ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в основном относится к пассажирским транспортерам и, в частности, к системам для обнаружения местоположения человека относительно пассажирского транспортера.
Пассажирские транспортеры, такие как эскалаторы и движущиеся дорожки, используются для эффективного перемещения пассажиров из первого местоположения во второе местоположение. Обычный эскалатор содержит движущиеся ступени, соединенные вместе и прикрепленные к цепи, которая перемещается относительно пары зубчатых колес на каждом конце эскалатора, одна из которых приводится механизмом. Перила расположены по бокам движущихся ступеней, и каждые перила содержат движущийся поручень, который перемещается одновременно со ступенями. Обычная движущаяся дорожка содержит много таких же компонентов, как и эскалатор, за исключением того, что дорожка по существу плоская, а не наклонная, и использует площадки вместо ступеней.
Для прекращения работы или изменения режима работы пассажирского транспортера использовались системы распознавания с целью обеспечения безопасности, технического обслуживания или экономии энергии. Обычно такие системы распознавания пассажиров использовали множественные датчики на входе и выходе или по длине пассажирского транспортера для обнаружения наличия человека, приближающегося к входу или выходу или перемещающегося на пассажирском транспортере. В качестве таких датчиков выступали оптические датчики, инфракрасные датчики, пьезоэлектрические датчики или радиопередатчики. Так как по мере увеличения длины пассажирского транспортера требуется увеличение количества датчиков, эти системы могут быть чрезмерно дорогими в установке и эксплуатации.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение представляет собой систему для обнаружения человека относительно пассажирского транспортера. Система содержит управляющую схему для подачи колебательного управляющего сигнала, емкостный датчик, содержащий первый электрод, выполненный с возможностью выработки электрического поля в направлении второго электрода в ответ на указанный колебательный управляющий сигнал, схему обнаружения, соединенную с указанным емкостным датчиком для восприятия изменений емкости этого емкостного датчика, и контроллер. Когда человек прерывает электрическое поле между первым и вторым электродами, схема обнаружения воспринимает изменения емкости емкостного датчика и вырабатывает выходной сигнал в зависимости от емкости. Основываясь на изменениях, воспринятых схемой обнаружения, контроллер избирательно регулирует режим работы пассажирского транспортера, например, путем управления пассажирского транспортера для пуска, замедления, ускорения, остановки или предотвращения пуска.
Настоящее изобретение имеет по меньшей мере два применения:
обнаружение человека между перилами пассажирского транспортера и обнаружение человека внутри машинного отделения пассажирского транспортера. Для обнаружения человека между перилами пассажирского транспортера электрический сигнал подается на первый электрод на первых перилах для генерации электрического поля в пространстве между первым электродом и вторым электродом на вторых перилах, противоположных первым перилам. Когда пассажир присутствует на пассажирском транспортере, обнаруживается изменение емкости между первым и вторым электродами. Работа пассажирского транспортера управляется в зависимости от указанного обнаруженного изменения емкости. Для обнаружения человека в машинном отделении пассажирского транспортера электрический сигнал передается на сигнальный провод, расположенный в машинном отделении, для создания электрического поля между этим проводом и электрически изолированным компонентом внутри этого машинного отделения. Присутствие человека в машинном отделении прервет электрическое поле и изменит емкость между указанными сигнальным проводом и компонентом. Это изменение емкости обнаруживается при помощи схемы обнаружения, и работа пассажирского транспортера управляется в зависимости от указанного обнаруженного изменения емкости.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ.
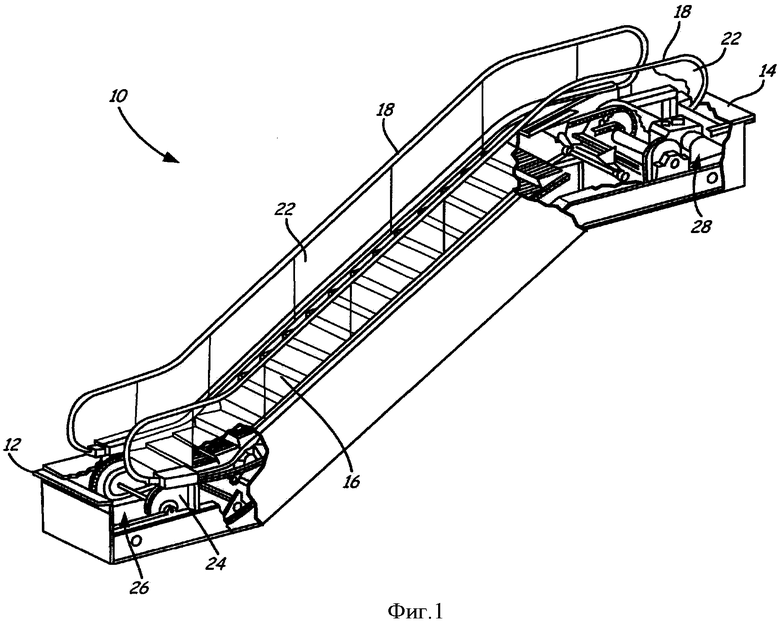
На Фиг.1 показан вид в перспективе пассажирского транспортера, содержащий части машинного отделения для приводной системы пассажирского транспортера.
На Фиг.2 показана блок-схема системы обнаружения для использования в пассажирском транспортере согласно варианту реализации настоящего изобретения.
На Фиг.3A-3F показаны схемы, иллюстрирующие типовые режимы работы системы обнаружения настоящего изобретения.
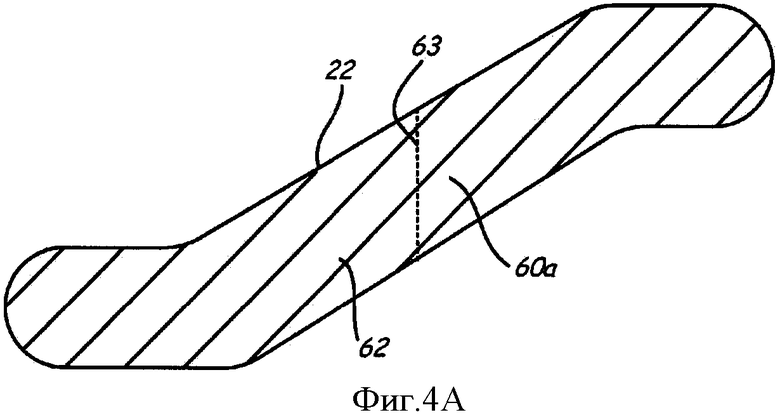
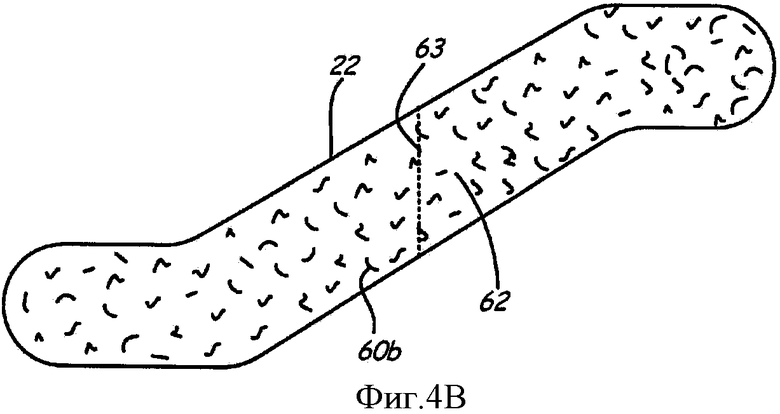
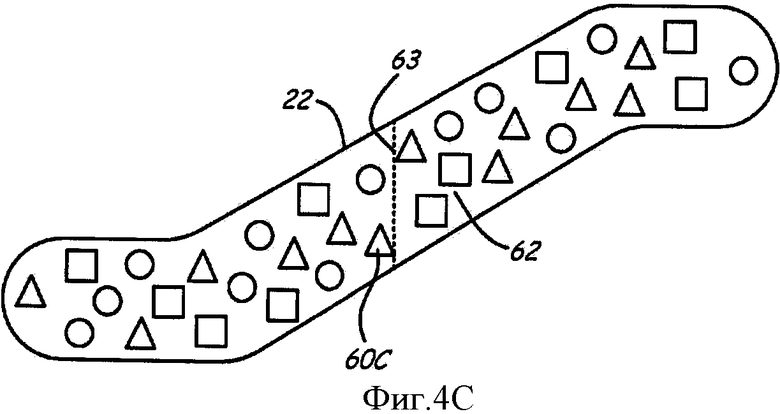
На Фиг.4А-4С показаны схемы, иллюстрирующие типовые конфигурации проводящего материала на перилах пассажирского транспортера.
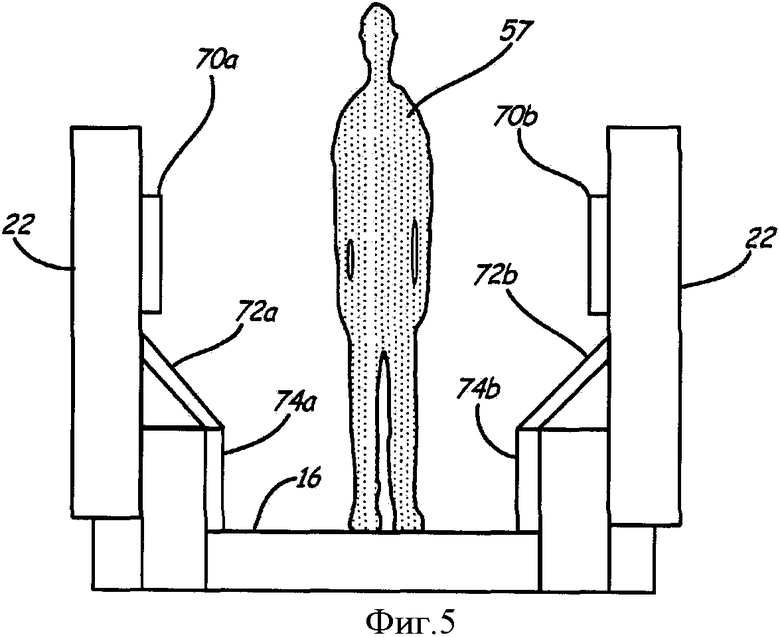
На Фиг.5 показана схема, иллюстрирующая альтернативную конфигурацию электродов на пассажирском транспортере.
ПОДРОБНОЕ ОПИСАНИЕ
Настоящее изобретение относится к обнаружению местоположения человека относительно пассажирского транспортера, такого как эскалатор, движущаяся дорожка и т.п. Фиг.1 представляет собой вид в перспективе эскалатора 10, который содержит первую площадку 12, вторую площадку 14, замкнутый контур ступеней 16, поручни 18, перила 22, ограничивающие между собой область для транспортирования пассажиров, приводную систему 24 и машинные отделения 26, 28. Ступени 16 проходят от первой площадки 12 ко второй площадке 14. Перила 22 проходят вдоль стороны ступеней 16 от первой площадки 12 ко второй площадке 14, и поручни 18 взаимодействуют с возможностью перемещения с каждыми перилами 22. Приводная система 24 выполнена с возможностью привода ступеней 16 и поручней 18 с постоянной скоростью и синхронно друг с другом. Первая часть приводной системы 24 расположена в машинном отделении 26, и вторая часть приводной системы 24 расположена в машинном отделении 28.
Настоящее изобретение относится к обнаружению местоположения человека относительно эскалатора 10. В любое данное время человек может быть расположен в области для транспортирования пассажиров между перилами 22, когда едет по эскалатору 10, или может быть расположен в машинных отделениях 26, 28 или между перилами 22, когда проводит техническое обслуживание, в то время как эскалатор не находится в движении. На основании местоположения человека может быть желательно запустить или остановить приводную систему 24, или предотвратить приводную систему 24 от запуска по причинам эффективности и безопасности. Настоящее изобретение обнаруживает местоположение человека относительно эскалатора 10, используя электрические поля, и передает эту информацию схеме обнаружения для того, чтобы определить, есть ли необходимость запуска или остановки приводной системы 24.
Фиг. 2 представляет собой блок-схему системы 30 обнаружения согласно варианту реализации настоящего изобретения. Система 30 обнаружения содержит управляющую схему 32 (которая содержит генератор 34, усилитель 36, устройство 37 выбора режима и цепь 38 согласования импеданса), емкостный датчик 40 и схему 42 обнаружения. Схема 42 обнаружения содержит компаратор 44 и контроллер 45 и находится в связи с логической схемой 46 эскалатора 10.
Контроллер 45 подает ток на генератор 34, который генерирует электрический сигнал 50. Управляющий сигнал от контроллера 45 также направляется устройству 37 выбора режима для задания режима устройству 37 выбора режима для приведения емкостного датчика 40 в один из трех режимов: режим поглощения, режим передачи или режим нагрузки.
Генератор 34 обычно представляет собой генератор на базе кристалла (пьезоэлектрик) или приводится в действие непосредственно выходным сигналом контроллера 45. Генератор 34 может работать в диапазоне от 100 кГц до 1 МГц, но предпочтительно работает между 100-150 кГц. Электрический сигнал 50, создаваемый генератором 34, представляет собой колебательный управляющий сигнал малой мощности, который ограничен по мощности до 500 мВт. Электрический сигнал 50 усиливается усилителем 36 и передается емкостному датчику 40 через устройство 37 выбора режима и цепь 38 согласования импеданса, которая может быть выполнена с одним или более варакторами в типовом варианте реализации изобретения. Цепь 38 согласования импеданса управляется выходным сигналом контроллера 45 и обеспечивает эффективную доставку электрического сигнала 50 емкостному датчику 40, несмотря на изменения емкости датчика 40. Электрический сигнал 50 подается на емкостный датчик 40 для создания статического электрического поля 52 между первым электродом 54 и вторым электродом 56 емкостного датчика 40.
Когда человек расположен между первым электродом 54 и вторым электродом 56, происходит искажение квазистатического электрического поля 52. Это искажение обнаруживается при помощи схемы 42 обнаружения. Схема 42 обнаружения содержит компаратор 44 и контроллер 45, в связи с логической системой 46. На основе выходного сигнала, полученного от емкостного датчика 40, компаратор 44 выдает разность напряжений между первым электродом 54 и вторым электродом 56 к контроллеру 45. Контроллер 45 представляет собой микропроцессор, который выполняет алгоритмы, которые используются для обработки выходного сигнала компаратора 44. Эти алгоритмы обрабатывают выходной сигнал компаратора 44, используя несколько режимов обнаружения в нескольких вариантах реализации изобретения (подробно обсуждаемых ниже в отношении фиг.3A-3F), для поиска шаблонов и емкостных разниц с течением времени для индикации присутствия человека, людей или других условий. Контроллер 45 связан с логической системой 46. На основе обнаруженных изменений емкости емкостного датчика 40 контроллер 45 и логическая система 46 определяют, необходимо ли изменение режима работы пассажирского транспортера (например, запуск, остановка или замедление пассажирского транспортера или даже предотвращение запуска пассажирского транспортера).
Эта система работает исходя из условия, что диэлетрическая проницаемость человека существенно выше, чем диэлектрическая проницаемость воздуха. Уравнение для емкости следующее:
где С - емкость в фарадах, εr - диэлектрическая проницаемость (или относительная диэлектрическая проницаемость) объекта между первым электродом 54 и вторым электродом 56, εo - диэлектрическая проницаемость вакуума (8,854×10-12 Ф/м), А - зона, которую перекрывают первый электрод 54 и второй электрод 56, в квадратных метрах, и d - расстояние между первым электродом 54 и вторым электродом 56 в метрах. Диэлектрическая проницаемость εr для воздуха примерно равна 1,00. Диэлектрическая проницаемость εr для человека ориентировочно находится в диапазоне между 60 и 90 в зависимости от различных факторов. Таким образом, емкость емкостного датчика 40 существенно изменится, когда между первым электродом 54 и вторым электродом 56 будет человек. Это изменение емкости будет обнаружено схемой 42 обнаружения. Материалы, близкие по диэлектрической проницаемости к воздуху, такие как бумага (εr=3,5) или резина (εr=7), не вызовут большого изменения емкости, и таким образом не могут быть обнаружены (хотя некоторые научные тексты указывают, что экспериментальные исследования показали, что может быть обнаружено такое малое изменение емкости, как 0,05×10-18 Ф).
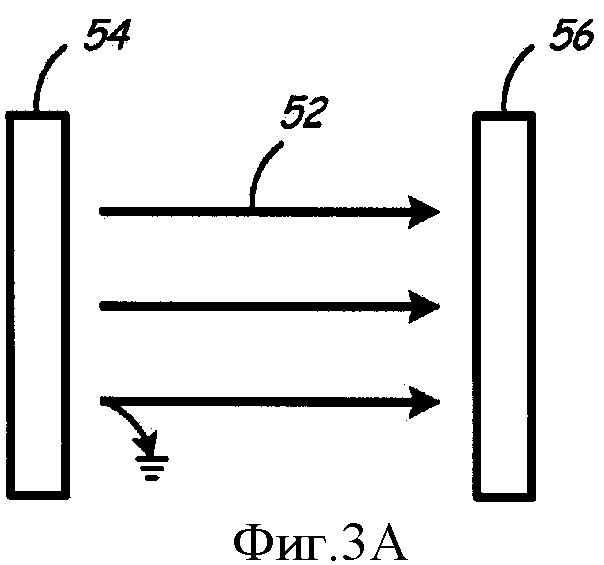
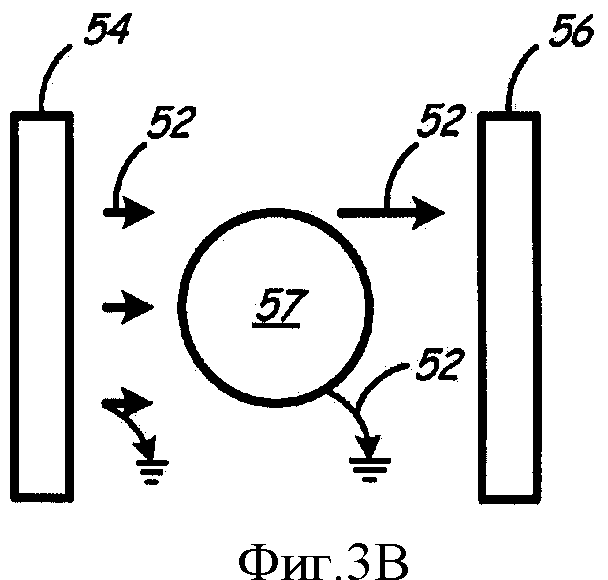
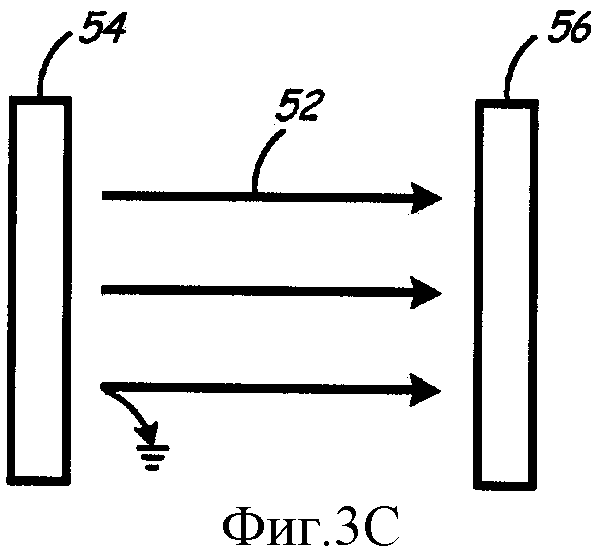
Как было упомянуто выше, емкостный датчик 40 и схема 42 обнаружения могут работать в любом из трех режимов обнаружения. Эти режимы представляют собой режим поглощения (или шунта), режим передачи и режим нагрузки. Фиг.3A-3F представляют собой схемы, подробно иллюстрирующие эти три режима обнаружения.
Фиг.3А-3В изображают емкостный датчик 40 в режиме поглощения. Первый электрод 54 вырабатывает электрическое поле 52 (например, квазистатическое электрическое поле) в направлении второго электрода 56. Когда между первым электродом 54 и вторым электродом 56 никого нет, второй электрод 56 принимает электрическое поле 52 с устойчивой интенсивностью (с частью электрического поля 52, шунтированного на землю). Когда тело 57 (такое как человек или другой объект) присутствует между первым электродом 54 и вторым электродом 56, как показано на фиг.3В, электрическое поле 52 искажается таким образом, что второй электрод 56 принимает ослабленное электрическое поле 52, так как часть электрического поля 52 шунтируется через тело 57 на землю и не достигает второго электрода 56.
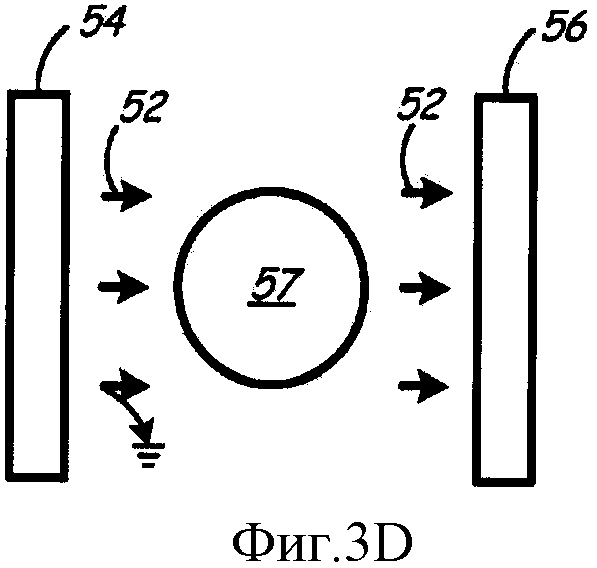
Фиг.3C-3D изображают емкостный датчик 40 в режиме передачи. Первый электрод 54 вырабатывает электрическое поле 52 (например, квазистатическое электрическое поле) в направлении второго электрода 56 (с частью электрического поля 52, шунтированного на землю). Когда между первым электродом 54 и вторым электродом 56 никого нет, емкость между первым электродом 54 и вторым электродом 56 имеет постоянное значение. Когда тело 57 (такое как человек или другой объект) присутствует между первым электродом 54 и вторым электродом 56, как показано на фиг.3D, источником электрического поля становится комбинация первого электрода 54 и тела 57, емкостно соединенных друг с другом, и емкость между этим источником электрического поля и вторым электродом 56 меняется в зависимости от характеристик и местоположения тела 57.
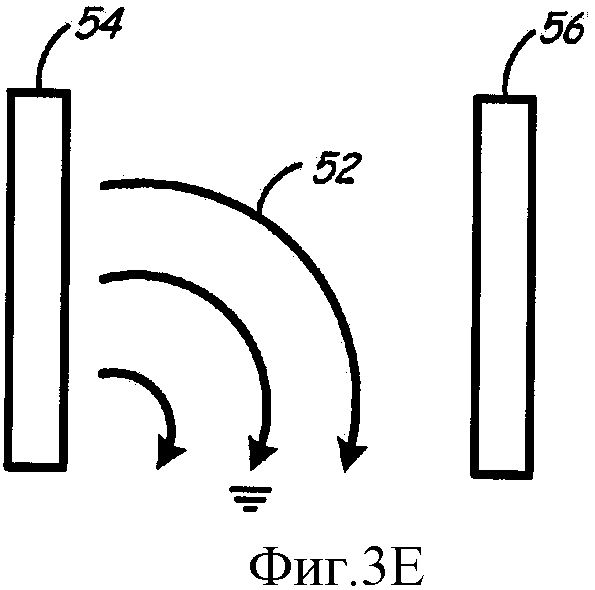
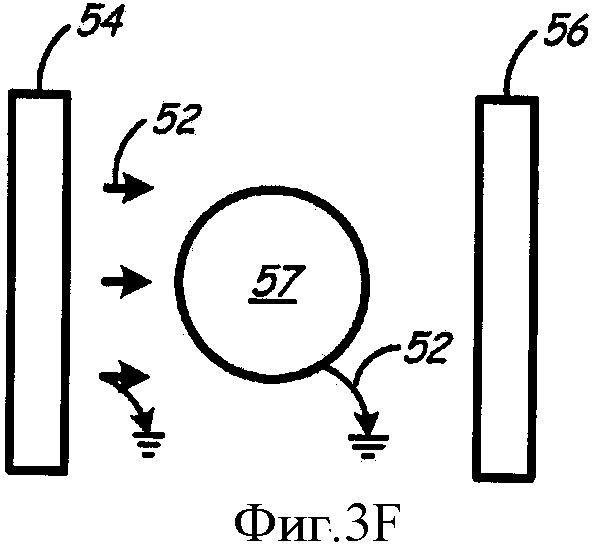
Фиг.3E-3F изображают емкостный датчик 40 в режиме нагрузки. Первый электрод 54 вырабатывает электрическое поле 52 (например, квазистатическое электрическое поле), по меньшей мере часть которого шунтируется на землю (второй электрод 56 не функционирует в качестве емкостного датчика в этом режиме). Когда тело 57 (такое как человек или другой объект) присутствует вблизи первого электрода 54 (т.е. между первым электродом 54 и вторым электродом 56), как показано на фиг.3F, электрическое поле 52 искажается и шунтируется на землю через тело 57, вызывая появление эффекта обнаруживаемой нагрузки, который изменяется в зависимости от емкости между первым электродом 54 и телом 57 на основании характеристик и местоположения тела 57. В этом режиме второй электрод 56 может также вырабатывать электрическое поле вместо или в дополнение к первому электроду 54.
Существуют по меньшей мере два применения для использования этой технологии в пассажирских транспортерах: обнаружение человека на эскалаторе 10 (в частности, между перилами 22) и обнаружение человека в машинном отделении 26, 28. Схема, описанная выше и показанная на фиг.2, применима для обоих этих применений, с незначительными изменениями в реализации емкостного датчика 40. Когда обнаруживаемый человек является пассажиром на эскалаторе 10, перила 22 формируют или поддерживают первый и второй электроды 54, 56 емкостного датчика 40. Когда обнаруживаемый человек является обслуживающим персоналом в машинных отделениях 26, 28, сигнальный провод действует в качестве первого электрода, а заземленное машинное оборудование действует в качестве второго электрода 56 для формирования емкостного датчика 40. Особенности каждого из этих применений будут подробно описаны ниже.
Для обнаружения человека между перилами 22 пассажирского транспортера, с перилами 22, формирующими емкостный датчик 40, для создания емкостного датчика 40 для каждых перил 22 применяется проводящий материал. Это особенно применимо для перил, имеющих непроводящие поверхности, такие как стеклянные поверхности. Это важно, что проводящий материал по существу отделен от любых металлических частей, окружающих непроводящие поверхности перил 22, так как эти металлические части действуют преимущественно в качестве земли. Если проводящий материал находится слишком близко к металлическим частям, электрические сигналы могут шунтироваться на эти заземленные металлические части, и таким образом снижается диапазон и чувствительность системы обнаружения. Однако допустимо, чтобы ограниченное количество небольших секций системы обнаружения приближались к проводящим частям перил для создания необходимых соединений в схеме.
Фиг.4А-4С представляют собой схемы, иллюстрирующие несколько типовых способов, в которых проводящий материал 60 может быть нанесен на непроводящую поверхность 62 перил 22 для создания емкостного датчика 40. Фиг.4А изображает вариант реализации изобретения, в котором на непроводящую поверхность 62 перил 22 нанесена ячеистая или прозрачная проводящая пленка 60а. Эта ячеистая или прозрачная проводящая пленка 60а может быть применена в процессе изготовления непроводящей поверхности 62, или может быть применена на непроводящую поверхность 62 позже для модификации существующих пассажирских транспортеров. Фиг. 4В изображает вариант реализации изобретения, в котором само стекло содержит проводящие элементы 60b, формирующиеся в процессе изготовления этого стекла. Фиг.4С изображает вариант реализации изобретения, в котором на непроводящей поверхности 62 прикреплены проводящие переводные картинки 60с. Когда другие способы могут использоваться для применения проводящего материала 60 на непроводящую поверхность 62 каждых перил 22, при этом важно, чтобы проводящий материал 60 не приближался слишком близко к любым металлическим частям, окружающим непроводящую поверхность 62, так как эти металлические части действуют преимущественно в качестве земли. Если проводящий материал приближается слишком близко к этим заземленным зонам, сигнал может шунтироваться на эти заземленные области, что в результате понизит чувствительность и диапазон. Для применений, где перила 22 являются металлическими, будет необходимо их электрически изолировать от противоположных перил 22.
Как обсуждалось выше, зона перил 22 (в частности, поверхностная зона проводящего материала 60, расположенного на перилах 22) непосредственно влияет на изменение емкости (и таким образом на чувствительность обнаружения), когда человек приближается к перилам 22 или находится между ними. На более длинных эскалаторах, протяженность проводящей поверхности может стать в некоторой степени резонирующей и действовать подобно антенне. В таких случаях, на перилах 22 может существовать распространяющееся электрическое поле и быть помехой для окружающих электронных устройств. В таких применениях, проводящая поверхность 60 может быть разделена по меньшей мере на две секции на каждой внутренней поверхности перил 22, как изображено при помощи произвольной разделительной линии 63. Добавление мультиплексора в схему 42 обнаружения может позволить этим секциям быть в связи с другими компонентами схемы 42 обнаружения. Альтернативно, множественные компараторы 44 могут быть использованы для того, чтобы позволить этим секциям быть в связи с контроллером 46.
В процессе работы, когда изменение емкости обнаружено при помощи емкостного датчика 40 вследствие присутствия человека на эскалаторе 10, схема 42 обнаружения может определить, нужно ли изменять работу эскалатора 10. Например, по мере того, как человек приближается к эскалатору 10 и входит в пространство между перилами 22, эскалатор 10 может «пробудиться» из низкоэнергетического или энергосберегающего режима, и войти в обычный транспортный режим, немедленно или постепенно от замедленной скорости. Если человек находится на эскалаторе 10, и случилась аварийная ситуация, эскалатор 10 может войти в режим мягкой остановки для того, чтобы предотвратить резкую остановку. Также, если человек находится на остановленном эскалаторе 10, обнаружение человека может быть использовано для предотвращения запуска эскалатора 10.
Система 30 обнаружения может также использоваться для обнаружения человека в машинных отделениях 26, 28. Каждое из машинных отделений 26, 28 расположено вблизи ступеней 16 и перил 22 (как показано на фиг.1). Для того чтобы обнаружить человека в машинных отделениях 26, 28, приводная система 24 и/или другие электропроводные компоненты внутри каждого машинного отделения 26, 28 заземлены. Сигнальный провод (не показан) установлен в машинном отделении 26, 28 (предпочтительно на серединной высоте) и изолирован от земли, для формирования первого электрода 54. Указанные заземленные компоненты формируют второй электрод 56. Та же схема, обсужденная выше со ссылками на фиг.2, также используется для создания электрического поля 52 в применении для машинных отделений.
Когда в машинном отделении 26 никого нет, емкость между сигнальным проводом и заземленными компонентами, такими как приводная система 24, является постоянной. Когда в машинное отделение 26 проникает человек или другой объект, емкость между сигнальным проводом и заземленными компонентами, такими как приводная система 24, изменяется вследствие разницы между диэлектрической постоянной или проницаемостью человека и диэлектрической проницаемостью воздуха. Это изменение емкости обнаруживается при помощи схемы 42 обнаружения тем же или подобным способом, как описано выше со ссылкой на фиг.2. Если человек обнаруживается в машинном отделении 26, работа эскалатора 10 выключена (т.е. вся мощность отключена от двигателя для обеспечения того, чтобы не двигались никакие части).
Каждое из этих двух применений (т.е. создание емкостного датчика между перилами или в машинном отделении) могут использовать отдельные схемы, конфигурированные как показано на фиг. 2 или могут совместно использовать схемы. Дополнительные схемы и датчики, которые известны из уровня техники, могут быть также включены во избежание вредного воздействия, которое могут оказать изменения условий (например, температуры и влажности) на конфигурацию емкостного датчика.
Фиг.5 представляет собой схему, иллюстрирующую альтернативную конфигурацию электродов на пассажирском транспортере для выполнения системы обнаружения настоящего изобретения. Первый электрод 54 и второй электрод 56 (фиг.2) могут быть расположены на перилах 22 (как показано в местоположениях 70а и 70b), могут быть расположены на внутреннем настиле пассажирского транспортера (как показано в местоположениях 72а и 72b), могут быть расположены на внутреннем фартуке пассажирского транспортера (как показано в местоположениях 74а и 74b) или могут быть расположены в комбинации одного или более этих местоположений. В любой из этих конфигураций необходима соответствующая электрическая изоляция этих электродов для достижения функциональности емкостного датчика системы обнаружения. Ступени 16 или ступени 16 и сопутствующая ступеням цепь используются в типовых вариантах реализации изобретения для обеспечения электрически изолированной связи с постоянным потенциалом (таким как земля), с электродом, соединенным для реализации вышеописанного режима нагрузки для обнаружения.
Хотя настоящее изобретение было описано со ссылками на типовой(-ые) вариант(-ы) реализации изобретения, специалисту в данной области понятно, что возможны различные изменения и замена эквивалентных элементов без выхода за рамки объема изобретения. Кроме того, возможны многие модификации для адаптации частной ситуации или материала к идее настоящего изобретения без выхода за рамки сущности и объема настоящего изобретения. Таким образом, подразумевается, что настоящее изобретение не ограничивается изложенными частными вариантами реализации и что настоящее изобретение включает все варианты реализации, находящиеся в рамках объема предлагаемой формулы изобретения.
Изобретение относится к области управления эскалаторами. Система (30) для обнаружения человека относительно пассажирского транспортера содержит управляющую схему (32) для подачи колебательного управляющего сигнала (50), емкостный датчик (40), схему обнаружения (42), контроллер (45). Емкостный датчик (40) содержит первый электрод (54), выполненный с возможностью выработки электрического поля (52) в направлении второго электрода (56) в ответ на указанный колебательный управляющий сигнал (50). С помощью схемы обнаружения (42), соединенной с емкостным датчиком (40), распознают изменение его емкости и вырабатывают выходной сигнал в зависимости от емкости. С помощью контроллера (45), чувствительного к сигналу схемы обнаружения (42), осуществляют избирательное регулирование режима работы пассажирского транспортера. Первый (54) и второй (56) электроды расположены на участках конструктивного компонента пассажирского транспортера на противоположных сторонах области для транспортирования пассажиров, а изменение емкости обусловлено присутствием человека в электрическом поле (52) между первым (54) и вторым (56) электродами. Достигается повышение безопасности. 4 н. и 19 з.п. ф-лы, 5 ил.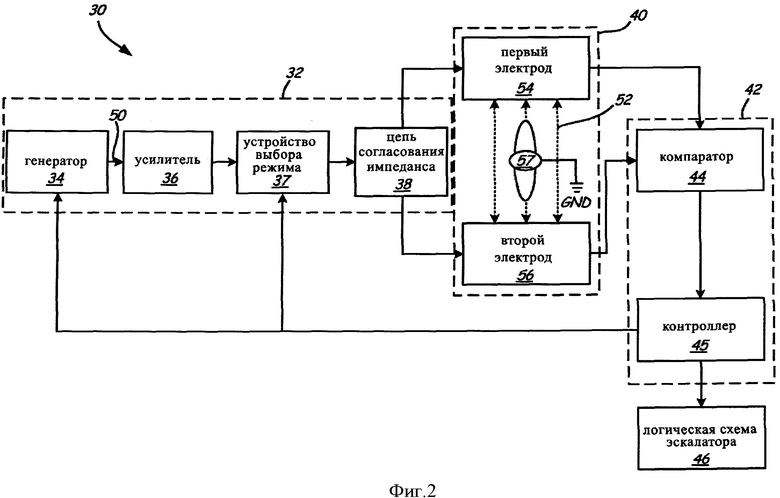
1. Система для обнаружения человека относительно пассажирского транспортера, содержащего конструктивный компонент и область для транспортирования пассажиров, содержащая:
управляющую схему для подачи колебательного управляющего сигнала;
емкостный датчик, содержащий первый электрод, выполненный с возможностью выработки электрического поля в направлении второго электрода в ответ на указанный колебательный управляющий сигнал;
схему обнаружения, соединенную с емкостным датчиком, распознающим изменение его емкости и вырабатывающим выходной сигнал в зависимости от емкости; и
контроллер, чувствительный к выходному сигналу схемы обнаружения, для избирательного регулирования режима работы пассажирского транспортера,
при этом первый и второй электроды расположены на участках конструктивного компонента пассажирского транспортера на противоположных сторонах области для транспортирования пассажиров, а изменение емкости обусловлено присутствием человека в электрическом поле между первым и вторым электродами.
2. Система по п.1, в которой первый электрод содержит проводящий материал, расположенный на конструктивном компоненте пассажирского транспортера на первой стороне области для транспортирования пассажиров, а второй электрод содержит проводящий материал, расположенный на конструктивном компоненте пассажирского транспортера на второй стороне области для транспортирования пассажиров противоположно указанной первой стороне.
3. Система по п.1, в которой конструктивный компонент пассажирского транспортера является перилами, первый электрод содержит проводящую поверхность указанных перил на одной стороне области для транспортирования пассажиров, а второй электрод содержит проводящую поверхность указанных перил на противоположной стороне области для транспортирования пассажиров.
4. Система по п.3, в которой перила сформированы из непроводящего материала, а проводящий материал расположен на поверхности перил на противоположных сторонах области для транспортирования пассажиров.
5. Система по п.4, в которой непроводящий материал представляет собой стекло.
6. Система по п.4, в которой проводящий материал приклеен к поверхности непроводящих перил.
7. Система по п.4, в которой проводящий материал сформирован за одно целое с непроводящими перилами.
8. Система по п.4, в которой проводящий материал разделен на несколько секций.
9. Система по п.8, в которой мультиплексор соединяет указанные секции для передачи выходного сигнала емкостного датчика в схему обнаружения.
10. Система по п.1, в которой управляющая схема, кроме того, содержит:
генератор для создания колебательного управляющего сигнала;
усилитель, соединенный с генератором, для усиления колебательного управляющего сигнала;
цепь согласования импеданса, подсоединенную между указанными усилителем и емкостным датчиком; и
устройство выбора режима, выполненное с возможностью приведения емкостного датчика в выбранный режим.
11. Система по п.10, в которой частота генератора находится в диапазоне от 100 кГц до 1 МГц.
12. Система по п.10, в которой частота генератора находится в диапазоне от 100 кГц до 150 кГц.
13. Система по п.1, в которой схема обнаружения содержит:
компаратор, выполненный с возможностью восприятия изменения емкости емкостного датчика и выработки выходного сигнала в зависимости от емкости емкостного датчика.
14. Система для обнаружения человека относительно пассажирского транспортера, содержащего конструктивный компонент и область для транспортирования пассажиров, содержащая:
управляющую схему для подачи колебательного управляющего сигнала;
емкостный датчик, содержащий первый электрод, выполненный с возможностью выработки электрического поля в направлении второго электрода в ответ на указанный колебательный управляющий сигнал;
схему обнаружения, соединенную с емкостным датчиком, распознающим изменение его емкости и вырабатывающим выходной сигнал в зависимости от емкости; и
контроллер, чувствительный к выходному сигналу схемы обнаружения, для избирательного регулирования режима работы пассажирского транспортера,
причем первый электрод содержит сигнальный провод, расположенный в машинном отделении пассажирского транспортера, а второй электрод содержит заземленный компонент внутри указанного машинного отделения.
15. Способ обнаружения пассажира между первыми и вторыми перилами пассажирского транспортера, включающий:
подачу электрического сигнала первому электроду на первых перилах для генерации электрического поля между первым электродом и вторым электродом на вторых перилах, противоположных первым перилам;
обнаружение изменения емкости между первым и вторым электродами и
управление работой пассажирского транспортера в зависимости от обнаруженного изменения емкости.
16. Способ по п.15, в котором изменение емкости обусловлено присутствием человека в электрическом поле между первым и вторым электродами.
17. Способ по п.15, в котором первый электрод содержит проводящий материал, расположенный на поверхности первых перил, и второй электрод содержит проводящий материал, расположенный на поверхности вторых перил.
18. Способ по п.15, в котором электрический сигнал представляет собой колебательный управляющий сигнал малой мощности.
19. Способ по п.15, в котором электрический сигнал имеет частоту в диапазоне от 100 кГц до 1 МГц.
20. Способ обнаружения человека в машинном отделении пассажирского транспортера, включающий:
передачу электрического сигнала сигнальному проводу, расположенному в машинном отделении, для создания электрического поля между указанным проводом и электропроводящим компонентом внутри машинного отделения, электрически изолированным от сигнального провода;
обнаружение изменения емкости между сигнальным проводом и электропроводящим компонентом и
управление работой пассажирского транспортера в зависимости от обнаруженного изменения емкости.
21. Способ по п.20, в котором изменение емкости обусловлено присутствием человека в электрическом поле между сигнальным проводом и электропроводящим компонентом.
22. Способ по п.20, в котором электрический сигнал представляет собой колебательный управляющий сигнал малой мощности.
23. Способ по п.20, в котором электрический сигнал имеет частоту в диапазоне от 100 кГц до 1 МГц.

