Изобретение относится к области ракетно-космической техники для запуска полезных грузов на околоземную орбиту.
В настоящее время во всем мире применяются ракеты с применением ракетных двигателей на химическом топливе (жидкостные - ЖРД и ракетные двигатели твердого топлива - РДТТ). Основным недостатком таких ракетных двигателей является невысокая скорость истечения рабочего тела (около 3÷4 км/с), что приводит к тому, что вес полезной нагрузки составляет порядка 3÷4% от стартового веса ракеты и соответственно приводит к высокой стоимости затрат на доставку грузов на околоземную орбиту. Кроме того, наличие на ракете огромного количества топлива и окислителя создает огромную опасность ее взрыва и разрушения.
Известны лазерные ракетные двигатели (ЛРД), тяга в которых создается благодаря направленному на него лазерному излучению, источник которого может быть размещен вне ракеты, например, на земле или в воздухе. На самой ракете находится рабочее тело в твердом или жидком состоянии, которое благодаря лазерному облучению с большой скоростью отбрасывается от ракеты, создавая силу тяги ЛРД. Скорость истечения рабочего тела из ЛРД при этом может достигать величины более 10 км/с. Вследствие этого применение ЛРД может существенно увеличить долю полезной нагрузки ракеты, которая может составить при этом значения порядка 10÷15% от стартового веса ракеты, и соответственно значительно сократить затраты на доставку грузов на околоземную орбиту. Поскольку в ракете с ЛРД отсутствуют топливо и окислитель, то и опасность взрыва также отсутствует. Но использовать ЛРД для старта с поверхности земли не рационально, т.к. источники лазерного излучения очень тяжелы и поэтому располагать их на самой ракете невыгодно. Размещение их на поверхности земли ввиду сильного поглощения воздухом лазерного излучения в нижних слоях атмосферы приведет к большим потерям и даже к полному поглощению энергии луча на дистанции разгона ракеты.
Задачей изобретения является уменьшение стоимости затрат на доставку грузов на околоземную орбиту и уменьшение опасности взрыва космической ракеты с помощью использования лазерного ракетного двигателя. Поставленная задача решается тем, что в устройстве запуска ракет с лазерным ракетным двигателем, содержащем источники лазерного излучения, не менее одного пучка оптических волноводов, платформу, на которой расположено поворотное зеркало с механизмом управления, воздушные шары, не менее одной растяжки, согласно изобретению платформа, на которой расположено поворотное зеркало с механизмом управления, подвешена к одному или большему числу воздушных шаров и прикреплена к земной поверхности с помощью не менее одной растяжки, по одному или нескольким из которых проложены не менее одного пучка оптических волноводов, нижние концы которых имеют возможность получать лазерное излучение от расположенных на земной поверхности источников лазерного излучения, а верхние концы имеют возможность передавать лазерное излучение с малым расхождением на поворотное зеркало с механизмом управления, которое может направлять поток лазерного излучения в зону облучения лазерного ракетного двигателя.
В предложенном устройстве на поверхности земли имеются многочисленные источники лазерного излучения (далее коротко будем называть - ИЛИ) вместе с их системами накачки, охлаждения, управления и т.д. В устройстве запуска ракет с лазерным ракетным двигателем (далее коротко будем называть - УЗРЛРД) под термином поверхность земли имеется в виду не только земля как твердая поверхность нашей планеты, но и водная ее часть. При этом ИЛИ могут находиться в здании, в подземных сооружениях, а также на каком-либо плавательном средстве (например, судовая платформа, корабль, баржа и т.д.). При этом тепло от системы охлаждения ИЛИ может быть использовано вторично. Например, для выработки электроэнергии или повторно в лазерных установках. Источниками лазерного излучения могут быть всевозможные типы лазеров, отличающиеся длиной волны излучения, способом накачки лазера т.д. Согласно источнику [1] в нижних слоях атмосферы значительная часть энергии лазерного излучения поглощается относительно на малом расстоянии, но чем выше над поверхностью земли распространяется лазерный луч, тем интенсивность поглощения энергии лазерного излучения воздухом становится меньше. Объясняется это тем, что в нижнем наиболее плотном слое атмосферы, называемом тропосферой, согласно источнику [2], сосредоточен почти весь водяной пар атмосферы, в нем образуются облака, образуются восходящие и нисходящие токи воздуха и различные атмосферные явления, влияющие на погоду. А водяной пар и его производные (облака, туман) очень сильно поглощают лазерное излучение помимо поглощения лазерного излучения молекулами воздуха. Тропосфера по источнику [2] простирается на высоту около 11 км в умеренных широтах и 14-17 км в тропических широтах. В верхних слоях тропосферы и в нижней стратосфере наблюдаются струйные течения, которые характеризуются относительно малыми поперечными размерами и большими вертикальными и горизонтальными градиентами ветра. Струйные течения создают значительную турбулентность и негативно влияют на лазерное излучение. Таким образом, с высоты порядка 12 км и выше в умеренных широтах над уровнем моря доля потерь лазерного излучения значительно уменьшается. Следовательно, использование ЛРД становится экономически выгодным и целесообразным с высоты порядка 12 км и выше. Для «доставки» лазерного излучения с наземных лазеров служат не менее одного пучка оптических волноводов, прикрепленных и проложенных вдоль одной или нескольких растяжек от земли до платформы, на которой расположено поворотное зеркало с механизмом управления. Оптические волноводы могут быть выполнены в виде полых (трубчатых) стержней, заполненных инертным газом с малыми потерями, а изнутри покрытых отражающими металлическими поверхностями. Но в настоящее время значительное распространение получили оптические волноводы, изготовленные из очень тонких диэлектрических стержней и называемые оптическими волокнами или оптоволокнами. В настоящее время существует достаточно развитая технология производства оптических волноводов: одномодовых, многомодовых, градиентных и т.д., которые могут передавать лазерный луч на сотни километров при относительно малых потерях. Поскольку мощность необходимого лазерного излучения для ускорения космических ракет до первой космической скорости значительна и может составлять от 10 МВт до десятков ГВт, необходимо иметь очень много лазеров и множество волноводов - не менее одного пучка волноводов, по которым передаются лучи этих лазеров. Каждый пучок состоит из большого числа отдельных волноводов собранных вместе любым из известных способов: связкой, склейкой, под общей оболочкой и т.д. В соответствии со сказанным выше и т.к. выходные концы оптических волноводов располагаются на платформе, на которой расположено поворотное зеркало с механизмом управления (далее сокращенно будем называть - платформа) или рядом с ней, то для работы предлагаемого устройства необходимо, чтобы платформа находилась на высоте порядка 12 км над уровнем моря и выше. Высотное строительное сооружение такой высоты построить на основе современных строительных технологий практически невозможно. Проблема заключается в том, что здание такой высоты будет иметь давление в своем основании большее того значения, которое могут выдержать современные строительные материалы. В предлагаемом устройстве платформа поднимается на необходимую высоту с помощью одного или нескольких воздушных шаров, а удерживается от смещения своего положения с помощью одного или большего числа растяжек. Растяжка внизу закрепляется к неподвижному (мертво заложенному на поверхности земли) фундаменту или якорится (закрепляется) к неподвижным объектам, расположенным на земле или поверхности воды. Под растяжкой понимается канат, который может быть изготовлен из различных материалов (металлических сплавов: стальных, титановых и др., а также из неметаллических материалов: искусственных или природных волокон). Ввиду того, что длина растяжек значительная, то для уменьшения напряжений в канатах от их собственного веса к ним в определенных местах или на отдельных участках могут быть присоединены воздушные шары. В предлагаемом устройстве под воздушными шарами понимается легкая оболочка, заполненная легким газом, например гелием, водородом или другим газом легче воздуха. Как вариант, для поддержания платформы можно использовать конструкцию устройства, описанную в патенте US 9085897 (В2) «Space Elevator»; МПК B64G 1/10; В66В 11/00; В66В 11/04; В66В 9/00; Е04В 1/34; Е04Н 12/00; Е04Н 12/34; изобретатель: QUINE BRENDAN MARK, опубл. 21.07.2015. В УЗРЛРД от лазеров, расположенных на поверхности земли к платформе вдоль одного или нескольких растяжек, проложены один или несколько пучков оптических волноводов, общее количество которых не меньше количества, достаточного для пропускания лазерного излучения от всех лазеров. Нижние концы пучков оптических волноводов имеют возможность получать лазерное излучение от наземных ИЛИ. Это значит, что соединение отдельных оптических волноводов (собираемых далее в пучки) с лазерами производится таким образом, чтобы обеспечить прием лучей от лазеров с минимальными потерями. Выполнено это может быть различными известными способами. Например, пайкой, механическим способом и т.д. В случае применения в предлагаемом устройстве оптоволоконных лазеров их оптоволоконную часть можно выполнить длиной от земли до платформы. В этом случае лазеры и отдельные оптические волноводы были бы единым целым. Верхние концы пучков оптических волноводов имеют возможность передавать лазерное излучение с малым расхождением на поворотное зеркало. Это значит, что на платформе все оптические волноводы всех пучков оптических волноводов собираются вместе таким образом, чтобы обеспечить выход лучей из всех оптических волноводов максимально параллельно друг другу, т.е. с минимальным расхождением между собой и далее направить их на поворотное зеркало. Практически это может быть реализовано различными известными способами. Например, можно собрать все выходные концы оптических волноводов в жесткую конструкцию строго параллельно друг другу с помощью клея. Или можно изготовить отдельную конструкцию оптических волноводов строго параллельно уложенных и жестко связанных между собой с помощью клея или механическим каркасом. С одной из его сторон будут стыковаться отдельно волноводы, приходящие от лазеров и волноводы самой конструкции. В дальнейшем будем называть данную часть предлагаемого устройства собирателем лучей, т.к. ее назначением является собрать лучи, пришедшие по отдельным волноводам, в один мощный поток параллельно направленных лучей. В предлагаемом устройстве под поворотным зеркалом с механизмом управления понимается зеркало, которое может поворачиваться с помощью механизма слежения лазерной системы (МСЛС). Поворотное зеркало с механизмом управления может направлять поток лазерного излучения в зону облучения лазерного ракетного двигателя. Это значит, что МСЛС обеспечивает попадание выходного потока лазерного излучения в ту зону ЛРД - зону облучения ЛРД, которую необходимо облучать для эффективного разогрева рабочего тела ЛРД. В различных типах ЛРД зоной облучения могут быть такие его части как поверхность рабочего тела, зеркало, прозрачная стенка и т.д. При этом МСЛС, управляя поворотным зеркалом, обеспечивает автоматическое сопровождение попадания исходящего лазерного излучения в зону облучения ЛРД. Данный МСЛС имеет несколько приводов, которые получают команды для смещения поворотного зеркала в нужное направление в нескольких плоскостях либо от автономного (расположенного на платформе рядом с приводом) компьютера, либо от наземного компьютера, работающего в режиме реального времени, т.е. обрабатывающий сигналы, поступающие с ракеты с ЛРД от одного или большего числа маячков или сигналы со спутников (например, системы ГЛОНАС, GPS), контролирующих положение ракеты с ЛРД, либо данные, получаемые по радиоканалу с самой ракеты с ЛРД, о ее линейных и угловых координатах. Сигналы от маячков поступают на датчики, расположенные на платформе. Все сигналы, поступающие на платформу о положении ракеты с ЛРД вместе с сигналами от других датчиков (например, датчик направления и скорости ветра), обрабатываются компьютером по программе и преобразуются в сигналы для приводов зеркала. Маячком может быть отдельный лазер, расположенный на ракете с ЛРД, который с помощью бортового компьютера ракеты постоянно направляется на датчик, установленный на платформе УЗРЛРД. Благодаря этому датчику компьютер на платформе в режиме реального времени определяет то направление, в котором находится ракета относительно платформы. В другом варианте маячок может быть выполнен в виде какого-либо другого электромагнитного источника сигнала, например радиомаяк, сигнал от которого улавливается датчиками на платформе. Либо маячок может быть выполнен с помощью системы подсветки с находящегося на платформе лазера подобно тому, как это реализовано на современных системах подсветки военных целей в авиации. Для обеспечения высокой точности и надежности наведения исходящего от поворотного зеркала потока лазерного излучения на зону облучения ЛРД могут применяться не один, а несколько маячков (различных типов), а также сигналы со спутников и сигналы о координатах с самой ракеты с ЛРД и другие сигналы. МСЛС обеспечивает при этом поворот зеркала и исходящего от поворотного зеркала потока лазерного излучения в вертикальной и горизонтальной плоскостях. Таким образом, осуществляется работа МСЛС.
Для повышения интенсивности облучения зоны облучения может быть использован фокусирующий элемент - линза с управляемым фокусным расстоянием (п. 2 формулы изобретения). Поскольку расстояние между поворотным зеркалом и зоной облучения ЛРД постоянно изменяется, то линза должна иметь один или несколько исполнительных механизмов, обеспечивающих ей изменение ее фокусного расстояния, т.е. кривизну ее выпуклых поверхностей. При этом компьютер предлагаемого устройства, получая данные о расстоянии до зоны облучения, дает команду исполнительным механизмам на изменение фокусного расстояния линзы. Здесь могут применяться различные способы для измерения расстояния до ракеты с ЛРД. Например, лазерный дальномер и(или) радиодальномер, которые могут находиться либо на платформе предлагаемого устройства, либо на ракете с ЛРД. В случае, когда лазерный дальномер находится на платформе, луч лазера должен быть постоянно направлен на какую-либо точку ракеты по командам от компьютера УЗРЛРД. Механизм слежения лазерного дальномера в этом случае аналогичен МСЛС и может быть встроен в него. В случае, когда лазерный дальномер находится на ракете с ЛРД, луч лазера должен быть постоянно направлен на какую-либо точку на платформе по командам от бортового компьютера ракеты с ЛРД. Если дальномер находится на платформе, то данные о расстоянии между ракетой и платформой передаются непосредственно на компьютер УЗРЛРД. Если же дальномер находится на ракете с ЛРД, то данные с него передаются по радиоканалу на компьютер платформы. Наряду с вышеуказанными может быть применен и такой способ. Бортовой компьютер ракеты с ЛРД может в режиме реального времени транслировать на компьютер платформы по радиоканалу свои координаты, а компьютер платформы, сравнивая координаты ракеты с ЛРД с собственными координатами, будет рассчитывать необходимое расстояние. Ввиду того, что поток лазерного излучения, отразившись от поворотного зеркала, постоянно меняет свое направление относительно платформы, линза может иметь дополнительные механизмы, позволяющие ей находится перпендикулярно этому потоку и чтобы центр этого потока проходил через центр линзы. То есть данные механизмы по командам от компьютера, который отслеживает с помощью датчиков поворот поворотного зеркала в разных плоскостях, согласуют положение линзы и направление лазерного излучения. Механизмы, обеспечивающие изменение фокусного расстояния линзы, и механизмы, корректирующие положение линзы относительно платформы, могут управляться отдельным или тем же компьютером УЗРЛРД, который управляет МСЛС. В предлагаемом устройстве могут быть не одна, а большее число линз, но обязательно у этой системы линз имеется возможность изменять фокусное расстояние для управления проходящим через него лазерным потоком излучения.
Уменьшение интенсивности лазерного излучения происходит не только из-за поглощения и рассеивания в атмосфере, но и из-за некомпенсированной турбулентности воздуха. Как указано в источнике [1] турбулентность воздуха приводит к местным изменениям коэффициента преломления вдоль пути лазерного излучения. Ввиду того, что турбулентность меняется с течением времени, то ее влияние сравнимо с установкой деформированной линзы с изменяющимися оптическими свойствами. Поэтому согласно [1] для уменьшения влияния эффекта турбулентности необходимо использовать адаптивный корректирующий элемент, т.е. адаптивную оптику (п. 3 формулы изобретения). Принцип работы ее заключается в следующем. Часть ракеты освещается так называемым сигнальным лазером - маячком, либо этот лазер (маячок) располагается на самой ракете. В первом случае луч, отражаясь от ракеты, возвращается обратно и попадает на датчик, либо во втором случае от лазера расположенного на ракете непосредственно направлен на датчик, расположенный на платформе. В том и другом случае датчик, улавливающий луч от маячка, располагается на платформе у поворотного зеркала. Сигнал от датчика попадает в компьютерную систему, который в свою очередь рассчитывает необходимые изменения в оптической системе в режиме реального времени. Команды от компьютерной системы поступают на несколько исполнительных механизмов, которые локально деформируют поверхности оптики для того, чтобы скорректировать возникающие искажения луча вследствие турбулентности атмосферы. Элементами адаптивной оптики могут быть адаптивная (деформируемая) линза или адаптивное (деформируемое) зеркало. Принцип адаптивной оптики впервые появился в астрономии, а согласно источнику [1] он опробован и успешно применяется в лазере воздушного базирования, который США предполагают использовать в противоракетной обороне от баллистических ракет на активном участке их траектории. Более рациональным было бы, когда сигнальный лазер (маячок) системы адаптивной оптики был бы встроен в МСЛС.
Наиболее оптимальным было бы наличие на платформе одного основного компьютера с несколькими резервными. Основной компьютер управлял бы всеми указанными выше механизмами и согласовывал бы их совместную работу. А резервные компьютеры необходимы на случай поломки основного и контролирования работы основного. При этом системы управления линзой с управляемым фокусным расстоянием и адаптивной оптикой могли бы быть встроены в МСЛС. В этом случае можно было бы осуществить дублирование всех систем и обеспечить высокую надежность устройства.
Как было сказано выше, лазерное излучение исходит из предлагаемого устройства на высоте около 12 км и выше над уровнем моря, поэтому УЗРЛРД начинает свою работу по ускорению ракеты с ЛРД, когда ракета с ЛРД находится примерно на той же высоте. Для доставки на эту высоту ракеты с ЛРД может быть использована первая ступень ракеты с обычным РД (ЖРД, РДТТ) или авиационный, или аэростатический носитель. Более экономичным было бы использовать авиационный носитель с воздушно-реактивными двигателями, для которого высота полета порядка 12 км является вполне реальной, т.к. эта высота близка высоте полета современных коммерческих самолетов. При этом задачей такого носителя является доставка ракеты с ЛРД на требуемую высоту и сброс ее в близи УЗРЛРД. Сам носитель с прикрепленной к нему ракетой с ЛРД будет взлетать как обычный грузовой самолет с авиационного аэродрома, а после сброса ракеты будет приземляться на том же или другом аэродроме. Начальная скорость полета ракеты с ЛРД после ее сброса с носителя не имеет особого значения для работы предлагаемого устройства.
Платформа, подвешенная на воздушных шарах и удерживаемая гибкими растяжками на значительной высоте под воздействием ветровых и весовых нагрузок, является гибким и нежестким сооружением. Поэтому платформа, на которой расположены поворотное зеркало, и другие системы при этом могут совершать колебательные движения относительно вертикальной оси, что может привести к ошибкам при нацеливании лазерного луча. Для того, чтобы избежать этого негативного эффекта или уменьшить влияние на точность прицеливания исходящего потока лазерного излучения, платформу можно выполнить с самостабилизирующимся механизмом (п. 4 формулы изобретения). В простейшем случае, когда частота колебаний незначительная, самостабилизирующийся механизм может быть реализован таким образом, что платформа выполняется из отдельных подвижных частей. При этом имеется рама, к которой присоединены воздушные шары и растяжки. К этой раме через карданный механизм присоединяется площадка с расположенными на ней поворотным зеркалом и другими системами и грузом для смещения центра масс площадки ниже рамы платформы. В этом случае площадка с грузом будет являться маятником по отношению к раме и при определенном отклонении рамы от горизонтальной плоскости, например из-за порывов ветра, площадка будет стремиться оставаться в горизонтальном положении. Для гашения колебаний площадки относительно рамы могут быть применены специальные механизмы их гашения. В более сложном варианте самостабилизирующийся механизм может быть выполнен подобно стабилизаторам башни современных танков. Для танков система стабилизации необходима для повышения точности прицеливания при движении танка по пересеченной местности. При этом стабилизация осуществляется в трех плоскостях и имеет в своем составе гироскоп и набор датчиков с оборудованием для выработки команд приводам башни. В нашем случае вместо башни буде площадка, а вместо корпуса танка - рама платформы.
Воздушные шары, применяемые в предлагаемом устройстве, с течением времени пропускают (травят) через свои стенки легкий газ - наполнитель. Для компенсации потерь наполнителя воздушных шаров к ним вдоль растяжек могут с земли подводиться трубочки, через которые производится подпитка наполнителем (п. 5 формулы изобретения). При этом обеспечивается долговременное функционирование воздушных шаров и всего устройства в целом.
Для доставки обслуживающего и ремонтного персонала на платформу с целью замены изношенных частей и осмотра УЗРЛРД могут использоваться дирижабли.
Предлагаемое устройство позволяет запускать ракеты с лазерным ракетным двигателем, у которых рабочее тело может иметь твердую структуру, прикрепленную к последней ступени ракеты или к головной части ракеты. В этом случае тяга ЛРД возникает благодаря испарению твердого рабочего тела ракеты под действием падающего на его поверхность мощного лазерного излучения. Для придания рабочему телу большей жесткости и твердости оно может изнутри и снаружи армироваться силовыми элементами, например металлическими стержнями. В этом случае ракета будет представлять собой головную часть или последнюю ступень ракеты с головной частью, в которой размещена полезная нагрузка с присоединенным к ней цилиндром из твердого рабочего тела. Лазерное излучение непосредственно направляется на донную часть ракеты, где происходит абляционное испарение рабочего тела и соответственно возникает тяга ракеты с ЛРД. В нашем случае твердое рабочее тело изготавливают методом отливки в форму, в которую предварительно укладывают армирующие элементы (при необходимости). Если рабочим телом является полимер, то процесс отливки рабочего тела будет похож на отливку пластмассовых изделий. При этом достигается максимальное удешевление запуска ракеты, заключающееся в том, что нет необходимости в формировании для каждой ступени дорогостоящих баков, корпуса ракеты, дорогостоящих ракетных сопел с камерами давления, насосов для подачи рабочего тела, системы разделения ступеней ракеты и т.д. К тому же отпадает опасность падения отработанных ступеней на землю. В предложенном варианте твердое рабочее тело в процессе полета ракеты с ЛРД будет постепенно терять свою часть рабочего тела вплоть до полного его выгорания, подобно тому, как сгорает электрод при работе сварочного устройства.
Применение предлагаемого устройства позволяет существенно (в несколько раз) увеличить долю полезной нагрузки относительно стартовой массы ракеты и обеспечить большую безопасность в сравнении с традиционными способами запуска ракеты. Предлагаемое устройство кроме своего прямого назначения можно эффективно использовать для сбивания с орбиты космического мусора и ненужных спутников, в том числе движущихся на орбите выше 550 км над поверхностью земли (источник [1]).
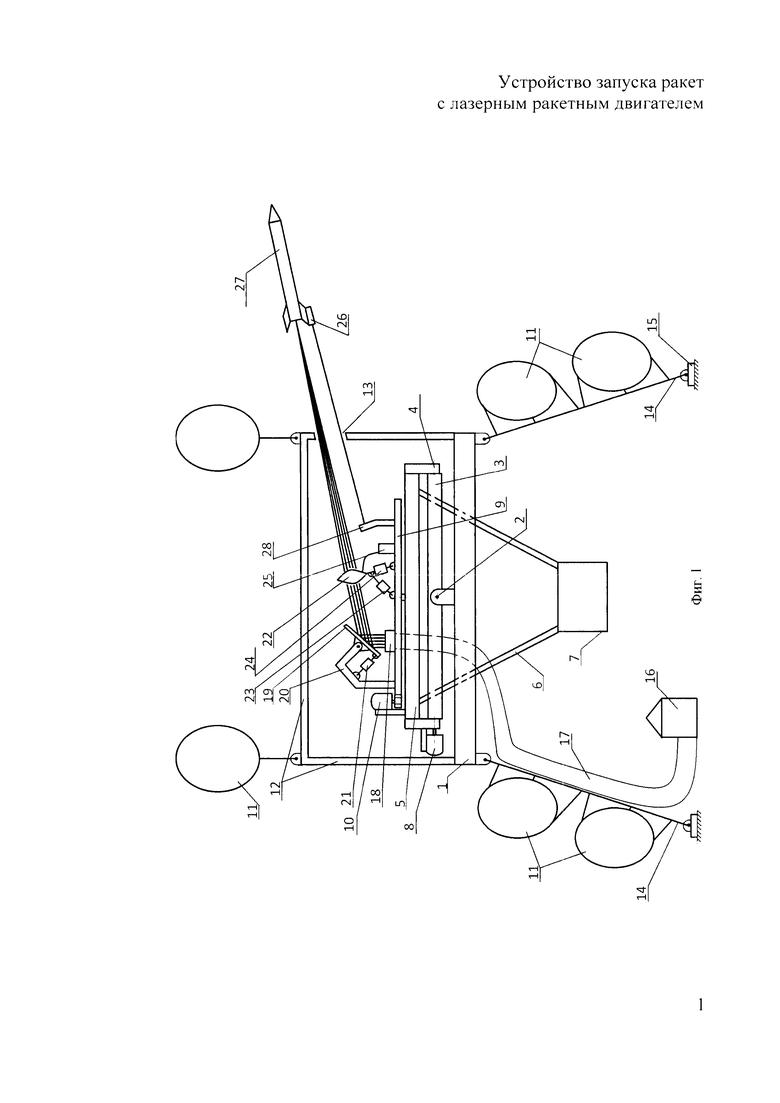
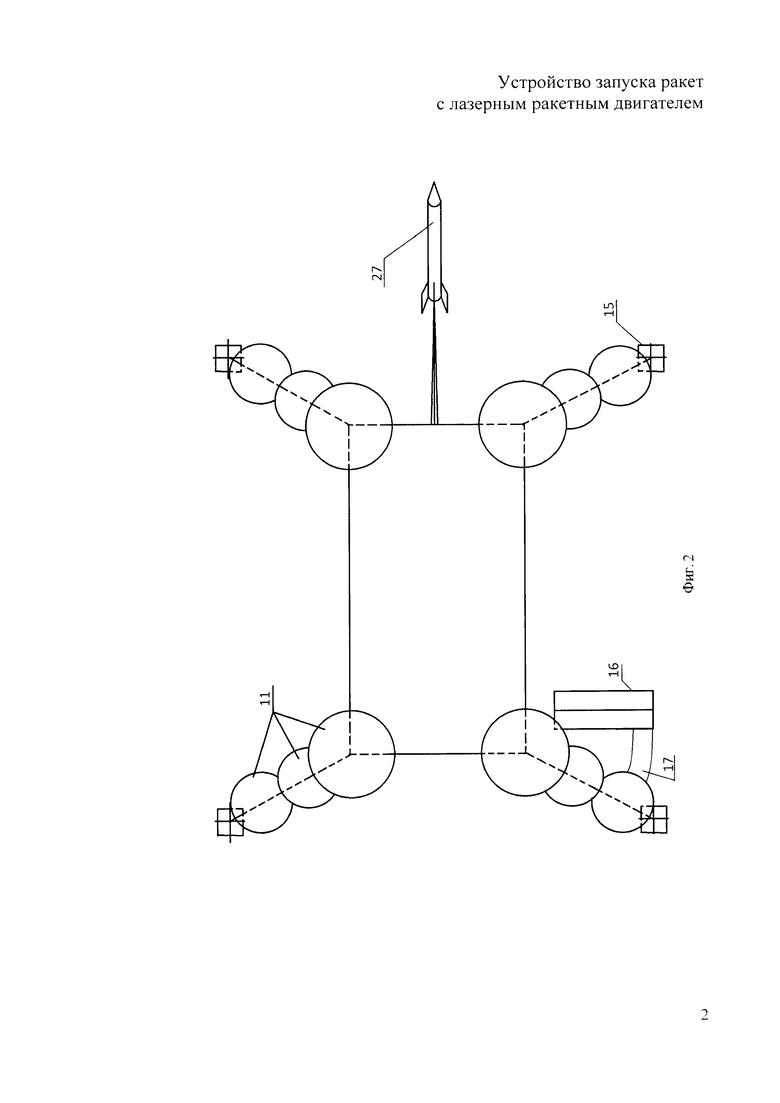
Изобретение поясняется чертежами, где на фиг. 1 схематически показано устройство запуска ракет с лазерным ракетным двигателем по пп. 1, 2, 3, 4 формулы изобретения (вид сбоку), на фиг. 2 - вид сверху на предлагаемое устройство.
Предлагаемое устройство, показанное на фиг. 1, содержит в своем составе сборную платформу, состоящую из основной рамы 1, которая через шарнирную связь 2 соединена с промежуточной рамой 3. Промежуточная рама 3 через другую шарнирную связь 4 соединяется с верхней рамой 5. К верхней раме 5 через стержни 6 прикреплен груз 7, расположенный ниже основной рамы 1. Основная рама 1, промежуточная рама 3 и верхняя рама 5, связанные между собой перпендикулярно расположенными относительно друг друга шарнирными связями 2 и 4, образуют конструкцию, подобную карданному механизму. При этом груз 7 благодаря шарнирным связям 2 и 4 между рамами обеспечивает равновесное положение верхней рамы 5 при различных смещениях основной рамы 1. На шарнирных связях 2 и 4 между рамами имеются специальные приводы: привод 8 между рамами 3 и 5 (привод между рамами 1 и 3 не показан, чтобы не усложнять рисунок, но он аналогичен приводу 8), которые стремятся погасить возможные колебания рамы 5 с грузом 7 при смещении основной рамы 1. Таким образом, происходит стабилизация платформы. На верхней раме 5 имеется поворотная площадка 9 со своим приводом поворота 10, необходимым для того, чтобы производить нацеливание потока лазерного излучения в горизонтальной плоскости. Для удержания платформы в воздухе к основной раме 1 прикреплены сверху воздушные шары 11 в необходимом количестве. Со всех сторон платформа укрыта утепленными стенками 12 для обеспечения необходимых микроклиматических условий для оборудования и обслуживающего персонала. В том месте, где проходит лазерный поток излучения к ракете в стенке может быть либо открывающаяся створка, либо прозрачное окно 13. К основной раме 1 через зацепы крепятся четыре растяжки 14, представляющие собой канаты, нижние концы которых прикреплены через зацепы к забетонированным в грунт фундаментам 15. На растяжках имеются воздушные шары 11 для снятия с них нагрузки от собственного веса. На поверхности земли имеется помещение 16, в котором расположены многочисленные источники лазерного излучения (например, оптоволоконные или химические лазеры). В помещении 16 все излучение лазеров направляется в оптические волокна, которые собираются в один пучок 17. Собранные в один пучок 17 оптоволокна прикреплены к одной из растяжек 14. Верхний конец пучка 17 крепится к площадке 9 и соединяется с собирателем 18 лучей, назначение которого заключается в том, чтобы на выходе из него все отдельные лазерные лучи от отдельных оптических волокон были направлены строго параллельно друг другу (с минимальным расхождением). Поворотное зеркало 19 крепится к площадке 9 кронштейном 20 через шарнир в ее середине и имеет привод 21 для поворота вокруг шарнира. Оптика 22 показана условно и имеет приводы: 23 - привод поворота оптики 22 относительно оси шарнира, 24 - привод линейного смещения оптики 22 относительно шарнира, 25 - привод для изменения поверхности оптики 22 с целью компенсации влияния турбулентности атмосферы по принципу адаптивной оптики и фокусировки луча. Оптика 22 также имеет в своем составе линзу с изменяемым фокусным расстоянием от отдельного привода (не показанного на фиг. 1), который используется для того, чтобы сконцентрировать все лазерные лучи в центре зоны облучения ЛРД. На ракете с ЛРД имеется маячковый лазер 26, который при движении ракеты 27 с ЛРД под управлением бортового компьютера ракеты постоянно направлен на датчик 28. При этом бортовой компьютер ракеты 27 с помощью гироскопа постоянно отслеживает координаты положения ракеты 27 относительно датчика 28, расположенного на платформе, и таким образом производит нацеливание. Датчик 28 имеет двойное действие: с одной стороны этот датчик в режиме реального времени улавливает направление луча маячкового лазера 26 и тем самым указывает направление, на котором находится ракета 27, а с другой стороны улавливает искажение луча маячкового лазера 26 вследствие турбулентности атмосферы. Маячковый лазер 26 по отраженному его лучу от поверхности датчика 28 непрерывно определяет расстояние между ракетой и платформой. В устройстве имеется компьютер, не показанный на фиг. 1. Этот компьютер обрабатывает сигналы от датчика 28 и другие поступающие в него сигналы и подает команды на приводы 10, 21, управляющие положением поворотного зеркала 19, и приводы 23, 24, 25, управляющие положением и изменением поверхностей оптики 22. Кроме того, этот компьютер может управлять механизмом самостабилизации платформы.
Предлагаемое устройство работает следующим образом. С высоты выше высоты платформы с авиационного носителя (не показан на фиг. 1) производится сброс ракеты 27 с ЛРД. Многочисленные источники лазерного излучения, расположенные в помещении 16, вырабатывают лазерные лучи. Суммарная мощность лучей, вырабатываемая всеми лазерами, достаточна для обеспечения работы ЛРД на ракете 27. Далее все излучение по пучку 17 оптоволокон, достигнув его верхнего конца, проходит через собиратель 18 лучей и попадает на поворотное зеркало 19, которое отклоняется приводом 21, а при необходимости разворота вокруг вертикальной оси - с помощью привода поворота 10 площадки 9. Датчик 28, получая луч от маячкового лазера 26, передает информацию о положении ракеты 27 относительно платформы и о турбулентности воздуха между платформой и ракетой 27 в компьютер устройства. По определенной программе компьютер устройства рассчитывает и подает команды на привод 21 и привод поворота 10 площадки 9 для изменения положения поворотного зеркала 19, а также на приводы 23, 24, 25 для коррекции положения оптики 22 и кривизны ее оптических поверхностей с целью компенсации размывание луча из-за турбулентности воздуха. Маячковый лазер 26, определяя расстояние между ракетой 27 и платформой, посылает данные на бортовой компьютер ракеты 27, который в свою очередь передает эту информацию по радиосвязи на компьютер устройства, расположенный на платформе. По этим данным компьютер устройства рассчитывает команды, которые необходимо подать на привод 25 оптики 22 для обеспечения требуемого фокусного расстояния для фокусировки луча на зоне облучения ЛРД.
1. Assessment of Long Range Laser Weapon Engagements: The Case of the Airborne Laser Jan Stupl and Goetz Neuneck Science and Global Security, 2010, Volume 18, pp. 1-60.
2. Элементарный учебник физики: Учебное пособие. В 3-х т. / Под ред. Г.С. Ландсберга. Т. I. Механика. Теплота. Молекулярная физика. - 10-e изд., перераб. - М.: Наука. Главная редакция физико-математической литературы, 1985. - 608 с., ил.
Изобретение относится к ракетно-космической технике и может использоваться для запуска полезных грузов на околоземную орбиту. В устройстве запуска ракет с лазерным ракетным двигателем (ЛРД) имеется платформа, на которой расположено поворотное зеркало с механизмом управления. Эта платформа подвешена к воздушным шарам и прикреплена к земной поверхности с помощью растяжек. По пучкам оптических волноводов лазерное излучение от расположенных на земной поверхности источников лазерного излучения передается на поворотное зеркало с механизмом управления, направляющее поток лазерного излучения в зону облучения ЛРД. Техническим результатом изобретения является увеличение доли полезной нагрузки относительно стартовой массы ракеты и повышение безопасности. 4 з.п. ф-лы, 2 ил.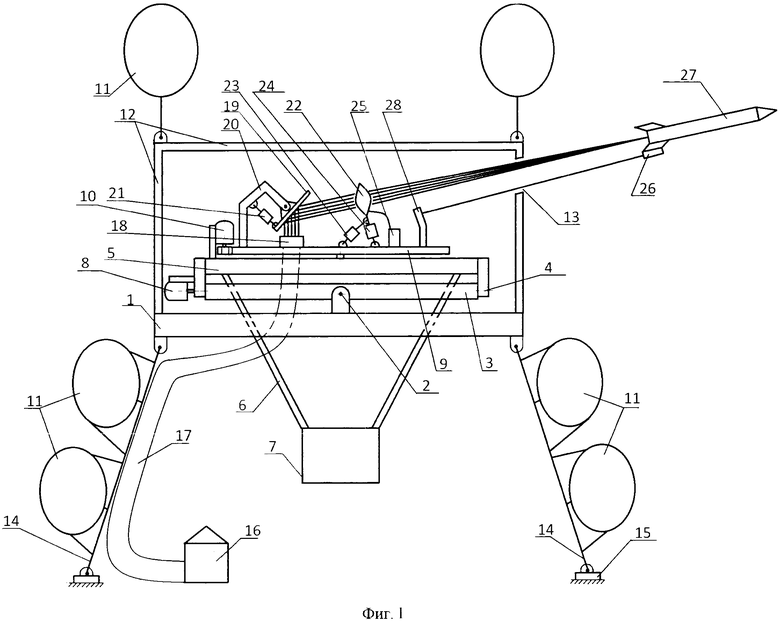
1. Устройство запуска ракет с лазерным ракетным двигателем, содержащее источники лазерного излучения, не менее одного пучка оптических волноводов, платформу, на которой расположено поворотное зеркало с механизмом управления, воздушные шары, не менее одной растяжки, отличающееся тем, что платформа, на которой расположено поворотное зеркало с механизмом управления, подвешена к одному или большему числу воздушных шаров и прикреплена к земной поверхности с помощью не менее одной растяжки, по одной или нескольким из которых проложены не менее одного пучка оптических волноводов, нижние концы которых имеют возможность получать лазерное излучение от расположенных на земной поверхности источников лазерного излучения, а верхние концы имеют возможность передавать лазерное излучение с малым расхождением на поворотное зеркало с механизмом управления, которое может направлять поток лазерного излучения в зону облучения лазерного ракетного двигателя.
2. Устройство по п. 1, отличающееся тем, что на платформе, на которой расположено поворотное зеркало с механизмом управления, имеется оптическая линза с управляемым фокусным расстоянием.
3. Устройство по п. 1, отличающееся тем, что на платформе, на которой расположено поворотное зеркало с механизмом управления, имеется адаптивная оптика.
4. Устройство по п. 1, отличающееся тем, что платформа, на которой расположено поворотное зеркало с механизмом управления, имеет самостабилизирующий механизм.
5. Устройство по п. 1, отличающееся тем, что к воздушным шарам подведены трубочки, через которые подводится с земли легкий газ.
| АЭРОКОСМИЧЕСКИЙ ЛАЗЕРНЫЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2266420C2 |
| US 6488233 B1, 03.12.2002 | |||
| JP H5186000 A, 27.07.1993 | |||
| CN 102390547 A, 28.03.2012. | |||

