Винтокрылый летательный аппарат с экранным эффектом относится к области летательных аппаратов вертикального взлета и посадки с несущим винтом для полета над опорной поверхностью.
Существуют экранопланы, представляющие собой летательные аппараты для полета в близи поверхности Земли и имеющие много общего с самолетами, но в отличие от последних для образования аэродинамических сил используют особые свойства аэродинамических сил в близи опорной поверхности или т.н. «эффект экрана»[1]. Опорной поверхностью или поверхностью Земли является водная или твердая поверхность Земли, вблизи которой и над которой происходит перемещение летательного аппарата (ЛА). Благодаря этому эффекту аэродинамическое качество экранопланов оказывается существенно выше, чем у обычных самолетов. Это позволяет увеличить массу полезного груза или уменьшить расход топлива. Таким образом, экономичность экранопланов выше, чем у обычных самолетов и соответственно вертолетов. Но экранопланы в процессе своего полета могут двигаться лишь благодаря своему движению в горизонтальной плоскости и имеют очень слабую маневренность. Если скорость горизонтального движения экраноплана снизится до значения минимально-необходимого, он начнет снижаться к опорной поверхности, т.е. у него нет возможности зависать на месте (над поверхностью Земли). Экранопланы могут изготавливаться в амфибийном исполнении, т.е. способными взлетать и садится как на водную, так и на твердую поверхность. Иногда экранопланы относят к транспортным средствам на динамичной воздушной подушке в отличие от транспортных средств на статической воздушной подушке (далее сокращенно их будем называть ТССВП), у которых воздушная подушка поддерживается благодаря нагнетанию воздуха с помощью вентиляторов.
Существуют также вертолеты и летающие платформы, которые могут зависать на месте (над Землей). Но они используют в качестве несущих винтов воздушные винты с обычными лопастями (т.е. с высоким удлинением), что ограничивает возможности к повышению экономичности таких ЛА. Для вертолетов это приводит к большому диаметру несущих винтов и как следствие к большим габаритам вертолетов.
Задачей предлагаемого изобретения является создание ЛА, обладающего свойствами ЛА вертикального взлета и посадки с возможностью зависания на месте (над поверхностью Земли) и двигаться со скоростью горизонтального полета близкой к скорости вертолета и при этом превосходящих их по экономическим показателям (увеличение полезной нагрузки и(или) уменьшения расхода топлива и т.д.), а также обладающие амфибийными свойствами и меньшими габаритами чем вертолеты.
Поставленная задача решается тем, что винтокрылый летательный аппарат с экранным эффектом (далее сокращенно ВЛАЭФ), содержащий не менее одного несущего винта, привод винта, отличается тем, что средняя ширина лопасти несущего винта по длине не меньше чем высота полета над опорной поверхностью в режиме горизонтального полета.
Под средней шириной лопасти будем понимать ширину лопасти взятой по середине размаха лопасти, по средней линии аэродинамического профиля и измеренная от начальной до задней кромки аэродинамического профиля на одном радиусе от оси несущего винта. Т.е. эта пространственная линия, располагающаяся на цилиндрической поверхности с осью совпадающей с осью несущего винта и радиусом совпадающим с серединой размаха лопасти с началом в начальной точке профиля и концом в конечной точке профиля, а промежуточные точки располагаются на средней линии профиля.
Под высотой полета над опорной поверхностью в режиме горизонтального полета понимается расстояние от поверхности Земли (грунта, поверхности водоема, реки, дороги и т.д.), над которой происходит полет предлагаемого устройства в горизонтальном направлении, до нижней части лопасти несущего винта или задней кромке лопасти несущего винта, т.е. до самой его нижней точке.
В предлагаемом устройстве для поддержания его над поверхностью Земли используется один или несколько несущих винтов как у вертолетов или аэродинамических платформ. Но в отличие от них несущий винт ВЛАЭФ имеет лопасти, средняя ширина которых превышает высоту полета устройства над опорной поверхностью. В этом случае лопасти «работают» в условиях действия «эффекта экрана» подобно крылу экраноплана. Что согласно источнику [1] дает существенный прирост в аэродинамическом качестве в сравнении с обычной лопастью вертолета. Это позволяет увеличить массу полезного груза или уменьшить расход топлива и требуемую мощность двигателя. Т.о., предлагаемое устройство, обладающее таким несущим винтом, имеет возможность двигаться с полным отрывом от поверхности Земли, подобно вертолетам или летающим платформами, а, следовательно, в отличие от наземного транспорта способно двигаться со скоростью, приближающейся к скорости вертолета, а также может взлетать, садиться и неподвижно зависать над любой поверхностью как твердой, так и водной (болотной и т.д.) и при этом не требует для себя специальной взлетной полосы или взлетного участка как экраноплан. Поскольку чем больше средняя ширина лопасти предлагаемого устройства, тем выше «эффект экрана», лопасти его несущего винта должны иметь минимальное удлинение. Из этого следует, что при равных несущих способностях габариты предлагаемого устройства будут меньше габаритов вертолета.
Предлагаемое устройство благодаря «эффекту экрана», обусловливающее повышение аэродинамического качества лопасти, на своем основном режиме полета над опорной поверхностью по экономичности превосходит известные вертолеты и летающие платформы с обычными винтами. Если же потребуется подняться на большую высоту потребуется большая мощность двигателя и свои преимущества в экономичности над вертолетами оно потеряет. Т.е., если есть такая необходимость сочетать в себе свойства, как предлагаемого устройства, так и вертолета можно заложить в силовую установку достаточный запас по мощности или же помимо несущих винтов как у предлагаемого устройства использовать дополнительно несущие винты как у обычных вертолетов.
Предлагаемое устройство по своим амфибийным свойствам близко к ТССВП, но в отличие от них оно может отрываться от опорной поверхности значительно выше, чем ТССВП и тем самым у ВЛАЭФ полностью отсутствует опасность как у ТССВП «зацепиться» за какую-либо неровность опорной поверхности или растительность. Благодаря этому в отличие от ТССВП скорость предлагаемого устройства может быть значительно выше и достичь значений близких к скорости вертолета.
Ввиду того, что лопасти несущего винта предлагаемого устройства имеют большую среднюю ширину, то эти лопасти будут иметь большую жесткость, чем у обычных винтов и значит меньшую шумность и вибрацию.
Для обеспечения горизонтального полета у предлагаемого устройства может быть установлен на несущем винте автомат перекоса подобный тому, который устанавливается на несущий винт вертолета для создания горизонтальной тяги, а также могут устанавливаться дополнительные обычные воздушные винты как у ТССВП. Если лопастей в несущем винте мало, то горизонтальная тяга может создаваться не благодаря отклонению лопастей как в автомате перекоса вертолета, а благодаря отклонению положения оси несущего винта относительно вертикали. Это может быть обеспечено отклонением центра масс предлагаемого устройства от оси несущего винта с помощью гидравлического, пневматического, механического привода или с помощью воздушных винтов или рулей.
При осуществлении горизонтального полета ввиду того, что часть лопастей, вращаясь, двигаются навстречу набегающему потоку воздуха, а другая часть - попутно потоку, на эти части действуют разные по величине аэродинамические силы. Вследствие этого ось несущего винта будет наклоняться от вертикали в плоскости перпендикулярной направлению движения ВЛАЭФ. Такое же явление характерно и для вертолетов. В предлагаемом устройстве может быть использовано для выравнивания кабины от крена автомат перекоса как у вертолетов или систему управления стабилизации положения кабины. Такая система может содержать в себе датчики, которые следят за угловым положением кабины относительно вертикальной оси и подавать соответствующие команды на привод, связывающий кабину предлагаемого устройства с несущим винтом. Эта система управления может быть совмещена с упомянутой в предыдущем абзаце приводом для создания горизонтальной тяги. Кроме того, для устранения перекоса несущего винта от набегающего потока можно ограничить поступление этого потока таким образом, чтобы он подавался только со стороны, где лопасти движутся при вращении навстречу движению ВЛАЭФ, а набегающий поток будет двигаться по кольцевому каналу над несущим винтом против направления вращения несущего винта.
Для повышения продольной и поперечной устойчивости ВЛАЭФ лопасти несущего винта могут иметь положительную V-образность (п. 2 формулы изобретения), а для уменьшения - отрицательную V-образность. Здесь под положительной V-образностью лопасти, как и под положительной V-образностью крыла, понимается отклонение лопасти вверх относительно оси и в плоскости оси вращения несущего винта и, наоборот - при отрицательной V-образности.
Чем больше средняя ширина лопасти несущего винта, тем выше «эффект экрана», поэтому эти лопасти должны иметь максимально-возможную среднюю ширину и минимальное удлинение. Наибольшую среднюю ширину может иметь несущий винт, выполненный из одной лопасти, «скрученной» в один виток винтовой поверхности, т.е. лопасть, у которой средние линии профилей лежат на одном витке винтовой поверхности (п. 3 формулы изобретения). Причем вдоль средней линии, взятой на одном радиусе относительно оси несущего винта от передней точки до конечной профиль лопасти по толщине изменяется как аэродинамический профиль лопасти или крыла.
Если в предлагаемом устройстве один несущий винт, то для компенсации его реактивного момента как у одновинтовых вертолетов может быть применен рулевой винт. Если предлагаемое устройство имеет более одного несущего винта, то их реактивные моменты могут быть взаимно компенсированы как у современных двухвинтовых вертолетов или летающих платформ.
Система управления предлагаемого устройства может быть подобна системе управления современных вертолетов.
Поскольку у предлагаемого устройства несущий винт находится снизу, т.е. близко к Земле, а соответственно кабина находится сверху над несущим винтом, его несущий винт должен быть огражден сверху и по бокам от попадания или затягивания в него человека, животных, растений и т.д. Такое ограждение может быть выполнено из отдельных элементов в виде сетчатого или ячеистого каркаса. Снизу к этому каркасу могут быть прикреплены специальные элементы, на которые предлагаемое устройство может опираться при посадке на опорную поверхность, например: колеса, лыжи, поплавки т.д. Также ограждение может быть и сплошным.
Для управления предлагаемым устройством могут использоваться различные воздушные рули как у самолетов и судов на воздушной подушке или другие известные устройства управления, а также, в частности, для разворота корпуса предлагаемого устройства относительно оси несущего винта может применяться рулевой винт (при наличии).
Для уменьшения стекания воздуха на концах лопастей или лопасти они на концах могут иметь отдельные концевые шайбы как у крыльев самолетов или эти концевые шайбы могут быть объединены в одно непрерывное кольцо. Для уменьшения перетекания воздушного потока может быть установленная круговая обечайка со стороны не вращающегося корпуса с небольшим зазором вокруг торцов лопастей.
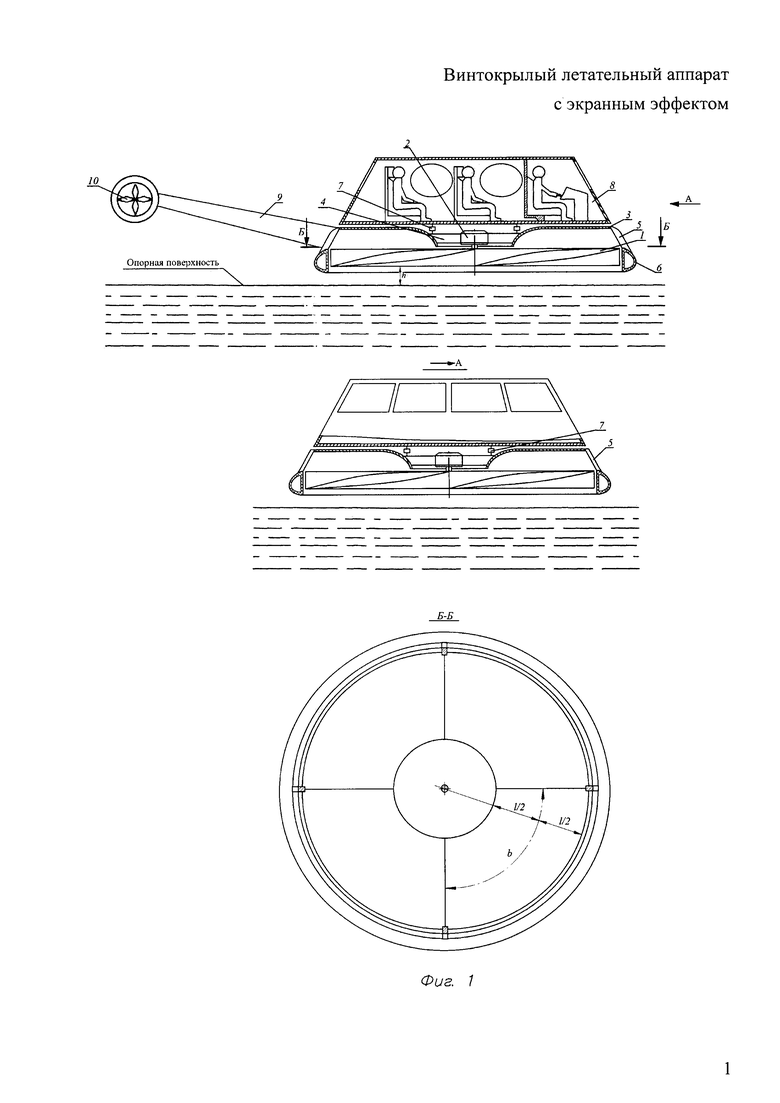
На фиг. 1 изображено предлагаемое устройство с одним несущим 4-ех лопастным винтом, в котором горизонтальная тяга создается благодаря смещению центра масс устройства относительно оси несущего винта.
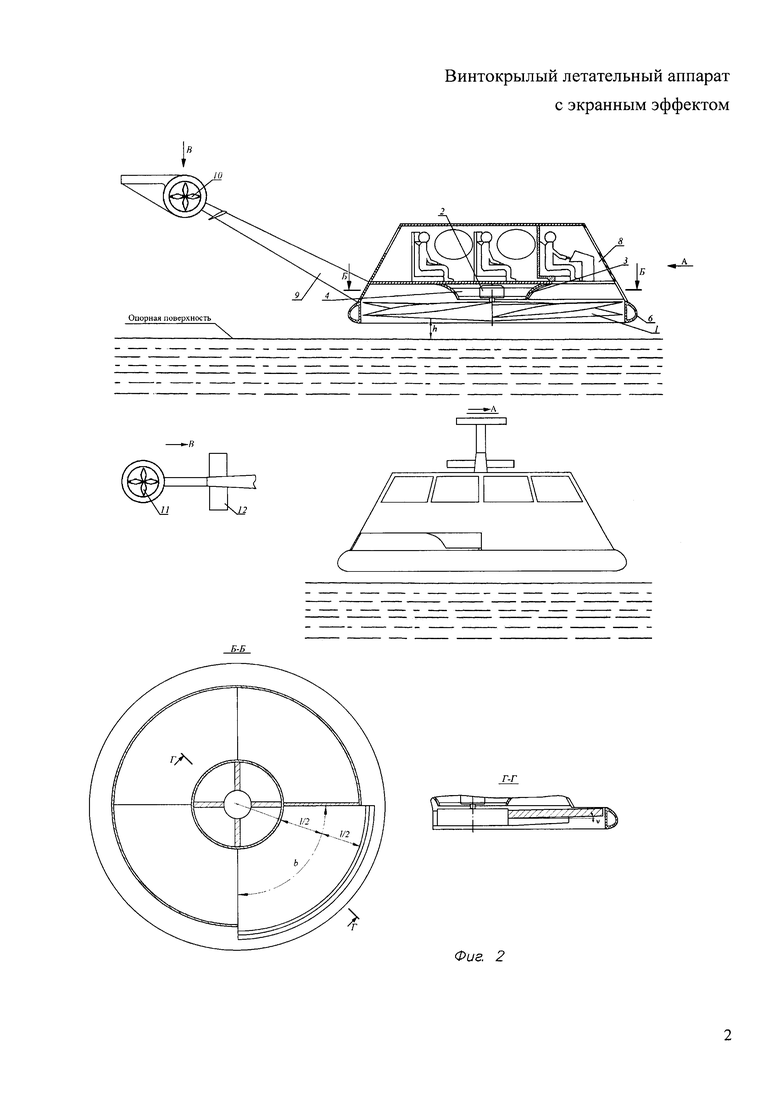
На фиг. 2 изображено предлагаемое устройство с одним несущим 4-ех лопастным несущим винтом, у которого лопасти имеют положительную V-образность (п. 2 формулы изобретения).
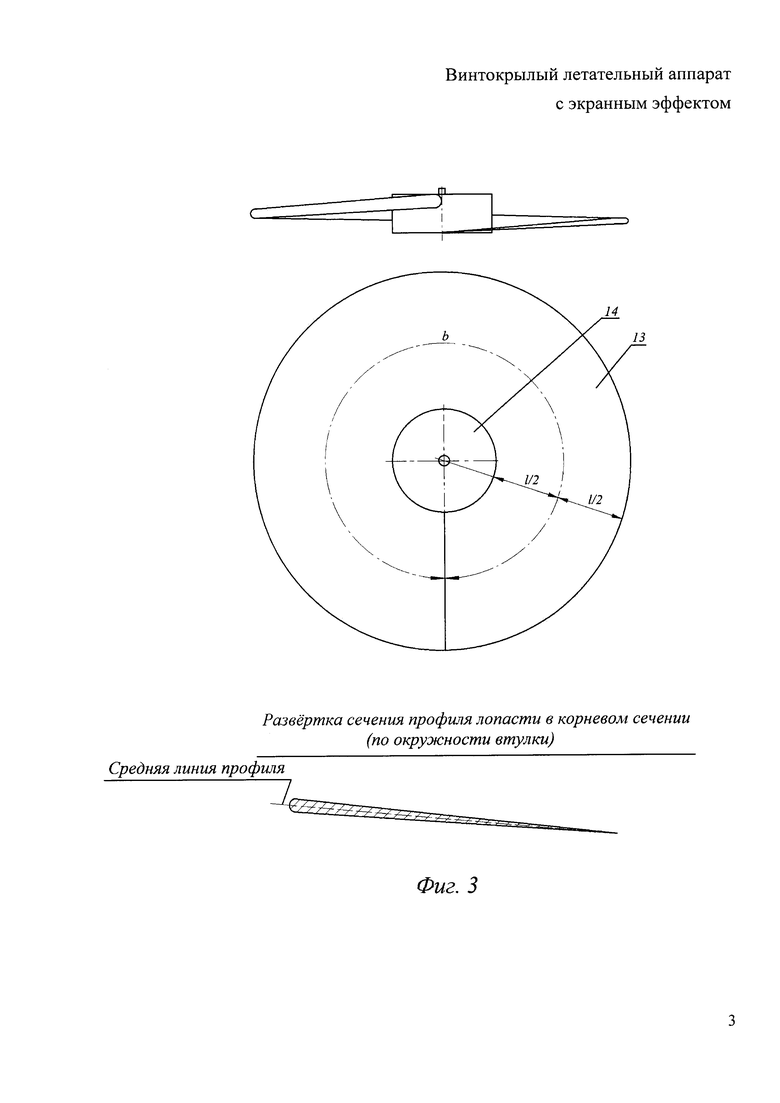
На фиг. 3 показан однолопастной несущий винт, у которого средняя линия всех профилей лопасти лежат на одном витке винтовой поверхности относительно оси несущего винта (п. 3 формулы изобретения).
Предлагаемое устройство, изображенное на фиг. 1 содержит один 4-ех лопастной несущий винт поз. 1. При этом задняя кромка предыдущей лопасти имеет ту же проекцию на плоскость перпендикулярную оси несущего винта, что и передняя кромка последующей лопасти и направлены по радиусу от оси несущего винта поз. 1. Несущий винт поз. 1 приводится во вращение с помощью двигателя поз. 2, который установлен в корпусе поз. 3 через фундаментные кронштейны поз. 4. Корпус поз. 3 соединяется с помощью четырех кронштейнов поз. 5 с торообразным поплавком поз. 6, являющимся взлетно-посадочным устройством. В сечении Б-Б показан вид сверху на несущий винт поз. 1 и показана средняя ширина лопасти Ъ. На основном виде и на виде А показаны гидроцилиндры поз. 7 в количестве 4 штук, которые по команде от системы управления могут отклонять кабину поз. 8 относительно корпуса поз. 3 в любую сторону, что обеспечивает смещение центра масс кабины поз. 8 относительно оси несущего винта поз. 1. С задней стороны к корпусу поз. 3 крепится хвостовая балка поз. 9 на конце, которого установлен рулевой винт поз. 10. Привод рулевого винта поз. 10 может быть как от собственного двигателя, так и от двигателя поз. 2 через редуктор отбора мощности, подобно тому, как это происходит в вертолетах с одним несущим винтом.
Предлагаемое устройство, изображенное на фиг. 1 работает следующим образом. Первоначально ВЛАЭФ покоится на поверхности водоема благодаря торообразному поплавку поз. 6. Для взлета включается двигатель поз. 2, который раскручивает несущий винт поз. 1. При достижении оборотов несущего винта поз. 1 достаточных для взлета, ВЛАЭФ поднимается над опорной поверхностью на высоту h, не превышающей средней ширины лопасти b, т.е. h<b. Рулевой винт поз. 10 создает момент силы, компенсирующий момент от двигателя поз. 2. Воздух к несущему винту поз. 1 поступает через воздушный просвет между корпусом поз. 3 и торообразным поплавком поз. 6. Для создания горизонтальной тяги пилот отклоняет рычаг управления в требуемое положение, что преобразуется системой управления в соответствующие перемещения гидроцилиндров поз. 7, отклоняющие центра масс кабины поз. 8 относительно оси несущего винта поз. 1. Это приводит к наклону оси несущего винта от вертикали. В результате возникает горизонтальная проекция от векторной суммы силы тяжести устройства и подъемной силы несущего винта поз. 1, направленной вдоль оси несущего винта поз. 1. В процессе горизонтального полета, ввиду того, что на одной стороне лопасти несущего винта поз. 1 движутся навстречу набегающему воздушному потоку, а на другой половине - в том же направлении, что и набегающий воздушный поток, на эти половины действуют разные по величине силы. Такое явление характерно также и для вертолетов. Чтобы скомпенсировать такую разность сил автоматически по команде системы управления гидроцилиндры поз. 7 наклоняют несущий винт поз. 1 таким образом, чтобы уменьшить подъемную силу на одной стороне, и увеличить подъемную силу на другой половине несущего винта поз. 1, т.е. уровнять силы на обеих сторонах несущего винта поз. 1. Посадка предлагаемого устройства осуществляется в порядке обратном взлету и полету.
Предлагаемое устройство, изображенное на фиг. 2, содержит один 4-ех лопастной несущий винт поз. 1 точно такой же, как и в предыдущем варианте, изображенном на фиг. 1, но отличается от него тем, что его лопасти имеют положительную V-образность (п. 2 формулы изобретения) и угол этот составляет ψ (см. вид В-В). Несущий винт поз. 1 приводится во вращение с помощью двигателя поз. 2, который установлен в корпусе поз. 3 через фундаментные кронштейны поз. 4. Корпус поз. 3 соединяется с кабиной поз. 8 в единую монолитную конструкцию. К корпусу поз. 3 закреплен также неподвижно торообразный поплавок поз. 6. В сечении Б-Б показан вид сверху на несущий винт поз. 1 и показана средняя ширина лопасти b. При этом воздух на несущие винт поз. 1 входит через открытый нижний правый сектор (см. вид. Б-Б). С тыловой стороны к корпусу поз. 3 крепится хвостовая балка поз. 9 на конце, которой установлен рулевой винт поз. 10 и воздушный винт поз. 11, ось которого параллельна оси несущего винта поз. 1. Приводы рулевого винта поз. 10 и винта поз. 11 могут быть как от собственных двигателей, так и от двигателя поз. 2. На хвостовой балке поз. 9 имеются также воздушные рули поз. 12. Винт поз. 11 и воздушные рули поз. 12 используются для управления по тангажу.
Устройство на фиг. 2 работает следующим образом. После включения двигателя поз. 2, раскручивается несущий винт поз. 1 и ВЛАЭФ поднимается над опорной поверхностью на высоту h, не превышающую средней ширины лопасти b, т.е. h<b. Рулевой винт поз. 10 создает момент силы, компенсирующий момент от двигателя поз. 2. Воздух к несущему винту поз. 1 поступает через воздушный просвет между кабиной поз. 8 и торообразным поплавком поз. 6 через открытый нижний правый сектор (см. вид. Б-Б). Несущий винт поз. 1 вращается против часовой стрелки. Направление вращения или кругового движения рассматривается, если смотреть сверху вниз, т.е. в сечение Б-Б. При движении ВЛАЭФ вперед, набегающий воздушный поток, входящий через открытый нижний правый сектор, движется по круговому каналу по часовой стрелке, т.е. навстречу вращающимся лопастям. Такая конструкция предлагаемого устройства обеспечивает практически одинаковые усилия на всех лопастях несущего винта поз. 1 в режиме горизонтального полета. Для создания горизонтальной тяги, на начальном этапе, пилот отклоняет рычаг управления в требуемое положение, что обеспечивает включение винта поз. 11, который наклоняет ВЛАЭФ вперед и тем самым происходит наклон оси несущего винта поз. 1. Вследствие этого возникает горизонтальная составляющая тяги несущего винта поз. 1, что обеспечивает горизонтальный полет.При достижении скорости горизонтального полета достаточной величины система управления для управления по тангажу начинает использовать вместо винта поз. 11 воздушные рули поз. 12, т.к. они более эффективны (в экономическом плане) нежели воздушный винт поз. 11. Посадка предлагаемого устройства осуществляется в порядке обратном взлету и полету.
На фиг. 3 показан однолопастной несущий винт состоящий из одной винтовой лопасти поз. 13, у которого средняя линия всех профилей лопасти лежат на одном витке винтовой поверхности относительно оси несущего винта и цилиндрической втулки поз. 14 (п. 3 формулы изобретения). Винт во время работы предлагаемого устройства вращается против часовой стрелки.
1. Экраноплан / Н. И. Белавин // Чаган - Экс-ле-Бен. - М.: Советская энциклопедия, 1978. - (Большая советская энциклопедия: [в 30 т.] / гл. ред. А.М. Прохоров; 1969-1978, т. 29).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКРАНОПЛАН С ВОДОМЁТНЫМ ДВИЖИТЕЛЕМ | 2015 |
|
RU2582505C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВОДОМЁТОМ | 2013 |
|
RU2534094C1 |
| ЦЕНТРОБЕЖНЫЙ ДВИЖИТЕЛЬ | 2012 |
|
RU2500922C2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ПЫЛЕОБРАЗНОГО РАБОЧЕГО ТЕЛА В ЭЛЕКТРОРАКЕТНЫЙ ДВИГАТЕЛЬ | 2012 |
|
RU2508473C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| ЦЕНТРОБЕЖНОЕ ТЯГОВОЕ УСТРОЙСТВО | 2011 |
|
RU2455525C1 |
| Устройство запуска ракет с лазерным ракетным двигателем | 2016 |
|
RU2618558C1 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С РАКЕТНЫМ ДВИГАТЕЛЕМ | 2019 |
|
RU2715507C1 |
| ЛАЗЕРНЫЙ РАКЕТНЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРОСТАТИЧЕСКИМ УСКОРЕНИЕМ РАБОЧЕГО ТЕЛА | 2017 |
|
RU2643883C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ | 2014 |
|
RU2563921C1 |
Изобретение относится к области летательных аппаратов, использующих для полета экранный эффект вблизи опорной поверхности. Винтокрылый летательный аппарат с экранным эффектом (ВЛАЭФ) содержит не менее одного несущего винта, привод винта. Средняя ширина лопасти несущего винта по длине не меньше чем высота полета над опорной поверхностью в режиме горизонтального полета. Лопасти несущего винта выполнены с положительной V- образностью. Обеспечивается скорость полета, близкая к скорости вертолета, при снижении расхода топлива, увеличении грузоподъемности. 2 з.п. ф-лы, 3 ил.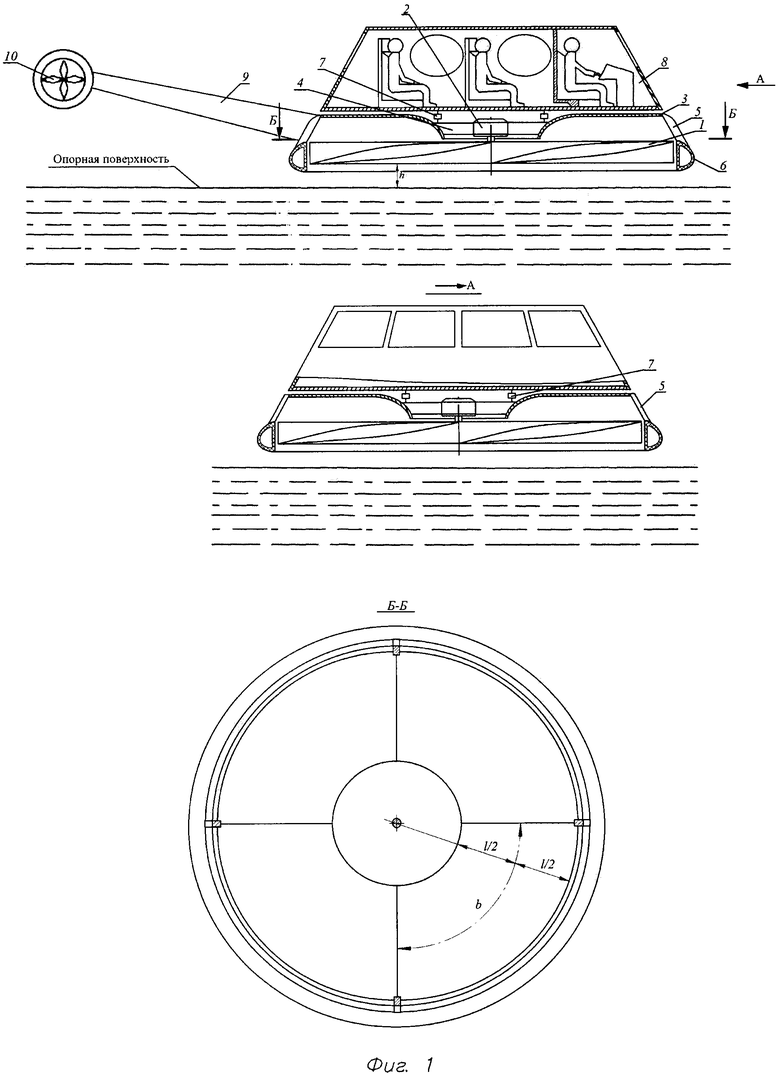
1. Винтокрылый летательный аппарат с экранным эффектом, содержащий не менее одного несущего винта, привод винта, отличающийся тем, что средняя ширина лопасти несущего винта по длине не меньше чем высота полета над опорной поверхностью в режиме горизонтального полета.
2. Винтокрылый летательный аппарат по п. 1, отличающийся тем, что лопасти несущего винта имеют положительную V-образность.
3. Винтокрылый летательный аппарат по п. 1, отличающийся тем, что как минимум один несущий винт, выполнен из одной лопасти, у которой средние линии профилей лежат на одном витке винтовой поверхности.
| НИЗКОЛЕТАТЕЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ АППАРАТ И ТУРБОРЕАКТИВНЫЙ ДВИГАТЕЛЬ С ДВУМЯ ПРОТОЧНЫМИ КАНАЛАМИ | 2013 |
|
RU2586996C2 |
| Распределитель гильз в мундштучных папиросных машинах | 1931 |
|
SU26605A1 |
| WO 1988000898 A1, 11.02.1988 | |||
| US 5318248 A1, 07.06.1994 | |||
| СИЛОВАЯ УСТАНОВКА ДЛЯ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1993 |
|
RU2071441C1 |

