ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к способу, устройству и компьютерному программному продукту для автоматического получения данных клинических МРТ-изображений.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В качестве части процедуры получения изображений структур внутри тела пациента в МРТ-сканерах используют большое статическое магнитное поле для выравнивания ядерных спинов атомов. Это большое статическое поле обозначают как поле B0.
В процессе МРТ-сканирования радиочастотные (РЧ) импульсы, генерируемые генераторной катушкой, вызывают возмущения локального магнитного поля, и РЧ-сигналы, испускаемые посредством ядерных спинов, определяют с помощью приемной катушки. Эти РЧ-сигналы используют для создания МРТ-изображений. Эти катушки также можно обозначить как антенны. Кроме того, генераторную и приемную катушки также можно объединить в одну приемопередающую катушку, которая выполняет обе функции. Понятно, что использование термина приемопередающая катушка также относится к системам, в которых используют отдельные генераторную и приемную катушки. Генерируемое РЧ-поле обозначают как поле B1.
МРТ-сканеры могут создавать изображения или срезов или объемов. Срез представляет собой тонкий объем толщиной только в один воксель. Воксель представляет собой маленький объем, по которому усредняют МРТ-сигнал, и определяет разрешение МРТ-изображения. Следует понимать, что термин относится как к срезам, так и к объемам.
Когда проводят МРТ-исследование, созданные МРТ-изображения меняются во времени. Если проводят исследование движущейся части организма, например сердца или органа, расположенного вблизи от диафрагмы, то нужно получать изображения, меняющиеся во времени, и коррелировать с биением сердца и дыхательным циклом. В данной области техники существуют стандартные способы компенсации такого движения. Правильная визуализация анатомии определенных органов и частей организма также может представлять сложность. Например, для получения клинических МРТ-изображений сердца и колена, которые можно использовать в диагностике, необходимы высококвалифицированные и хорошо подготовленные операторы.
Например, в процессе МРТ-исследования сердца для постановки конкретного диагноза критичны местоположение и ориентация полученных срезов по отношению к анатомии сердца. Для выполнения МРТ-исследования этого типа оператор должен выполнить серию сканирований. Сначала оператор визуализирует несколько срезов организма пациента для примерного определения ориентации анатомии пациента. Используя эти приблизительные изображения, оператор вручную определяет местоположение диафрагмы и сердца. Оператор определяет ориентацию при минимальном стеке срезов. На практике нужно определить ориентацию направляющего пучка, регулировочного объема или других элементов, что требует временных затрат для выполнения этой операции. Стеком срезов определяется ориентация, поле наблюдения и серия срезов со всеми их параметрами, которые используют в следующем сканировании. Направляющий пучок представляет собой тонкий объем, который визуализируют для корреляции положения диафрагмы и компенсации дыхания пациента. Регулировочный объем представляет собой объем, из которого используют информацию для компенсации локальных флуктуаций поля B0.
После определения этих объемов получают вторую серию изображений, разрешенных для фазы дыхания пациента и сердца. Затем оператор использует этот новый набор МРТ-изображений для более подробного исследования анатомии сердца и вручную определяет, в зависимости от предполагаемого нарушения, какие срезы или объемы подлежат визуализации для постановки клинического диагноза врачом. Изображения, которые предназначены для задачи определения диагноза, обозначают как клинические МРТ-изображения.
Для сердца настройки положения и ориентации стека срезов, использованных для получения клинических МРТ-изображений, в большой степени зависят от указаний пациента. Например, визуализация, необходимая для правильной диагностики врожденного порока сердца, может в достаточной мере отличаться от визуализации ишемической болезни сердца. Чтобы правильно настроить систему МРТ для получения правильных МРТ-изображений, оператор должен обладать обширными навыками, опытом и способностью визуализировать трехмерные структуры по двухмерным проекциям или срезам на мониторе компьютера. Здесь сложность заключается в том, что клинические изображения, полученные различными операторами, имеют различные уровни качества. Кроме того, например, в последующих процедурах трудно добиться воспроизводимости клинических МРТ-изображений, когда настройку положения и ориентации стека срезов выполняют вручную. Когда оператор получает клинические изображения низкого качества, их следует получать повторно. Конечно, для госпиталей это требует затрат и повышает стоимость выполнения МРТ-исследования пациента. В патентной заявке США US 2005/0165294 описано использование трехстадийной процедуры для коррекции положения пациентов в процессе медицинского сканирования. В публикации «Automated Observer-independent Acquisition of Cardiac Short-Axis MR Images - A Pilot Study”, Lelieveldt et al., Radiology, Radiological Society of North America, Oak Brook, IL, US,. том 221, №2, ноябрь 2001. стр.537-542, описано автоматическое определение объема изображений по короткой оси непосредственно по осмотровому изображению. В публикации «Automatic Scan Prescription for Brain MRI”, Magnetic Resonance in Medicine, Academic Press, Duluth, MN, US, том 45, январь 2001, стр. 486-494, описано получение пилотного сканирования пациента, подгонка поверхности мозга пациента к образцовой поверхности мозга и использование трансформации для трансформации местоположения и ориентации оптимальных плоскостей сканирования для текущего пациента. В документе US 6574304 B1 описано получение данных изображения, содержащих признаки, представляющие интерес, выполнение алгоритма CAD на данных изображения и затем получение дополнительных данных изображения, которые больше подходят для визуализации или анализа признаков, представляющих интерес.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к способу получения данных МРТ-изображения, компьютерному программному продукту и устройству для получения данных МРТ-изображения, как заявлено в независимых пунктах формулы изобретения. Варианты осуществления изобретения изложены в зависимых пунктах формулы изобретения.
В настоящем документе поле наблюдения (ПН) определяют в качестве обозначения объема, для которого конструируют МРТ-изображение. Данные МРТ, используемые для создания МРТ-изображения, представляют собой радиосигналы, которые собирают в частотном интервале. Следовательно важно отметить, что данные МРТ превращают в изображение, используя интеграл Фурье и в результате этого ткани за пределами ПН вносят вклад в изображение.
Варианты осуществления изобретения предусматривают способ и устройство для автоматического планирования сканирования. Эти варианты осуществления, в частности, полезные в качестве автоматического планирования персонифицированной геометрии, на консоли МРТ-сканера устраняют ошибки оператора, снижают требования к уровню подготовки операторов и экономят время в процессе МРТ-исследования. Другое преимущество автоматического планирования сканирования заключается в избегании вариабельности у одного оператора или среди нескольких операторов.
Автоматическое последовательное планирование сканирования обладает преимуществами по сравнению с однократным осмотровым сканированием. Для некоторых анатомических структур автоматическое последовательное сканирование является более быстрым, чем однократное осмотровое сканирование. Также последовательные осмотровые сканирования содержат больше информации, чем однократное осмотровое сканирование и допускают точное и согласованное планирование диагностических сканирований. Изображения, предназначенные для задачи определения диагноза, определяют в настоящем документе как клинические МРТ-изображения. Осмотр или осмотровое сканирование определяют в настоящем документе как МРТ-изображение, которое используют для планирования клинического МРТ-изображения.
Варианты осуществления изобретения относятся к способу получения по меньшей мере одного клинического МРТ-изображения субъекта. МРТ-изображение определяют как графическое представление данных МРТ. Данные МРТ представляют собой любые данные, полученные МРТ-сканером. Клиническое МРТ-изображение представляет собой МРТ-изображение, которое использует врач для диагностирования пациента.
В соответствии с вариантами осуществления изобретения получают многократное двухмерное МРТ-изображение субъекта с использованием набора предварительно выбранных параметров. Двухмерное МРТ-изображение представляет собой совокупность срезов, которые дают общее представление об анатомии субъекта. В норме двухмерные МРТ-изображении являются анизотропными. Например, типичные размеры вокселя, используемого для сагиттальных срезов в процессе создания двухмерного МРТ-изображения, используемого в МРТ-исследовании сердца, составляют 1,7 мм на 1,75 мм на 10 мм. Расстояние между срезами может быть даже больше размера вокселя. Для этих сагиттальных срезов толщина среза составляет 10 мм. Расстояние между центрами вокселей составляет 15 мм. Следовательно, в данном случае между срезами существует пропуск в 5 мм. Число объемов, число срезов в каждом объеме, толщина среза, расстояние между срезами и разрешение в пределах среза, используемые для создания двухмерного МРТ-изображения, зависят от выбранного протокола.
Сначала ориентация анатомической структуры пациента неизвестна. Пациента помещают внутрь МРТ-сканера так, что предварительно определенный набор срезов будет определять внутреннюю анатомическую структуру пациента. Это можно выполнить посредством получения предварительно определенного числа осевых, коронарных и сагиттальных срезов с предварительно определенной ориентацией. Число, положение и точная ориентация этих срезов предварительно определены выбранным протоколом МРТ. Двухмерное МРТ-изображение используют для создания трехмерного объема, состоящего из вокселей. Если все стороны этих вокселей идентичны, то объем является изотропным. Объем не обязан быть изотропным, но изотропный объем позволяет легче применять детектор контуров. Значения отдельных вокселей вычисляют посредством линейной интерполяции значений вокселей двухмерного МРТ-изображения.
Контуры в трехмерном объеме определяют, используя модуль определения контуров. Это можно выполнить, используя подходящий алгоритм определения контуров, такой как оператор Собеля. Другие альтернативы включают алгоритмы, основанные на: детектор контуров Канни, дифференциальный детектор контуров, оператор Марра-Хилдрета, детектор контуров на основе фазовой конгруэнтности, оператор Лапласа, детектор контуров Дерише, детектор контуров Ротвелла, оператор Превита, оператор Кирша, оператор Хюккеля и оператор Робертса. Оператор Собеля работает в конкретных плоскостях трехмерного объема. Оператор Собеля можно применять ко всем вокселям, лежащим на одной плоскости. Оператор Собеля также можно применять к плоскостям, которые не лежат в плоскости вокселей. В этом случае воксели взвешены в соответствии с тем, сколько вокселей пересекает плоскость. Затем идентифицируют анатомические ориентиры с использованием модуля анатомических ориентиров, используя набор контуров. Трехмерный объем сегментируют, используя первую деформируемую модель с ограниченной формой, используя первый модуль сегментирования. Деформируемые модели с ограниченной формой рассмотрены в источнике Weese et al., «Shape Constrained Deformable Models for 3D Medical Image Segmentation», Lecture Notes In Computer Science том 2082, 2001, стр. 380-387 (далее цитируемом как Weese), который включен в настоящий документ в качестве ссылки. Деформируемая модель с ограниченной формой представляет собой трехмерную модель анатомической структуры пациента, которую деформирует модуль сегментирования, чтобы она совпала с характерными точками. Деформируемую модель с ограниченной формой итеративно деформируют, чтобы она совпадала с характерными точками, которые вычисляют с использованием как модели, так и данных изображения. Характерные точки можно выделить из изображения, используя алгоритм выявления характерных точек. Модель вычисляет сжатие и растяжение на поверхности модели, а также внутренние силы, вызванные деформацией.
Затем определяют объем, представляющий интерес, внутри трехмерного объема с использованием первого модуля распознавания шаблонов. Объем, представляющий интерес, представляет собой область, для которой получают данные МРТ. Данные МРТ создают из данных в Фурье-пространстве. В результате этого области за пределами физических границ объема, представляющего интерес, вносят вклад в МРТ-изображение. Затем для объема, представляющего интерес, получают одно или несколько предварительных МРТ-изображений. Затем предварительные МРТ-изображения сегментируют с использованием второй деформируемой модели с ограниченной формой, используя второй модуль сегментирования. Затем используют второй модуль распознавания шаблонов для планирования клинических МРТ-изображений. Наконец, получают одно или несколько клинических МРТ-изображений.
В другом варианте осуществления данные МРТ, полученные в процессе получения клинического МРТ-изображения, можно сохранить в компьютерном запоминающем устройстве для последующего повторного использования. Данные МРТ, которые можно хранить, состоят из: многократное двухмерное изображение, трехмерный объем, набор контуров, один или несколько анатомических ориентиров, сегментированный трехмерный объем, объем, представляющий интерес, одно или несколько предварительных МРТ-изображений и одно или несколько предварительных сегментированных МРТ-изображений. Позже эти данные МРТ можно извлечь из компьютерного запоминающего устройства и повторно использовать для создания второго набора данных планирования для планирования клинического МРТ-изображения. Это обладает преимуществом, которое заключается в том, что второе клиническое МРТ-изображение можно планировать без обязательного повторения всего способа. Например, можно повторно использовать многократное двухмерное изображение или трехмерный объем. Это уменьшит время, необходимое для получения второго клинического МРТ-изображения.
В другом варианте осуществления первый модуль распознавания шаблонов может определить несколько объемов, представляющих интерес. Это выгодно, поскольку ткань, окружающая объем, подлежащий визуализации, также влияет на полученную МРТ. Несколько объемов могут быть перекрывающимися, не перекрывающимися и могут покрывать одинаковый объем. Первый модуль распознавания шаблонов выбирает каждый объем, который должен быть в первом поднаборе, втором поднаборе или третьем поднаборе. Элементы первого и третьего поднаборов визуализируют один или несколько раз посредством МРТ-сканера. К элементам второго поднабора и третьего поднабора примеряют способ МРТ, выбранный из группы, состоящей из: импульсов подготовки намагничивания, импульсов подавления жировой ткани, мечения артериальных спинов (ASL), способа регионального насыщения (REST), способа спектрального предварительного насыщения посредством восстановления инверсии «Spectral Presaturation Inversion Recovery (SPIR)», инверсии, направляющего пучка, регулировки B1 и регулировки B0. Ткани, расположенные за пределами объема, подлежащего визуализации для получения клинического МРТ-изображения, могут влиять на качество изображения. Применение этих способов приносит пользу в виде улучшения качества изображения. Данные МРТ, полученные из всех этих объемов, представляющих интерес, используют для создания данных планирования. Преимущество использования всех полученных данных МРТ состоит в том, что анатомическая структура и положение анатомической структуры известны более подробно.
В другом варианте осуществления первый модуль распознавания шаблонов представляет собой обученный модуль распознавания шаблонов. Преимуществом этого является то, что модуль распознавания шаблонов можно тренировать с использованием набора обучающих изображений, на которых правильно расположены объем или объемы, представляющие интерес. Это можно реализовать посредством использования множества различных способов.
Примеры различных способов или алгоритмов, которые можно использовать, представляют собой: анализ главных компонентов, нейронная сеть, алгоритм CN2, алгоритм C4.5, итеративный дихотомический преобразователь сигнала 3 (ID3), алгоритм поиска ближайшего соседа, алгоритм наивного Байесовского классификатора, голографическая ассоциативная память или алгоритм обучения восприятию.
В другом варианте осуществления второй модуль распознавания шаблонов представляет собой обученный модуль распознавания шаблонов. Это будет обладать тем же преимуществом, как и воплощение первого обученного модуля распознавания шаблонов в виде обученного модуля распознавания шаблонов. Второй модуль распознавания шаблонов можно воплотить с использованием того же выбора алгоритмов и способов, что и первый модуль распознавания шаблонов. Если для воплощения первого и второго модуля распознавания шаблонов используют одинаковые алгоритмы или способы, они все еще будут оставаться отдельными модулями распознавания шаблонов. Это обусловлено тем, что они будут проходить различное обучение. Производитель системы МРТ может обучать первый модуль распознавания шаблонов и второй модуль распознавания шаблонов и доставлять их оператору для использования.
В другом варианте осуществления модуль анатомического распознавания может представлять собой воплощение алгоритма идентификации характеристик. Этот алгоритм идентификации характеристик может представлять собой такой алгоритм, как преобразование Хоуга или масштабно-инвариантное преобразование признаков (SIFT). Эти алгоритмы обладают преимуществом, которое заключается в способности идентифицировать сложную геометрию. Алгоритм идентификации характеристик также может представлять собой обычный алгоритм, который основан на предыдущем знании анатомии. Например, на МРТ-изображении легко идентифицировать диафрагму. Алгоритм определения контуров определяет местоположение границы диафрагмы, и анализ связанных компонент создает поверхность, которую можно идентифицировать и использовать посредством первого модуля сегментирования.
В другом аспекте компьютерный программный продукт, содержащий набор исполняемых компьютером инструкций можно использовать для автоматизации вариантов осуществления изобретения. Это является преимуществом, поскольку компьютер или микропроцессор может выполнять вычисления значительно быстрее человека-оператора.
В другом аспекте вариант осуществления устройства, как описано в независимом пункте формулы изобретения 7, можно использовать для получения клинических данных МРТ.
В другом варианте осуществления варианты осуществления устройства содержат средство для хранения предварительно полученных данных МРТ для целей планирования новых клинических МРТ-изображений.
В другом варианте осуществления в вариантах осуществления устройства воплощают первый модуль распознавания шаблонов и/или второй модуль распознавания шаблонов в виде обученных модулей распознавания шаблонов.
В другом варианте осуществления вариант осуществления первого модуля распознавания шаблонов выполнен с возможностью определения нескольких объемов, представляющих интерес.
В другом варианте осуществления варианты осуществления устройства имеют пользовательский интерфейс, который выполнен с возможностью графического отображения набора данных планирования перед получением клинического МРТ-сканирования. Это обладает преимуществом, которое заключается в том, что пользователь может контролировать качество клинических МРТ-изображений. После отображения изображения оператор имеет выбор одобрить или отклонить данные планирования. Если оператор одобряет данные планирования, то система МРТ продолжает получать данные МРТ и создавать МРТ-изображения. Если оператор отклоняет данные планирования, оператор будет стоять перед выбором повторного запуска процесса в варианте осуществления устройства и создания нового набора данных планирования или редактирования данных планирования вручную. Оператор будет стоять перед выбором исследования набора отклоненных данных, который включает: многократное двухмерное изображение, трехмерный объем, контуры, анатомические ориентиры, сегментированный трехмерный объем, объем, представляющий интерес, одно или несколько предварительных МРТ-изображений и одно или несколько предварительных сегментированных МРТ-изображений и набора данных планирования. Это обладает тем преимуществом, что оператор может исследовать все данные МРТ и данные планирования.
В другом варианте осуществления вариант осуществления пользовательского интерфейса выполнен с возможностью ручного ввода модификации набора отклоненных данных. Это обладает тем преимуществом, что оператор может модифицировать любые ошибки, которые может выполнить устройство. Затем модифицированные отклоненные данные используют для создания модифицированного набора данных планирования. Это обладает тем преимуществом, что устройство не должно повторять весь способ, что экономит время.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее только в качестве примера описаны предпочтительные варианты осуществления изобретения со ссылками на рисунки, на которых:
на фиг.1 представлена функциональная схема варианта осуществления системы МРТ, которая способна автоматически планировать и получать МРТ-изображения,
на фиг.2 представлена блок-схема, показывающая вариант осуществления способа по изобретению,
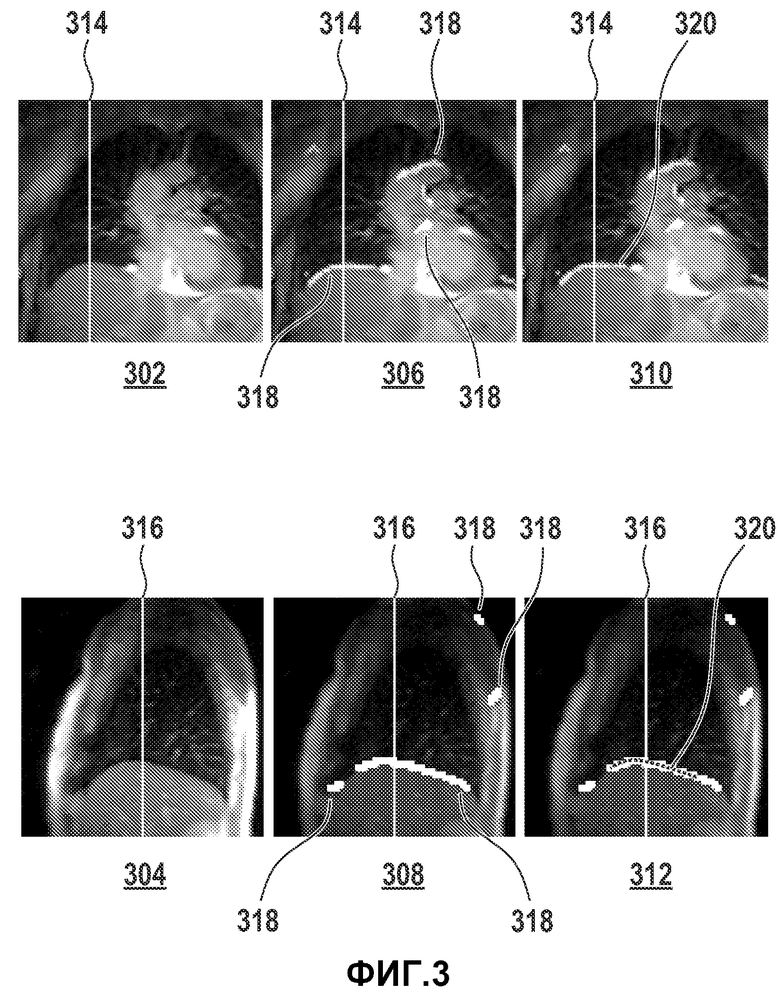
на фиг.3 представлена серия коронарных и сагиттальных МРТ-изображений, которые демонстрируют вариант осуществления способа автоматического определения диафрагмы,
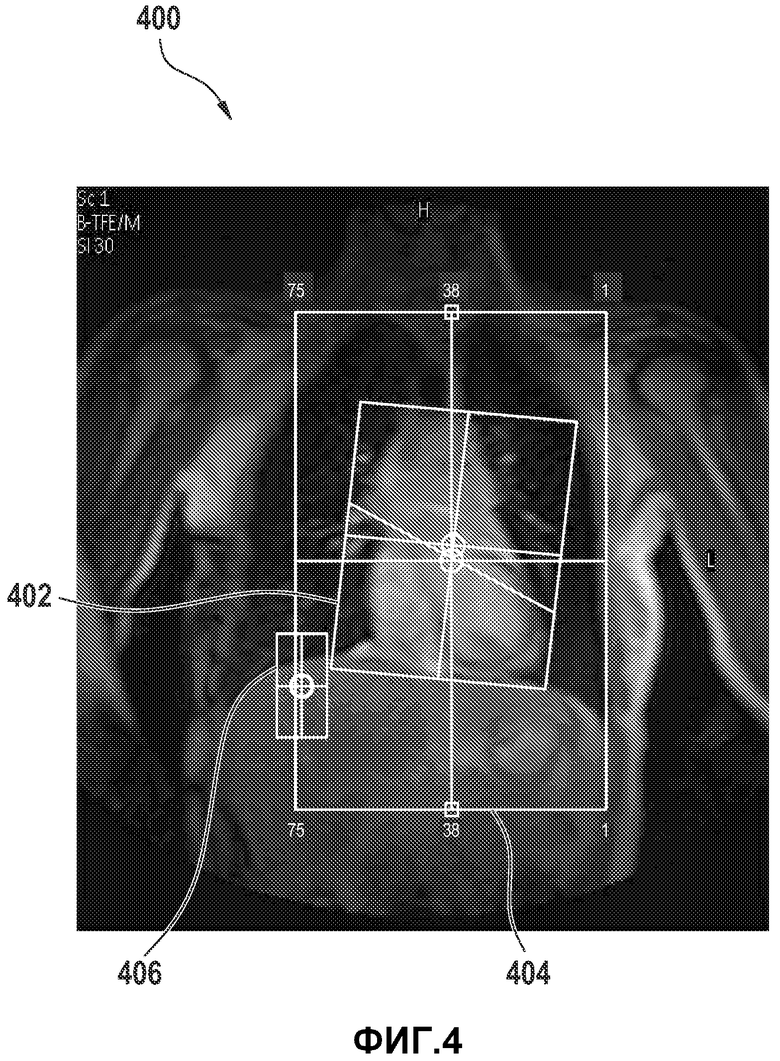
на фиг.4 представлено коронарное МРТ-изображение, на котором показано размещение объемов, представляющих интерес.
ПОДРОБНОЕ ОПИСАНИЕ
На фиг.1 представлен вариант осуществления МРТ-сканера 100, который позволяет выполнять варианты осуществления изобретения. В него входит постоянный магнит 108, который создает большое магнитное поле, также известное как B0, которое способно заставить ядерные спины внутри пациента 112 или другого объекта выравниваться вдоль поля B0. Пациент 112 покоится в отверстии в магните на опоре 110. Градиентные катушки 104 также расположены внутри отверстия магнита и способны корректировать магнитное поле. Смежно с объемом пациента 112, который подлежит визуализации, расположена приемопередающая катушка 116. Эта катушка передает и принимает РЧ-сигналы. В режиме передачи катушка генерирует РЧ-сигнал, который создает локальные возмущения магнитного поля, которые используют для манипуляции ориентацией ядерных спинов внутри пациента 112. В режиме приема приемопередающая катушка с фазированной решеткой 116 принимает РЧ-сигнал, вызванный прецессией ядерных спинов в поле B0. Функцию приемопередающей катушки очень часто делят между отдельными передающей и приемной катушками. Термин приемопередающая катушка, как используют в настоящем документе, предназначен для обозначения обеих возможностей. Точная конструкция катушки или катушек зависит от типа выполняемого МРТ-исследования.
Градиентные катушки 104 соединены с блоком управления градиентными катушками 102. Блок управления градиентными катушками 102 содержит управляемый источник тока. Когда на градиентные катушки подают энергию, протекающий через них ток вызывает возмущения магнитного поля внутри отверстия магнита. Это возмущение поля можно использовать или для повышения однородности поля B0 или для преднамеренного создания градиентов в магнитном поле. Примером является использование градиента магнитного поля, чтобы вызвать пространственное кодирование частоты, на которой ядерные спины колеблются в поле B0. Магнит соединен с блоком управления магнитом 106. Блок управления магнитом предназначен для управления и мониторинга состояния магнита.
Приемопередающая катушка 116 соединена с блоком управления РЧ приемопередающей катушкой. Этот блок управления содержит РЧ-генератор или генераторы, допускающие управление фазой и амплитудой РЧ-сигнала, приложенного к приемопередающей катушке.
Блок управления градиентом 102, блок управления магнитом 106 и блок управления приемопередающей катушкой 114 соединены с аппаратным интерфейсом 122 системы управления 120. Эта система управления управляет функцией МРТ-сканера 100. Система управления 120 содержит аппаратный интерфейс 122 и пользовательский интерфейс 126, соединенные с микропроцессором 124. Вариантом осуществления изобретения является микропроцессор 124, который предоставляет собой компьютерную систему. Аппаратный интерфейс 122 позволяет микропроцессору 124 посылать команды и получать информацию от блока управления градиентом 102, блока управления магнитом 106 и блока управления РЧ-приемопередатчиком 114. Пользовательский интерфейс 126 позволяет оператору управлять работой системы МРТ и позволяет отображать МРТ-изображения. Для автоматизации управления системой МРТ 100 и анализа данных МРТ для создания МРТ-изображений микропроцессор использует компьютерный программный продукт 128. Компьютерный программный продукт содержит модули программного обеспечения: модуль трехмерного объема 130, модуль определения контуров 132, модуль анатомических ориентиров 134, первый модуль сегментирования 136 и второй модуль сегментирования 138.
Пользовательский интерфейс 126 имеет диалоговое окно 170, которое выполнено так, что оператор имеет возможность просматривать данные планирования в графической форме. Это диалоговое окно 170 содержит область графического отображения данных планирования 180 и область 172, которая позволяет оператору одобрять данные планирования или отклонять данные планирования. Область для отображения данных планирования 180 выполнена с возможностью отображения МРТ-изображения 182 и данных планирования МРТ 184 в графической форме. Область для одобрения или отклонения данных планирования 172 содержит несколько кнопок. Одна кнопка 174 принимает данные планирования. Затем варианты осуществления устройства продолжают получать клинические МРТ-изображения. Другая кнопка 176 повторно запускает процесс планирования устройства и предлагает новый набор данных планирования. Третья кнопка 178 позволяет оператору вручную корректировать данные планирования и способна корректировать объем или объемы, представляющие интерес.
На фиг.2 показан вариант осуществления способа осуществления изобретения. Сначала получают многократное двухмерное изображение 200. Многократное двухмерное изображение состоит из стеков срезов в осевой, сагиттальной и коронарной плоскости. При МРТ-исследовании сердца многократное двухмерное изображение состоит из 20 осевых срезов, 20 коронарных срезов и 20 сагиттальных срезов. Используя линейную интерполяцию, многократное двухмерное изображение используют для создания трехмерного объема 202. Затем для определения контуров в трехмерном объеме используют алгоритм определения контуров 204. Оператор Собеля применяют вдоль каждой координатной оси трехмерного объема. Другими словами, оператор Собеля применяют по направлениям x, y и z, где координатные оси трехмерного объема обозначены x, y, и z. В идеале оси x, y и z совмещают с осями МРТ-сканера. Применение оператора Собеля по каждому из этих направлений дает вектор трехмерного градиента.
Оператор Собеля эффективен при определении контуров и не требует значительных вычислений. Оператор Собеля может определять контуры в конкретных плоскостях. Контуры в различных плоскостях соединяют вместе, используя кластеризацию. То есть местоположение контуров определяют, используя анализ связанных компонент. Анализ связанных компонент идентифицирует поверхности контакта с анатомической структурой пациента и идентифицирует анатомические ориентиры 206. Это работает посредством определения соседей вокруг каждого вокселя, которые преодолевают пороги чувствительности фильтра Собеля. Соседей определяют как область смежных вокселей в пределах определенного расстояния до вокселя, которые преодолевают пороги чувствительности. Кластеры формируют из групп взаимосвязанных соседей. Затем каждый кластер оценивают согласно его размеру и местоположению внутри трехмерного объема. Затем кластер с наивысшей оценкой идентифицируют в качестве анатомического контура. Анатомический контур представляет собой поверхность, которая определяет местоположение или границы анатомического признака. Примерами анатомических контуров являются диафрагма, правая стенка перикарда или левая стенка перикарда. Затем из идентифицированных анатомических признаков получают набор анатомических ориентиров. Эти анатомические ориентиры идентифицируют из кластерных характеристик, таких как центр, эксцентричность, ограничивающий прямоугольник, глобальные экстремумы и локальные экстремумы. Главным образом, эти анатомические ориентиры используют для начального размещения деформируемых моделей с ограниченной формой.
После начального размещения деформируемой модели с ограниченной формой, выполняют сегментирование трехмерного объема 208. Сегментирование определяют как разделение объема на различные сегменты, которые представляют признаки анатомической структуры пациента. Модуль сегментирования подгоняет деформируемую модель с ограниченной формой к набору характерных точек. Характерные точки вычисляют с использованием как модели, так и данных изображения, используя алгоритм выявления характерных точек. Соответствующие точки на модели итеративно подгоняют к характерным точкам. После того, как модуль сегментирования скорректировал местоположение сеток, второй набор ориентиров выделяют из сетки и/или модели. Затем модуль распознавания шаблонов использует второй набор анатомических ориентиров для выполнения планирования. Также модуль распознавания шаблонов может использовать начальный набор анатомических ориентиров. Анализ связанных компонент идентифицирует начальное местоположение трехмерных сеток внутри трехмерного объема. Затем модуль сегментирования корректирует местоположение трехмерной сетки. Второй и набор анатомических ориентиров выделяют из сочетания сетки и/или модели. Затем модуль распознавания шаблонов использует второй набор анатомических ориентиров для выполнения планирования. Также модуль распознавания шаблонов может использовать начальный набор анатомических ориентиров. Анализ связанных компонент идентифицирует начальное местоположение трехмерных сеток внутри трехмерного объема. Затем модуль сегментирования корректирует местоположение трехмерных сеток. Второй и набор анатомических ориентиров выделяют из сочетания сетки и модели. Используя второй набор анатомических ориентиров, посредством первого модуля распознавания шаблонов 210 определяют различные объемы, представляющие интерес.
Первый модуль распознавания шаблонов можно воплотить в виде обучаемого модуля. Модуль обучают с использованием обучающих изображений. После определения объемов, представляющих интерес, в объеме, представляющем интерес, получают предварительные МРТ-изображения 212. Во многих случаях будет определен более чем один объем, представляющий интерес, и эти дополнительные объемы или также будут визуализированы или к ним применят один из множества способов МРТ, которые уже описаны. Затем осуществляют сегментирование предварительных МРТ-изображений, используя второй модуль сегментирования 214. Анатомические ориентиры выделяют из трехмерных сеток, которые являются результатом сегментирования. Затем второй модуль распознавания шаблонов использует эти анатомические ориентиры для планирования клинического МРТ-изображения 216. Наконец, получают клинические МРТ-изображения 218.
На фиг.3 показаны две группы изображений 302, 304, 306, 308, 310, 312.
В верхнем ряду изображений 302, 306, 310 представлена коронарная плоскость, проходящая через сердце. Сердце, покоящееся на диафрагме, видно в верхнем ряду на изображениях 302, 306, 310. Вертикальная линия 314, показанная в верхнем ряду на изображениях 302, 306, 310, показывает положение сагиттального среза, показанного в нижнем ряду на изображениях 304, 308, 312. В нижнем ряду на изображениях 304, 308, 312 показан срединный сагиттальный срез, показывающий диафрагму. Диафрагма и легкие видны на этих изображениях. Вертикальная линия 316 в нижнем ряду на изображениях 304, 308, 312 показывает местоположение коронарного среза, показанного в верхнем ряду на изображениях 302, 306, 310.
Изображения 302 и 304 показывают начальное МРТ-изображение. Изображения 306 и 308 показывают изображение после применения оператора Собеля в вертикальном направлении.
Диафрагму идентифицируют на фиг.2 сначала посредством пороговой обработки модуля или длины вектора градиента. Пороговую обработку определяют как процесс маркировки отдельных пикселей в изображении в качестве пикселей объекта, если их значение выше конкретного порогового значения, и вычисляют скалярное произведение нормализованного градиента и предварительно определенного направления. Предварительно определенное направление совпадает с направлением оси z. Идентификация правой стенки перикарда не показано на фиг.2, но ее можно идентифицировать, используя тот же способ, за исключением того, что предварительно определенное направление представляет собой направление оси x. Подобным образом, левую стенку перикарда идентифицируют, используя предварительно определенное направление, которое лежит в наклонной плоскости x-z. Определения контура в наклонной плоскости x-z достигают посредством взвешивания x и z вокселей в соответствии с наклоном. Например, если желаемое направление представляет собой (x=0,5, z=0,866), то при взвешивании используют эти числа в качестве весов.
Светлые пиксели 318, показанные на изображениях 306, 308, 310 и 312, показывают места, где модуль вектора градиента выше конкретного значения и скалярное произведение направления оси z и нормализованного градиента выше второго значения. Изображения 310 и 312 показывают местоположение сетки 320 после определения ее положения с использованием первого модуля сегментирования. На изображениях 310 и 312 показана одна и та же сетка 320, но на различных срезах. Начальное положение сетки определяют, используя кластеризацию связных компонент. Это представляет собой вариант осуществления модуля анатомических ориентиров. Затем начальное положение сетки используют посредством варианта осуществления первого модуля сегментирования для корректировки положения сетки. На изображениях видны светлые пиксели 318, которые не расположены около сетки. Эти светлые пиксели не принадлежат к кластеру с наивысшей оценкой, как определяют посредством анализа связанных компонент, и, следовательно, не учитываются. Изображения, представленные на фиг.3, показывают только положение в направлении оси z. В этом варианте осуществления изобретения процесс повторяют в направлении оси x для того, чтобы расположить деформируемую модель с ограниченной формой на правой стенке перикарда, и в наклонной плоскости x-z для того, чтобы расположить деформируемую модель с ограниченной формой на левой стенке перикарда.
Фиг.4 используют для иллюстрации примера варианта осуществления изобретения. На фиг.4 показаны местоположения объемов, представляющих интерес, которые поместили с помощью первого модуля распознавания шаблонов 140. На этой фигуре показано местоположение регулировочного объема 402, объема стека 404 и объема направляющего пучка 406. В некоторых МРТ-исследованиях используют последовательных подход для планирования клинического МРТ-изображения. Например, в исследованиях сердца для автоматического планирования диагностических сканирований необходимы два осмотровых изображения. Первое МРТ-сканирование представляет собой многократный двухмерный мультистековый осмотр организма с низким разрешением и его используют для определения местоположения сердца и диафрагмы. До завершения это занимает приблизительно 12 секунд. Получают многократное двухмерное МРТ-изображение. Второе МРТ-сканирование представляет собой трехмерный осмотр с высоким разрешением, которое планируют на сердце, используя информацию из первого исследования. Этот осмотр занимает приблизительно 60 секунд. Планирование этого осмотра показано на фиг.4. Проекция трехмерного объема на поверхность МРТ среза 400 показано рамкой, обозначенной 404. Рамка, обозначенная 402, показывает местоположение регулировочного объема. Рамка, обозначенная 406, представляет собой объем направляющего пучка. Направляющий пучок используют для определения положения диафрагмы, когда данные для конкретного МРТ-изображения получают и используют для компенсации влияния дыхания пациента. Трехмерный осмотр предоставляет информацию для планирования диагностических сканирований. Она включает такую информацию, как местоположение анатомических структур сердца и ориентация анатомических структур.
Сложно проводить МРТ-исследования сердца, а ручное планирование является сложным и требует временных затрат. Автоматическое последовательное планирование сканирования снизит время, необходимое для выполнения МРТ-исследования сердца. Другим применением, которое будет полезно при последовательном планировании сканирования, является визуализация на прилегающем движущемся столе. Примером визуализации на прилегающем движущемся столе будет сначала получение данных МРТ, пока пациент покоится на столе, который движется внутрь сканера МРТ-сканера. Стол останавливают, когда обнаруживают анатомическую структуру, представляющую интерес, (например, печень). Затем проводят автоматическое планирование МРТ-изображения с конкретной геометрией, используя программное обеспечение для распознавания шаблонов, и фокусируются на печени. Из этого второго осмотра можно получить информацию для планирования специализированного клинического МРТ-изображения. Визуализацию на движущемся столе можно использовать для любого органа брюшной полости.
Пример: усовершенствования COMBI
Подробно изложен пример того, как варианты осуществления изобретения можно интегрировать с визуализацией на непрерывно движущемся столе (COMBI) или с многопозиционной визуализацией, что предоставляет возможность последовательного планирования сканирования. Варианты осуществления могут автоматически и согласованно удовлетворять основным допущениям относительно расположения пациента для клинических МРТ-исследований. Последовательный подход к автоматическому планированию сканирования позволяет усовершенствовать последовательность действий, а также надежность, согласованность и качество получения клинических изображений.
Подготовка пациента является важной стадией в последовательности действий в каждом МРТ-исследовании. Наряду со многими другими обязанностями, оператор принимает решение о положении пациента (головой вперед или ногами вперед, пронированное или супинированное положение) и корректирует положение стола так, чтобы исследуемая анатомическая структура находилась в центральном чувствительном объеме магнита.
Для правильной корректировки стола оператор должен обладать глубоким знанием анатомии, а также знаниями о предварительных настойках, зависящих от местных условий и протокола. Устройство, называемое световой визир, показывает фиксированную исходную точку относительно центрального чувствительного объема системы МРТ и облегчает корректировку стола. Однако это также требует дополнительных знаний для правильного использования, чтобы согласовать положение пациента с рекомендациями протокола и анатомической структурой, подлежащей визуализации.
Выполнение текущего способа планирования сканирования зависит от правильного расположения пациента. Несмотря на то, что доступный способ планирования сканирования может иметь дело с анатомической вариабельностью, патологиями и вариабельностью положения, в нем все еще имеет место допущение о том, что определенные анатомические структуры находятся в ПН осмотра, в котором проводят распознавание анатомической структуры и планирование клинических объемов. Неправильное расположение пациента может вести к нарушению этого исходного допущения. Таким образом, можно вызвать нарушение автоматического планирования сканирования.
COMBI представляет собой способ визуализации для систем МРТ, который получает изображения в то время как стол, на котором расположен пациент, равномерно двигается. Таким образом, можно создать объемы изображений с очень большим ПН подобно уже существующим многопозиционным объемам изображений. Многопозиционный подход получает несколько объемов изображений различных областей, переходящих от одной позиции к следующей, так что все объемы вместе полностью покрывают ПН и в то же время имеют минимально возможное перекрытие.
В течение нескольких лет способ COMBI введен в действие с образцовыми применениями для визуализации всего тела (Aldefeld, В et al.: «Continuously moving table 3D MRI with lateral frequency-encoding direction», Magn. Reson. Med. 55(5)), 1210-1216, 2006, а также визуализации всего тела в сочетании с разделением воды и жира для оценки доли жира (Boernert, P et al.: «Whole-body 3D water/fat resolved continuously moving table imaging», J. Magn. Reson. Imag. 25(3), 660-665, 2007).
Таким образом, способность COMBI или многопозиционного подхода получать объемы изображений с чрезвычайно большим ПН является ключевым фактором, предоставляющим возможность усовершенствования последовательности действий, которые ясно показаны в последовательном подходе к способу автоматического планирования сканирования.
Используя COMBI или многопозиционный способ в основе подхода последовательного планирования сканирования, исходное допущение в осмотре относительно ПН можно автоматически и согласованно выполнить без вмешательства оператора. В частности, этот способ можно применять для визуализации печени, поскольку она является органом, положение, размер и форма которого не определяются снаружи пациента очевидным образом.
Вариант осуществления применения продолжают следующим образом:
Обычная подготовка с тем различием, что только выполняют только очень приблизительную корректировку стола. По сценарию, первый осмотр представляет собой осмотр всего тела, при котором не выполняют корректировку стола. В этом случае исходное допущение для первой стадии последовательного подхода состоит в том, что в центральном чувствительном объеме системы МРТ отсутствуют части тела пациента.
Способ COMBI или многопозиционную визуализацию выполняют вместе со специализированной последовательностью. Получают первый осмотр с очень большим ПН (например, все тело). Последовательность спланирована так, что она дает хороший контраст внутри области, в которой расположена анатомическая структура, подлежащая клинической визуализации (например, верхняя абдоминальная область).
a) В рамках первого осмотра, используя способы обработки изображений, определяют местоположение органа (например, печени) и окружающей его области и, таким образом, выделяют ориентиры. Показано, что обработку изображения для определения печени в осмотрах всего тела можно выполнять в реальном времени по отношению к скорости перемещения стола (Dries, S et al: «MR Travel to Scan Image Processing for Real-Time Liver Identification», Proc. ISMRM 16, стр. 3170, 2008 (в цитатах Dries)), так что осмотр можно прервать после определения органа, подлежащего клинической визуализации, и окружающей его области, таким образом, экономя время исследования.
b) Затем на основе выделенных ориентиров система МРТ автоматически планирует положение, ориентацию и протяженность второго осмотра, который сфокусирован на области анатомической структуры, которая подлежит клинической визуализации (например, верхняя абдоминальная область для визуализации печени).
Используя данные планирования из предыдущей стадии, проводят второй осмотр с использованием специализированной последовательности. Этот второй осмотр служит той же цели и, следовательно, обладает схожими характеристиками качества изображения, что и однократный осмотр, который проводят в стандартном подходе, где оператор изначально вручную корректирует положение стола.
a) Во втором осмотре, используя способы обработки изображений, проводят точное определение органа, подлежащего клинической визуализации (например, печени), и, таким образом, выделяют ориентиры.
b) Затем, основываясь на выделенных ориентирах, система МРТ автоматически планирует положение, ориентацию и протяженность клинических изображений.
Получают клинические изображения.
Описанный выше процесс обеспечивает усовершенствования МРТ-исследований в следующих отношениях:
Последовательность действий: Укорочена подготовка пациента, устранены ошибки оператора относительно расположения пациента или неправильного использования светового визира.
Согласованность/Надежность: усовершенствована согласованность положения во втором осмотре по сравнению с однократным осмотром вручную, и, таким образом, в этом осмотре также усовершенствована надежность способа автоматического планирования сканирования, поскольку автоматически удовлетворяются исходные допущения относительно ПН.
Качество: помимо вышеуказанных преимуществ, последовательный подход может принести дополнительную информацию об отличительных признаках пациента, таких как указания относительно ожидаемой реакции ткани для последующих последовательностей, которые должны быть получены. Это представляет собой средство для корректировки следующих последовательностей в отношении получения приемлемого контраста, что, таким образом, позволяет снизить вероятность необходимости повторения последовательности вследствие неприемлемого контраста или неправильного размещения.
Пример: Получение набора изображений дегенеративного межпозвоночного диска
В этом примере продемонстрирован вариант осуществления изобретения, в котором осуществляют автоматическое осмотровое сканирование, за которым затем следуют два последовательных, автоматически полученных клинических МРТ-изображения. Первое клиническое МРТ-изображение используют для планирования второго клинического МРТ-изображения. В этом применении подробно показано полностью автоматическое получение изображения дегенеративных межпозвоночных дисков. Например, диски могут находиться в нижнем отделе позвоночника. Это имеет клиническое значение, поскольку это нарушение может быть причиной многих проблем, например, от боли в нижней части спины до полной грыжи. В результате роста популяции пожилых людей и людей с избыточным весом, этот тип исследования приобретает большее значение. Один или несколько дисков могут содержать патологические изменения и они могут располагаться в любой части позвоночного столба.
Классический способ получения клинических изображений с использованием МРТ включает несколько стадий. Сначала выполняют осмотровое сканирование. Используя это сканирование, оператор вручную помещает несколько геометрических элементов и получает сагиттальное T2 изображение с высоким разрешением. По этому изображению оператор идентифицирует дегенеративные диски (если они присутствуют). Это рассчитано на экспертную оценку оператора и внимание во время сканирования. Если оператор отвлекся, то патологию можно упустить. Возможно, в некоторых случаях радиолог должен точно определить дополнительную визуализацию. Это нарушает расписание врача и последовательность операций. Затем вручную планируют каждый выбранный диск и получают клиническое осевое T2 изображение с высоким разрешением, содержащее диски (в стеках). В свою очередь, для трехмерного получения предпочтительны несколько стеков для того, чтобы добиться оптимального разрешения при правильном угловом смещении для каждого диска, однако каждый стек требует дополнительного времени для сканирования. Следовательно, обычно получают стеки только для дисков, в которых проявляются патологические изменения.
Автоматическое последовательное планирование может облегчить оператору задачу планирования нескольких геометрических элементов, выбор подобласти позвоночника, выбор межпозвоночных дисков, представляющих клинический интерес, и получение их изображения в правильной ориентации.
Способ состоит из 5 стадий, из которых три представляют собой получение МРТ-изображений, а две представляют собой стадии обработки. Каждую стадию обработки используют для автоматического выделения информации из предыдущего полученного изображения, так что это позволяет автоматически выполнять следующее получение с использованием клинически значимых геометрических элементов и ориентаций.
В деталях вариант осуществления способа состоит из следующего:
Получение МРТ-изображения большого ПН с низким разрешением для всего позвоночника. Это может представлять собой многопозиционное получения, при котором две позиции автоматически «склеиваются» вместе. В основном, для экономии времени это получение будет представлять собой получение осмотрового типа с низким пространственным разрешением. Однако осмотр содержит достаточно информации для автоматического выделения значимых признаков с помощью компьютера, используя которые можно планировать следующее сканирование автоматически.
Определение местоположения межпозвоночных дисков с использованием алгоритма обработки, который выполнен с возможностью приблизительного определения местоположения межпозвоночных дисков, их аннотирования и определения местоположения ориентиров на межпозвоночных дисках. Используя второй алгоритм, набор ориентиров подгоняют к базе данных ориентиров и геометрических элементов и по этому сопоставлению можно вычислить предпочтительную ориентацию геометрии позвоночника в этом случае. Теперь для каждого межпозвоночного диска или поднабора дисков можно вычислить предпочтительную геометрическую структуру. Этот тип обработки описан в литературе (International Society for Magnetic Resonance in Medicine 2008, Medical Image Computing and Computer-Assisted Intervention 2007).
Получение сагиттального T2 изображения с высоким разрешением, используя вычисленные геометрические элементы позвоночника со стадии B. Это выполняют автоматически на основании клинически значимой области. Например, люмбальный отдел позвоночника, содержащий L1-L5. Это изображение можно использовать для клинического осмотра. Однако также его можно использовать в качестве «осмотра» для компьютерного алгоритма, который оценивает, являются ли межпозвоночные диски между T12 и S1 дегенеративными или нет. Более конкретно, алгоритм может состоять из алгоритма сегментирования, который оценивает поверхность каждого межпозвоночного диска. Затем, используя критерий, основанный на форме и/или контрасте сигнала, для каждого диска можно принять решение о том, является ли он дегенеративным или нет. Алгоритмы сегментации позвоночника хорошо известны (см., например, Medical Image Computing and Computer-Assisted Intervention 2008) и их можно легко распространить на межпозвоночные диски. В особенности, поскольку положение и приблизительная ориентация каждого диска уже известны из стадии B. Полезные ссылки:
Violas, E. Estivalezes, J. Briot, J. Sales de Gauzy, P. Swider, Magn. Reson. Imaging, 25, стр. 386-391, Jill P.G. Urban, С Peter Winlove, J. Mag. Reson. Imaging, 25 стр. 419-432 (2007), и
M. S, Saifuddin A. Clin Radiol., 54, стр. 703-23 (1999).
Получение стека изображений для каждого диска. Когда известно, какие межпозвоночные диски являются дегенеративными, можно установить получение, содержащее стек изображений для каждого диска. Поскольку известна предпочтительная ориентация каждого диска, это можно принимать во внимание. Каждый стек представляет собой клинически значимое изображение дегенеративного диска.
Пример: Клиническая визуализация запястья
В этом примере продемонстрирован вариант осуществления изобретения, в котором выполняют два последовательных автоматических осмотровых сканирования и используют их для автоматического планирования получения клинических МРТ-изображений. В этом примере подробно показано полностью автоматическое получение клинических МРТ-изображений запястья. Это имеет клиническое значение, поскольку расположение запястья с использованием светового визира требует времени и подвержено ошибкам. В связи с этими трудностями первый осмотр часто получают только для определения местоположения запястья. Затем получают второй осмотр, нацеленный на область запястья, который используют для реального планирования клинических изображений.
Автоматическое последовательное планирование облегчает оператору задачу ручной фокусировки для правильного определения местоположения запястью и планирования последующего клинического изображения. Для определения местоположения запястья проводят автоматическую обработку первого осмотра. Затем используют второй сфокусированный осмотр для планирования первых клинических изображений.
В деталях вариант осуществления способа состоит из следующего:
Получение первого осмотрового сканирования области запястья. Это представляет собой осмотровое сканирование с большим полем наблюдения.
Обработка первого осмотрового сканирования для того, чтобы определить местоположение запястья. Это можно выполнить, используя операцию маскирования для того, чтобы определить местоположение анатомической структуры или провести более специализированную обработку, которая уже выявляет детали анатомической структуры.
Получение второго осмотра запястья с определенным местоположением.
Обработка второго осмотра для получения данных планирования для планирования клинического МРТ-изображения.
Получение клинического МРТ-изображения.
СПИСОК НОМЕРОВ ПОЗИЦИЙ
100 МРТ-сканер
102 Блок управления градиентными катушками
104 Градиентные катушки
106 Блок управления магнитом
108 Магнит
110 Опора пациента
112 Пациент
114 Блок управления РЧ приемопередающей катушкой
116 Приемопередающая катушка с фазированной решеткой
120 Система управления
122 Аппаратный интерфейс
124 Микропроцессор или компьютер
126 Пользовательский интерфейс
128 Компьютерный программный продукт
130 Модуль трехмерного объема
132 Модуль определения контуров
134 Модуль анатомических ориентиров
136 Первый модуль сегментирования
138 Второй модуль сегментирования
140 Первый модуль распознавания шаблонов
142 Второй модуль распознавания шаблонов
170 Диалоговое окно
172 Область выбора действия
174 Кнопка одобрения предложенных параметров сканирования
176 Кнопка повторного получения предложенных параметров сканирования
178 Кнопка, которая позволяет оператору корректировать параметры сканирования
180 Область отображения предложенных параметров сканирования
182 МРТ-изображение
184 Графический дисплей данных планирования
200 Получить многократное двухмерное изображение
202 Создать трехмерный объем
204 Определение контуров
206 Идентифицировать анатомические ориентиры
208 Сегментировать трехмерный объем
210 Определить объемы, представляющие интерес,
212 Получить предварительные МРТ-изображения
214 Сегментировать предварительные МРТ-изображения
216 Планировать клинические МРТ-изображения
218 Получить клинические МРТ-изображения
302 Коронарное МРТ-изображение, проходящее через сердце
304 Сагиттальное МРТ-изображение, на котором показана диафрагма
306 Изображение 302, обработанное оператором Собеля
308 Изображение 304, обработанное оператором Собеля
310 Изображение 306, показывающее конечное расположение сетки на диафрагме
312 Изображение 308, показывающее конечное расположение сетки на диафрагме
314 Местоположение сагиттальной плоскости, показанной на изображениях 304, 308 и 312
316 Местоположение коронарной плоскости, показанной на изображениях 302, 306 и 310
318 Светлый пиксель
320 Сетка
400 МРТ-изображение
402 Регулировочный объем
404 Осмотровый стек
406 Направляющий объем
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБЪЕДИНЕНИЯ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ | 2016 |
|
RU2614545C1 |
| ГРАФИЧЕСКИЙ ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС ДЛЯ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ | 2013 |
|
RU2634636C2 |
| ТРЕХМЕРНАЯ ЛОКАЛИЗАЦИЯ ДВИЖУЩЕЙСЯ МИШЕНИ ДЛЯ АДАПТИВНОЙ РАДИАЦИОННОЙ ТЕРАПИИ | 2016 |
|
RU2699052C2 |
| СЕГМЕНТАЦИЯ ТКАНЕЙ ЧЕЛОВЕКА НА КОМПЬЮТЕРНОМ ИЗОБРАЖЕНИИ | 2017 |
|
RU2654199C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УЛЬТРАЗВУКОВОЙ ТЕРАПИИ | 2009 |
|
RU2519378C2 |
| СИСТЕМА И СПОСОБ ЭЛАСТОГРАФИЧЕСКИХ ИЗМЕРЕНИЙ | 2014 |
|
RU2667617C2 |
| АВТОМАТИЗИРОВАННОЕ ОКОНТУРИВАНИЕ АНАТОМИИ ДЛЯ ПЛАНИРОВАНИЯ ТЕРАПИИ С УПРАВЛЕНИЕМ ПО ИЗОБРАЖЕНИЯМ | 2010 |
|
RU2541887C2 |
| СИСТЕМА И СПОСОБ ДИАГНОСТИКИ ТАЗОБЕДРЕННЫХ СУСТАВОВ | 2022 |
|
RU2801420C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ДИАГНОСТИКИ ТАЗОБЕДРЕННЫХ СУСТАВОВ | 2022 |
|
RU2795658C1 |
| Способ подготовки и выполнения хирургической операции на органах малого таза | 2020 |
|
RU2736800C1 |

Изобретение относится к области автоматического получения данных клинических МРТ-изображений. Техническим результатом является обеспечение быстрого и точного планирования диагностических сканирований. Способ содержит: получение первого осмотрового изображения с первым полем наблюдения, первое осмотровое изображение имеет первое пространственное разрешение, определение местоположения первой области, представляющей интерес, и по меньшей мере одного анатомического ориентира в первом осмотровом изображении, стадия содержит: создание трехмерного объема (202), определение (132) набора контуров (204) в трехмерном объеме, идентификацию одного или нескольких анатомических ориентиров (206) в трехмерном объеме, автоматическое сегментирование трехмерного объема (208); определение положения и ориентации первой области, представляющей интерес, используя анатомический ориентир, положение и ориентацию первой области используют для планирования второго осмотрового изображения; получение второго осмотрового изображения со вторым полем наблюдения, второе осмотровое изображение имеет второе пространственное разрешение, второе пространственное разрешение выше, чем первое пространственное разрешение; создание планирования геометрии для анатомической области, представляющей интерес, используя второе осмотровое изображение; и получение диагностического изображения анатомической области, представляющей интерес, используя планирование геометрии. 3 н. и 12 з.п. ф-лы, 4 ил.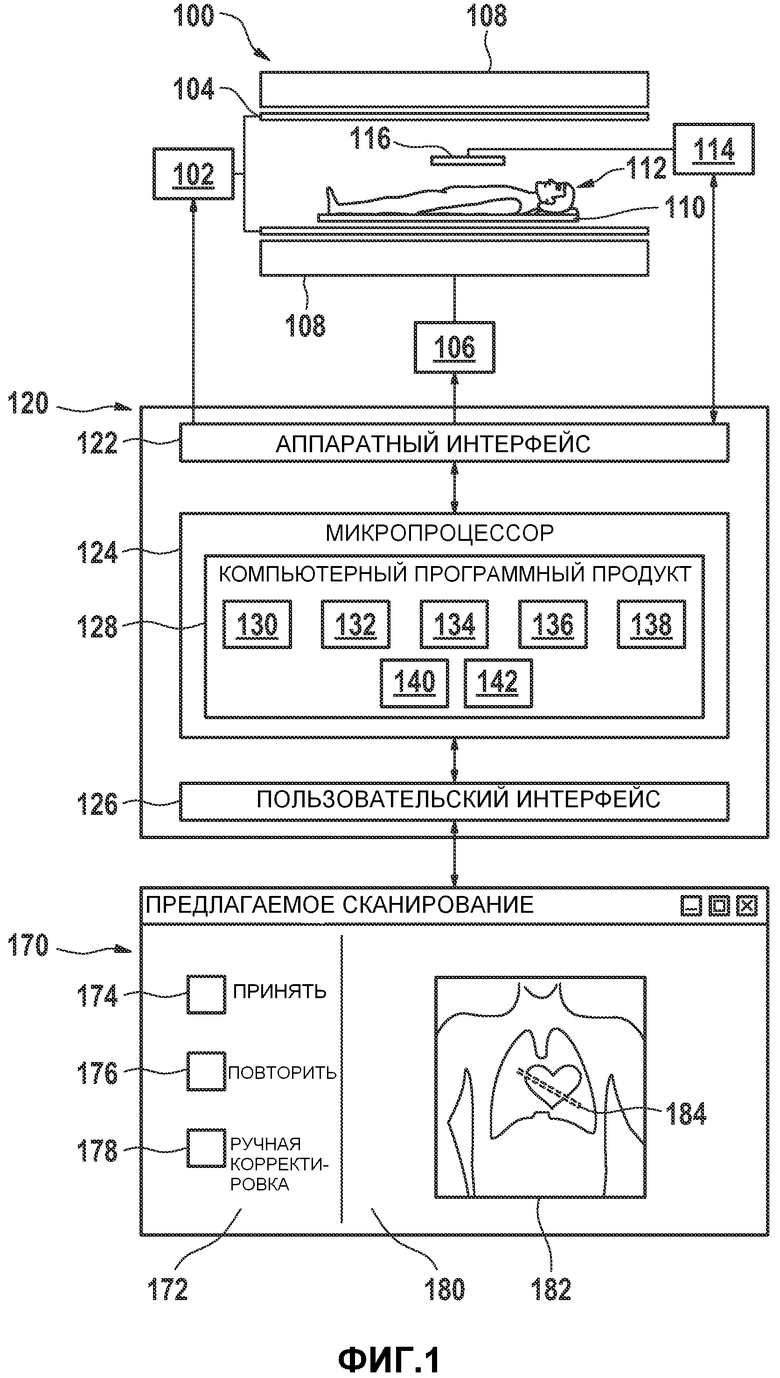
1. Способ получения по меньшей мере одного клинического МРТ-изображения субъекта, который содержит следующие стадии:
- получение первого осмотрового изображения с первым полем наблюдения, первое осмотровое изображение имеет первое пространственное разрешение, причем стадия получения первого осмотрового изображения с первым полем наблюдения содержит получение многократного двухмерного МРТ-изображения (200) субъекта, используя набор предварительно выбранных параметров,
- определение местоположения первой области, представляющей интерес, и по меньшей мере одного анатомического ориентира в первом осмотровом изображении, причем стадия определения местоположения первой области, представляющей интерес, и по меньшей мере одного анатомического ориентира в первом осмотровом изображении содержит: создание трехмерного объема (202) из многократного двухмерного МРТ-изображения с использованием модуля трехмерного объема (130), определение (132) набора контуров (204) в трехмерном объеме с использованием модуля определения контуров, идентификацию одного или нескольких анатомических ориентиров (206) в трехмерном объеме с использованием модуля анатомических ориентиров (134), используя набор контуров, автоматическое сегментирование трехмерного объема (208) посредством использования одного или нескольких анатомических ориентиров для подгонки первой деформируемой модели с ограниченной формой с использованием первого модуля сегментирования (136);
- определение положения и ориентации первой области, представляющей интерес, используя анатомический ориентир, положение и ориентацию первой области используют для планирования второго осмотрового изображения;
- получение второго осмотрового изображения со вторым полем наблюдения, второе осмотровое изображение имеет второе пространственное разрешение, причем второе пространственное разрешение выше, чем первое пространственное разрешение;
- создание планирования геометрии для анатомической области, представляющей интерес, используя второе осмотровое изображение; и
- получение диагностического изображения анатомической области, представляющей интерес, используя планирование геометрии.
2. Способ по п.1, в котором стадия определения положения и ориентации первой области, представляющей интерес, с использованием анатомических ориентиров, содержит:
- определение объема, представляющего интерес, (210) внутри сегментированного трехмерного объема, необходимого для последующего получения данных МРТ с использованием первого модуля распознавания шаблонов (140),
и/или причем стадия получения второго осмотрового изображения со вторым полем наблюдения содержит:
- получение одного или нескольких предварительных МРТ-изображений (212) объема, представляющего интерес,
и/или причем стадия создания планирования геометрии для анатомической области, представляющей интерес, используя второе осмотровое изображение, содержит:
- сегментирование одного или нескольких предварительных МРТ-изображений (214) с использованием второй деформируемой модели с ограниченной формой, используя второй модуль сегментирования (138),
- создание набора данных планирования (216) для планирования клинического МРТ-изображения с использованием второго модуля распознавания шаблонов (142), используя сегментированное одно или несколько предварительных МРТ-изображений,
и/или причем стадия получения диагностического изображения анатомической области, представляющей интерес, используя планирование геометрии, содержит:
- получение одного или нескольких клинических МРТ-изображений (218), используя набор данных планирования.
3. Способ по п.2, в котором по меньшей мере одно из: многократного двухмерного изображения, трехмерного объема, набора контуров, одного или нескольких анатомических ориентиров, сегментированного трехмерного объема, объема, представляющего интерес, одного или нескольких предварительных МРТ-изображений и одного или нескольких предварительных сегментированных МРТ-изображений сохраняют в компьютерном запоминающем устройстве для повторного использования для создания второго набора данных планирования для планирования клинического МРТ-изображения.
4. Способ по п.2, в котором первый модуль распознавания шаблонов (140) и/или второй модуль распознавания шаблонов (142) представляют собой обученные модули распознавания шаблонов.
5. Способ по п.2, в котором модуль анатомического распознавания (134) представляет собой воплощение алгоритма идентификации характеристик.
6. Способ по любому из пп. 2-5, в котором первый модуль распознавания шаблонов (140) определяет несколько объемов, представляющих интерес, причем первый модуль распознавания шаблонов (140) относит каждый объем, представляющий интерес, к первому поднабору, второму поднабору или третьему поднабору, причем получают одно или несколько МРТ-изображений каждого элемента первого поднабора и каждого элемента третьего поднабора, причем к каждому элементу второго поднабора и каждому элементу третьего поднабора применяют способ МРТ, выбранный из группы, состоящей из: импульсов подготовки намагничивания, импульсов подавления жировой ткани, мечения артериальных спинов (ASL), способа регионального насыщения (REST), способа спектрального предварительного насыщения посредством восстановления инверсии (SPIR), инверсии, направляющего пучка, регулировки В1 и регулировки В0, и причем данные МРТ, полученные от всех объемов, представляющих интерес, использует второй модуль распознавания шаблонов (142) для создания данных планирования.
7. Компьютерное запоминающее устройство, содержащее компьютерный программный продукт (126), содержащий набор исполняемых компьютером инструкций для выполнения способа по любому из предшествующих пунктов формулы изобретения.
8. Устройство (100, 120) для получения клинических данных МРТ субъекта, которое содержит:
- средство для получения первого осмотрового изображения с первым полем наблюдения, первое осмотровое изображение имеет первое пространственное разрешение, причем средство для получения первого осмотрового изображения с первым полем наблюдения содержит средство для получения многократного двухмерного МРТ-изображения (100) субъекта, используя набор предварительно выбранных параметров;
- средство для определения местоположения первой области, представляющей интерес, и по меньшей мере одного анатомического ориентира в первом осмотровом изображении, причем средство для определения местоположения первой области, представляющей интерес, и по меньшей мере одного анатомического ориентира в первом осмотровом изображении содержит: средство для создания трехмерного объема (124, 128, 130) из многократного двухмерного МРТ-изображения с использованием модуля трехмерного объема (130), средство для определения набора контуров (124, 128, 132) в трехмерном объеме с использованием модуля определения контуров (132), средство для идентификации одного или нескольких анатомических ориентиров (124, 128, 134) в трехмерном объеме с использованием модуля анатомических ориентиров (134), средство для автоматического сегментирования изображения трехмерного объема (124, 128, 136) посредством использования одного или нескольких анатомических ориентиров для подгонки деформируемой модели с ограниченной формой, используя первый модуль сегментирования (136),
- средство для определения положения и ориентации первой области, представляющей интерес, используя анатомические ориентиры, положение и ориентацию первой области используют для планирования второго осмотрового изображения,
- средство для получения второго осмотрового изображения со вторым полем наблюдения, причем второе осмотровое изображение имеет второе пространственное разрешение, второе пространственное разрешение выше, чем первое пространственное разрешение,
- средство для создания планирования геометрии для анатомической области, представляющей интерес, с использованием второго осмотрового изображения, и
- средство для получения диагностического изображения анатомической области, представляющей интерес, с использованием планирования геометрии.
9. Устройство по п.8, в котором средство для определения положения и ориентации первой области, представляющей интерес, используя анатомические ориентиры, содержит:
- средство для идентификации одного или нескольких анатомических ориентиров (124, 128, 134) в трехмерном объеме с использованием модуля анатомических ориентиров (134),
- средство для автоматического сегментирования изображения трехмерного объема (124, 128, 136) посредством использования одного или нескольких анатомических ориентиров для подгонки деформируемой модели с ограниченной формой, используя первый модуль сегментирования (136),
- средство для определения объема, представляющего интерес, (124, 128, 140) внутри сегментированного трехмерного объема, необходимого для последующего получения данных МРТ с использованием первого модуля распознавания шаблонов (140)
и/или причем средство для получения второго осмотрового изображения со вторым полем наблюдения содержит:
- средство для получения одного или нескольких предварительных МРТ-изображений (100) объема, представляющего интерес,
и/или причем средство для создания планирования геометрии для анатомической области, представляющей интерес, с использованием второго осмотрового изображения содержит:
- средство для сегментирования одного или нескольких предварительных МРТ-изображений (124, 128, 138) с использованием деформируемой модели с ограниченной формой, используя второй модуль сегментирования (138),
- средство для создания набора данных планирования (124, 128, 142) для планирования клинического МРТ-изображения с использованием второго модуля распознавания шаблонов (142), используя сегментированное одно или несколько предварительных МРТ-изображений,
и/или причем средство для получения диагностического изображения анатомической области, представляющей интерес, с использованием планирования геометрии содержит:
- средство для получения одного или нескольких клинических МРТ-изображений (100), используя набор данных планирования.
10. Устройство (100, 120) по п.9, которое дополнительно выполнено с возможностью хранения по меньшей мере одного из: многократного двухмерного изображения, трехмерного объема, набора контуров, одного или нескольких анатомических ориентиров, сегментированного трехмерного объема, объема, представляющего интерес, одного или нескольких предварительных МРТ-изображений и одного или нескольких предварительных сегментированных МРТ-изображений сохраняют в компьютерном запоминающем устройстве для повторного использования для создания второго набора данных планирования для планирования клинического МРТ-изображения.
11. Устройство (100, 120) по п.9, в котором первый модуль распознавания шаблонов (140) и/или второй модуль распознавания шаблонов представляют собой обученные модули распознавания шаблонов.
12. Устройство (100, 120) по п.9, в котором модуль анатомического распознавания (134) представляет собой воплощение алгоритма идентификации характеристик.
13. Устройство (100, 120) по п.9, дополнительно содержащее пользовательский интерфейс (126, 170), который выполнен с возможностью отображения набора данных планирования в графической форме (182) перед получением клинического МРТ-сканирования, и причем пользовательский интерфейс (126, 170) содержит средство ввода для ввода выбора оператора, который состоит из: одобрения (174) или отклонения (176, 178) набора данных планирования, причем в случае одобрения выполняют получение одного или нескольких клинических МРТ-изображений, и причем в случае отклонения пользовательский интерфейс отображает набор отклоненных данных, причем отклоненные данные содержат по меньшей мере одно из: многократного двухмерного изображения, трехмерного объема, контуров, анатомических ориентиров, сегментированного трехмерного объема, объема, представляющего интерес, одного или нескольких предварительных МРТ-изображений и одного или нескольких предварительных сегментированных МРТ-изображений и набора данных планирования.
14. Устройство (100, 120) по п.13, в котором пользовательский интерфейс (126) выполнен с возможностью принимать ручную модификацию набора отклоненных данных, причем модифицированные отклоненные данные используют для создания модифицированного набора данных планирования, причем одно или несколько клинических МРТ-изображений получают с использованием модифицированного набора данных планирования.
15. Устройство (100, 120) по любому пп.9-14, в котором первый модуль распознавания шаблонов (140) выполнен с возможностью определения нескольких объемов, представляющих интерес, причем первый модуль распознавания шаблонов (140) выполнен с возможностью отнесения каждого объема, представляющего интерес, к первому поднабору, второму поднабору, или третьему поднабору, причем устройство (100, 120) выполнено с возможностью получения одного или нескольких МРТ-изображений каждого элемента первого поднабора и каждого элемента третьего поднабора, причем устройство выполнено с возможностью применения способа МРТ, выбранного из группы, состоящей из: импульсов подготовки намагничивания, импульсов подавления жировой ткани, мечения артериальных спинов (ASL), способа регионального насыщения (REST), способа спектрального предварительного насыщения посредством восстановления инверсии (SPIR), инверсии, направляющего пучка, регулировки В1 и регулировки В0 к каждому элементу второго поднабора и к каждому элементу третьего поднабора, и причем данные МРТ, полученные от всех объемов, представляющих интерес, использует второй модуль распознавания шаблонов (142) для создания данных планирования.
| US6574304 B1, 03.06.2003 | |||
| US20080146910 A1, 19.06.2008 | |||
| US6064208, 16.05.2000 | |||
| US20070081712 A1, 12.04.2007 | |||
| US5758646, 02.06.1998 | |||
| US20060155583 A1, 13.07.2006 | |||
| СПОСОБ КОМПЬЮТЕРНО-ТОМОГРАФИЧЕСКОЙ ДИАГНОСТИКИ АНОМАЛИЙ РАЗВИТИЯ ПЕЧЕНИ | 2005 |
|
RU2297793C2 |
| Лапчатый зажим для прикрепления глухого фланца к фланцам паровозных, паропроводных труб и арматурных частей при гидравлическом их испытании | 1926 |
|
SU9382A1 |

