Перекрестная ссылка на родственную заявку
[0001] Настоящая заявка является родственной для заявки с № 12475.0059-00000 в реестре поверенного, поданной 28 января 2015 года и озаглавленной "Three Dimensional Localization and Tracking for Adaptive Radiation Therapy", все содержание которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее раскрытие в целом относится к радиационной терапии или радиотерапии. Более конкретно, настоящее раскрытие относится к системам и способам для трехмерного отслеживания опухоли для использования в разработке плана лечения с помощью радиационной терапии для использования во время радиотерапии.
УРОВЕНЬ ТЕХНИКИ
[0003] Радиотерапию используют для лечения рака и других заболеваний в тканях млекопитающих (например, человека и животных). Одним из методов радиотерапии является гамма-нож, с помощью которого пациента облучают большим количеством низкоинтенсивных гамма-лучей, которые сходятся с высокой интенсивностью и высокой точностью в мишень (например, опухоль). В другом варианте осуществления радиотерапию предоставляют с использованием линейного ускорителя, посредством которого опухоль облучают частицами высокой энергии (например, электронами, протонами, ионами и тому подобными). Местоположением и дозой пучка излучения следует точно управлять для обеспечения получения опухолью назначенного излучения, и местоположение пучка должно быть таким, чтобы минимизировать повреждение окружающей здоровой ткани, часто называемой органом(ами) риска (OAR).
[0004] Пучок излучения может быть сформирован так, чтобы он соответствовал форме опухоли, например, с использованием многолепесткового коллиматора (например, многолепестковый коллиматор включает в себя несколько вольфрамовых лепестков, которые могут перемещаться независимо друг от друга для создания специальных форм пучка излучения). (Излучение называется "назначенным", поскольку врач предписывает заранее определенное количество излучения для опухоли и окружающих органов аналогично назначению лекарства).
[0005] Традиционно для каждого пациента план лечения с помощью радиационной терапии ("план лечения") может быть создан с использованием метода оптимизации на основании клинических и дозиметрических целей и ограничений (например, максимальной, минимальной и средней доз излучения для опухоли и жизненно важных органов). Процедура планирования лечения может включать в себя использование трехмерного изображения пациента для идентификации области мишени (например, опухоли) и для идентификации жизненно важных органов рядом с опухолью. Создание плана лечения может быть трудоемким процессом, причем планировщик пытается удовлетворить различные цели лечения или ограничения (например, цели в отношении гистограммы доза-объем (DVH)), принимая во внимание их индивидуальную важность (например, с помощью взвешивания), для того чтобы получить план лечения, который будет клинически приемлемым. Эта задача может представлять собой трудоемкий процесс проб и ошибок, который осложняется различными органами риска (OAR), поскольку по мере увеличения их количества (например, вплоть до тринадцати для лечения головы и шеи) увеличивается и сложность этого процесса. OAR, удаленные от опухоли, могут быть легко избавлены от излучения, тогда как избавление OAR, расположенных рядом или перекрывающих целевую опухоль, может оказаться трудным.
[0006] Компьютерная томографическая (КТ) визуализация традиционно служит первоначальным источником данных изображений для планирования лечения для радиационной терапии. Изображения КТ обеспечивают точное представление геометрии пациента, а значения КТ могут быть непосредственно преобразованы в электронные плотности (например, единицы Хаунсфилда) для расчета дозы излучения. Однако использование КТ приводит к тому, что пациент подвергается дополнительной дозе излучения. В дополнение к изображениям КТ в радиационной терапии можно использовать магнитно-резонансные томографические (МРТ) сканы благодаря их превосходному контрасту мягких тканей по сравнению с изображениями КТ. В МРТ отсутствует ионизирующее излучение, и ее можно использовать для захвата функциональной информации о человеческом теле, такой как метаболизм и функциональность тканей.
[0007] Для определения местоположения и отслеживания мишени (например, органа, опухоли и тому подобного) можно использовать системы визуализации, такие как компьютерная томография (КТ), флюороскопия и магнитно-резонансная томография (МРТ). Обычно используют МРТ, поскольку она обеспечивает отличный контраст мягких тканей без использования ионизирующего излучения, которое используется в КТ. Примером системы для радиотерапевтического лечения, интегрированной с системой визуализации, может быть МРТ-Linac, который может использовать трехмерные (3D) изображения мишени (например, опухоли). Аппарат МРТ в МРТ-Linac может предоставлять множество изображений, которые соответствуют частичной карте ядер водорода в тканях пациента. Изображения пациента могут быть получены в двухмерной (2D) плоскости или в 3D объеме. Поскольку органы и опухоли движутся в теле пациента, важна быстрая и точная 3D локализация мишени. Например, целевые орган или опухоль могут двигаться из-за различных типов движения(например, респираторного, сердечного, перистальтического или других типов движений пациента). Однако, 2D МР срезы обычно получают в конкретном местоположении тела пациента, и 2D МР срез может не включать в себя опухоль/мишень из-за движения целевого органа или опухоли. Следовательно требуется система и способ для получения целевой опухоли и отслеживания структуры и движения опухоли, чтобы получаемый 2D МР срез с точки зрения местоположения, ориентации и/или толщины включал в себя целевую опухоль, и она была видна на 2D МР срезах в клинических условиях.
[0008] Настоящий обзор представляет собой обзор некоторых из положений настоящей заявки и не предназначен для исключительного или исчерпывающего рассмотрения настоящего предмета. Дополнительная подробная информация о настоящем предмете содержится в подробном описании и прилагаемой формуле изобретения. Другие аспекты изобретения будут очевидны для специалистов в области техники после прочтения и понимания следующего подробного описания и просмотра чертежей, которые составляют его часть, причем каждый из них не должен приниматься в ограничивающем смысле. Объем настоящего изобретения определяется прилагаемой формулой изобретения и ее юридическими эквивалентами.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0009] Некоторые варианты осуществления настоящего раскрытия относятся к способу обработки медицинских изображений. Способ может быть реализован процессорным устройством, исполняющим множество исполняемых компьютером команд. Способ может быть реализован процессором для локализации мишени в трехмерном (3D) объеме и содержит: прием от устройства получения изображений медицинского 3D изображения, содержащего область интереса мишени; извлечение посредством процессора множества двухмерных (2D) срезов из 3D изображения; определение посредством процессора 2D патча для каждого 2D среза, причем 2D патч соответствует участку 2D среза, связанному с мишенью; и преобразование посредством процессора 2D патча в модель адаптивного фильтра для определения местоположения области интереса.
[0010] Некоторые варианты осуществления настоящего раскрытия относятся к системе обработки медицинских изображений. Система может отслеживать трехмерную (3D) мишень в объеме с использованием срезов двухмерной визуализации объема и содержит: процессор; и память, функционально связанную с процессором и содержащую выполняемые компьютером команды, которые при выполнении посредством процессора вынуждают процессор выполнять способ, содержащий: прием от устройства получения изображений медицинского 3D изображения 3D объема, содержащего область интереса мишени, причем 3D изображение сохраняется в памяти; извлечение посредством процессора множества двухмерных (2D) срезов из 3D изображения; определение посредством процессора 2D патча для каждого 2D среза, причем 2D патч соответствует участку 2D среза, связанному с мишенью; и преобразование посредством процессора 2D патча в модель адаптивного фильтра для определения местоположения области интереса.
[0011] Дополнительные цели и преимущества настоящего раскрытия частично будут изложены в нижеследующем подробном описании и частично будут очевидны из описания или могут быть изучены посредством осуществления настоящего раскрытия на практике. Цели и преимущества настоящего раскрытия будут реализованы и достигнуты с помощью элементов и комбинаций, подробно изложенных в прилагаемой формуле изобретения.
[0012] Следует понимать, что приведенное выше общее описание и нижеследующее подробное описание являются только иллюстративными и пояснительными и не ограничивают настоящее изобретение, приведенное в формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] На чертежах, которые не обязательно выполнены в масштабе, схожие цифры могут соответствовать схожим компонентам в разных представлениях. Схожие цифры, содержащие буквенные суффиксы или разные буквенные суффиксы, могут представлять разные экземпляры схожих компонентов. Чертежи иллюстрируют в общем, в качестве примера, но не в качестве ограничения, различные варианты осуществления и вместе с описанием и формулой изобретения служат для объяснения раскрытых вариантов осуществления. При необходимости на всех чертежах используются одинаковые ссылочные позиции для обозначения тех же или подобных деталей. Такие варианты осуществления являются демонстративными, и не предполагается, что они представляют собой исчерпывающие или исключительные варианты осуществления приспособлений, систем или способов настоящего изобретения.
[0014] Фиг. 1 иллюстрирует типичную радиотерапевтическую систему для локализации и отслеживания трехмерной мишени для радиационной терапии.
[0015] Фиг. 2 иллюстрирует радиотерапевтическое устройство, гамма-нож, используемое в радиотерапевтической системе в соответствии с фиг. 1.
[0016] Фиг. 3 иллюстрирует радиотерапевтическое устройство, линейный ускоритель, используемое в радиотерапевтической системе в соответствии с фиг. 1.
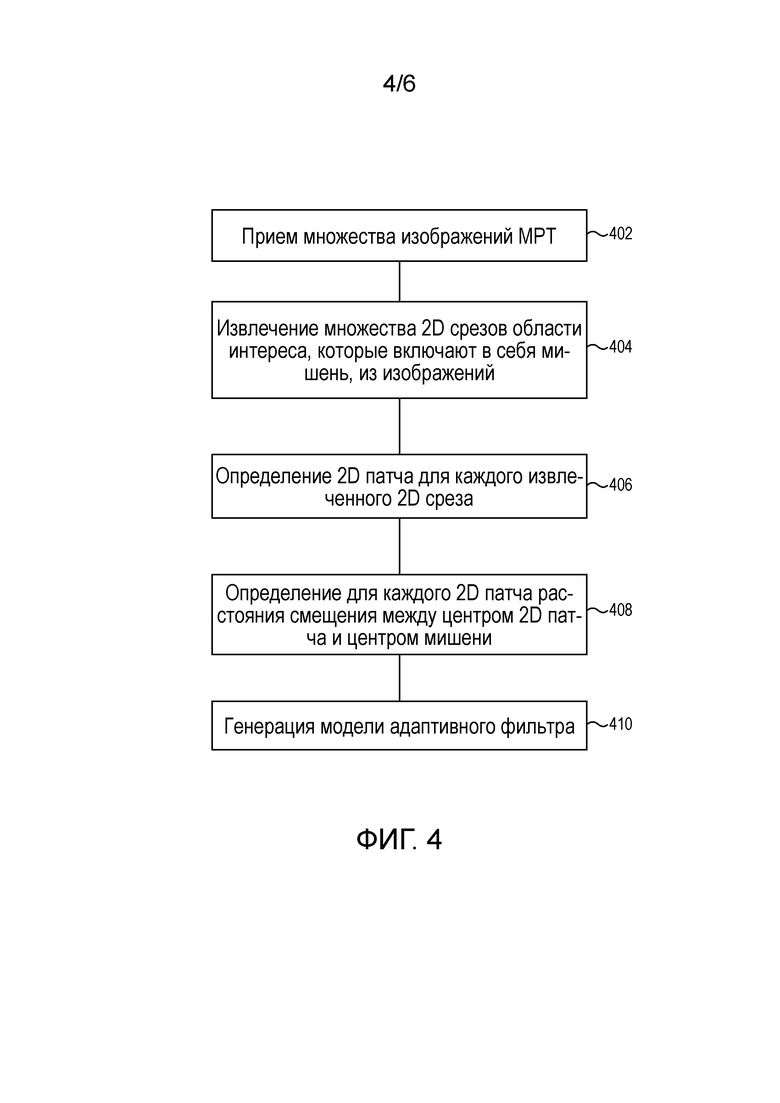
[0017] Фиг. 4 иллюстрирует типичную блок-схему для обучающего модуля для генерации модели адаптивного фильтра.
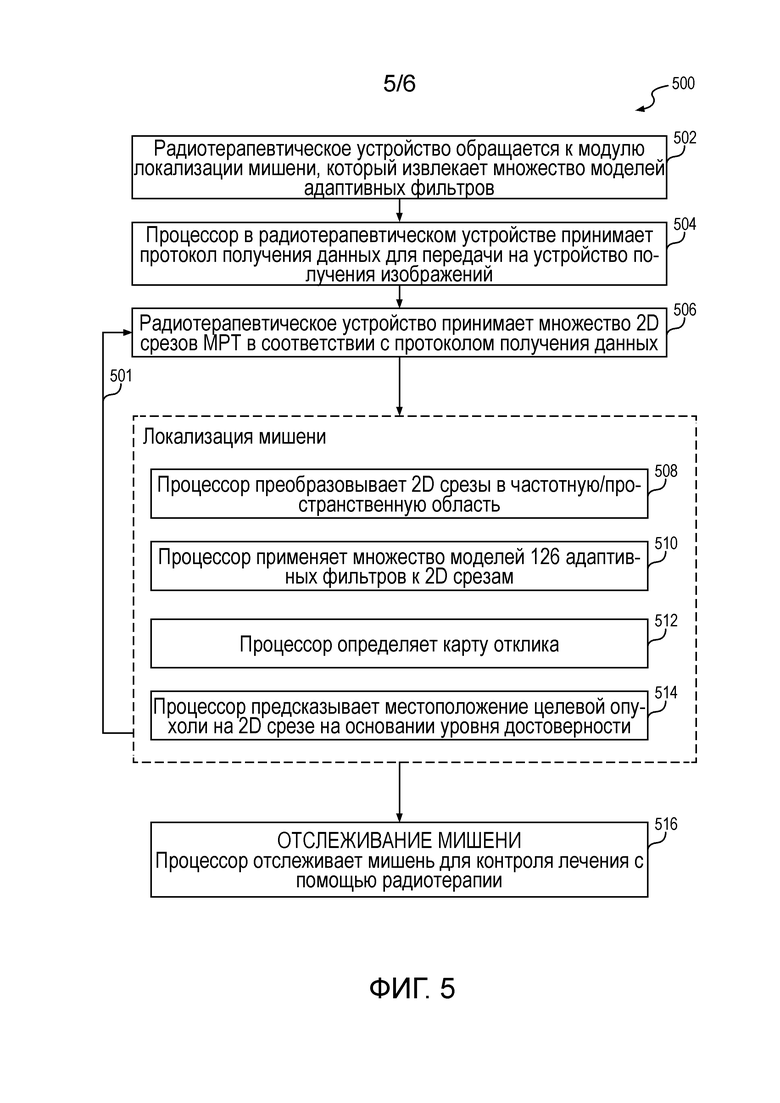
[0018] Фиг. 5 иллюстрирует типичную блок-схему для использования одного или нескольких обученных моделей адаптивных фильтров для локализации и отслеживания опухоли во время лучевого лечения пациента.
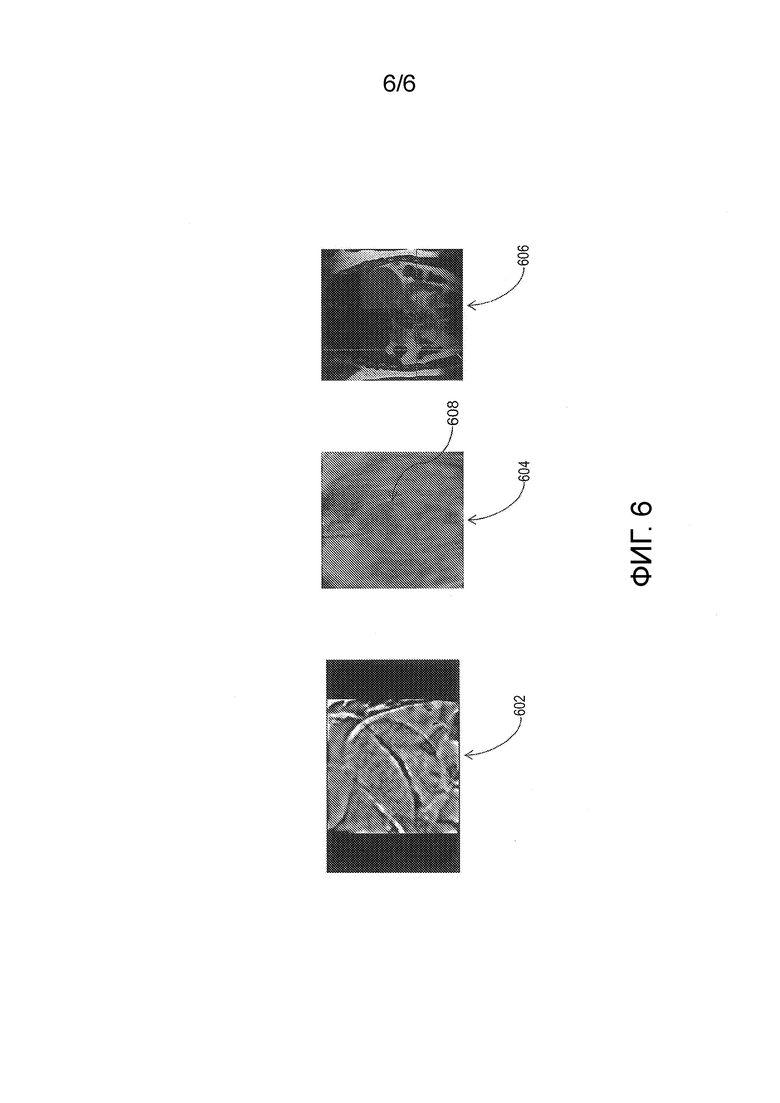
[0019] Фиг. 6 представляет собой графическую иллюстрацию модели адаптивного фильтра, карту отклика и изображение отслеживания мишени в пациенте.
ПОДРОБНОЕ ОПИСАНИЕ
[0020] В настоящем раскрытии предлагаются радиотерапевтическая система и соответствующий способ для локализации и отслеживания опухоли в анатомии пациента, подвергающегося лечению с помощью радиационной терапии. В частности, во время планирования лечения с помощью радиационной терапии получают множество 3D магнитно-резонансных изображений (МРТ) или 4D МРТ-изображений. Точное местоположение мишени, например опухоли, в анатомии пациента может быть определено радиотерапевтической системой с использованием методов сегментации, известных в области техники. После того, как местоположение опухоли определено, система может генерировать множество патчей и может определять смещение от центра патча к опухоли. Радиотерапевтическая система может использовать множество способов, таких как корреляция или использование методов модели внешнего вида, для улучшения выбранных признаков множества патчей, что приводит к множеству моделей адаптивных фильтров. Эти модели адаптивных фильтров радиотерапевтическая система может затем использовать во время фактического лечения пациента "онлайн".
[0021] Одним из преимуществ такого подхода является то, что целевую опухоль можно локализовывать и отслеживать во время радиотерапевтического лечения. Для опухоли типичны перемещения в пределах анатомии пациента из-за множества типов движения, таких как движение, вызываемое дыханием, сердечное движение, перистальтика, непроизвольное движение пациента (например, кашель, чиханье и т.д.), или произвольное движение, обусловленное тем, что пациент находится во время радиотерапии на процедурном столе. При использовании радиационной терапии под контролем МРТ доступны только 2D срезы изображений анатомии пациента. Этот подход позволяет определять, какие из 2D срезов содержат опухоль, и, кроме того, обеспечивает преимущество, состоящее в возможности отслеживания опухоли путем оценки потенциального будущего местоположения.
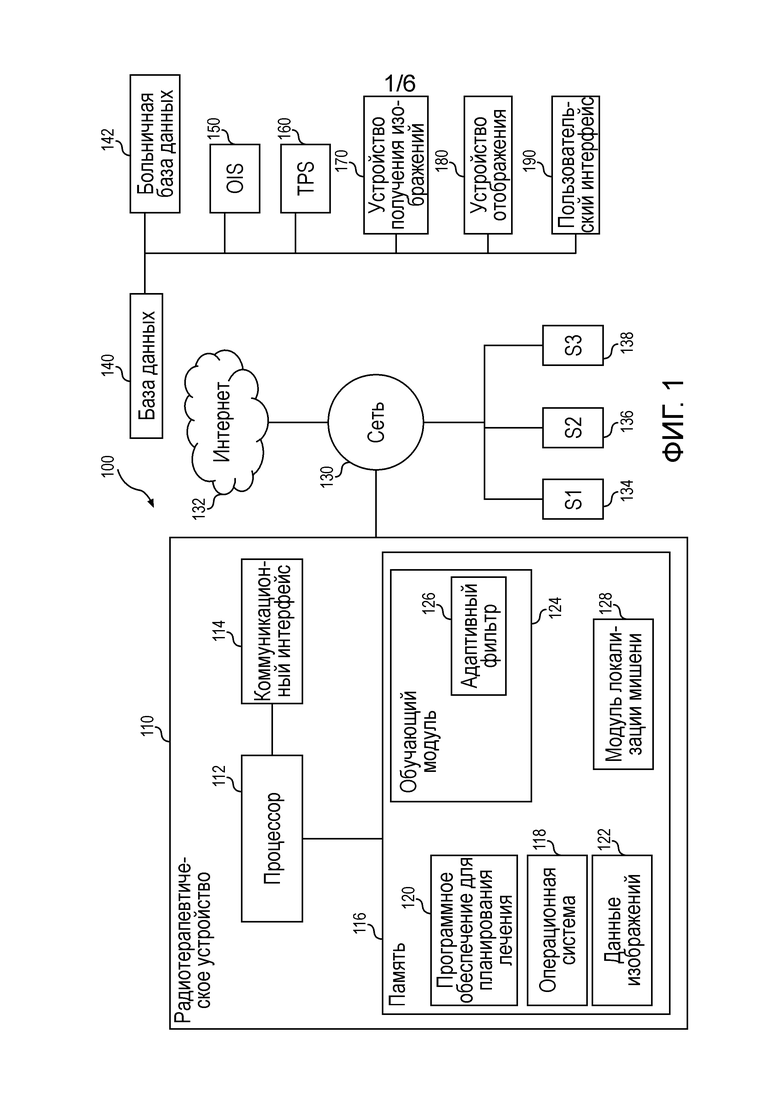
[0022] Фиг. 1 иллюстрирует типичную радиотерапевтическую систему 100 для осуществления локализации и отслеживания мишени во время лечения с помощью радиационной терапии. Радиотерапевтическая система 100 может включать в себя устройство 110 радиационной терапии, соединенное с сетью 120, которая соединена с интернетом 130. Сеть 120 может соединять устройство 110 радиационной терапии с базой 140 данных, больничной базой 142 данных, онкологической информационной системой (OIS) 150 (которая, например, может предоставлять информацию о пациенте), системой 160 планирования лечения (TPS) (например, для создания планов лечения с помощью радиационной терапии для использования радиотерапевтическим устройством 110), устройством 170 получения изображений, устройством 180 отображения и пользовательским интерфейсом 190.
[0023] Радиотерапевтическое устройство 110 может включать в себя процессор 112, запоминающее устройство 116 и коммуникационный интерфейс 114. Запоминающее устройство 116 может хранить выполняемые компьютером команды для операционной системы 118, программного обеспечения 120 для планирования лечения, обучающего модуля 124, который генерирует адаптивный фильтр 126, и модуля 120 локализации мишени и любые другие выполняемые компьютером команды для выполнения посредством процессора 240.
[0024] Процессор 112 может быть коммуникативно связан с запоминающим устройством 116, и процессор 112 может быть сконфигурирован для выполнения сохраненных на нем выполняемых компьютером команд. Например, процессор 112 может выполнять обучающий модуль 124 для реализации как функциональных возможностей обучающего модуля 124, так и функциональных возможностей модуля 128 локализации мишени, для того чтобы определять местоположение мишени в пациенте во время применения радиотерапии. Кроме того, процессор 112 может выполнять программное обеспечение 120 для планирования лечения (например, такое как программное обеспечение Monaco® производства Elekta), которое может взаимодействовать с обучающим модулем 124 и модулем 128 локализации мишени.
[0025] Процессор 112 может представлять собой устройство обработки, включающее в себя одно или несколько устройств обработки общего назначения, таких как микропроцессор, центральное процессорное устройство (CPU), графическое процессорное устройство (GPU), ускоренное процессорное устройство (APU) или тому подобное. Более конкретно, процессор 112 может представлять собой микропроцессор со сложным набором команд (CISC), микропроцессор с сокращенным набором команд (RISC), микропроцессор с командными словами очень большой длины (VLIW), процессор, реализующий другие наборы команд, или процессоры, реализующие комбинацию наборов команд. Процессор 112 может также представлять собой одно или несколько специализированных устройств обработки, таких как специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA), цифровой сигнальный процессор (DSP), система на чипе (SoC) или тому подобное. Как будет понятно специалистам в области техники, в некоторых вариантах осуществления процессор 112 может представлять собой специализированный процессор, а не процессор общего назначения. Процессор 112 может включать в себя одно или несколько известных устройств обработки, таких как микропроцессор из семейств Pentium™, Core™, Xeon™ или Itanium® производства Intel™, семейств Turion™, Athlon™, Sempron™, Opteron™, FX™, Phenom™ производства AMD™ или любой из различных процессоров производства Sun Microsystems. Процессор 112 может также включать в себя графические процессорные устройства, такие как GPU из семейств GeForce®, Quadro®, Tesla® производства Nvidia™, GMA, семейства Iris™ производства Intel™ или семейства Radeon™ производства AMD™. Процессор 112 может также включать в себя ускоренные процессорные устройства, такие как Desktop A-4(6,8) Series производства AMD™, семейство Xeon Phi™ производства Intel™. Раскрытые варианты осуществления не ограничены никаким типом процессора(ов), если он выполнен с возможностью удовлетворения вычислительных потребностей идентификации, анализа, хранения, генерации и/или предоставления больших объемов данных визуализации или обработки таких данных визуализации для локализации и отслеживания мишени или обработки данных любого другого типа, соответствующих раскрытым вариантам осуществления. Кроме того, термин "процессор" может включать в себя более чем один процессор, например многоядерную конструкцию или множество процессоров, каждый из которых имеет многоядерную конструкцию. Процессор 112 может исполнять последовательности команд компьютерной программы, сохраненные в памяти 116, для выполнения различных операций, процессов, способов, которые будут более подробно рассмотрены ниже.
[0026] Запоминающее устройство 116 может хранить данные 122 изображений (например, 3D МРТ, 4D МРТ, 2D срезы и т.д.), полученные от устройства 179 получения изображений, или данные/информацию любого другого типа в любом формате, который радиотерапевтическое устройство 110 может использовать для выполнения операций, соответствующих раскрытым вариантам осуществления. Запоминающее устройство 210 может включать в себя память, доступную только для чтения (ROM), флэш-память, память с произвольным доступом (RAM), динамическую память с произвольным доступом (DRAM), такую как синхронная DRAM (SDRAM) или Rambus DRAM, статическую память (например, флэш-память, статическую память с произвольным доступом) и т.д., на которой выполняемые компьютером команды хранятся в любом формате. Команды компьютерной программы могут быть доступны для процессора 112, считаны из ROM или любой другой подходящей области памяти и загружены в RAM для выполнения посредством процессора 112. Например, память 116 может хранить одну или несколько прикладных программ. Прикладные программы, сохраненные в памяти 116, могут включать в себя, например операционную систему 118 для обычных компьютерных систем, а также для программно-управляемых устройств. Кроме того, память 116 может хранить всю прикладную программу или только часть прикладной программы, которая может быть выполнена процессором 112. Например, запоминающее устройство 116 может хранить один или несколько планов лечения с помощью радиационной терапии, сгенерированных с помощью программного обеспечения 120 для планирования лечения системой 160 планирования лечения.
[0027] В некоторых вариантах осуществления запоминающее устройство 116 может включать в себя машиночитаемый носитель для хранения. Хотя машиночитаемый носитель для хранения в варианте осуществления может представлять собой один носитель, следует использовать термин "машиночитаемый носитель для хранения" как включающий в себя один носитель или множество носителей (например, централизованную или распределенную базу данных и/или соответствующие кэши и серверы), которые хранят один или несколько наборов выполняемых компьютером команд или данных. Термин "машиночитаемый носитель для хранения" следует использовать также как включающий в себя любой носитель, который способен хранить или кодировать набор команд для выполнения машиной, и который вынуждает машину выполнять любой один или несколько из способов настоящего раскрытия. Термин "машиночитаемый носитель для хранения" следует, соответственно использовать как включающий в себя, но без ограничения, твердотельную память, оптические и магнитные носители. Например, устройство 210 памяти/хранения может представлять собой один или несколько энергозависимых, долговременных или энергонезависимых материальных машиночитаемых носителей.
[0028] Радиотерапевтическое устройство 110 может связываться с сетью 130 через коммуникационный интерфейс 114, который коммуникативно связан с процессором 112 и памятью 116. Коммуникационный интерфейс 114 может включать в себя, например, сетевой адаптер, кабельный разъем, последовательный разъем, разъем USB, параллельный разъем, высокоскоростной адаптер передачи данных (например, такой как волокно, USB 3.0, Thunderbolt и тому подобное), беспроводной сетевой адаптер (например, такой как адаптер WiFi), телекоммуникационный адаптер (например, 3G, 4G/LTE и тому подобное) и тому подобное. Коммуникационный интерфейс 114 может включать в себя одно или несколько цифровых и/или аналоговых устройств связи, которые позволяют радиотерапевтическому устройству 110 связываться с другими машинами и устройствами, такими как удаленно расположенные компоненты, через сеть 130.
[0029] Сеть 130 может обеспечивать функциональность локальной сети (LAN), беспроводной сети, облачной вычислительной среды (например, программного обеспечения как услуги, платформы как услуги, инфраструктуры как услуги и т.д.), клиент-серверную, глобальной сети (WAN) и тому подобную. Следовательно, сеть 130 может обеспечивать передачу данных между радиотерапевтическим устройством 110 и рядом различных других систем и устройств, таких как, например: система 160 планирования лечения, онкологическая информационная система 150 и устройство 170 получения изображений. Дополнительно, данные, генерируемые системой 160 планирования лечения, OIS 150 и устройством 170 получения изображений, могут быть сохранены в памяти 116, базе 140 данных или больничной базе 142 данных. Данные могут быть, если требуется, переданы/приняты через сеть 130 посредством коммуникационного интерфейса 114 для доступа со стороны процессора 112.
[0030] Кроме того, сеть 130 может быть соединена с интернетом 132 для связи с серверами или клиентами, которые находятся удаленно и соединены с интернетом. Как описано, сеть 130 может включать в себя другие системы S1 (134), S2 (136), S3 (138). Системы S1, S2 и/или S3 могут быть идентичны системе 100 или могут представлять собой другие системы. В некоторых вариантах осуществления одна или несколько систем, соединенных с сетью 130, могут образовывать распределенную среду для вычислений/моделирования, которая совместно выполняет получение изображения, локализацию мишени и отслеживание мишени, а также другие аспекты предоставления радиотерапии пациенту.
[0031] Кроме того, радиотерапевтическая система 100 может связываться с базой 140 данных или больничной базой 142 данных для выполнения одной или нескольких программ, сохраненных удаленно. В качестве примера, база 140 данных, больничная база 142 данных или они обе могут включать в себя реляционные базы данных, такие как базы данных Oracle™, базы данных Sybase™ или другие, и могут включать в себя нереляционные базы данных, такие как файлы последовательностей Hadoop, HBase, Cassandra или другие. Такие удаленные программы могут включать, например, программное обеспечение онкологической информационной системы (OIS) или программное обеспечение для планирования лечения. Программное обеспечение OIS, например, может быть сохранено в больничной базе 142 данных, базе 140 данных или OIS 150. Программное обеспечение для планирования лечения, например, может быть сохранено в базе 140 данных, больничной базе 142 данных, системе 160 планирования лечения или OIS 150. Таким образом, например, радиотерапевтическое устройство 110 может связываться с больничной базой 142 данных для реализации функциональности онкологической информационной системы 150.
[0032] Системы и способы раскрытых вариантов осуществления при этом не ограничены отдельными базами данных. В одном аспекте радиотерапевтическая система 100 может включать в себя базу 220 данных или больничную базу 230 данных. В качестве альтернативы, база 220 данных и/или больничная база 230 данных могут быть расположены удаленно по отношению к радиотерапевтической системе 100. База 140 данных и больничная база 142 данных могут включать в себя вычислительные компоненты (например, систему управления базами данных, сервер баз данных и т.д.), выполненные с возможностью приема и обработки запросов для данных, сохраненных в запоминающих устройствах базы 140 данных или больничной базы 142 данных, и предоставления данных из базы 220 данных или больничной базы (баз) 230 данных. Специалисту в области техники будет понятно, что базы 140, 142 данных могут включать в себя множество устройств, расположенных или центральным, или распределенным образом.
[0033] Кроме того, радиотерапевтическое устройство 110 может связываться с базой 140 данных через сеть 130 для отправки/приема множества данных различных типов, сохраненных в базе 140 данных. Например, в некоторых вариантах осуществления база 140 данных может быть выполнена с возможностью хранения множества изображений (например, изображений 3D МРТ, 4D МРТ, 2D МРТ срезов, изображений КТ, изображений 2D флюороскопии, рентгеновских изображений, необработанных данных МР сканирований или КТ сканирований, данных в формате "Digital Imaging and Communications in Medicine" (DICOM) и т.д.) от устройства получения изображений 140. База 140 данных может хранить данные для использования модулем 128 локализации мишени, обучающим модулем 124 и программным обеспечением 120 для планирования лечения. Устройство 110 радиационной терапии может принимать данные визуализации (например, изображения 3D МРТ, изображения 4D МРТ) из базы данных 120 для генерации множества моделей адаптивных фильтров, как описано ниже.
[0034] Кроме того, радиотерапевтическая система 100 может включать в себя устройство 170 получения изображений, которое может получать медицинские изображения (например, изображения магнитно-резонансной томографии (МРТ), 3D МРТ, 2D потоковую МРТ, 4D объемную МРТ, изображения компьютерной томографии (КТ), конусно-лучевую КТ, изображения позитронной эмиссионной томографии (ПЭТ), изображения функциональной МРТ (например, фМРТ, МРТ-ДК и диффузионной МРТ), рентгеновские изображения, флюороскопическое изображение, ультразвуковые изображения, радиотерапевтические портальные изображения, изображения однофотонной эмиссионной компьютерной томографии (ОФЭКТ) и тому подобное) пациента. Устройство 170 получения изображений может, например, представлять собой устройство визуализации для МРТ, устройство визуализации для КТ, устройство визуализации для ПЭТ, ультразвуковое устройство, флюороскопическое устройство, устройство визуализации для ОФЭКТ или другое устройство медицинской визуализации для получения одного или нескольких медицинских изображений пациента. Изображения, получаемые с помощью устройства 170 получения изображений, могут быть сохранены в базе 140 данных в виде данных визуализации и/или данных исследования. В качестве примера, изображения, получаемые с помощью устройства 170 получения изображений, могут быть также сохранены радиотерапевтическим устройством 110 в памяти 116.
[0035] В варианте осуществления, например, устройство получения изображений 140 может быть интегрировано с радиотерапевтическим устройством 110 в виде одного аппарата (например, устройства МРТ, объединенного с линейным ускорителем, также называемого "МРТ-Linac", или интегрированного устройства МРТ, объединенного с гамма-ножом). Такой МРТ-Linac можно использовать, например, для определения местоположения целевого органа или целевой опухоли в пациенте, например для направления радиационной терапии в соответствии с планом лечения с помощью радиационной терапии на заранее определенную мишень.
[0036] Устройство 170 получения изображений может быть выполнено с возможностью получения одного или нескольких изображений анатомии пациента для области интереса (например, целевого органа, целевой опухоли или и того, и другого). Каждый 2D срез может иметь один или несколько параметров (например, толщину 2D среза, ориентацию и местоположение и т.д.). Один или несколько параметров могут быть отрегулированы с использованием процессора 112 для включения мишени. Например, выбранными признаками 2D среза можно манипулировать, например, посредством регулировки свойств градиента или РЧ колебаний. Например, положение среза можно изменять посредством изменения основной частоты РЧ импульса и поддержания одной и той же величины градиента. Кроме того, ориентацию среза можно изменять, например, с помощью отличающейся физически оси градиента (например, выбранный срез может быть ортогональным прикладываемому градиенту). В примере устройство 170 получения изображений (например, МРТ или МРТ-Linac) может получать 2D срез в любой ориентации. Например, ориентация 2D среза может включать сагиттальную ориентацию, корональную ориентацию или осевую ориентацию. Эти ориентации могут соответствовать градиенту магнитного поля (например, Gx, Gy или Gz, соответственно), связанного с МРТ или МРТ-Linac. Процессор 112 может регулировать параметр, такой как толщина 2D среза, так, чтобы он включал в себя целевой орган или целевую опухоль. В примере может быть вычислена и отрегулирована толщина среза, например с использованием уравнения 1:
[0037]  (Уравнение 1)
(Уравнение 1)
[0038] В уравнении 1 T может представлять собой толщину 2D среза, которую можно измерять, например, в единицах расстояния (например, миллиметрах). Δ может представлять собой ширину полосы возбуждения, соответствующей радиочастотному импульсу, прикладываемому на указанной частоте (например, в герцах, "Гц"). Буква γ может представлять собой константу, называемую гиромагнитным отношением (например, для протонов γ имеет значение 267,54 МГц/тесла).
может представлять собой ширину полосы возбуждения, соответствующей радиочастотному импульсу, прикладываемому на указанной частоте (например, в герцах, "Гц"). Буква γ может представлять собой константу, называемую гиромагнитным отношением (например, для протонов γ имеет значение 267,54 МГц/тесла).  может представлять собой градиент магнитного поля (например, измеренный в тесла/метр). В примере 2D срезы могут быть определены из такой информации, как объемная 3D МРТ. Такие 2D срезы могут быть получены устройством 170 получения изображений "в реальном времени", когда пациент подвергается лечению с помощью радиационной терапии, например при использовании устройства 110 радиационной терапии.
может представлять собой градиент магнитного поля (например, измеренный в тесла/метр). В примере 2D срезы могут быть определены из такой информации, как объемная 3D МРТ. Такие 2D срезы могут быть получены устройством 170 получения изображений "в реальном времени", когда пациент подвергается лечению с помощью радиационной терапии, например при использовании устройства 110 радиационной терапии.
[0039] Система 160 планирования лечения может генерировать и хранить планы лечения с помощью радиационной терапии для конкретного пациента, подлежащего лечению, планы лечения с помощью радиационной терапии для других пациентов, а также другую радиотерапевтическую информацию (например, углы пучка, информацию гистограммы доза-объем, количество пучков излучения для использования во время терапии, углы пучка, дозу на пучок и тому подобное). Например, система 160 планирования лечения может предоставлять информацию о конкретной дозе излучения, которая должна быть применена к пациенту, и другую связанную с радиотерапией информацию (например, тип терапии: такой как радиационная терапия (IGRT) под визуальным контролем, радиационная терапия с модулированной интенсивностью (IMRT), стереотаксическая радиотерапия; и тому подобное).
[0040] Генерирование плана лечения может включать в себя связь с устройством 170 получения изображений (например, устройством КТ, устройством МРТ, устройством ПЭТ, рентгеновским устройством, ультразвуковым устройством и т.д.) для получения доступа к изображениям пациента и для определения границ мишени, такой как опухоль. В некоторых вариантах осуществления может требоваться определение границ одного или нескольких органов риска (OAR), таких как здоровая ткань, окружающая опухоль или расположенная в непосредственной близости от опухоли. Поэтому, когда OAR расположен близко к целевой опухоли, может быть выполнена сегментация OAR. Кроме того, если целевая опухоль расположена близко к OAR (например, предстательная железа в непосредственной близости от мочевого пузыря и прямой кишки), при сегментации OAR система 160 планирования лечения может допускать исследование распределения дозы не только в мишени, но также в OAR.
[0041] Для того чтобы определить границы между целевым органом или целевой опухолью и OAR, устройством 170 получения изображений могут быть неинвазивно получены медицинские изображения, такие как изображения МРТ, изображения КТ, изображения ПЭТ, изображения фМРТ, рентгеновские изображения, ультразвуковые изображения, радиотерапевтические портальные изображения, изображения ОФЭКТ и тому подобное, пациента, подвергающегося радиотерапии, для выявления внутренней структуры части тела. На основании информации из медицинских изображений может быть получена 3D структура. Кроме того, в процессе планирования лечения могут быть учтены многие параметры для достижения баланса между эффективным лечением целевой опухоли (например, чтобы целевая опухоль получала достаточную для эффективной терапии дозу излучения) и низким облучением OAR (например, OAR получает настолько низкую дозу излучения, насколько возможно), местоположение целевого органа и целевой опухоли, местоположение OAR и движение мишени по отношению к OAR. Например, 3D структура может быть получена посредством определения контура мишени или определения контура OAR в пределах каждого 2D слоя или среза изображения МРТ или КТ и объединения контуров всех 2D слоев или срезов. Контур может быть сгенерирован вручную (например, врачом, дозиметристом или работником здравоохранения) или автоматически (например, с использованием такой программы, как программное обеспечение для автосегментации на основе атласов ABAS® производства Elekta, AB, Стокгольм, Швеция). В некоторых вариантах осуществления 3D структура целевой опухоли или OAR может быть сгенерирована автоматически системой 160 планирования лечения.
[0042] После определения местоположения и границ целевой опухоли и OAR дозиметрист, врач или работник здравоохранения могут определить дозу излучения, которая должна быть применена к целевой опухоли и любому OAR поблизости от опухоли (например, левой и правой околоушной железе, зрительным нервам, глазам, хрусталикам, внутреннему уху, спинному мозгу, стволу головного мозга и тому подобному). После определения дозы излучения для каждой анатомической структуры (например, целевой опухоли, OAR), может быть осуществлен процесс, известный как обратное планирование, для определения одного или нескольких параметров плана лечения, таких как границы объемов (например, определяют целевые объемы, определяют контуры чувствительных структур), границы вокруг целевой опухоли и OAR, ограничения дозы (например, полная доза для целевой опухоли и нулевая доза для всех OAR; 95% дозы для PTV, тогда как спинной мозг ≤ 45 Гр, ствол головного мозга ≤ 55 Гр и зрительные структуры < 54 Гр получают, соответственно, упомянутые дозы), выбор угла пучка, настройки коллиматора и моменты включения пучка. Результат обратного планирования может формировать план лечения с помощью радиационной терапии, который может быть сохранен в системе 160 планирования лечения или базе 140 данных. Некоторые из этих параметров лечения могут быть взаимосвязаны. Например, настройка одного параметра (например, весов для различных целей, в том числе повышение дозы для целевой опухоли) в попытке изменить план лечения может повлиять на по меньшей мере один другой параметр, что в свою очередь может приводить к разработке другого плана лечения. Таким образом, система 160 планирования лечения может генерировать адаптированный план лечения с помощью радиационной терапии с этими параметрами, для того чтобы радиотерапевтическое устройство 110 обеспечивало пациенту радиотерапевтическое лечение.
[0043] Кроме того, радиотерапевтическая система 100 включает в себя устройство 180 отображения и пользовательский интерфейс 190. Устройство 180 отображения может включать в себя один или несколько дисплейных экранов, которые отображают медицинские изображения, информацию интерфейса, параметры планирования лечения (например, контуры, дозы, углы пучка и т.д.), планы лечения, мишень, локализацию мишени и/или отслеживание мишени или любую соответствующую информацию для пользователя. Пользовательский интерфейс 190 может представлять собой клавиатуру, кнопочную панель, сенсорный экран или устройство любого типа, с помощью которого пользователь может вводить информацию в радиотерапевтическую систему 100.
[0044] Для того чтобы устройство 110 радиационной терапии локализовало и отслеживало целевую опухоль в анатомической области интереса, процессор 112 может, например, выполнять модуль 128 локализации мишени. Модуль 120 получения мишени может использовать модель 126 адаптивного фильтра, генерируемую обучающим модулем 124, как описано ниже в настоящем раскрытии. Кроме того, модель адаптивного фильтра может включать в себя информацию о конкретной области (например, пространственной области или частотной области), информацию о местоположении (например, 3D местоположение в объеме, информацию о 3D смещении или информацию о 2D сдвиге). Модуль 128 локализации мишени использует по меньшей мере одну модель 126 адаптивного фильтра, генерируемую обучающим модулем 124, как описано ниже.
[0045] Кроме того, любые и все компоненты радиотерапевтической системы 100 в варианте осуществления могут быть реализованы в виде виртуальной машины (например, VMWare, Hyper-V и тому подобных). Например, виртуальный машина может представлять собой программное обеспечение, которое функционирует как аппаратное обеспечение. Поэтому виртуальная машина может включать в себя по меньшей мере один или несколько виртуальных процессоров, одно или несколько виртуальных запоминающих устройств и один или несколько виртуальных интерфейсов связи, которые вместе функционируют как аппаратное обеспечение. Например, в виде виртуальной машины могут быть реализованы OIS 150, TPS 160, устройство 170 получения изображений. Если доступны производительность по обработке данных, память и вычислительная мощность, вся радиотерапевтическая система может быть реализована в виде виртуальной машины.
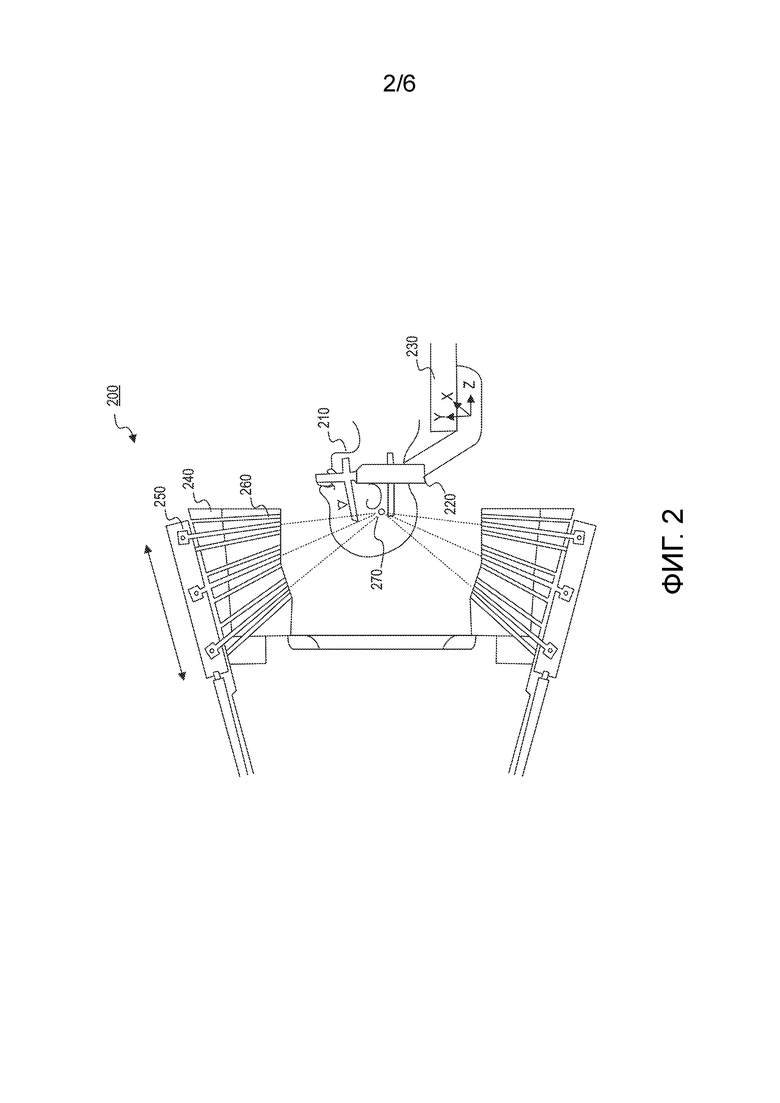
[0046] Фиг. 2 иллюстрирует пример одного типа лечения с помощью устройства 200 радиационной терапии, например гамма-ножа Leksell производства Elekta, AB, Стокгольм, Швеция. Гамма-нож может быть выполнен с возможностью использования модуля 128 локализации мишени (показан на фиг. 1), который может получать удаленный доступ к изображениям МРТ (например, от устройства 170 получения изображений) для локализации целевой опухоли в головном мозге. В варианте осуществления аппарат МРТ в качестве устройства 170 получения изображений может быть интегрирован с гамма-ножом. Как показано на фиг. 2, во время сеанса радиотерапевтического лечения пациент 210 может надевать координатную раму 220 для поддержания неподвижности части тела (например, головы) пациента, подвергающегося хирургии или радиотерапии. Координатная рама 220 и система 230 позиционирования пациента могут определять систему пространственных координат, которой можно пользоваться при визуализации пациента или во время лучевой хирургии. Радиотерапевтическое устройство 200 может включать в себя защитный корпус 240, закрывающий множество источников 250 излучения. Источники 250 излучения могут генерировать множество пучков излучения (например, элементарных пучков) через каналы 260 пучков. Множество пучков излучения может быть выполнено с возможностью фокусирования на изоцентре 270 с различных направлений. При том, что каждый отдельный пучок излучения может иметь относительно низкую интенсивность, изоцентр 270 может получать относительно высокий уровень излучения, когда множество доз из различных пучков излучения собираются в изоцентре 270. В некоторых вариантах осуществления изоцентр 270 может соответствовать мишени, подвергающейся хирургии или лечению, такой как опухоль.
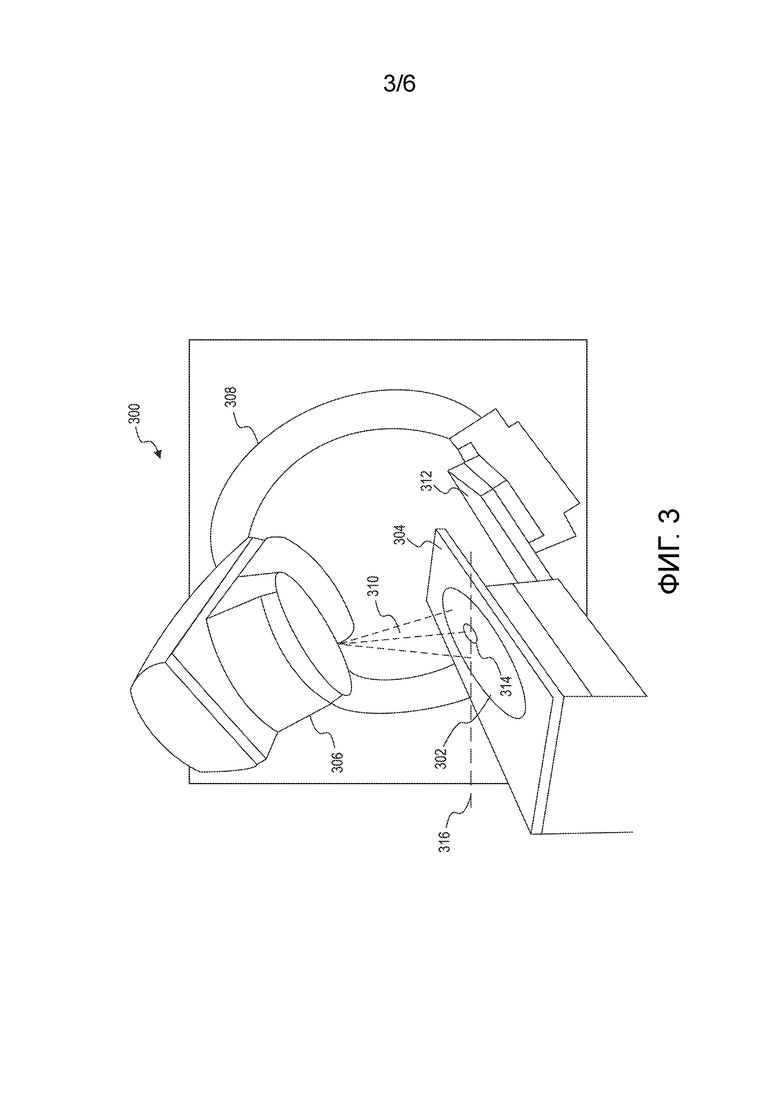
[0047] Фиг. 3 иллюстрирует пример устройства радиационной терапии 300 другого типа (например, линейного ускорителя, называемого LINAC, производства Elekta, AB, Стокгольм, Швеция). При использовании линейного ускорителя 300 пациент 302 может быть расположен на столе 304 пациента для получения дозы излучения, определенной планом лечения с помощью радиационной терапии, сгенерированным системой 160 планирования лечения (показана на фиг. 1). План лучевого лечения может быть использован для локализации и отслеживания 3D мишени в объеме, таком как целевой орган или целевая опухоль, расположенном в пределах анатомии пациента 302.
[0048] Линейный ускоритель 300 может включать в себя излучающую головку 306, соединенную с гентри 308, который вращается вокруг пациента 302. Излучающая головка 306 генерирует пучок 310 излучения, который направлен в сторону целевого органа или целевой опухоли. Когда гентри 308 вращается, излучающая головка 306 может вращаться вокруг пациента 302. При вращении излучающая головка 306 может обеспечивать пациенту 302 множество различных доз излучения в зависимости от угла и формы и размера опухоли в соответствии с планом лечения, сгенерированным системой 160 планирования лечения (показана на фиг. 1). Поскольку органы и опухоли движутся в пределах тела пациента, важна быстрая и точная 3D локализация мишени. Например, целевые орган или опухоль могут двигаться из-за движений различных типов (например, респираторного, сердечного, перистальтического или других типов движений пациента). Поэтому линейный ускоритель 300 может быть выполнен с возможностью локализации мишени (например, органа или опухоли) и отслеживания мишени во время лечения с помощью радиационной терапии с помощью модуля 128 локализации мишени.
[0049] Кроме того, ниже стола 304 пациента может быть предусмотрен плоскопанельный сцинтилляционный детектор 312, который может вращаться синхронно с излучающей головкой 306 вокруг изоцентра 314, расположенного на целевом органе или целевой опухоли на теле пациента 32. Плоскопанельный сцинтиллятор может получать изображения с наивысшим достижимым отношением сигнал-шум, и его можно использовать для проверки количества излучения, полученного пациентом 302 во время любого конкретного сеанса лечения с помощью радиационной терапии (например, лечение с помощью радиационной терапии может требовать нескольких сеансов радиационной терапии, причем каждый сеанс обычно называют "фракцией"). Кроме того, такие изображения используют для определения геометрической точности позиционирования пациента относительно излучающей головки 306.
[0050] Пересечение оси 316 с центром пучка 310, создаваемого излучающей головкой 306, обычно называют "изоцентром". Стол 304 пациента может быть снабжен приводом, так что пациент 302 может быть расположен так, что участок опухоли находится в изоцентре 314 или рядом с ним. Например, стол 304 пациента может изменять положение относительно одного или нескольких других компонентов линейного ускорителя 300, в том числе поднимать, изменять продольное положение или поперечное положение пациента 302 относительно источника терапевтического излучения, расположенного в излучающей головке 306.
[0051] В варианте осуществления линейный ускоритель 300 может быть интегрирован с устройством 170 получения изображений (показано на фиг. 1), таким как устройство магнитно-резонансной томографии, в один аппарат (например, МРТ-Linac). В таком случае МРТ-Linac может включать в себя "виртуальный стол", который может "виртуально" регулировать выравнивание пациента 302 относительно источника излучения, когда стол 304 пациента лишен возможности перемещаться из-за ограниченных размеров туннеля, через который проходит стол 304 пациента во время лечения с помощью радиационной терапии. В таком варианте осуществления МРТ-Linac можно использовать для определения местоположения мишени и отслеживания мишени в пациенте 302 с использованием модуля 128 локализации мишени, в том числе для направления радиационной терапии на заранее определенную мишень.
[0052] Фиг. 4 иллюстрирует процесс 400 генерации обучающим модулем 124 модели 126 адаптивного фильтра. Модель 126 адаптивного фильтра (показана на фиг. 1) может быть использована модулем 128 локализации мишени для определения местоположения мишени, а затем для отслеживания мишени.
[0053] На этапе 402 обучающий модуль 124 (показан на фиг. 1) принимает от устройства 170 получения изображений множество изображений (например, 3D МРТ, 4D МРТ и т.д.) области интереса для конкретного пациента. Множество изображений, например, может представлять собой изображения 3D МРТ или изображения 4D МРТ области интереса, которые содержат мишень (например, целевой орган, целевую опухоль и т.д.).
[0054] На этапе 404 обучающий модуль 110 с использованием процессора 112 переходит к извлечению множества срезов (например, 2D срезов), которые включают в себя мишень (например, целевой орган, целевую опухоль и т.д.) в области интереса, из множества изображений МРТ. Толщина, например, 2D срезов может быть заранее определена (например, определена из информации, основанной на 3D объемной МРТ или 4D объемной МРТ) до начала лечения с помощью радиационной терапии. Информация может включать в себя, должны ли 2D срезы находиться в частотной области или в пространственной области. В качестве альтернативы, обучающий модуль 110 может принимать информацию 2D срезов, когда пациент 402 подвергается лечению с помощью радиационной терапии (например, в реальном времени). Например, для лечения пациента 402 с помощью радиационной терапии можно использовать МРТ-Linac. В процессе радиотерапии МРТ-Linac может принимать множество изображений 3D МРТ или изображений 4D МРТ в процессе лечения. Извлеченные срезы представляют собой 2D срезы анатомии пациента, которая окружает мишень. Кроме того, извлеченные 2D срезы могут быть или параллельны, или ортогональны движению мишени.
[0055] На этапе 406 процессор 112 определяет один или несколько 2D патчей для каждого извлеченного 2D среза. В примере 2D патч может соответствовать участку изображения 2D среза, который может включать в себя мишень. 2D патч может иметь любую форму (например, форму квадрата, прямоугольника, круга, многоугольника и т.д.) и может иметь разный размер (например, патч 32×32 пикселей, патч 64×64 пикселей и т.д.). Для иллюстрации, квадратный патч, например, может составлять 32×32 пикселей, соответствуя мишени на 2D срезе, которая составляет 512×512 пикселей. В примере 2D патч может включать в себя информацию о мишени и информацию, соответствующую участку, который не включает в себя мишень (например, информацию о фоне).
[0056] На этапе 408 процессор 112 определяет значение смещения. Значение смещения представляет собой, например, расстояние от центра 2D патча до центра мишени, которая должна быть отслежена. 2D патчи могут включать в себя информацию о области (например, информацию о пространственной области или частотной области 2D патчей). Кроме того, информация о смещении может включать в себя такую информацию, как сдвиг 2D патча от опорной точки (например, от опорной точки, соответствующей мишени в объеме), и информацию о изменении формы мишени (например, деформации). В примере опорная точка может включать в себя вычисленный центр мишени (например, центроид опухоли). Значение смещения определяют для каждого 2D патча, содержащего мишень. Поэтому каждый 2D патч имеет свое собственное связанное с ним значение смещения. Множество значений смещения и связанные с ними патчи хранятся в памяти 116.
[0057] Например, если предположить, что центр 2D патча имеет координаты (например, [xp, yp, zp]), и центр целевой опухоли имеет координаты (например, [xt, yt, zt]), то смещение центра 2D патча, связанного с 3D местоположением целевой опухоли, может представлять собой вектор (например, [ox, oy, oz]=[xt-xp, yt-yp, zt-zp]). Следовательно, процессор 112 может отслеживать целевую опухоль. Во время отслеживания процессор 112 может локализовать центр 2D патча для нового положения пациента (например, "онлайн/в реальном времени", например [xpnew, ypnew, zpnew]). Процессор 112 затем может определить местоположение опухоли (например, [xtnew, ytnew, ztnew]=[xpnew+ox, ypnew+oy, zpnew+oz]).
[0058] На этапе 410 процессор 112 может использовать методы конструирования адаптивных фильтров одного или нескольких типов для преобразования каждого из патчей в модель 126 адаптивного фильтра. Например, можно использовать следующие типы конструкций адаптивных фильтров: согласованные фильтры, фильтры максимальной корреляции границ, фильтры синтетических дискриминирующих функций, фильтры минимальной среднеквадратичной ошибки и тому подобные. Кроме того, модель 126 адаптивного фильтра может включать в себя информацию о области и информацию о смещении, определенные из 2D патчей, соответствующих мишени в объеме.
[0059] Обычно модели 126 адаптивных фильтров, например, "моделируют" объект (например, опухоль), подлежащий локализации. Может быть сгенерировано множество моделей 126 адаптивных фильтров. Например, могут существовать модель 126 адаптивного фильтра для верхней части опухоли, модель 126 адаптивного фильтра для средней части опухоли и модель 126 адаптивного фильтра для нижней части опухоли. Кроме того, модели 126 адаптивных фильтров могут быть сгенерированы для различных частей человеческой анатомии (например, одного или нескольких целевых органов интереса, таких как предстательная железа, молочная железа, легкое, сердце, головной мозг и т.д.). Кроме того, модель 126 адаптивного фильтра может быть сгенерирована для каждой мишени интереса (например, одной или нескольких опухолей в определенном органе - например нескольких опухолей в легком; или в случае, когда рак метастазировал, и существуют одна или несколько опухолей в одном или нескольких органах, и т.д.).
[0060] Кроме того, модель 126 адаптивного фильтра может быть сконструирована или в пространственной области, или в частотной области. В примере применение модели 126 адаптивного фильтра к 2D срезам может быть более вычислительно эффективным в частотной области. Модель 126 адаптивного фильтра может быть сохранена в памяти 116 (показана на фиг. 1) и извлечена процессором 112 для применения к полученным позже 2D срезам (например, 2D срезам, получаемым "в реальном времени"/"онлайн") для предсказания местоположения мишени во время лечения пациента с помощью радиационной терапии.
[0061] Фиг. 5 иллюстрирует типичную блок-схему последовательности процесса 500 для применения одной или нескольких моделей 126 адаптивных фильтров для отслеживания мишени во время лечения пациента с помощью радиационной терапии "в реальном времени"/"онлайн".
[0062] На этапе 502 процесс 500 инициируется радиотерапевтическим устройством 10 (показано на фиг. 1) посредством процессора 116, обращающегося к модулю 128 локализации мишени, который извлекает множество моделей 126 адаптивных фильтров, сконструированных для области интереса (например, предстательной железы, молочной железы, легких и т.д.), включая целевую опухоль для конкретного пациента.
[0063] На этапе 504 процессор 116 принимает протокол получения данных для передачи на устройство 170 получения изображений для генерации начального набора 2D срезов. Протокол может включать в себя, например, местоположение срезов, подлежащих получению (например, легкое, предстательная железа, головной мозг, почки и т.д.), ориентацию среза (например, на основании заранее определенного возможного движения органа - такого как параллельно или ортогонально получаемому срезу) и толщину среза (например, срез 5 мм, срез 10 мм, срез 15 мм и т.д.). Пользователь может предоставлять начальную оценку местоположения мишени, которая может быть передана посредством пользовательского интерфейса 190. Процессор 116 может использовать эту исходную оценку в качестве исходного местоположения, с которого он начинает получение 2D срезов. В качестве альтернативы, такая информация о местоположении может быть определена автоматически процессором 116.
[0064] На этапе 506 радиотерапевтическое устройство дополнительно принимает в соответствии с протоколом множество 2D срезов МРТ от устройства 170 получения изображений (например, устройства МРТ или устройства МРТ-Linac). 2D изображения могут соответствовать области интереса, содержащей опухоль. 2D срезы могут быть параллельны или ортогональны опухоли. 2D срезы могут окружать опухоль. Кроме того, 2D срезы могут представлять собой область вокруг опухоли. Обычно устройство МРТ предоставляет 2D срезы в частотной области.
[0065] На этапах 508-514, описанных ниже, процессор 116 определяет местоположение опухоли на 2D срезе и ее местоположение в 3D объеме.
[0066] На этапе 508 процессор 116 может преобразовывать 2D срезы или в частотную область, или в пространственную область. 2D срезы преобразуют для соответствия области модели 126 адаптивного фильтра. Например, если модель 126 адаптивного фильтра была создана в пространственной области, 2D срезы, например, процессор 116 может преобразовывать 2D срезы в пространственную область. В качестве альтернативы, если модель 126 адаптивного фильтра была создана в частотной области, процессор 116 может преобразовывать 2D срезы в частотную область.
[0067] На этапе 510 процессор 116 может применять модель 126 адаптивного фильтра. Как рассмотрено выше, модель 126 адаптивного фильтра представляет собой множество моделей, сгенерированных из множества 2D патчей, которые были обучены обучающим модулем 126. Процессор 112 применяет множество моделей 126 адаптивных фильтров к 2D срезам. 2D срез и модель адаптивного фильтра, например, могут иметь одинаковую ориентацию (например, ортогональную по отношению к направлению движения, параллельную по отношению к направлению движения или и ту, и другую). В примере применение модели 126 адаптивного фильтра к 2D срезам может быть более вычислительно эффективным в частотной области. Пример того, как модель 126 адаптивного фильтра может быть применена к 2D срезам, следует ниже:
[0068] Модель 126 адаптивного фильтра может быть обозначена 2D шаблоном  в пространственной области, а 2D срез (например, 2D изображение) может быть обозначен
в пространственной области, а 2D срез (например, 2D изображение) может быть обозначен  . Применение модели 126 адаптивного фильтра к конкретному местоположению 2D среза может обеспечивать связанный с корреляцией "уровень достоверности". Уровень достоверности, например, обеспечивает показатель того, насколько хорошо конкретная модель адаптивного фильтра соответствует конкретному местоположению 2D среза.
. Применение модели 126 адаптивного фильтра к конкретному местоположению 2D среза может обеспечивать связанный с корреляцией "уровень достоверности". Уровень достоверности, например, обеспечивает показатель того, насколько хорошо конкретная модель адаптивного фильтра соответствует конкретному местоположению 2D среза.
[0069] В примере чем лучше соответствует модель 126 адаптивного фильтра конкретному местоположению 2D среза, тем выше уровень достоверности. Уровень достоверности можно использовать для предсказания того, существует ли целевая опухоль в пределах 2D среза, и где она расположена. Можно использовать ряд различных типов корреляции для определения уровня достоверности в зависимости от условий. Например, можно использовать следующие типы корреляции: кросс-корреляцию, нормализованную кросс-корреляцию или коэффициент корреляции, которые могут быть определены:
[0070] Кросс-корреляция:  ;
;
[0071] Нормированная кросс-корреляция:  ; или
; или
[0072] Коэффициент корреляции:
[0073]  (например, коэффициент корреляции эквивалентен нормализованной кросс-корреляции скорректированных по среднему шаблона и изображения).
(например, коэффициент корреляции эквивалентен нормализованной кросс-корреляции скорректированных по среднему шаблона и изображения).
[0074] В приведенных выше уравнениях: P обозначает пространственную область шаблона;  и
и  обозначают среднее значение шаблона T и среза I, соответственно. Кроме того, как
обозначают среднее значение шаблона T и среза I, соответственно. Кроме того, как  , так и
, так и  ограничены, например, условием
ограничены, например, условием  , так что их значения можно интерпретировать как уровень достоверности относительно результата, при идеальном соответствии составляющий +1. Уровень достоверности может включать в себя такую информацию как, например, R, N или C, как определено выше.
, так что их значения можно интерпретировать как уровень достоверности относительно результата, при идеальном соответствии составляющий +1. Уровень достоверности может включать в себя такую информацию как, например, R, N или C, как определено выше.
[0075] Эти три корреляционных вычисления могут быть выполнены также в частотной области с помощью применения теоремы о свертке, например:  , где
, где  и
и  обозначают прямое и обратное преобразование Фурье, соответственно.
обозначают прямое и обратное преобразование Фурье, соответственно.
[0076] На этапе 512 процессор 112 может в результате применения модели 126 адаптивного фильтра к 2D срезу определять карту отклика. Для одного 2D среза может быть создано множество карт отклика, чтобы каждая карта отклика могла соответствовать определенной модели адаптивного фильтра. Как модель адаптивного фильтра, так и 2D срез могут иметь одинаковую ориентацию. Карта отклика может быть сгенерирована в пространственной области или в частотной области. Как 2D срез, так и модель 126 адаптивного фильтра должны быть в пространственной области для генерации карты отклика в пространственной области. Аналогично, как 2D срез, так и модель 126 адаптивного фильтра должны быть в частотной области для генерации карты отклика в частотной области. Карта отклика может быть создана для каждого 2D среза. Сгенерированная карта отклика может представлять собой изображение, которое указывает, насколько конкретная модель 126 адаптивного фильтра соответствует различным местоположениям в пределах заданного 2D среза.
[0077] Например, модель A адаптивного фильтра (не показана) может быть применена посредством процессора 112 к каждому местоположению на 2D срезе. Для каждого местоположения процессор 112 может определять уровень достоверности, который указывает на то, насколько хорошо, например, адаптивный фильтр A соответствует конкретному местоположению 2D среза. Чем лучше соответствие модели A адаптивного фильтра для местоположения на 2D срезе, тем выше уровень достоверности (например, ближе к +1) для этого конкретного местоположения. Более яркие участки на изображении карты отклика могут указывать на лучшее соответствие, и поэтому на более высокий уровень достоверности (например, модели A адаптивного фильтра в конкретном местоположении 2D среза), чем более темные участки. Более яркие участки на карте отклика могут иметь более высокие уровни достоверности, чем более темные участки. После того как модель A адаптивного фильтра применяют к 2D срезу, может быть сгенерирована карта A отклика. Процессор 112 может извлечь другую модель B адаптивного фильтра (не показана), например, и повторить процесс применения модели B адаптивного фильтра к каждому местоположению на 2D срезе для генерации карты B отклика. Таким образом, процессор, использующий модуль локализации мишени, может применять множество моделей адаптивных фильтров к 2D срезу для генерации множества карт отклика, которые могут быть сохранены в памяти 116. В каждом местоположении 2D среза генерируется уровень достоверности, соответствующий используемой модели адаптивного фильтра. Высокий уровень достоверности может соответствовать местоположению на 2D срезе, в котором может быть расположена целевая опухоль.
[0078] На этапе 514 процессор 112 может предсказывать местоположение целевой опухоли на 2D срезе на основании уровня достоверности. Например, для конкретного местоположения на карте отклика может быть несколько значений уровня достоверности, причем каждый уровень достоверности может соответствовать конкретной модели адаптивного фильтра. Для того чтобы предсказать местоположение опухоли, процессор 112 может выбирать максимальное значение уровня достоверности для конкретного местоположения на 2D срезе. В качестве альтернативы, процессор 112 может использовать взвешенное среднее всех уровней достоверности для конкретного местоположения на 2D срезе. В примере процессор 112 может вычислять взвешенное среднее N наибольших уровней достоверности, где N представляет собой заранее определенное число. Использование уровней достоверности, сгенерированных с использованием множества моделей адаптивных фильтров, может повышать точность предсказания. Поэтому высокий уровень достоверности для конкретного местоположения может указывать на местоположение мишени на 2D срезе, а низкий уровень достоверности может указывать на то, что опухоли в этом местоположении нет. Уровень достоверности, наиболее близкий к +1, может указывать на то, что часть опухоли или вся опухоль расположены на этом 2D срезе.
[0079] Если процессор 112 определяет, что 2D срез не содержит опухоль, процесс 500 продолжается по 501, возвращаясь к 506, для получения другого 2D среза. Процесс 500 может вынуждать процессор 112 регулировать протокол получения, для того чтобы получить следующий 2D срез. В качестве альтернативы, опухоль может быть включена в один или несколько 2D срезов в зависимости от толщины среза, размера опухоли, ориентации опухоли и других факторов. Например, если нижняя часть опухоли включена в настоящий 2D срез, процессор 112 может использовать информацию о смещении для определения того, какой 2D срез следует получать дальше (например, 2D срез, содержащий центроид опухоли, или, может быть, 2D срез, включающий в себя верх опухоли).
[0080] Например, используя информацию от конкретной модели адаптивного фильтра и соответствующую ей карту отклика, процессор 112 может определить местоположение опухоли на предыдущем 2D срезе. Кроме того, используя информацию о смещении, связанную с моделью адаптивного фильтра, процессор 112 может также определить местоположение (например, центр) опухоли в 3D. Например, процессор 112 может определить, что опухоль пересекает 2D срез, например, в местоположении пикселя (5,10), и что центр опухоли может отстоять на 5 мм от центра 2D среза в нормальном по отношению к срезу направлении. Для того чтобы определить следующее положение опухоли (например, отследить опухоль, когда она движется) или получить более полную информацию о форме опухоли (например, изменилась ли форма опухоли), процессор 112 может регулировать различные параметры (например, местоположение, в котором будет получен следующий 2D срез, получение следующего 2D среза, который параллелен предыдущему срезу, но в другом положении, получение 2D среза, который ортогонален предыдущему срезу, регулировать толщину последующего среза и т.д.). Кроме того, используя информацию о смещении из предыдущей модели адаптивного фильтра, процессор 112 может также определять следующее положение опухоли. Таким образом, процессор 112 может отслеживать движение опухоли в реальном времени, в то время как пациент подвергается радиационной терапии.
[0081] На этапе 516 процессор 112 может отслеживать опухоль, в то время как пациент подвергается лечению с помощью радиационной терапии "в реальном времени". Кроме того, при использовании множества 2D срезов процессор 112 может определять форму опухоли.
[0082] Фиг. 6 графически иллюстрирует типичную модель адаптивного фильтра, применяемую к 2D срезу МРТ для определения местоположения мишени (например, печени). На этапе 602 графически представлен пример модели адаптивного фильтра в пространственной области. Процессор 112 (показан на фиг. 1) может использовать модуль 129 локализации мишени для применения модели адаптивного фильтра, показанной в 602, к конкретному 2D срезу, который также находится в пространственной области. Посредством применения типичной модели 602 адаптивного фильтра к 2D срезу процессор 112 может определять для каждого местоположения 2D среза, насколько хорошо типичная модель 602 адаптивного фильтра соответствует конкретному местоположению 2D среза. Предпочтительно, процессор 112 может вычислять каждый 2D срез приблизительно за 300 мс. Модуль 129 локализации мишени генерирует типичную карту отклика, которая графически проиллюстрирована в 604. Типичная карта 604 отклика может изображать, насколько хорошо модель 602 адаптивного фильтра соответствует каждому местоположению 2D среза. Более яркие участки, показанные на типичной карте 604 отклика, указывают на лучшее соответствие, и поэтому на более высокий уровень достоверности модели 602 адаптивного фильтра в конкретном местоположении 2D среза, чем более темные участки. Более яркие участки на карте 604 отклика могут иметь более высокие уровни достоверности, чем более темные участки. Как проиллюстрировано, карта 604 отклика указывает на яркий участок 608, который может соответствовать наивысшему уровню достоверности для этого 2D среза, как определено процессором 112. Яркий участок 608 на карте 604 отклика, следовательно, может соответствовать местоположению мишени на этом конкретном 2D срезе. Поэтому процессор 112 определил местоположение мишени 608, которая расположена на этом конкретном 2D срезе. Кроме того, благодаря местоположению анатомии пациента, в котором был сгенерирован 2D срез устройством 170 получения изображений, процессор 112 может определить местоположение мишени 608 на анатомии пациента, как показано в 606. Красный участок в 606 соответствует, например, модели 602 адаптивного фильтра, наложенной на анатомию пациента. В другом варианте осуществления, например, мишень может представлять собой опухоль.
[0083] В качестве альтернативы, карта отклика, например, может быть представлена в частотной области в зависимости от того, находятся ли 2D срезы и модель адаптивного фильтра в частотной области. Для генерации карты отклика в частотной области процессор 112 может выполнять быстрое преобразование Фурье (FFT) на 2D срезе. Процессор 112 применяет модель адаптивного фильтра, выполняя поточечное умножение в частотной области. для генерации карты отклика процессор 112 может выполнять обратное быстрое преобразование Фурье.
Дополнительные замечания
[0084] Все публикации, патенты и патентные документы, упомянутые в настоящем документе, включены в настоящий документ посредством ссылки во всей полноте, как если бы они были по-отдельности включены посредством ссылки. В случае несовместимых применений между данным документом и документами, включенными таким образом посредством ссылки, применение во включенной ссылке(ах) следует считать дополнительным по отношению к применению в данном документе; в случае несовместимых несоответствий применение в данном документе имеет преимущество.
[0085] Типичные раскрытые варианты осуществления описывают системы и способы для отслеживания мишени (например, опухоли) в анатомии пациента, в то время как пациент подвергается лечению с помощью радиационной терапии. Приведенное выше описание было представлено в целях иллюстрации. Оно не является исчерпывающим и не ограничивается точными раскрытыми формами или вариантами осуществления. Модификации и адаптации вариантов осуществления будут очевидны из рассмотрения описания изобретения и осуществления раскрытых вариантов осуществления на практике.
[0086] В данном документе единственное число используется, как это принято в патентных документах, для обозначения одного или больше чем одного элемента, независимо от любых других вхождений или использований выражений "по меньшей мере один" или "один или несколько". В данном документе термин "или" используется для обозначения неисключительного или, так что "A или B" включает в себя "A, но не B", "B, но не A" и "A и B", если не указано иное. В данном документе термины "включающий в себя" и "в котором" используются как простые эквиваленты соответствующих терминов "содержащий" и "причем". Кроме того, в нижеследующей формуле изобретения термины "включающий в себя" и "содержащий" являются неограничивающими, то есть приспособление, система, устройство, изделие, композиция, состав или процесс, который включает в себя элементы помимо перечисленных после такого термина в пункте формулы изобретения, по-прежнему считаются находящимися в пределах объема этого пункта формулы изобретения. Кроме того, в нижеследующей формуле изобретения, термины "первый", "второй" и "третий" и т.д. используются только в качестве меток, и не предназначены для наложения количественных требований на их дополнения.
[0087] Примеры способов, описанные в настоящем документе, могут быть, по меньшей мере, частично машинно или компьютерно реализуемыми. Некоторые примеры могут включать в себя машиночитаемый носитель или машиночитаемый носитель, на котором закодированы команды, подходящие для конфигурирования электронного устройства для выполнения способов, описанных в приведенных выше примерах. Осуществление таких способов может включать в себя программный код, такой как микрокод, код на языке ассемблера, код на языке более высокого уровня или тому подобное. Различные программы или программные модули могут быть созданы с использованием множества методов разработки программного обеспечения. Например, программные секции или программные модули могут быть разработаны на или с помощью Java, Python, C, C++, языка ассемблера или любых известных языков программирования. Один или несколько из таких секций или модулей программного обеспечения могут быть интегрированы в компьютерную систему и/или машиночитаемые носители. Такой код программного обеспечения может включать в себя машиночитаемые команды для осуществления различных способов. Код программного обеспечения может образовывать части компьютерных программных продуктов или компьютерных программных модулей. Кроме того, в примере код программного обеспечения может быть материально сохранен на одном или нескольких энергозависимых, не временных или энергонезависимых материальных машиночитаемых носителях, например, во время выполнения или в другое время. Примеры таких материальных машиночитаемых носителей могут включать в себя, но без ограничения, жесткие диски, сменные магнитные диски, сменные оптические диски (например, компакт-диски и цифровые видеодиски), магнитные кассеты, карты памяти или флеш-накопители, модули памяти с произвольным доступом (RAM), модули доступной только для чтения памяти (ROM) и тому подобное.
[0088] Кроме того, хотя в настоящем документе были описаны иллюстративные варианты осуществления, его объем включает в себя любые и все варианты осуществления, имеющие эквивалентные элементы, модификации, пропуски, комбинации (например, аспектов из различных вариантов осуществления), адаптации или изменения на основании настоящего раскрытия. Элементы в формуле изобретения следует толковать в широком смысле, исходя из языка, используемого в формуле изобретения, и без ограничения примерами, описанными в настоящем описании изобретения или во время рассмотрения заявки, причем эти примеры следует рассматривать как неисключительные. Кроме того, этапы раскрытых способов могут быть изменены любым способом, в том числе путем изменения порядка этапов или вставки или удаления этапов. Поэтому предполагается, что настоящие описание изобретения и примеры следует рассматривать только в качестве примера, тогда как истинные объем и сущность указаны нижеследующей формулой изобретения и полным объемом ее эквивалентов.
[0089] Предполагается, что приведенное выше описание является иллюстративным, а не ограничивающим. Например, вышеописанные примеры (или один или несколько их аспектов) могут быть использованы в комбинации друг с другом. Другие варианты осуществления могут быть использованы, например, средним специалистом в области техники после рассмотрения приведенного выше описания. Для соответствия 37 C.F.R. 1.72(b) предлагается реферат, позволяющий читателю быстро понять характер технического раскрытия. Он предоставлен с пониманием того, что он не должен использоваться для интерпретации или ограничения объема или смысла формулы изобретения. Кроме того, в приведенном выше подробном описании различные признаки могут быть сгруппированы вместе, чтобы упростить раскрытие. Это не должно быть истолковано в том смысле, что не включенный в формулу изобретения раскрытый признак существенен для любого пункта формулы изобретения. Скорее предмет изобретения может заключаться менее чем во всех признаках конкретного раскрытого варианта осуществления. Таким образом, нижеследующая формула изобретения настоящим включена в подробное описание в качестве примеров или вариантов осуществления, причем каждый пункт формулы изобретения стоит сам по себе как отдельный вариант осуществления, и предполагается, что такие варианты осуществления могут быть объединены друг с другом в различных комбинациях или сочетаниях. Объем настоящего изобретения должен быть определен со ссылкой на прилагаемую формулу изобретения наряду с полным объемом эквивалентов, которые основаны на такой формуле изобретения.
Настоящее раскрытие относится к системам, способам и машиночитаемому носителю хранения для сегментирования медицинского изображения. Технический результат заключается в точной локализации и отслеживании опухоли в анатомии пациента. Варианты осуществления настоящего раскрытия могут локализовывать мишень в трехмерном (3D) объеме. Например, устройство получения изображений может предоставлять медицинское 3D изображение, содержащее область интереса мишени. Затем процессор может извлекать множество двухмерных (2D) срезов из 3D изображения. Процессор может также определять 2D патч для каждого 2D среза, причем 2D патч соответствует участку 2D среза, связанному с мишенью. Процессор может также преобразовывать 2D патч в модель адаптивного фильтра для определения местоположения области интереса. 2 н. и 24 з.п. ф-лы, 6 ил.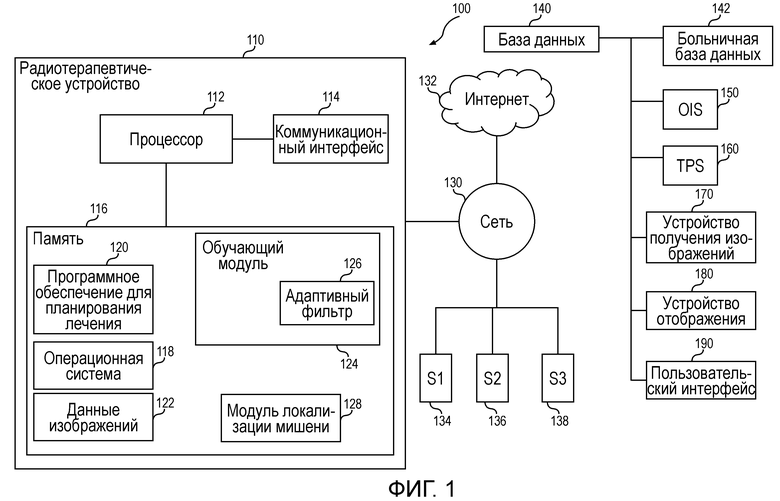
1. Реализуемый процессором способ локализации мишени в трехмерном (3D) объеме, причем способ содержит:
прием от устройства получения изображений медицинского 3D изображения, содержащего область интереса мишени;
извлечение, посредством процессора, множества двухмерных (2D) срезов из 3D изображения;
определение, посредством процессора, 2D патча для каждого 2D среза, причем 2D патч соответствует участку 2D среза, связанному с мишенью;
определение, посредством процессора, значения смещения, отражающего расстояние между местоположением патча и местоположением мишени; и
преобразование, посредством процессора, 2D патча в модель адаптивного фильтра для определения местоположения мишени в области интереса, причем модель адаптивного фильтра включает в себя упомянутое значение смещения.
2. Способ по п. 1, в котором преобразование 2D патча включает в себя использование модели адаптивного фильтра, и в котором модель адаптивного фильтра содержит по меньшей мере один из согласованных фильтров, фильтров максимальной корреляции границ, фильтров синтетических дискриминирующих функций и фильтров минимальной среднеквадратичной ошибки.
3. Способ по п. 1, в котором значение смещения содержит вектор расстояния между точкой на 2D патче и опорной точкой в пределах мишени в пределах 3D объема.
4. Способ по п. 1, в котором 2D срез по существу параллелен движению мишени в 3D объеме.
5. Способ по п. 1, в котором 2D срез по существу ортогонален движению мишени в 3D объеме.
6. Способ по п. 1, в котором как модель адаптивного фильтра, так и 2D срез имеют идентичную ориентацию.
7. Способ по п. 1, в котором 2D срез находится или в частотной области, или в пространственной области.
8. Способ по п. 1, в котором модель адаптивного фильтра находится или в частотной области, или в пространственной области.
9. Способ по п. 1, в котором и модель адаптивного фильтра, и 2D срез находятся в одной и той же области, причем область представляет собой или частотную область, или пространственную область.
10. Способ по п. 1, дополнительно содержащий преобразование посредством процессора 2D среза в область модели адаптивного фильтра, причем область представляет собой по меньшей мере одну из частотной области или пространственной области и причем модель адаптивного фильтра находится в ориентации, аналогичной 2D срезу.
11. Способ по п. 1, дополнительно содержащий регулировку параметра посредством процессора перед извлечением множества двухмерных (2D) срезов из медицинского изображения.
12. Способ по п. 11, в котором параметр содержит параметр местоположения мишени.
13. Способ по п. 11, в котором параметр содержит параметр исходного местоположения мишени.
14. Способ по п. 11, в котором параметр содержит параметр ориентации среза.
15. Способ по п. 14, в котором параметр ориентации среза содержит по меньшей мере одну из сагиттальной ориентации, корональной ориентации или осевой ориентации.
16. Способ по п. 11, в котором параметр содержит параметр толщины среза.
17. Способ по п. 11, в котором параметр содержит направление движения мишени в параметре 3D объема.
18. Способ по п. 1, в котором модель адаптивного фильтра включает в себя уровень достоверности, причем уровень достоверности указывает относительную степень соответствия между моделью адаптивного фильтра и конкретным местоположением 2D среза.
19. Способ по п. 1, в котором процессор генерирует множество моделей адаптивных фильтров.
20. Способ по п. 19, в котором каждая из множества моделей адаптивных фильтров разработана для конкретной области интереса, которая включает в себя мишень.
21. Способ по п. 20, в котором процессор объединяет две или более моделей адаптивных фильтров и каждая модель фильтра соответствует разным ориентациям среза.
22. Способ по п. 1, в котором 2D патч соответствует участку 2D среза, который включает в себя мишень.
23. Способ по п. 1, в котором 2D патч выполнен с возможностью включения в себя информации, соответствующей участку, окружающему мишень, но не включает в себя мишень.
24. Способ по п. 1, в котором 2D патч находится или в пространственной области или в частотной области.
25. Способ по п. 1, в котором каждый 2D патч включает в себя соответствующее значение смещения, отражающее расстояние между местоположением патча и местоположением опухоли.
26. Система для отслеживания трехмерной (3D) мишени в объеме с использованием срезов двухмерной визуализации объема, причем система содержит:
процессор и
память, функционально связанную с процессором и хранящую выполняемые компьютером команды, которые при исполнении посредством процессора вынуждают процессор выполнять способ, содержащий:
прием, от устройства получения изображений, медицинского 3D изображения 3D объема, содержащего область интереса мишени, причем 3D изображение хранится в памяти;
извлечение, посредством процессора, множества двухмерных (2D) срезов из 3D изображения;
определение, посредством процессора, 2D патча для каждого 2D среза, причем 2D патч соответствует участку 2D среза, связанному с мишенью;
определение, посредством процессора, значения смещения, отражающего расстояние между местоположением патча и местоположением мишени; и
преобразование, посредством процессора, 2D патча в модель адаптивного фильтра для определения местоположения мишени в области интереса, причем модель адаптивного фильтра включает в себя упомянутое значение смещения.
| US 2014093160 A1, 03.04.2014 | |||
| US 2006098855 A1, 11.05.2006 | |||
| US 2008130825 A1, 05.06.2008 | |||
| СПОСОБ ВЫЯВЛЕНИЯ В КОРЕ ГОЛОВНОГО МОЗГА СЕНСОМОТОРНЫХ ЗОН, ОТВЕТСТВЕННЫХ ЗА ЛОКОМОЦИЮ | 2012 |
|
RU2504329C1 |

