Изобретение относится к области транспортных средств, а точнее летательных аппаратов вертикального взлета и посадки для перемещения над поверхностью воды.
Имеются вертолеты, базирующиеся на судах, для перемещения над водной поверхностью, которые имеют высокую маневренность и скорость передвижения. Но вертолеты очень уязвимы от попадания воды на несущие винты, из-за чего их невозможно использовать близ поверхности воды при ее сильном волнении. А при использовании вертолета в боевых условиях несущие винты вследствие их значительных размеров уязвимы от поражающего действия оружия.
Аналогом предлагаемого устройства является изобретение, описанное в британском патенте GB 2238376 (A) «Remotely-piloted airborne platform system» (перевод: «Система дистанционно-управляемой бортовой платформы»), изобретатель: BLAIN WILLIAM, МПК: В64С 15/00; В64С 39/02; F41J 9/10; (IPC1-7): В64С 15/00; B64F 3/00; F41H 11/00. В аналоге имеется корпус для размещения в ней полезной нагрузки, гибкий шланг, насос, по крайней мере, одно управляемое сопло и система управления. Работа аналога осуществляется таким образом. Насос забирает воду из резервуара или из моря и по гибкому шлангу подает в устройство под определенным давлением. Далее вода, пройдя через сопла, отбрасывается вниз и тем самым создает силу реакции, достаточную для удержания устройства вместе с гибким шлангом, наполненным водой, на весу в равновесном положении. Как указано в патенте GB 2238376 (А), насос располагается на борту корабля, длина гибкого шланга имеет определенную длину. Следовательно, устройство имеет ограничение на удаление от корабля. Еще одно устройство, которое можно принять в качестве прототипа предлагаемого устройства, описано в американском патенте US 2010200702 (A1) «Personal propulsion device» (перевод: «Персональное движительное устройство»), изобретатель: LI RAYMOND, МПК: В64С 39/02. Это устройство предназначено для обеспечения полета над поверхностью воды одного оператора с помощью специальной системы управления. В прототипе так же как в аналоге вода подается по гибкому шлангу к оператору и выбрасывается вниз через не менее чем два сопла. При этом создается подъемная сила, удерживающая оператора над водой. Но в отличие от аналога в прототипе насос с двигателем, бак с горючим располагаются в отдельном базовом блоке, свободно плавающем на поверхности воды. Тем самым достигается большая свобода перемещения оператора над поверхностью воды, чем в устройстве аналога. Устройство прототипа больше всего имеет аттракционную направленность, потому что оно прежде всего персональное, т.е. служит для перемещения одного оператора. Если попытаться развить с помощью данного устройства максимально возможную скорость, то оператору через гибкий шланг придется тянуть за собой тяжелый базовый блок, который, как видно из описания прототипа, похож на небольшую лодку. В этом случае все преимущество прототипа в сравнении с обычной лодкой с водометным движителем теряется.
Задачей данного изобретения является создание транспортного средства для перемещения над и вдоль водной поверхности, обладающего высокой маневренностью, быстроходностью и компактными размерами. Поставленная задача решается тем, что устройство выполняется из одного или большего числа водометов с одним или большим числом раздельных или объединенных между собой входных и выходных частей водометов, систему управления, отличающееся тем, что при работе водометов имеется возможность удержания и перемещения над поверхностью воды летательного аппарата с водометом, у которого под поверхностью воды при этом остаются лишь участки входных частей водометов с приемными отверстиями водометов, расположенными на минимально достаточной глубине. При этом в летательном аппарате с водометом имеется также кабина для размещения в ней пилотов и грузов, система стабилизации, а все части летательного аппарата с водометом объединены между собой. Как указано в источнике [1] на стр.188, водометный движитель или кратко просто водомет, судовой движитель, у которого сила, движущая судно, создается выталкиваемой из него струей воды. Водометный движитель представляет собой профилированную трубу (водовод), в которой водяной поток ускоряется лопастным механизмом (гребной винт, крыльчатка насоса), энергией сгорания топлива или давлением сжатого газа и обеспечивается направленный выброс струи. Назовем часть водовода водомета, через которую поступает вода в водомет входной частью водомета, а ту часть водовода водомета, через которую вода, ускоряемая в водомете, выталкивается за пределы водомета выходной частью водомета. Под приемным отверстием водомета будем понимать сечение входной части водомета, через которое в нее поступает вода, а под выходным сечением водомета - сечение выходной части водомета, через которое происходит выброс воды из водомета. Вода поступает в водовод через приемное отверстие, которое располагается ниже уровня воды. Обычно, согласно источнику [2] (стр.10), реакция струи, выбрасываемой водометом, направленной в сторону, противоположную движению судна, и является силой, движущей судно. То есть в обычных судах с водометным движителем направление выброса струи воды из водомета практически параллельно водной поверхности или поверхности горизонта и сила тяги водомета используется только на движение судна вдоль поверхности воды. В предлагаемом устройстве направление выброса струи воды из водомета практически (с небольшим отклонением) вертикально направлено сверху вниз: вода как обычно поступает через приемное отверстие в водовод, поднимается по нему, ускоряется (например, в лопастном механизме) и выбрасывается сверху вниз. Благодаря такому выбросу струи воды из водомета, сила тяги водомета, при достижении значения, достаточного для подъема летательного аппарата с водометом (далее сокращенно ЛАВ), поднимает ЛАВ основной своей частью над поверхностью воды, причем на такую высоту, что под поверхностью воды остается лишь участок входной части водомета с приемным отверстием водомета, расположенной в самой нижней части ЛАВ. То есть при этом ЛАВ почти полностью поднимается над поверхностью воды, а приемное отверстие входной части водомета остается ниже уровня поверхности воды, что является обязательным условием работоспособности водомета. Чем больше глубина расположения приемного отверстия водомета, тем устойчивее будет работать водомет, т.е. в водовод не будет поступать воздух и мусор с поверхности воды. Но в то же самое время эта глубина должна быть минимальной, т.к. чем глубже находится приемное отверстие водомета, тем больше будет сила сопротивления воды при перемещении ЛАВ вдоль водной поверхности. Поэтому, под минимально достаточной глубиной расположения приемного отверстия водомета понимается минимальная глубина его расположения под поверхностью воды после подъема основной части ЛАВ над поверхностью воды, при котором обеспечивается устойчивая работа водомета и минимальное сопротивление воды при движении ЛАВ вдоль водной поверхности. Водомет может быть жестко соединен с корпусом транспортного средства, а может иметь некоторую автономность, т.е. подвижность относительно ЛАВ (способность поворачиваться или перемещаться). Под системой управления ЛАВ понимается система, позволяющая изменять величину и направление действия силы тяги водомета. Система управления ЛАВ может иметь различную конструкцию. Для изменения величины силы тяги можно изменять скорость вращения рабочего органа водомета, а для изменения направления силы тяги можно использовать различные управляемые отклоняющиеся поверхности - рули, устанавливаемые вблизи выходного сечения водомета, при повороте которых изменяется направление выбрасываемого потока воды из водомета. Используя такие рули, можно отклонить ЛАВ от вертикального положения, что приведет к возникновению горизонтальной составляющей силы тяги водомета. Эта сила приведет к перемещению ЛАВ в горизонтальном направлении. Естественно, при отклонении ЛАВ от вертикали для поддержания ЛАВ в равновесии с силой тяжести силу тяги водомета необходимо увеличить на некоторую величину. Спуск ЛАВ на поверхность воды (приводнение) осуществляется в порядке, обратном подъему. То есть вначале уменьшают горизонтальную составляющую скорости ЛАВ, уменьшая одновременно силу тяги водомета и угол отклонения вектора силы тяги водомета от вертикали. После остановки ЛАВ, немного уменьшив силу тяги водомета, производят его приводнение. Входная часть водомета и выходная часть водомета может иметь различную форму и сечение по длине. Для уменьшения сопротивления воды при движении ЛАВ входная часть водомета, контактирующая с водой, может иметь внешнюю форму, обеспечивающую наименьшее сопротивление набегающего потока воды. Для уменьшения потерь скоростного напора набегающего потока воды на приемное отверстие входной части водомета оно может быть выполнено направленной по направлению движения ЛАВ. Количество водометных движителей в предлагаемом устройстве может быть не одно, а несколько. Входные части и(или) выходные части нескольких водометов могут быть раздельными или объеденными между собой. У каждого водомета может быть не один, а несколько входных и(или) выходных частей. Для привода водометов могут использоваться различные типы двигателей (ДВС, электрические и т.д.). Предлагаемое устройство может содержать систему стабилизации, под которой понимается система, обеспечивающая устойчивое положение устройства в надводном положении. Эта система может быть конструктивно встроенной, когда центр приложения равнодействующей силы тяги водомета находится выше центра масс ЛАВ (с учетом веса воды в водомете). В этом случае при каком-либо отклонении ЛАВ от равновесного положения, возникает сила, стремящаяся вернуть ЛАВ в равновесное положение. Система стабилизации может работать также и по следящему принципу, когда приборы отслеживают отклонение ЛАВ от равновесного положения и при наличии таких отклонений, превышающих предельное, дают соответствующую команду на органы управления для устранения возникших отклонений. Система стабилизации также может отслеживать и обеспечить такое положение ЛАВ над водной поверхностью, при котором приемное отверстие находилось бы под водой на требуемой минимально достаточной глубине. В отличие от аналога и прототипа ЛАВ имеет кабину для размещения в ней пилотов и пассажиров, а также может иметь отдельный грузовой отсек. Наличие такой кабины позволяет использовать ЛАВ как транспортное средство для перевозки людей и грузов. Все части летательного аппарата с водометом объединены между собой. Это значит, что они при движении ЛАВ двигаются вместе и все части ЛАВ двигаются относительно водной поверхности с одной скоростью в отличие от прототипа, в котором оператор может двигаться относительно свободно от его базовой части.
Предлагаемое устройство по функциональным качествам имеет сходство с вертолетом. В рабочем положении ЛАВ поднимается над поверхностью воды почти полностью, под водой находится лишь небольшой участок входной части водомета с приемным отверстием. Но в отличие от вертолета размер водомета намного меньше размеров несущего винта вертолета, и значит габариты предлагаемого ЛАВ много меньше габаритов вертолета и он не «боится» ударов волн, а также ЛАВ может свободно садиться на поверхность воды практически при любых погодных условиях. Как известно, водометные движители более экономичны в сравнении с воздушными винтами, т.к. вода в отличие от воздуха не сжимаема. Недостатком ЛАВ в сравнении с вертолетом является то, что предлагаемое устройство имеет ограниченную высоту подъема и ввиду того, что входная часть водомета касается водной поверхности, сопротивление движению ЛАВ будет несколько больше, чем у вертолета. Но в сравнении с любым плавающим транспортным средством это сопротивление движению будет намного меньше, т.к. основная часть ЛАВ находится над водной поверхностью - в воздухе.
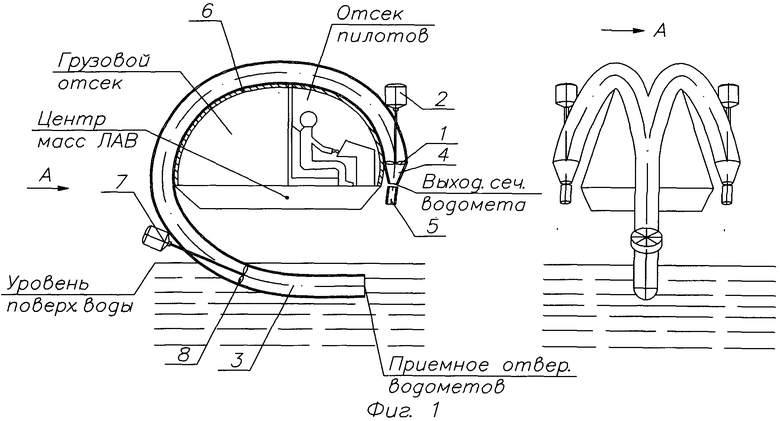
Вариант предлагаемого устройства, изображенного на Фиг.1, состоит из двух водометов, у которых рабочими органами поз.1 являются лопаточные колеса как у лопаточного насоса, приводимые во вращение двигателями ДВС поз.2. Входные части поз.3 водометов имеют по ходу движения в них рабочего тела вначале общий начальный участок с одним приемным отверстием, а далее «раздваиваются» и таким образом подводят рабочее тело отдельно к каждому водомету. Выходные части поз.4 водометов разнесены между собой и расположены выше общего центра масс ЛАВ для обеспечения устойчивости ЛАВ в вертикальной плоскости. У выходных сечений выходных частей поз.4 водометов располагаются отклоняемые трубчатого типа рули поз.5, при повороте которых изменяется направление отбрасываемых водяных струй, исходящих из выходных сечений водометов, обеспечивая тем самым управление ЛАВ. По команде пилота рули поз.5 с помощью специальных приводов, которые не показаны на Фиг.1, могут отклоняться в любую сторону относительно выходных сечений водометов. Причем рули обоих водометов могут поворачиваться как совместно, так и отдельно друг от друга. Имеется кабина поз.6, в которой находится отсек пилотов и грузовой отсек, в котором могут размещаться грузы и пассажиры. Снизу кабина поз.6 имеет герметичный корпус, который в состоянии покоя ЛАВ обеспечивает ему плавучесть на поверхности воды. На Фиг.1 показан двигатель поз.7, который приводит во вращение лопасти поз.8, расположенные ниже уровня поверхности воды вспомогательного насоса, который служит для заполнения входных и выходных частей водометов водой для того, чтобы запустить работу водометов перед их началом работы. В дальнейшем, после запуска водометов, двигатель поз.7 может быть отключен.
Работа ЛАВ по варианту, изображенному на Фиг.1, осуществляется следующим образом. Перед первым пуском ЛАВ с включением двигателя поз.7 производят заполнение входных и выходных частей поз.3, 4 водометов. Далее пилот включает двигатели поз.2. При этом начинается выброс струй воды через выходные сечения водометов, а двигатель поз.7 отключается. С помощью рулей поз.5 пилоты, управляя направлением векторов тяги водометов, обеспечивают вертикальный подъем ЛАВ. При достижении требуемой тяги водометов, ЛАВ отрывается нижней частью кабины поз.6 от поверхности воды и поднимается на высоту с минимальным контактом входной части поз.3 водометов, но при этом приемное отверстие остается под водой. Далее пилоты с помощью рулей поз.5 осуществляют управляемый полет ЛАВ вдоль водной поверхности.
На Фиг.2 изображен другой вариант ЛАВ, который состоит из одного водомета, в котором вода ускоряется с помощью устройства, описанного в патенте RU 2455525 С1 «Центробежное тяговое устройство», изобретатель: Гарафутдинов А.А., МПК: F03H 99/00; В63Н 11/08; В64С 29/04. Водомет имеет лопаточный рабочий орган поз.1, приводимый во вращательное движение двигателем ДВС поз.2, входную часть поз. 3 имеющую в подводной части обтекаемое поперечное сечение (сечение Б-Б) для уменьшения сопротивления воды при поступательном движении ЛАВ вдоль водной поверхности. Выходная часть поз.4 водомета образована множеством лопаточных каналов, расположенных по окружности, соосной оси вращения рабочего органа поз.1 водомета и вала двигателя поз.2. Причем эти лопаточные каналы в плоскости оси вращения рабочего органа поз.1 водомета изогнуты таким образом, что рабочее тело (вода) отбрасывается из выходной части водомета в сторону поверхности воды, т.е. вниз. При этом направление выброса струи воды имеет небольшой угол α отклонения от оси вращения рабочего органа поз.1 водомета, как изображено на Фиг.2. Такая особенность конструкции выходной части поз.4 водомета обеспечивает более высокое положение равнодействующей силы тяги водомета по отношению к центру тяжести ЛАВ, что обеспечивает устойчивость ЛАВ при отклонении его от вертикали. А именно: при отклонении ЛАВ в ту или иную сторону возникает момент равнодействующей силы тяги водомета относительно центра масс ЛАВ, стремящейся вернуть ЛАВ в исходное положение. Входная часть поз.3 и выходная часть поз.4 водомета не вращаются. У выходных сечений выходной части поз.4 водомета расположены четыре руля поз.5 (один расположен спереди, второй - сзади, третий - справа, четвертый - слева относительно рабочего места пилота), которые могут отклоняться по сигналам управления от пилота и создавать тем самым дополнительные силы управления. Имеется также кабина поз.6 с пилотским и грузовым отсеком и здесь отдельно выделен машинный отсек, в котором расположен двигатель поз.2 и топливный бак поз.9 и другие системы. Выше уровня водомета в нижней части кабины расположено воздушное торообразное кольцо поз.10, обеспечивающее плавучесть ЛАВ на поверхности воды в приводненном состоянии.
Работа ЛАВ по варианту, изображенному на Фиг.2, осуществляется таким образом. Первоначально ЛАВ покоится на поверхности воды в плавучем состоянии благодаря воздушному кольцу поз.10. Как видно из Фиг.2, все части водомета конструктивно находятся ниже воздушного кольца поз.10 и значит при неработающем двигателе поз.2 находятся первоначально ниже уровня поверхности воды. Далее пилот запускает двигатель поз.2 и соответственно начинает вращаться рабочий орган поз.1 водомета, который находится первоначально в притопленном положении. Водомет благодаря выбросу воды из выходных частей поз.4 водомета начинает создавать силу тяги. Затем пилоты, увеличивая обороты двигателя поз.2, увеличивают силу тяги водомета до величины, достаточной, чтобы поднять ЛАВ над поверхностью воды, и он отрывается от поверхности воды, поднимаясь на высоту с минимальным контактом входной части поз.3 водомета, при котором приемное отверстие остается под водой. Используя далее рули поз.5, пилот отклоняет ЛАВ от вертикального положения, увеличивая при этом силу тяги водомета, и ЛАВ начинает двигаться в нужном направлении, удерживаясь при этом над поверхностью воды основной своей частью с помощью системы стабилизации, работающей по следящему принципу.
На Фиг.1 и 2 ЛАВ показаны в надводном положении при работающих водометах.
Источники информации
1. Большая Советская Энциклопедия. (В 30 томах). Гл. ред. A.M. Прохоров. 3-е изд. М., «Советская Энциклопедия», 1971. Т.5. Вешин-Газли. 1971. 640 с.
2. Русецкий А.А., Жученко, М.М., Дубровин О.В. Р88. Судовые движители. Л., «Судостроение», 1971. 288 с.
Летательный аппарат с водометом относится к летательным аппаратам вертикального взлета и посадки для перемещения над поверхностью воды. Устройство содержит кабину для размещения в ней пилотов и грузов, систему стабилизации, один или большее количество водометов с одним или большим числом раздельных или объединенных между собой входных и выходных частей водометов, систему управления. При работе водометов имеется возможность удержания и перемещения над поверхностью воды летательного аппарата с водометом, у которого под поверхностью воды при этом остаются лишь участки входных частей водометов с приемными отверстиями водометов, расположенными на минимально достаточной глубине. При этом все части летательного аппарата с водометом объединены между собой. Достигается уменьшение габаритов летательного аппарата и возможность посадки на поверхность воды при любых погодных условиях. 2 ил.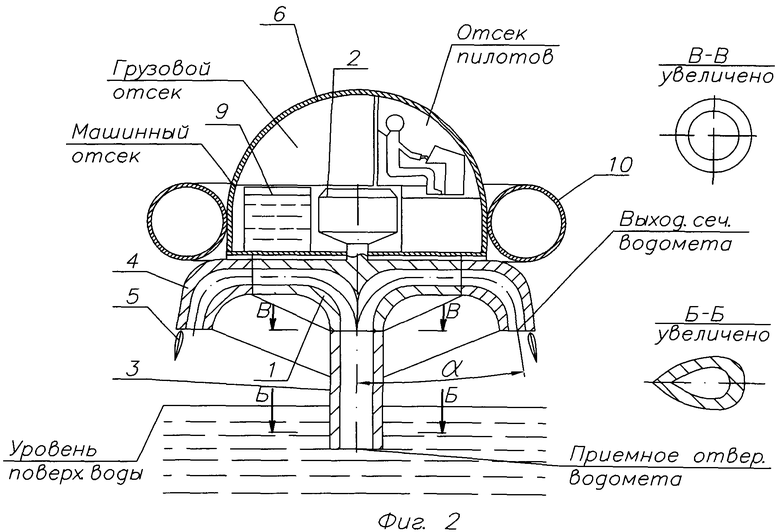
1. Летательный аппарат с водометом, содержащий один или большее число водометов с одним или большим числом раздельных или объединенных между собой входных и выходных частей водометов, систему управления, отличающийся тем, что при работе водометов имеется возможность удержания и перемещения над поверхностью воды летательного аппарата с водометом, у которого под поверхностью воды при этом остаются лишь участки входных частей водометов с приемными отверстиями водометов расположенными на минимально достаточной глубине; при этом в летательном аппарате с водометом имеется также кабина для размещения в ней пилотов и грузов, система стабилизации, а все части летательного аппарата с водометом объединены между собой.
| Центрифуга для разделения тонкой суспензии в жидкой среде | 1955 |
|
SU103093A1 |
| МОБИЛЬНОЕ ЗДАНИЕ СИСТЕМЫ JERRY И СПОСОБ ЕГО БЛОКИРОВАНИЯ С ТАКИМИ ЖЕ ЗДАНИЯМИ | 2002 |
|
RU2238376C2 |
| US 20100200702 A1, 12.08.2010 | |||
| Способ приготовления контактной массы из сидерита для процесса дезодорации отработанного воздуха, содержащего органические вещества, путем сжигания | 1957 |
|
SU118941A1 |

