перемещения модуля используют водило.
При этом водило имеет ось вращения.
Кроме этого, водило имеет поперечные мосты, на которых расположены термочувствительные модули.
При этом количество термочувствительных модулей соответствует количеству зон охлаждения и нагрева.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что часовой механизм, содержащий механический аккумулятор, зубчатую передачу, спусковой регулятор, осциллятор, стрелочный механизм, дополнительно содержит вышеуказанный термочувствительный привод.
При этом часовой механизм содержит механизм завода и перевода стрелок.
Кроме этого, часовой механизм содержит передаточный механизм и механизм подзавода.
При этом механизм подзавода предназначен для передачи движения от термочувствительного привода двигателю часового механизма.
Кроме этого, механизм подзавода содержит триб, на который передается движение от центрального колеса термочувствительного привода, соосно закрепленные на трибе храповик, собачку, пружину, которая обеспечивает одностороннее движение механизма подзавода, и барабанное колесо.
При этом передаточный механизм предназначен для передачи движения от часового механизма к средству перемещения термочувствительного модуля.
При этом передаточный механизм приводится в движение колесной системой часового механизма.
При этом передаточный механизм выполнен в виде мальтийского механизма, содержащего кулачок, штифт и мальтийский крест.
При этом мальтийский механизм приводит в движение средство преобразования движения термочувствительного элемента в движение механизма подзавода.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что часы, имеющие корпус и средство индикации, также содержат вышеуказанный часовой механизм.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что в способе автоматического подзавода часового механизма осуществляют непрерывный подзавод пружинного двигателя часового механизма при помощи вышеуказанного термочувствительного привода.
Краткое описание чертежей
Сущность изобретения поясняется чертежами.
На чертежах показаны варианты конструктивного исполнения устройства, представляющего собой часы с термочувствительным элементом.
Для простоты объяснения конструкции и принципа работы изобретения, представляющего собой часы с термочувствительным приводом, на чертежах изображены следующие элементы конструкции:
1 - часовой корпус,
2 - заводная головка
3 - циферблат
4 - часовая стрелка
5 - минутная стрелка
6 - ремешок
7 - стекло
8 - рука
9 - первый металл
10 - второй металл
11 - биметаллическая спираль
12 - стойка крепления внешнего витка спирали
13 - стойка крепления внутреннего витка спирали
14 - пружина собачки термочувствительного модуля
15 - колесо термочувствительного модуля
16 - храповик термочувствительного модуля
17 - собачка термочувствительного модуля
18 - термочувствительный модуль
19 - центральное колесо привода
20 - зона охлаждения
21 - зона нагревания
22 - водило привода
23 - триб подзавода
24 - храповик подзавода
25 - собачка подзавода
26 - пружина собачки подзавода
27 - барабанное колесо
28 - барабан
29 - заводная пружина
30 - вал барабана
31 - центральное колесо
32 - промежуточное колесо
33 - секундное колесо
34 - анкерная вилка
35 - анкерное колесо
36 - баланс-спираль
37 - кулачок мальтийского механизма
38 - штифт мальтийского механизма
39 - мальтийский крест
40 - часовой механизм с механизмом подзавода и скачковым механизмом
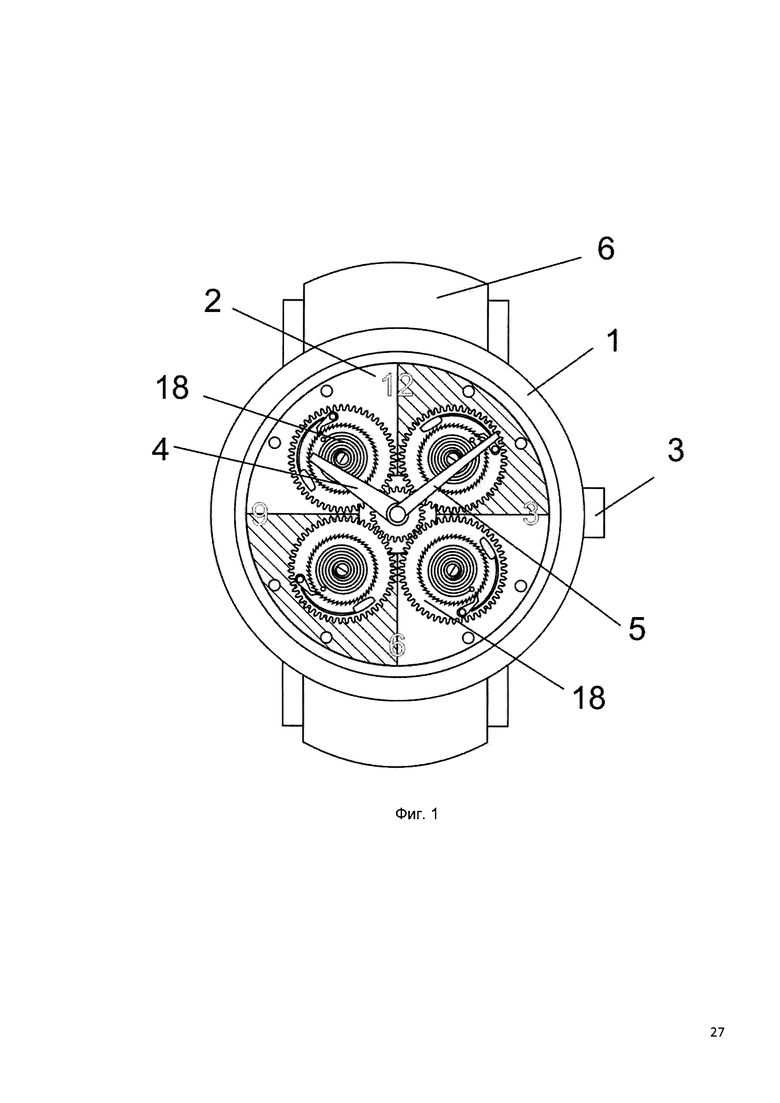
На фиг. 1 показан внешний вид часов с термочувствительным приводом, на котором показаны корпус 1, циферблат 2, заводная головка 3, часовая стрелка 4, минутная стрелка 5, ремешок часов 6, термочувствительный модуль 18, на этом виде часы содержат четыре термочувствительных модуля для обеспечения высокой эффективности работы термочувствительного привода.
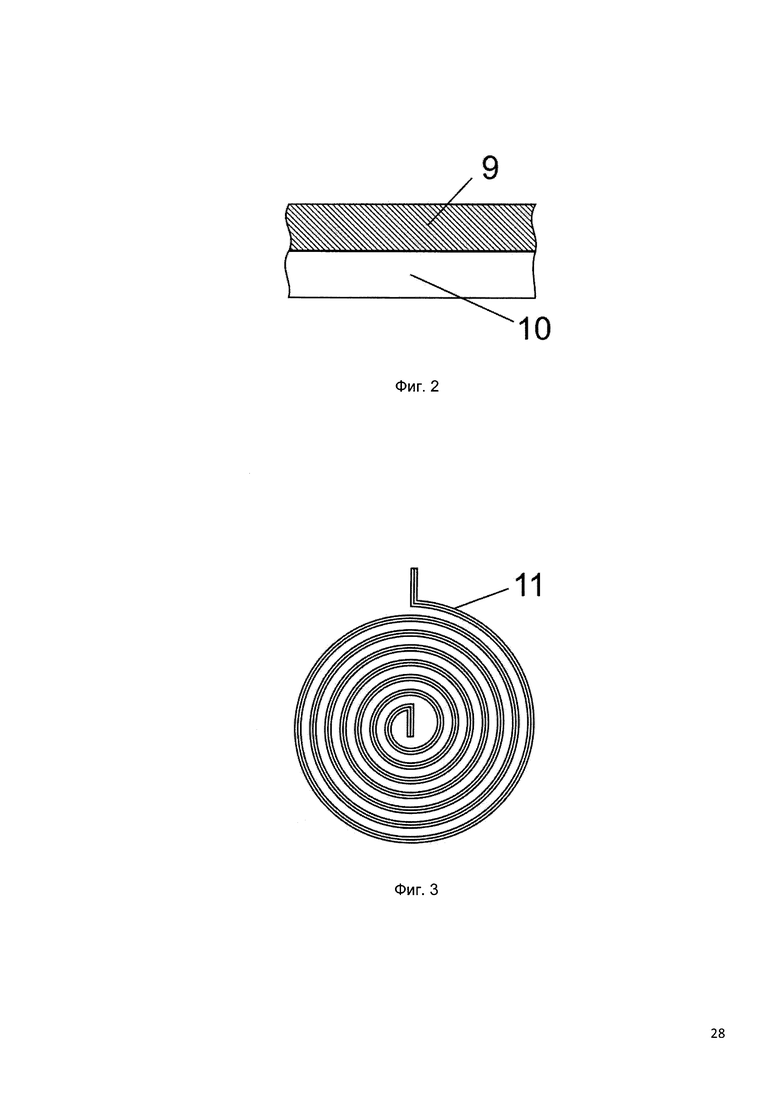
На фиг. 2 показано сечение термочувствительного элемента биметаллической ленты-спирали, на которой показано исполнение пластины, спаянной из двух металлов с разным коэффициентом температурного расширения, металлической ленты 9 и металлической ленты 10.
На фиг. 3 показан термочувствительный элемент, выполненный в виде биметаллической спирали.
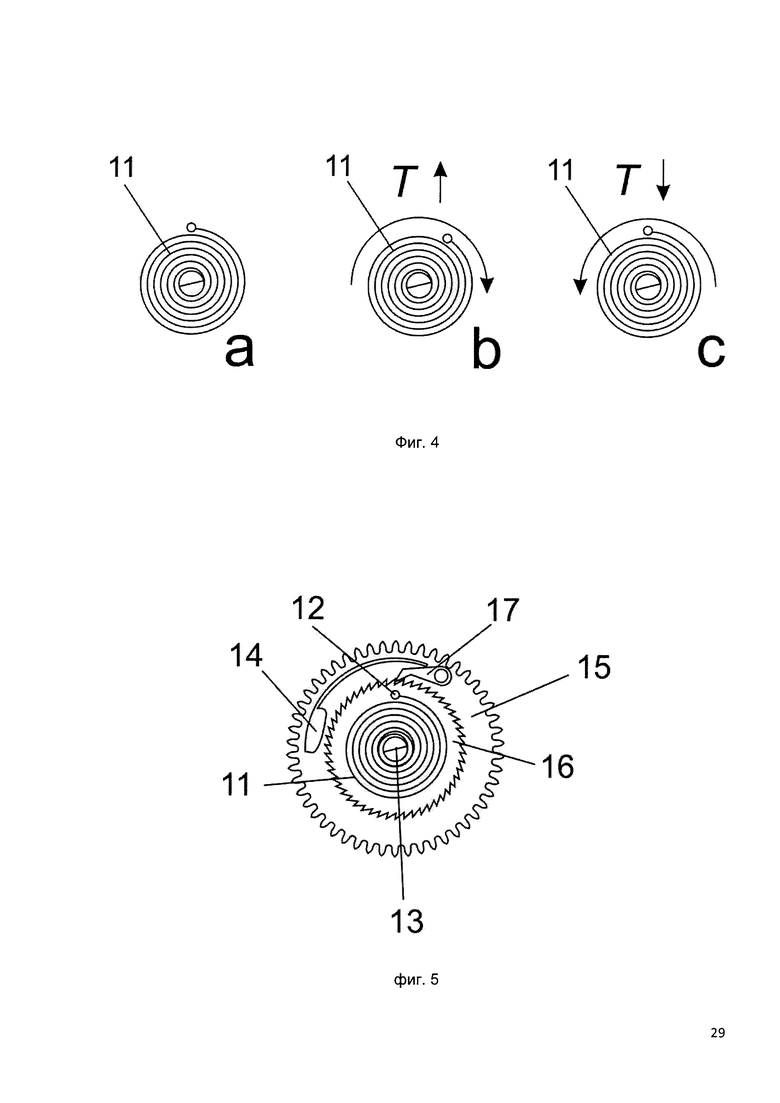
На фиг 4 показано изменение геометрии биметаллической спирали 11 при изменении температуры:
вар. а - спираль находится при стабильной первоначальной температуре;
вар. b - спираль изменяет свою геометрию при нагревании, при этом она разворачивается;
вар. с - спираль остывает, возвращаясь к первоначальной температуре - сворачивается.
На фиг. 5 показан вариант исполнения термочувствительного модуля, который представляет собой термочувствительный элемент в виде биметаллической спирали 11, закрепленной внутренним концом на стойке крепления 13, а внешним концом - на стойке 12, которая жестко закреплена на храповом колесе 16. Храповое колесо 16 расположено соосно с колесом 15. На колесе 15 закреплена собачка 17, которая подпружинена пружиной 14, расположенной также на колесе 15.
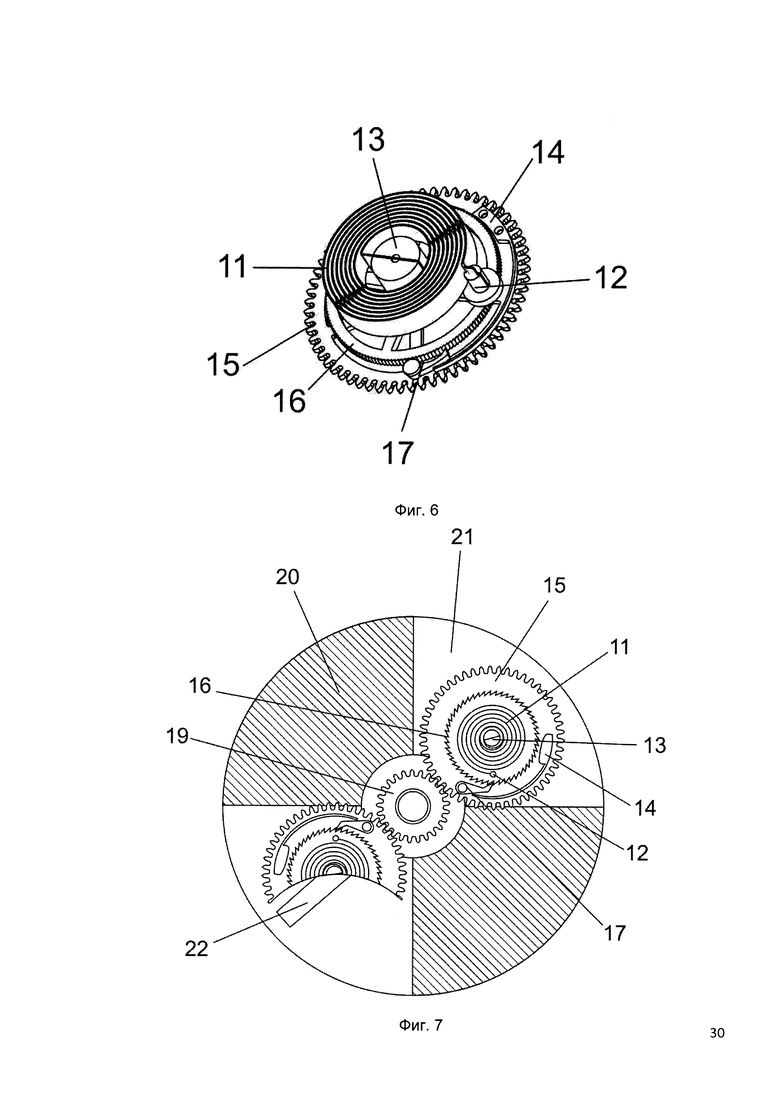
На фиг. 6 показан термочувствительный модуль в аксонометрической проекции.
На фиг. 7 показан вариант исполнения термочувствительного привода, содержащего два термочувствительных модуля, расположенных на водиле 22. При изменении температуры движение, получаемое от термочувствительного элемента 11, передается через жестко закрепленную стойку внешнего витка 12 на храповик 16, который, в свою очередь, толкает своими зубьями собачку 17, расположенную на колесе 15, поворачивая таким образом колесо 15. При этом стойка крепления внутреннего витка 13 жестко закреплена на водиле 22, а колесо 15 и храповик 16 выполнены с возможностью свободного вращения относительно друг друга. Движение от колеса 15 передается центральному колесу 19, которое, в свою очередь, передает вращение на механизм подзавода.
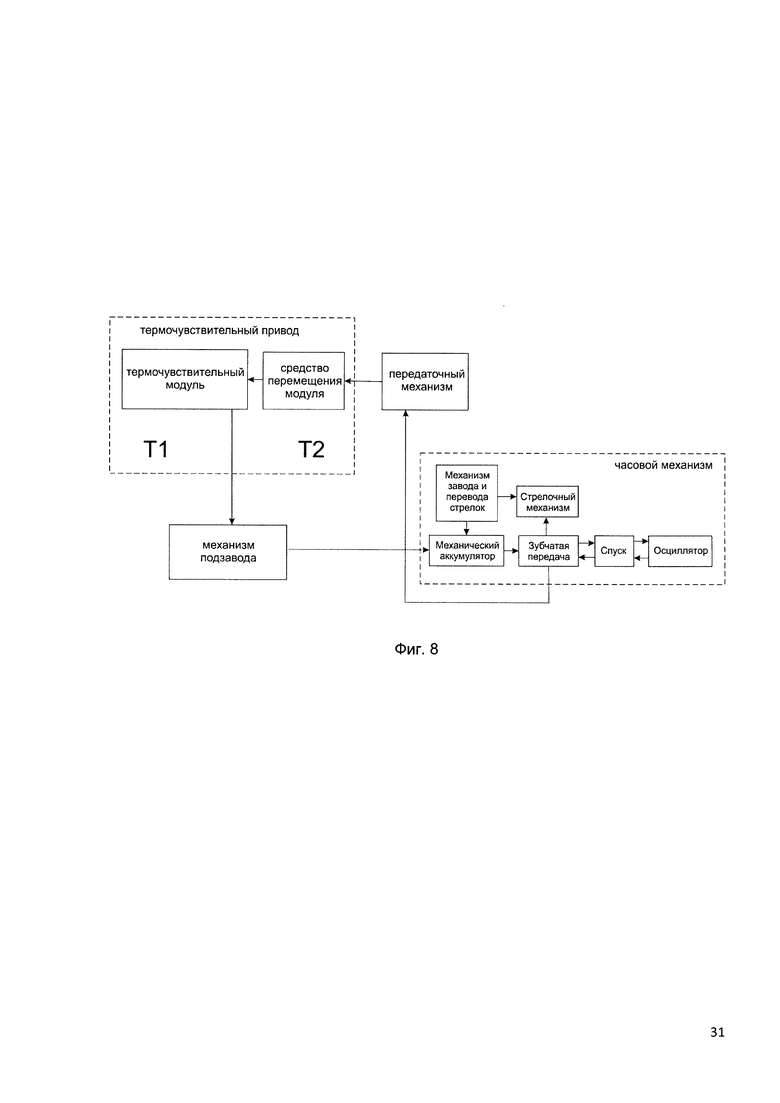
На фиг. 8 показана структурно-функциональная схема механизма с термочувствительным элементом, на которой блоками показаны термочувствительный привод, включающий в себя термочувствительный модуль и средство перемещения модуля, которое перемещает в приводе ТЧМ попеременно от области с более высокой температурой к области с более низкой. Также указан часовой механизм со своими стандартными блоками, такими как механический аккумулятор, зубчатая передача, спуск, осциллятор, стрелочный механизм и механизм завода и перевода стрелок, а также передаточный механизм.
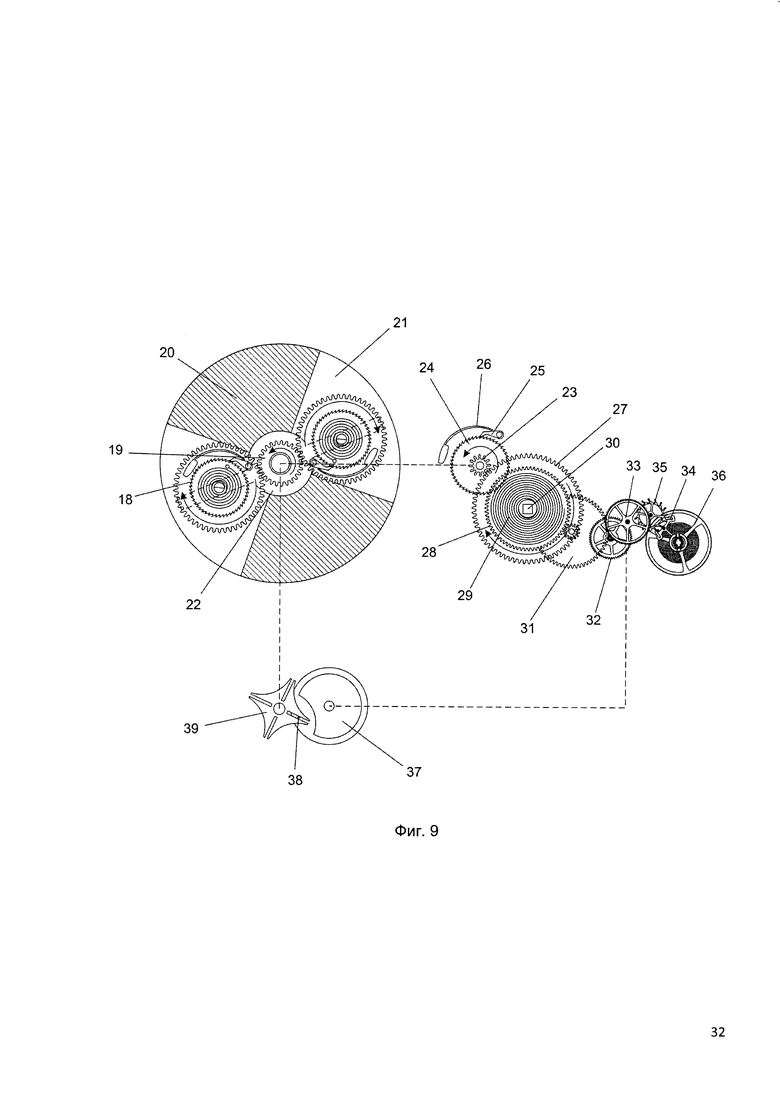
На фиг. 9 показан вариант кинематической схемы механизма часов с термочувствительным приводом, на которой показаны термочувствительный привод, состоящий из зон 20 и 21, одна из которых охлаждает, с более низкой температурой, а вторая нагревает, с более высокой температурой. Термочувствительный элемент 11 при нагревании приводит в движение колеса термочувствительного модуля 18 которые передают движение через центральное колесо 19 механизму подзавода состоящего из храповика 24, собачки 25 и пружины собачки 26, а также редуктора состоящего из триба 23 и колеса 27. Часовой механизм состоит из пружинного двигателя - барабана 28, с пружиной 29, заводного вала 30, центрального колеса 31, промежуточного колеса 32, секундного колеса 33, анкерного колеса 35, анкерной вилки 34 и осциллятора баланс-спираль 36. В данном варианте секундное колесо приводит в движение передаточный механизм, который в данном варианте выполнен в виде мальтийского механизма состоящего из кулачка 37, штифта 38 и мальтийского креста 39, от которого движение передается на водило 22 термочувствительного привода.
На фиг. 10-14 показана работа термочувствительного привода в разных рабочих фазах.
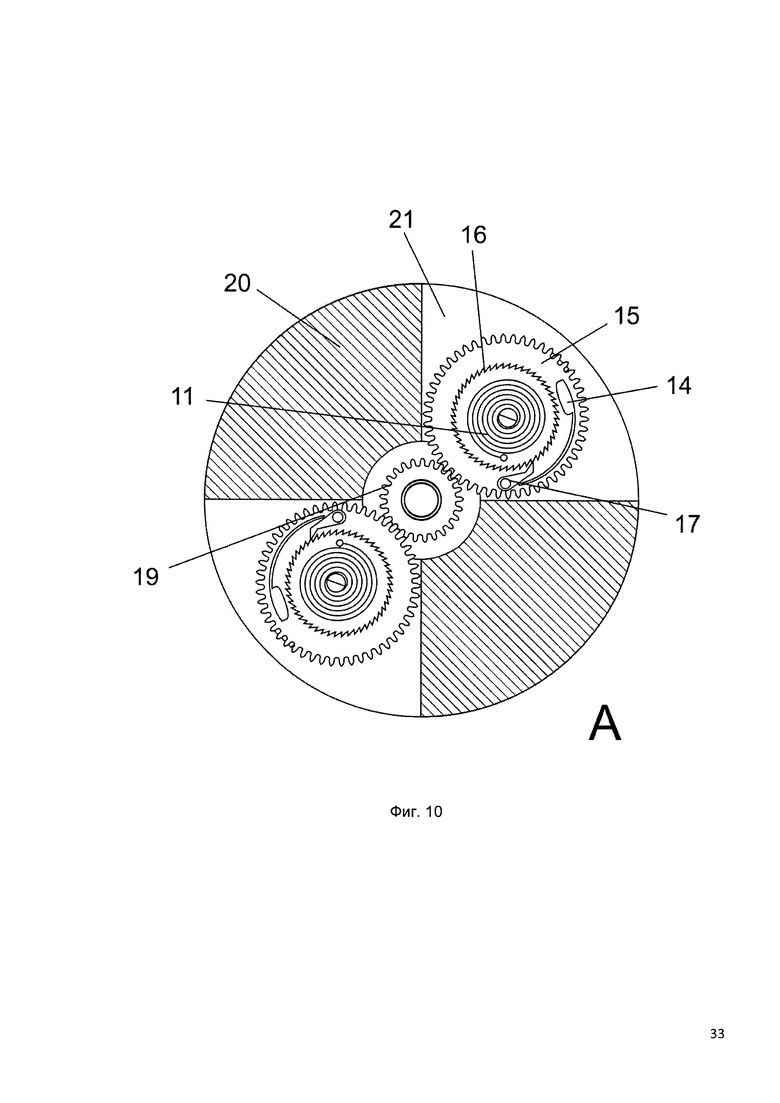
На фиг. 10 отображено положение термочувствительного привода, где термочувствительные модули только что были перемещены в положение над областью нагрева 21 и термочувствительный элемент 11 находится в положении, где спираль свернута и еще не успела нагреться.
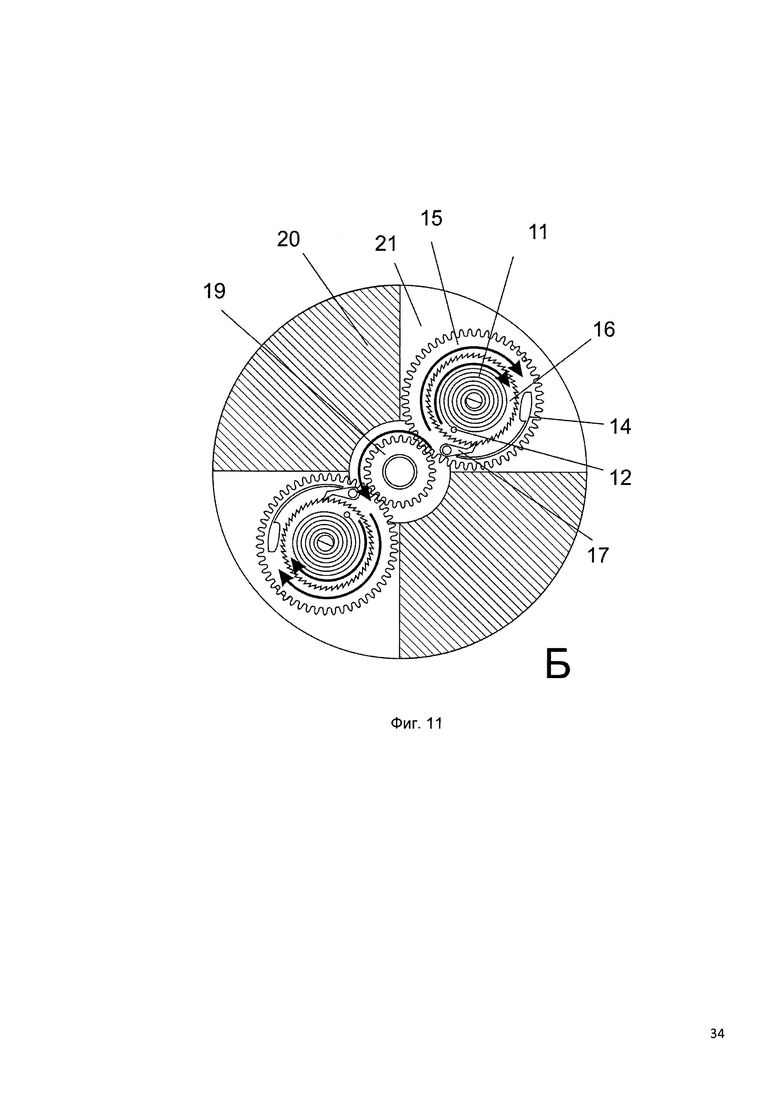
На фиг. 11 показана следующая фаза работы термочувствительного привода, где положение термочувствительного модуля находится над областью нагрева 21, а термочувствительный элемент 11 в результате нагрева разворачивается, разворачивается и внешний виток спирали, на котором закреплена стойка 12, которая закреплена на храповике 16. В результате разворота спирали 11 происходит поворот храповика 16 на своей оси. Зубья храповика толкают собачку 17, которая закреплена на колесе 15, и колесо 15 также поворачивается. Колеса 15 входят в зацепление с центральным колесом 19, которое также поворачивается. Вращение, полученное от колеса 19, передается далее на механизм подзавода.
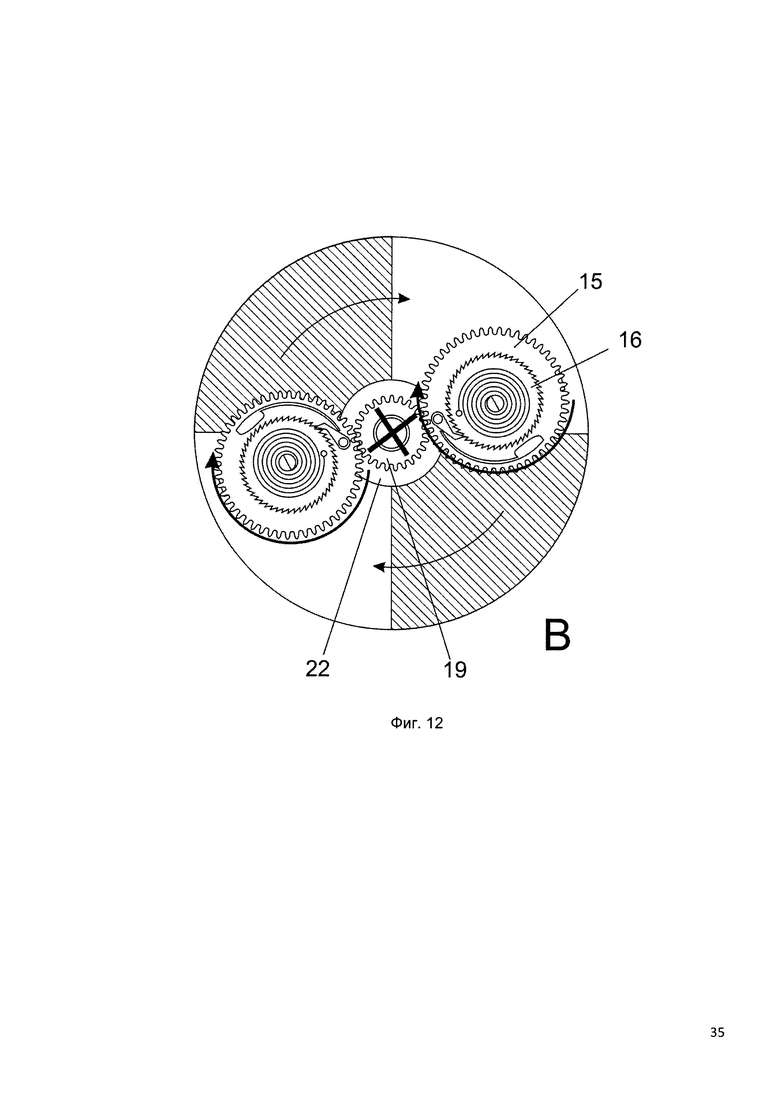
На фиг. 12 показана следующая фаза работы термочувствительного привода, где положение термочувствительного модуля меняется за счет поворота водила 22, которое приводится в движение передаточным механизмом. Термочувствительный модуль перемещается из зоны нагревания 21 в зону охлаждения 20. В этом случае колесо 19 находится на месте, зубья колеса 15 обкатываются вокруг неподвижного колеса 19, собачка, находящаяся на колесе 15, проскальзывает относительно храповика 16, который в момент поворота остается неподвижным относительно водила 22
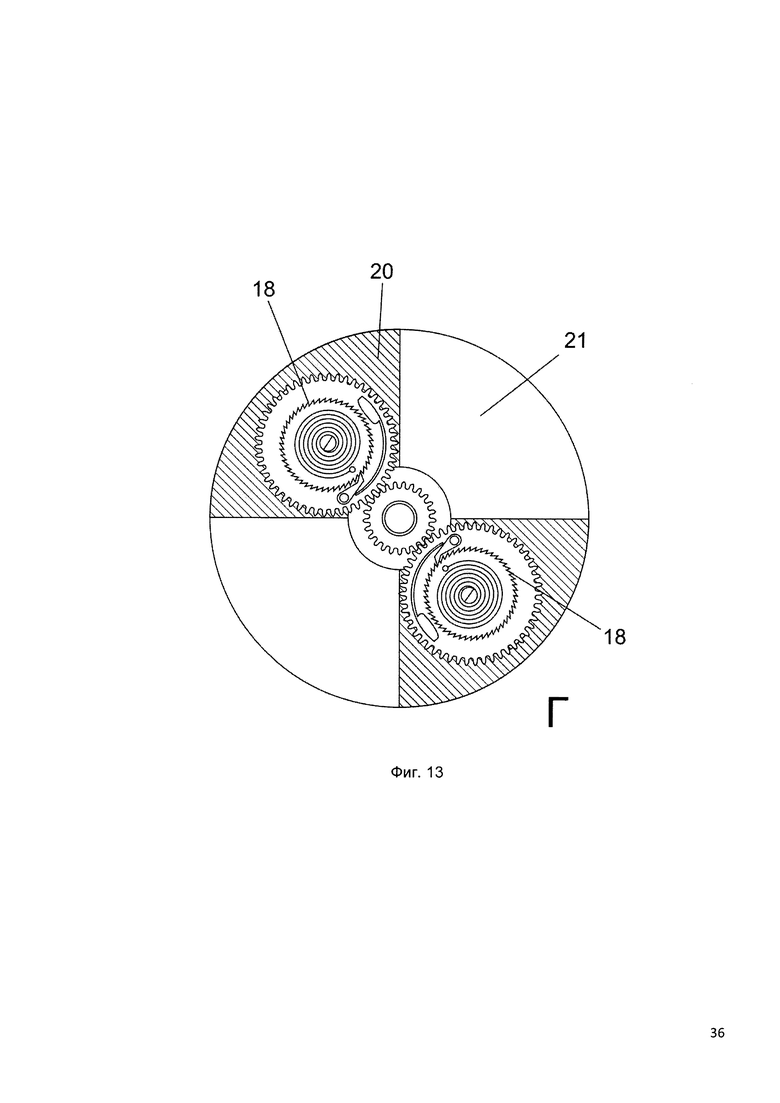
На фиг. 13 показана следующая фаза работы термочувствительного привода, где водило закончило поворот и термочувствительный модуль 18 остановился в зоне охлаждения 20. В этот момент спираль еще находится в скрученном состоянии.
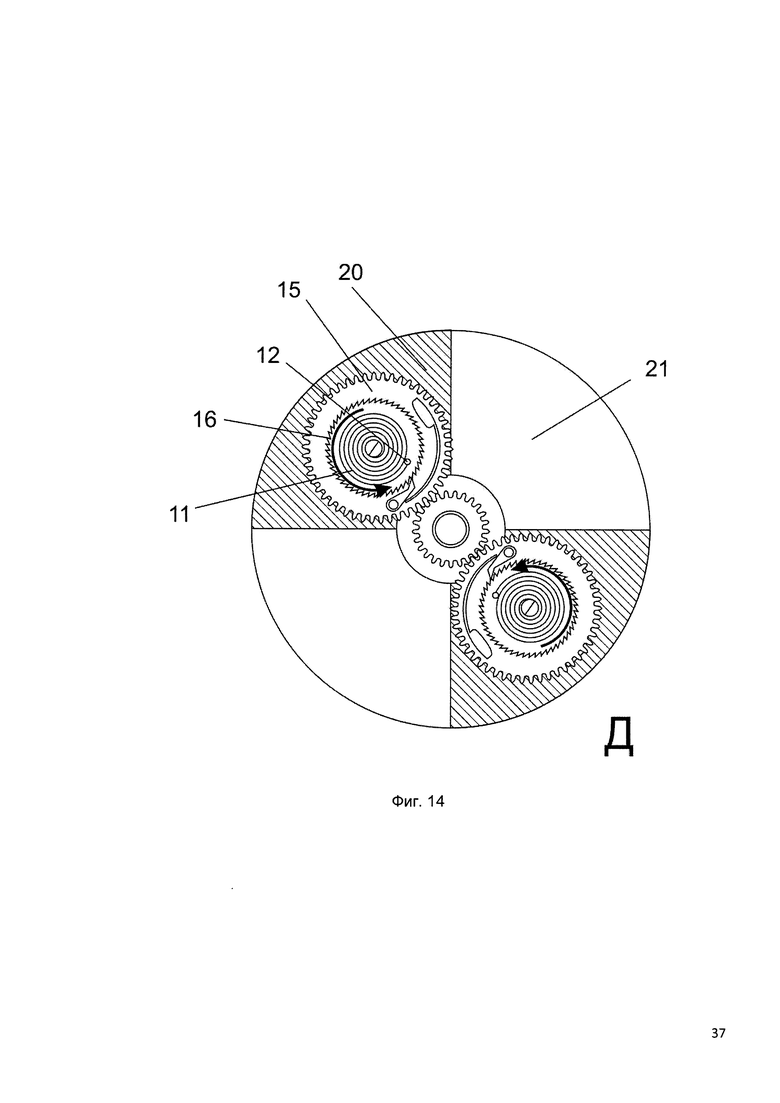
На фиг. 14 показана следующая фаза работы термочувствительного привода, где термочувствительный модуль находится в зоне 20. Зона 20 - зона охлаждения, в которой происходит охлаждение спирали 11, на внешнем конце которой находится колонка 11, которая возвращает храповик 16 в обратную сторону. Собачка при этом проскальзывает, и колесо 15 остается на месте.
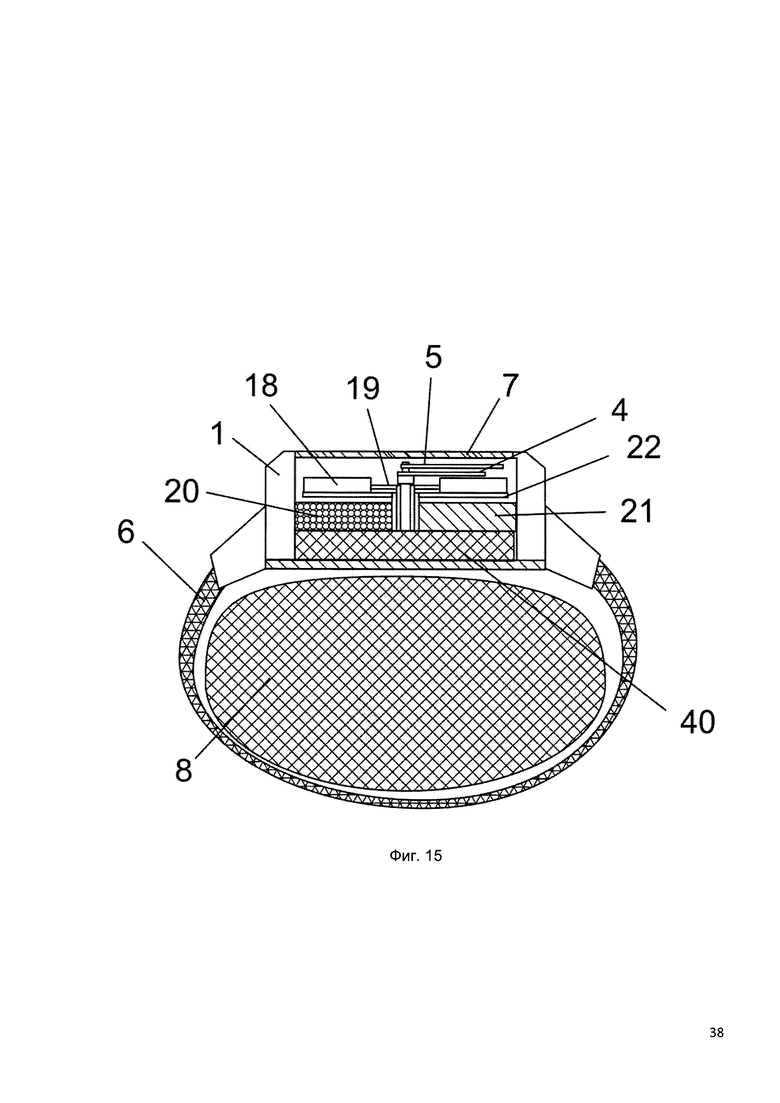
На фиг. 15 дано сечение часов с показанными на нем рукой 8 корпуса часов 8, ремешок 6, механизм часов 40, зона охлаждения 20, зона нагревания 21, термочувствительный модуль 18, центральное колесо 19, водило 22, часовая стрелка 4, минутная стрелка 5, стекло 7.
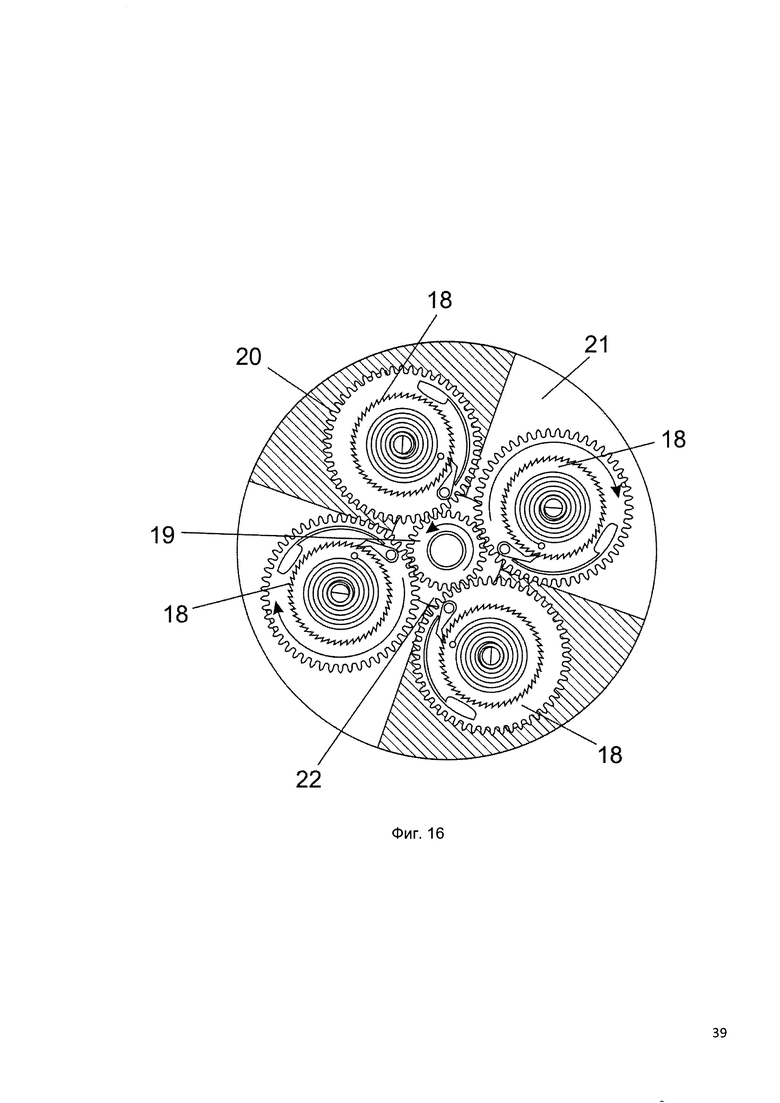
На фиг. 16 показан вариант термочувствительного привода в исполнении с четырьмя термочувствительными модулями 18 для обеспечения более эффективности работы.
Осуществление изобретения
Современная история сплавов с памятью формы начинается в конце сороковых годов 20 века, когда Курдюмов Г.В. и Хандорсон Л.Г. заметили, что исследуемый ими сплав обладает эффектом памяти формы. Позже этот эффект был признан открытием и получил имя Курдюмова. Уникальный эффект памяти формы быстро получил известность по всему миру и к настоящему времени разработано более 120 сплавов, обладающих способностью к самовосстановлению формы. Это сплавы на основе металлических систем Au-Cd, Cu-Zn-Al, Cu-Al-Ni, Fe-Mn-S, Fe-Ni, Cu-Al, Cu-Mn, Co-Ni, Ni-Ti, Ni-Al и других. При этом Ni-Ti - это сверхэластичные сплавы с эффектом памяти формы.
Эффекты памяти формы, обратимой памяти формы и сверхупругости в вышеназванных сплавах обусловлены макроскопическим отражением микро- и наноструктурных трансформаций кристаллической решетки при полиморфном аустенитно-мартенситном фазовом превращении первого рода и потому эти свойства сохраняются практически на всю жизнь существования конкретного изделия. В жизни реализация физических процессов в металле реализуется примерно следующим образом. Если приложить небольшое механическое усилие, изделию из такого сплава в охлажденном мартенситном состоянии можно придать любую конфигурацию и даже растянуть на 7-8%, в ряде случаев и до 12%, относительной длины, словно резиновый жгут. Эта конфигурация будет сохраняться до тех пор, пока предмет не нагреют до температуры начала аустенитного превращения, и в процессе нагрева до температуры завершения аустенитного превращения сплав не перейдет в аустенитную фазу, полностью восстанавливая прежнюю форму и реализуя при этом эффект памяти формы. Если ограничить внешнее воздействие на специальным образом обработанный элемент из сплава с памятью формы лишь нагревом и охлаждением в температурном интервале завершенных аустенитно-мартенситных превращений, то элемент станет самопроизвольно изгибаться как при нагреве, так и при охлаждении, реализуя эффект обратимой памяти формы. При этом, как и оптимально загруженные силовые элементы любых металлических конструкций, этот элемент может иметь форму работающей на растяжение тонкой прямолинейной проволоки, которая способна практически бесконечно самопроизвольно деформироваться при нагреве и охлаждении на 2% относительной длины, генерируя при нагреве в сотни раз большие, чем биметаллические элементы той же массы усилия. Эффект сверхупругости реализуется в изделии из сплава с памятью формы, находящемся в температурной зоне стабильного аустенитного состояния. Если при этом деформировать изделие из сплава с памятью формы, стимулируя тем самым мартенситное превращение при постоянной температуре путем принудительного силового воздействия, то после устранения этого воздействия элемент, словно пружина, полностью вернет себе исходную форму. С той лишь разницей, что в отличие от лучших пружин он будет иметь практически неисчерпаемый ресурс, и, имея форму прямолинейной струны, может быть сверхупруго деформирован на 7-8% относительной длины, запасая в десятки раз большую, чем традиционная пружина, энергию. Эффект памяти формы в сплавах, например, на основе Ni-Ti настолько четко выражен, что диапазон температур можно с большой точностью регулировать от нескольких до десятков градусов, вводя в сплав различные дополнительные легирующие элементы. Кроме того, сплавы на основе Ni-Ti, получившие принятое во всем мире название нитинол, достаточно технологичны в обработке, устойчивы к коррозии и обладают отличными физико-механическими характеристиками: например, предел прочности нитинола колеблется в диапазоне 770-1100 МПа, что соответствует аналогичным характеристикам большинства сталей, а демпфирующая способность выше, чем у чугуна, имеет высокую пластичность и способность вспоминать форму до миллиона раз. Поверхность нитиноловых элементов, как и у элементов из многих титановых сплавов, покрыта диоксидом титана, что предопределяет их высочайшую коррозионную стойкость к воздействию морской воды, рассолов, большинства кислот и щелочей. Уникальное сочетание физико-механических свойств позволило использовать сплавы с памятью формы в различных областях науки и техники, в том числе в медицине, космосе, добывающей промышленности, производстве всевозможных температурных датчиков и приводов, робототехнике при создании тепломеханических устройств [10].
При этом термобиметаллическая спираль служит для преобразования температуры в перемещение. Слой термобиметалла, обладающий большим коэффициентом линейного расширения, называется активным в отличие от инертного слоя с меньшим коэффициентом линейного расширения. При нагреве биметаллическая полоса изгибается в сторону инертного компонента.
Таким образом, в изобретении используется биметаллическая спираль, которая за счет своих уникальных свойств осуществляет работу механизма термочувствительного привода. При этом кроме формы термочувствительного элемента в виде спирали можно использовать иную геометрическую форму термочувствительного элемента, например отрезок прямой, отрезок дуги и т.д.
Термочувствительный привод, в свою очередь, содержит термочувствительный модуль, который перемещается попеременно от области с высокой температурой к области с низкой температурой с помощью средства перемещения модуля. Корпус часов и пространство внутри него выполнены таким образом, чтобы обеспечивать наличие внутри корпуса областей с разной температурой, например посредством использования материалов с высокой теплопроводностью и материалов с низкой теплопроводностью, а также дополнительных элементов охлаждения. Более подробно такие зоны обозначены на фиг. 15. Эти зоны являются областями охлаждения 20 и областями нагревания 21. То есть зона охлаждения - это область, изолирующая тепло (руки либо любого другого внешнего нагревателя), и зона нагревания - это область, пропускающая тепло (руки либо любого другого внешнего нагревателя). Причем скоростью, длительностью и тактом перемещений термочувствительного модуля управляет часовой механизм, как будет подробно описано ниже.
Термочувствительный привод предназначен для преобразования изменения температуры термочувствительного элемента в механическое движение, в механическую работу. К входу термочувствительного привода передается движение от часового механизма через передаточный механизм, на средство перемещения модуля, которое попеременно перемещает термочувствительный модуль от области с более высокой температурой к области с более низкой температурой. Затем при попадании термочувствительного модуля 18 в область с более высокой температурой 21 на выходе модуля за счет изменения геометрии термочувствительного элемента (термобиметаллической спирали) 11 образуется полезное вращательное движение, которое затем через колесо 19 передается на механизм подзавода. При этом кроме вращательного могут быть использованы и другие виды механического движения, например возвратно-поступательное.
Термочувствительный модуль представляет собой механизм, содержащий термочувствительный элемент 11 и средство преобразования движения термочувствительного элемента в механическое движение. На представленных чертежах для простоты объяснения проиллюстрировано только вращательное движение. Однако специалисту в этой области понятно, что также возможно осуществление и любого другого вида движения, например возвратно-поступательного.
Обратимся к фиг. 5 и 6, где представлено вращательное движение, выполненное односторонним. Для обеспечения одностороннего движения при изменениях температуры, т.е. при нагревании термочувствительного элемента 11, он поворачивает храповик 16 и тот, в свою очередь, через собачку 17 поворачивает колесо 15. При охлаждении термочувствительного элемента 11, он сворачивается, увлекая и поворачивая в обратную сторону храповик, но собачка проскальзывает по зубьям и колесо 15 остается на месте. Таким образом, термочувствительный модуль предназначен для преобразования изменения температуры в механическое движение.
При этом в варианте выполнения средства преобразования движения термочувствительного элемента в возвратно-поступательное движение, термочувствительный элемент выполнен в виде прямого отрезка. При изменении температуры движение передается на зубчатую рейку, зубья которой передают движение на храповое колесо подзавода, поворачивая его, при обратном движении термочувствительного элемента зубья рейки проскальзывают относительно храпового колеса.
Термочувствительный элемент (ТЧЭ) - это конструктивный элемент, при изменении температуры которого изменяется его геометрия. Например, ТЧЭ может быть биметаллический элемент или трубка с жидкостью. В нашем примере в качестве термочувствительного элемента используется биметаллическая спираль, указанная на фиг. 3. Принцип действия биметаллических термочувствительных элементов основан на свойстве биметалла изгибаться, менять геометрию при изменении температуры. Биметалл состоит из двух металлических пластинок с различным коэффициентом линейного температурного расширения, сваренных или спаянных вместе (фиг. 2). В качестве наиболее часто используемых компонентов или слоев для спиралей используют пары латунь-сталь, инвар-маломагнитная сталь, инвар-томпак и т.д. [11]. Работа ТЧЭ - биметаллической спирали показана на фиг. 4. При увеличении температуры спираль развертывается как показано на фиг. 4b, при понижении температуры - спираль свертывается, как показано на фиг. 4с. Проведенные испытания показывают, что угол разворота пружины при изменении температуры на один градус Цельсия составляет 3 градуса дуги.
Для попеременного перемещения термочувствительного модуля от области с более холодной температурой к области с более теплой используется средство перемещения модуля. Средство перемещения модуля получает движение от передаточного механизма, который, в свою очередь, приводится в движение часовым механизмом. В нашем примере (на фиг. 7) оно представляет собой водило 22, имеющего ось вращения, на поперечных мостах которого располагаются термочувствительные модули 18, скорость вращения водила управляется передаточным механизмом от часового механизма. В термочувствительном приводе вращение, получаемое от колеса 15 термочувствительного модуля 18, передается на колесо 19 и затем передается на механизм подзавода. При этом следует понимать, что перемещение модуля может также осуществляться как вращательным, так и другим способом движения, таким, например, как возвратно-поступательное.
Механизм подзавода предназначен для передачи движения от термочувствительного привода к двигателю часов. В его конструкцию, как правило, входит редуктор, который преобразует небольшой момент, вырабатываемый приводом, в большой момент, достаточный для вращения заводного вала двигателя и закручивания пружины двигателя.
Передаточный механизм предназначен для передачи движения от часового механизма к средству перемещения модуля 18 термочувствительного привода. В одном из вариантов конструкции он может быть выполнен как механизм, преобразующий вращательное движение зубчатой передачи часового механизма в прерывистое движения водила термочувствительного привода, за счет использования механизма прерывистого движения, например мальтийского механизма. Передаточный механизм предназначен для передачи движения от часового механизма к средству перемещения модуля термочувствительного привода.
Часовой механизм является основным элементом устройства, функция которого обеспечивать равномерное движение времяуказующих элементов, стрелочного механизма. Дополнительной функцией, используемой в нашем устройстве, является управление тактом работы термочувствительного привода. Часовой механизм содержит механический аккумулятор, зубчатую передачу, спусковой регулятор, осциллятор, стрелочный механизм, механизм завода часов и перевода.
Как известно, спусковым регулятором часового механизма называется устройство, состоящее из осциллятора, совершающего равномерные колебания, и спуска, преобразующего колебания в интервалы времени исполнительного устройства, при этом поступление энергии на осциллятор для поддержания его колебания регулируется тем же спуском.
Зубчатая передача (основная колесная система) состоит из зубчатых колес, связывает двигатель со спусковым регулятором и передает движение часовому механизму.
Механический аккумулятор (источник энергии, механический аккумулятор) необходим для аккумулирования энергии и приведения в действие и поддержания действия часового механизма. В основном в часах применяют пружинные и гиревые двигатели. Пружинный двигатель аккумулирует энергию завода часов. В наручных часах, как правило, используют барабан со спиральной пружиной внутри. Пружина в пружинных двигателях часов с подзаводом, как правило, выполняется с фрикционным внешним витком.
Стрелочный механизм является исполнительным устройством, как правило, состоит из системы зубчатых колес и передает движение от основной колесной системы стрелкам.
Механизм завода часов и перевода стрелок позволяет вручную завести пружинный двигатель и установить стрелки в нужное положение. Этот механизм может состоять из заводной головки, заводного вала, системы рычагов и зубчатых колес.
Осциллятор - это система, которая при смещении из положения равновесия испытывает действие возвращающей силы, пропорциональной смещению. В часах осциллятором, как правило, является маятник или система баланс-спираль 36, как показано, например, на фиг. 9.
Ниже раскрывается вариант исполнения и работы устройства согласно изобретению.
Предлагаемый вариант механизма часов (фиг. 9) имеет термочувствительный привод, содержащий зону охлаждения 20 и зону нагревания 21. Также содержит средство перемещения модуля, состоящее из водила 22, на котором расположен, по крайней мере, один термочувствительный модуль 18, имеющий, как показано на фиг. 5 и 6, термочувствительный элемент в виде термобиметаллической спирали 11, закрепленной внутренним концом на стойке крепления 13, а внешним концом - на стойке 12, которая жестко закреплена на храповом колесе 16. Храповое колесо 16 расположено соосно с колесом 15. На колесе 15 закреплена собачка 17, которая подпружинена пружиной 14, расположенной также на колесе 15. От колес 15 полезная работа передается на колесо 19 и далее на механизм подзавода. Механизм подзавода содержит триб 23, на который передается движение от колеса 19, соосно закрепленный на трибе храповик 24, собачку 25 и пружину 26, обеспечивающие одностороннее движение механизма подзавода и термочувствительного привода. Также содержит колесо 27. Триб 23 и колесо 27 образуют редуктор. Колесо 27 передает движение на двигатель часового механизма. Часовой механизм содержит механический аккумулятор, зубчатую передачу, спусковой регулятор, осциллятор, стрелочный механизм, механизм завода часов и перевода. На фиг. 9 - барабан 28 с пружиной 29, заводной вал 30, центральное колесо 31, промежуточное колесо 32, секундное колесо 33, анкерное колесо 35, анкерная вилка 34 и осциллятор баланс-спираль 36. В данном варианте исполнения устройства секундное колесо 33 приводит в движение передаточный механизм.
Передаточный механизм в нашем примере выполнен в виде мальтийского механизма - механизма прерывистого движения, содержащего кулачок 37, штифт 38 и мальтийский крест 39. При повороте мальтийский крест приводит в движение средство перемещения модуля - водило 22.
Работа устройства подробно раскрывается на фиг. 9. Как следует из фиг. 9, при нахождении термочувствительного модуля 18 в зоне нагрева 21 происходит изменение геометрии термочувствительного элемента - термобиметаллической спирали 11, и она разворачивается. Внутренний виток спирали жестко закреплен на стойке 13, которая, в свою очередь, жестко закреплена на водиле 22. При развороте спирали 11 она увлекает за собой храповик 16, на котором закреплена стойка 12, удерживающая внешний виток спирали 11. Храповик поворачивается и одним из зубьев толкает собачку 17, подпружиненную пружиной 14, которые размещены на колесе 15, колесо 15 с собачкой 17 поворачивается. В зацепление с колесом 15 входит центральное колесо 19, которое также совершает поворот. Колесо 19 связано с трибом 23 механизма подзавода. Соосно с трибом 23 закреплен храповик 24. Собачка 25 свободно проскальзывает, давая храповику 24 повернуться. Триб 23 входит в зацепление с колесом 27, образуя редуктор, который преобразует малый момент на трибе 23 в больший на колесе 27. На оси колеса находится заводной вал 30, который заводит, закручивает пружину 29 часового механизма. Собачка 25 не дает развернуться пружине 29 в обратную сторону. Пружина находится в корпусе барабана 28 с зубчатым венцом, который входит в зацепление с центральным колесом 31, которое, в свою очередь, передает вращение на промежуточное колесо 32, то, в свою очередь, на секундное 33, секундное входит в зацепление с анкерным колесом 35 и приводит в работу механизм спускового регулятора, состоящего из анкерного колеса 35, анкерной вилки 34 и узла баланс-спираль 35, который заставляет зубчатую передачу вращаться с одинаковой скоростью. На оси секундного колеса 35 расположен кулачок мальтийского механизма прерывистого движения, который содержит штифт 38. Секундное колесо совершает один оборот в минуту, и штифт кулачка 38 раз в минуту поворачивает лопасть мальтийского креста на 90 градусов. На оси мальтийского креста расположено водило 22, несущее термочувствительный модуль 18. При повороте водила 22, термочувствительный модуль в следующей своей фазе устанавливается в зону охлаждения 20. При охлаждении термочувствительный элемент 11 сворачивается. Сворачиваясь, термочувствительный элемент 11 поворачивает через стойку 12 храповое колесо 16. Собачка 17 не препятствует движению храпового колеса 16 и проскальзывает. Колесо 15 также остается на месте, так как движение его в противоположную сторону ограничивают храповик 24 и собачка 25.
Подробное описание рабочих фаз термочувствительного привода и цикл его работы показаны на фиг. 10-14.
На фиг. 10 отображено положение термочувствительного привода, где термочувствительные модули только что были перемещены в положение над областью нагрева 21, и термочувствительный элемент 11 находится в положении, где спираль свернута и еще не успела нагреться.
На фиг. 11 показана следующая фаза работы термочувствительного привода, где положение термочувствительного модуля находится над областью нагрева 21, и термочувствительный элемент 11 в результате нагрева разворачивается, разворачивается и внешний виток спирали, на котором закреплена стойка 12, которая, в свою очередь, закреплена на храповике 16. В результате разворота спирали 11 происходит поворот храповика 16 на своей оси. Зубья храповика толкают собачку 17, которая закреплена на колесе 15, и колесо 15 также поворачивается. Колеса 15 входят в зацепление с центральным колесом 19, которое также поворачивается. Вращение, полученное от колеса 19, передается далее на механизм подзавода.
На фиг. 12 показана следующая фаза работы термочувствительного привода, где положение термочувствительного модуля меняется за счет поворота водила 22, которое приводится в движение передаточным механизмом. Термочувствительный модуль перемещается из зоны нагревания 21 в зону охлаждения 20. В этом случае колесо 19 находится на месте, зубья колеса 15 обкатываются вокруг неподвижного колеса 19, собачка, находящаяся на колесе 15, проскальзывает относительно храповика 16, который в момент поворота остается неподвижным относительно водила 22.
На фиг. 13 показана следующая фаза работы термочувствительного привода, где водило закончило поворот и термочувствительный модуль 18 остановился в зоне охлаждения 20. В этот момент спираль еще находится в скрученном состоянии.
На фиг. 14 показана фаза работы термочувствительного привода, где термочувствительный модуль находится в зоне 20. Зона 20 - зона охлаждения, в которой происходит охлаждение спирали 11, на внешнем конце которой находится стойка 12, которая возвращает храповик 16 в обратную сторону. Собачка при этом проскальзывает, и колесо 15 остается на месте.
Таким образом, обеспечивается достижение требуемого технического результата, а именно значительное увеличение (на порядки!) эффективности подзавода двигателя часового механизма вследствие самообеспечения устройством попеременного изменения температуры относительно термочувствительного элемента.
Проведенный анализ показывает также, что все общие и частные признаки изобретения являются существенными, так как каждый из них необходим, а все вместе они не только достаточны для достижения цели изобретения, но и позволяют реализовать изобретение промышленным способом.
Источники информации
1. http://bse.sci-lib.com/article121589.html Часы (прибор). Большая Советская Энциклопедия
2. http://www.watches.ru/index.php?page=30&art=55
3. http://remontchasov.ucoz.ru/index/avtopodzavod_v_chasakh/0-45.
4. Аксельрод М. Теория и проектирование приборов времени. Л., Машиностроение, 1969, с. 45-47.
5. SU 146702, опубл. БИ №8, 1962.
6. Тарасов С.В. Приборы времени. М., Машиностроение, 1976, с. 39-40.
7. RU 137129, ООО «Константин Чайкин», опубл. 27.01.2014.
8. Уокер Г. Машины, работающие по циклу Стирлинга. - Пер. с англ. М., Энергия, 1978; Двигатели Стирлинга./Под ред. М.Г.Круглова. М., Машиностроение, 1977.
9. US 6457856, Филипс Стивен, 01.10.2002.
10. Лихачев В.А. и др. Эффект памяти формы. Л., Изд-во ЛГУ, 1987, 216 с.
11. Асс Б.А., Жукова Н.М., Антипов Е.Ф. Детали и узлы авиационных приборов и их расчет. М., 1966, стр. 102-112.
Использование: изобретение относится к области часовой промышленности и может быть использовано при производстве механических наручных часов с автоматическим приводом с возможностью получения энергии движения от разности температур различных областей пространства (снаружи/внутри корпуса часов). Сущность: часовой механизм имеет термочувствительный привод, содержащий, по меньшей мере, один термочувствительный модуль, в свою очередь, содержащий термочувствительный элемент, средство преобразования движения термочувствительного элемента в движение механизма подзавода и средство перемещения термочувствительного модуля, скорость которого задается часовым механизмом, при этом термочувствительный привод имеет, по меньшей мере, одну зону охлаждения и, по меньшей мере, одну зону нагревания. Часовой механизм также содержит передаточный механизм, предназначенный для передачи движения от часового механизма к средству перемещения термочувствительного модуля, и механизм подзавода, который предназначен для передачи движения от термочувствительного привода двигателю часового механизма. Технический результат: значительное увеличение (на порядки!) эффективности подзавода двигателя часового механизма вследствие самообеспечения устройством попеременного изменения температуры относительно термочувствительного элемента. 4 н. и 17 з.п. ф-лы, 16 ил.
1. Термочувствительный привод часового механизма содержащий, по меньшей мере, один термочувствительный модуль, в свою очередь, содержащий термочувствительный элемент, и средство преобразования движения термочувствительного элемента в движение механизма подзавода, отличающийся тем, что дополнительно содержит средство перемещения термочувствительного модуля, скорость которого задается часовым механизмом, при этом термочувствительный привод имеет, по меньшей мере, одну зону охлаждения и, по меньшей мере, одну зону нагревания.
2. Термочувствительный привод по п. 1, отличающийся тем, что термочувствительный элемент выполнен в виде термобиметаллической спирали.
3. Термочувствительный привод по п. 1, отличающийся тем, что средство преобразования движения термочувствительного элемента в движение механизма подзавода совершает либо вращательное, либо возвратно-поступательное движение.
4. Термочувствительный привод по п. 3, отличающийся тем, что для совершения вращательного движения средство преобразования движения выполнено в виде стойки крепления внешнего витка спирали, стойки крепления внутреннего витка спирали, храпового колеса, расположенного соосно с колесом термочувствительного модуля, на котором закреплена собачка, подпружиненная пружиной, также расположенной на колесе термочувствительного модуля.
5. Термочувствительный привод по п. 4, отличающийся тем, дополнительно содержит центральное колесо для передачи вращения от термочувствительного привода к механизму подзавода двигателя часов.
6. Термочувствительный привод по п. 3, отличающийся тем, что для совершения возвратно-поступательного движения средство преобразования движения выполнено в виде прямого отрезка, соединенного с зубчатой рейкой, зубья которой передают движение на храповое колесо подзавода.
7. Термочувствительный привод по п. 1, отличающийся тем, что в качестве средства перемещения модуля используют водило.
8. Термочувствительный привод по п. 7, отличающийся тем, что водило имеет ось вращения.
9. Термочувствительный привод по п. 7, отличающийся тем, что водило имеет поперечные мосты, на которых расположены термочувствительные модули.
10. Термочувствительный привод по п. 1, отличающийся тем, что количество термочувствительных модулей соответствует количеству зон охлаждения и нагрева.
11. Часовой механизм, содержащий механический аккумулятор, зубчатую передачу, спусковой регулятор, осциллятор, стрелочный механизм, отличающийся тем, что дополнительно содержит термочувствительный привод по любому из пп. 1-10.
12. Часовой механизм по п. 11, отличающийся тем, что дополнительно содержит механизм завода и перевода стрелок.
13. Часовой механизм по п. 11, отличающийся тем, что дополнительно содержит передаточный механизм и механизм подзавода.
14. Часовой механизм по п. 13, отличающийся тем, что механизм подзавода предназначен для передачи движения от термочувствительного привода двигателю часового механизма.
15. Часовой механизм по п. 13, отличающийся тем, что механизм подзавода содержит триб, на который передается движение от центрального колеса термочувствительного привода, соосно закрепленные на трибе храповик, собачку, пружину, которая обеспечивает одностороннее движение механизма подзавода, и барабанное колесо.
16. Часовой механизм по п. 13, отличающийся тем, что передаточный механизм предназначен для передачи движения от часового механизма к средству перемещения термочувствительного модуля.
17. Часовой механизм по п. 13, отличающийся тем, что передаточный механизм приводится в движение колесной системой часового механизма.
18. Часовой механизм по п. 13, отличающийся тем, что передаточный механизм выполнен в виде мальтийского механизма, содержащего кулачок, штифт и мальтийский крест.
19. Часовой механизм по п. 18, отличающийся тем, что мальтийский механизм приводит в движение средство преобразования движения термочувствительного элемента в движение механизма подзавода.
20. Часы, имеющие корпус и средство индикации, также содержат часовой механизм по любому из пп. 11-19.
21. Способ автоматического подзавода часового механизма, при котором осуществляют непрерывный подзавод пружинного двигателя часового механизма при помощи термочувствительного привода по любому из пп. 1-10.
| Рабочий орган льдоскалывающего устройства | 1960 |
|
SU137129A1 |
| US 4174607 A, 20.11.1979 | |||
| US 5867454 A, 02.02.1999 | |||
| US 6457856 B1, 01.10.2002. | |||

