Экраноплан с водометным движителем относится к области транспортных средств на динамической воздушной подушке и касается создания экранопланов для перемещения над поверхностью воды.
Имеются экранопланы, которые в полетном режиме имеют возможность поддержания своей массы над поверхностью земли или воды благодаря динамической воздушной подушке, возникающей за счет аэродинамического экранного эффекта. Однако такие экранопланы, не имеющие в полетном режиме физического контакта с поверхностью воды, приводятся в движение с помощью воздушных движителей, например, воздушно-винтовых, воздушно-реактивных двигателей. Поскольку плотность воздуха, используемого в качестве рабочего тела в воздушных движителях, почти в 800 раз меньше плотности воды, используемого в качестве рабочего тела в водных движителях (гребной винт, водометный движитель), экономичность воздушных движителей очень сильно уступает экономичности водных движителей. В связи с этим в предлагаемом устройстве и его аналогах используется водометный движитель в качестве основного движителя, который используется для создания основной силы тяги экраноплана.
Для обеспечения устойчивого движения любого экраноплана, и, в частности, предлагаемого устройства, необходимо обеспечение продольной, поперечной и путевой статической устойчивости. Поперечная статическая устойчивость - это способность экраноплана возвращаться в положение равновесия после случайного накренения, т.е. поворота вокруг собственной продольной оси устройства, проходящей вдоль фюзеляжа от хвостовой его части к носовой. Путевая статическая устойчивость - это способность экраноплана возвращаться в положение равновесия после случайного отклонения от направления движения в горизонтальной плоскости. Продольная статическая устойчивость - способности экраноплана к возвращению в прежнее положение равновесного установившегося полета после случайного поворота в продольной плоскости под действием кратковременных малых внешних возмущений. Продольная плоскость - плоскость симметрии экраноплана, проходящая через продольную ось.
Аналогом предлагаемого устройства является изобретение, описанное в патенте РФ №2140370, «Экраноплан "ruswind" (варианты)», изобретатель: Екимов С.В., МПК: B60V 1/00. Аналог содержит оборудованный движителем фюзеляж, воздушный киль, расположенный в хвостовой части фюзеляжа. Фюзеляж имеет руль направления, а крыло имеет рули высоты. Движитель, располагающийся в передней части экраноплана, может быть выполнен винтовым или водометным. Крыло с рулями высоты установлено в задней части экраноплана. Работа аналога осуществляется таким образом. В исходном положении экраноплан находится на поверхности воды. При этом крыло экраноплана имеет максимальный угол атаки. При увеличении скорости экраноплана движителем задняя часть экраноплана отрывается от опорной поверхности, а движитель вместе с передней частью устройства остается на водной поверхности. Поток воздуха, действуя на крыло экраноплана, создает подъемную силу, которая, преодолевая силу тяжести фюзеляжа, приходящуюся на крыло, поднимает заднюю часть фюзеляжа. Происходит поворот фюзеляжа относительно движителя. При этом угол атаки крыла уменьшается, что приводит к стабилизации положения задней части экраноплана по высоте. Управление направлением движения экраноплана происходит как у самолета, с помощью рулей высоты и киля с рулем поворота. Недостатком данного устройства является то, что в описании патента нет сведений о том, как обеспечивается статическая устойчивость самого движителя, т.к. если не будет обеспечена его стабилизация, не будет обеспечена стабилизация и остальной части устройства. Есть лишь вариант применения антикрыла для удержания движителя на опорной поверхности, но само антикрыло не сможет обеспечить продольную статическую устойчивость движителя и соответственно переднюю часть устройства от случайного смещения в каком-либо направлении по высоте. Другим недостатком является то, что фюзеляж в полетном режиме находится в наклоненном положении, что, во-первых, создает отрицательную подъемную силу, во-вторых, это очень не удобно для использования устройства в качестве транспортного средства для перевозки грузов, кроме как использования его в качестве аттракционно-развлекательного средства. Еще одним недостатком является плохая управляемость устройства с помощью воздушных рулей особенно на малых скоростях полета. Под управляемостью транспортного средства будем понимать скорость реакции (отклик) при отклонении руля при необходимости изменения или коррекции его движения в каком-либо направлении.
Другим аналогом предлагаемого устройства является изобретение, описанное в патенте РФ №2299822, «Легкий экраноплан», изобретатели: Картовенко М.В., Макаров Ю.В., МПК: B60V. «Легкий экраноплан» состоит из водоизмещающего корпуса с кабиной для экипажа. К его корпусу прикреплено крыло малого удлинения. На хвостовой части установлено воздушное оперение, состоящее из килей с рулями направления и стабилизатор с рулем высоты. «Легкий экраноплан» снабжен автономной (отдельной) мотоустановкой внутри водоизмещающего корпуса, в котором установлен двигатель с дистанционным управлением из кабины пилота. Мотоустановка соединена с корпусом экраноплана двумя параллельными штангами, шарнирно закрепленными на корпусе экраноплана и мотоустановки. После выхода экраноплана на открытую водную поверхность пилот с помощью рулей направления на мотоустановке на небольшой скорости выруливает против ветра, увеличивая обороты двигателя, экраноплан совершает разгон. А при достижении взлетной скорости пилот плавно берет штурвал на себя и производит взлет. После чего полет осуществляется на высоте 1,5-2 м на экранном режиме. Одним из недостатков «Легкого экраноплана» является то, что, как указано в описании, его можно использовать для спортивных или для туристических целей, то есть не для перевозки грузов. Другим недостатком является недостаточная продольная устойчивость аналога вследствие негативного влияния вихревого потока от крыла на горизонтальный стабилизатор. Так же, как и первый аналог, данное устройство обладает плохой управляемостью с помощью воздушных рулей, особенно на малых скоростях полета.
Еще одно устройство, которое можно принять в качестве прототипа предлагаемого устройства, описано в патенте РФ №2124451, «Морское судно», изобретатель: Сабино Роккотелли, МПК: В63В 1/12, B60V 1/08. Устройство содержит один центральный и два боковых корпуса, поддерживающих грузовую платформу, имеющую профиль крыла для создания аэродинамической подъемной силы при движении судна, причем от днищ корпусов проходят вниз соответствующие стабилизаторы, представляющие собой вертикальные стойки. В передней стойке располагается основной водный движитель и элементы управления, а в задних стабилизаторах установлены элементы управления. Элементами управления являются вертикальные и горизонтальные рули. Здесь и далее вертикальный руль - руль направления, горизонтальный руль - руль высоты. Недостатком устройства является то, что вертикальные стабилизаторы могут обеспечить только путевую статическую устойчивость. Продольная и поперечная стабилизация по описанию осуществляются благодаря «управляемым с помощью высокочастотной системы управления подводным крыльям (горизонтальным рулям)», то есть благодаря автоматической системе или автопилоту. Таким образом, на данном устройстве конструктивная компоновка не обеспечивает продольную и поперечную статическую устойчивость. Но в сравнении с аналогами, эффективная управляемость может быть обеспечена практически на всех скоростях, т.к. устройство управляется подводными рулями. При этом три стабилизатора погруженных в водную среду создают значительные силы сопротивления движению устройства. По сути три стабилизатора с подводными рулями и использованием «обычных конструкций гребных винтов или водометов» сближает данное устройство с судном на подводных крыльях с аэродинамической разгрузкой, максимальная скорость которого может составлять порядка 120-150 км/ч, что существенно ниже, чем у классических экранопланов.
Задачей данного изобретения является создания экраноплана для перемещения над поверхностью воды с помощью водометного движителя, обладающего высокой продольной и путевой статическими устойчивостями, а также высокой продольной и путевой управляемостью на всех режимах движения.
Поставленная задача решается тем, что устройство выполняется из, по меньшей мере, одного водометного движителя, крыла, фюзеляжа с кабиной для размещения в ней пилотов и грузовым отсеком, вертикального и горизонтального стабилизаторов, отличающийся тем, что, по меньшей мере, один из водометных движителей расположен в хвостовой части фюзеляжа и выполнен с полнонапорным водозаборником, постоянно смоченная вертикальная часть которого является вертикальным стабилизатором с установленным на нем вертикальным рулем и на постоянно смоченной части полнонапорного водозаборника установлен горизонтальный стабилизатор с горизонтальными рулями. При этом центр масс всего экраноплана с водометным движителем находится впереди общего центра давления крыла с фюзеляжем, а горизонтальный стабилизатор установлен с отрицательным углом атаки и обеспечивает продольное равновесие. Как указано в источнике [1] на стр. 188, водометный движитель или кратко просто водомет, судовой движитель, у которого сила, движущая судно, создается выталкиваемой из него струей воды. Водометный движитель представляет собой профилированную трубу (водовод), в которой водяной поток ускоряется лопастным механизмом (гребной винт, крыльчатка насоса), энергией сгорания топлива или давлением сжатого газа и обеспечивается направленный выброс струи. Назовем часть водовода водомета, через которую поступает вода в водомет - водозаборником, а ту часть водовода водомета, через которую вода, ускоряемая в водомете, выталкивается за пределы водомета - соплом. Под приемным отверстием водомета будем понимать сечение водозаборника, через которое в нее поступает вода, а под выходным сечением водомета - сечение сопла, через которое происходит выброс воды из водомета. Вода поступает в водовод через приемное отверстие, которое всегда располагается ниже уровня воды. Обычно, согласно источнику [2] (стр. 10), реакция струи, выбрасываемой водометом, направлено в сторону, противоположную движению судна, и является силой, движущей судно. Экраноплан с водометным движителем (далее сокращенно ЭВД) может иметь в своем составе не один, а несколько водометов, которые обеспечивают своей работой разгон, взлет (отрыв устройства от поверхности воды, кроме водозаборников самих этих водометов) и поддержание ЭВД в основном режиме движения (основным режимом движения транспортного средства на динамической воздушной подушке, по источнику [2] будем называть режим движения после его взлета и движение со скоростями близкими к полной скорости хода). Такие водометы располагаются в хвостовой части фюзеляжа и имеют полнонапорные водозаборники. В соответствии с источником [2] (стр. 170), полнонапорным водозаборником является водозаборник, у которого плоскость приемного отверстия нормальна движению судна. Полнонапорный водозаборник выполняется плавно обтекаемой формы для уменьшения сопротивления от набегающего потока. Постоянно смоченной называется та часть полнонапорного водозаборника водомета, которая остается под поверхностью воды при любом режиме движения ЭВД. Постоянно смоченная вертикальная часть полнонапорного водозаборника, т.е. та часть его, которая находится выше приемного отверстия водомета, но ниже уровня ватерлинии, является вертикальным стабилизатором или точнее выполняет функцию вертикального стабилизатора, на задней части которого установлен вертикальный руль. Также на постоянно смоченной части полнонапорного водозаборника устанавливается горизонтальный стабилизатор, состоящий из двух половин. На задней части каждой из половин единого горизонтального стабилизатора имеются отклоняемые поверхности, которые образуют горизонтальные рули. Для привода водометов могут использоваться различные типы двигателей (ДВС, электрические и т.д.). ЭВД может иметь один и большее число водометных движителей. Кроме водометов с полнонапорными водозаборниками, располагающимся в хвостовой части фюзеляжа, в ЭВД могут быть встроены еще дополнительные вспомогательные водометы, которые могут располагаться в других частях предлагаемого устройства и использоваться, например, во время разгона ЭВД или при буксировке его от причала и обратно к причалу. А также для этих вспомогательных целей могут применяться гребные винты, располагающиеся выше уровня воды основного режима полета предлагаемого устройства или использоваться воздушные движители. Крыло ЭВД выполняется предпочтительно, как у обычных экранопланов, с малым удлинением (отношение квадрата размаха крыла к площади крыла [3]). Фюзеляж в носовой части имеет кабину пилотов, за которой располагается грузовой отсек. В нижней части фюзеляжа могут быть установлены водоизмещающие опоры - в виде поплавков или сама нижняя часть фюзеляжа может иметь форму водоизмещающего судна, как у некоторых гидросамолетов, обеспечивающее фюзеляжу плавучесть и наименьшее сопротивление при движении ЭВД по поверхности воды. На концевых частях крыла также могут быть установлены водоизмещающие опоры - в виде поплавков для обеспечения устойчивого положения ЭВД на поверхности воды и для перемещения его с наименьшим сопротивлением по поверхности воды.
В соответствии с первым законом Ньютона и как указано в источнике [3] (стр. 58, 59) условием установившегося прямолинейного полета является равновесие всех действующих на транспортное средство сил и моментов. Поскольку ЭВД, как и другие транспортные средства, обладает симметрией относительно продольной плоскости, то силы и моменты относительно продольной плоскости уравновешены. Поэтому условием равновесия ЭВД является продольное равновесие - равновесие всех сил и моментов, действующих на ЭВД, в продольной плоскости, которое может выражаться в двух условиях: 1) сумма продольных моментов всех сил относительно центра тяжести ЭВД равна нулю; 2) суммы проекций всех сил на продольную ось и вертикальную ось, расположенные в продольной плоскости, равны нулю. Первое из этих условий - определяющее, поскольку при его выполнении второе условие также будет выполнено. Помимо продольного равновесия для устойчивого полета летательного аппарата, экраноплана и ЭВД, как было сказано выше, необходимо обеспечение продольной, поперечной и путевой статической устойчивости. Самой сложной и главной проблемой экранопланов является обеспечение продольной статической устойчивости. Согласно источнику [3], продольная статическая устойчивость может быть обеспечена, если центр тяжести всего летательного аппарата будет находиться впереди центра давления крыла. Существуют самолеты, выполненные по нормальной (или классической «самолетной») схеме, у которого крыло, создающее основную подъемную силу, установлено впереди горизонтального стабилизатора, а центр масс всего летательного аппарата находится впереди центра давления крыла. При этом продольное равновесие (балансировка) обеспечивается горизонтальным стабилизатором с отрицательным углом атаки, расположенным за крылом в задней части фюзеляжа. Как известно положительный угол атаки обеспечивает подъемную силу направленную вверх, а отрицательный угол атаки - подъемную силу направленную вниз. Крыло имеет положительный угол атаки. В основном экранопланы выполняются по такой же схеме. ЭВД также имеет такую нормальную классическую схему, но отличается от других экранопланов тем, что горизонтальный стабилизатор находится на постоянно смоченной части полнонапорного водозаборника на одном или нескольких водометах расположенных в хвостовой части фюзеляжа. На нормальную («самолетную») схему ЭВД указывают следующие признаки изобретения: «один из водометных движителей, расположен в хвостовой части фюзеляжа», «на котором установлены вертикальный руль и горизонтальный стабилизатор», «центр масс всего экраноплана с водометным движителем находится впереди центров давлений крыла и фюзеляжа», «горизонтальный стабилизатор установлен с отрицательным углом атаки». Признак «горизонтальный стабилизатор установлен с отрицательным углом атаки и обеспечивает продольное равновесие» указывает на то, что горизонтальный стабилизатор, создавая подъемную силу направленную вниз, обеспечивают продольное равновесие в продольной плоскости, т.е. равенство нулю суммы вертикальных проекций всех сил и суммы моментов всех сил относительно центра масс всего ЭВД в продольной плоскости. Под центром масс всего ЭВД понимается общий центр масс всех составных частей ЭВД, включая воду, находящуюся внутри водометов над уровнем воды в водоеме. Ввиду того, что для самолета подъемная сила фюзеляжа незначительна в сравнении с подъемной силой крыла, ее влияние на устойчивость самолета незначительна. Но поскольку для экраноплана подъемная сила фюзеляжа может составлять значительную часть от подъемной силы всего экраноплана, то поэтому в качестве признака изобретения указано, что «центр масс всего экраноплана с водометным движителем находится впереди общего центра давления крыла и фюзеляжа», т.е. единого центра давления крыла с фюзеляжем. Как сказано выше для экранопланов проблематичным является обеспечение продольной статической устойчивости. Объясняется это тем, что с приближением экраноплана к водной поверхности воздух под крылом как бы заневоливается, вследствие чего давление под ним распределяется более равномерно и центр этого давления смещается назад. Это приводит к появлению значительного пикирующего (в сторону водной поверхности) момента на экраноплане. При отходе от водной поверхности все происходит в обратном порядке и экраноплан производит набор высоты с увеличивающимся углом тангажа. Кроме того, с приближением экраноплана к водной поверхности угол скоса (отклонения воздушного потока) вниз за крылом уменьшается, а перед хвостовым горизонтальным воздушным стабилизатором увеличивается, что приводит к еще большему смещению центра давления всего экраноплана (назад или вперед, при подходе или отходе от поверхности воды). То есть такой экраноплан является неустойчивым у водной поверхности и при малейших отклонениях, либо пикирует на водную поверхность, либо уходит в набор высоты. В этом заключается проблема продольной статической устойчивости экраноплана нормальной «самолетной» схемы. Ввиду этого для увеличения продольной статической устойчивости экранопланы выполняют со значительно большим горизонтальным оперением, чем у самолета, а также с максимальным выносом его вверх из зоны смещений скосов потока за крылом или с выносом за пределы размаха крыла. В связи с этим в ЭВД горизонтальное оперение (горизонтальный стабилизатор с горизонтальными рулями) перенесено ниже уровня воды, а точнее в постоянно смоченную часть полнонапорного водозаборника водомета,расположенного в хвостовой части ЭВД. Поскольку полнонапорный водозаборник имеет вертикальную обтекаемую часть, то, постоянно смоченная вертикальная часть водозаборника является вертикальным стабилизатором, на котором установлены вертикальный руль. Так же, как и у обычных экранопланов, в ЭВД горизонтальный стабилизатор установлен с отрицательным углом атаки и обеспечивает продольное равновесие. Расположение горизонтального и вертикального стабилизаторов с вертикальным и горизонтальными рулями под водой на всех режимах движения ЭВД (разгона и основного режима) исключает вредное влияния воздушного потока от крыла на стабилизирующие поверхности, а также на горизонтальные и вертикальные рули, что обеспечивает высокую продольную и путевую статические устойчивости, а также дает более эффективное продольное и путевое управление ЭВД.
В одном из вариантов предлагаемого устройства у водометных движителей с полнонапорным водозаборником, расположенных в хвостовой части фюзеляжа, площадь сечения водовода у лопастного механизма больше площади сечения у приемного отверстия водометного движителя (п. 2 формулы изобретения). Это означает, что площади поперечных сечений водовода от приемного отверстия водомета до лопастного механизма плавно увеличиваются. Плавное изменение сечений обеспечивает минимальное сопротивление. С увеличением скорости ЭВД увеличивается скорость набегающего потока воды, проходящего через приемное отверстие водомета. При прохождении воды через водовод из-за гидравлического сопротивления часть ее кинетической энергии будет безвозвратно теряться. И чем больше входная скорость воды в водомет, тем большая часть ее первоначальной энергии будет теряться. Если же сечение вдоль водовода от приемного отверстия до лопастного механизма увеличивается, то, согласно уравнению Бернулли, скорость потока при этом будет замедляться, а давление будет увеличиваться, т.е. кинетическая энергия потока будет преобразовываться в потенциальную энергию давления. В связи с тем, что при прохождении воды по водоводу теряется лишь кинетическая энергия, то чем большая часть кинетической энергии будет преобразована в рост давления, тем меньше будет потерь первоначальной энергии скоростного напора набегающего потока воды. Кроме того, поскольку давление у лопастного механизма будет повышенное, а скорость входящего на лопатки потока пониженной, эффективность лопастного механизма будет выше ввиду отсутствия кавитации, т.е. КПД водомета будет повышаться. Для уменьшения потерь скоростного потока внутри расширяющегося водовода могут устанавливаться лопатки для плавного расширения и поворота потока.
В другом варианте предлагаемого устройства две половины горизонтального стабилизатора имеют отрицательный угол поперечного V (п. 3 формулы изобретения), что означает установку левой и правой частей горизонтального стабилизатора под определенным углом друг к другу, при котором эти части направлены вниз от водозаборника в виде перевернутой буквы V. Ввиду того, что такая схема горизонтального стабилизатора является перевернутым на 180 градусов эквивалентом схемы обычного несущего крыла с положительным углом атаки и положительным поперечным V, которая в соответствии с источником [3], обеспечивает поперечную статическую устойчивость самолета, то и схема горизонтального стабилизатора с отрицательным углом атаки и с отрицательным углом поперечного V обеспечивает поперечную статическую устойчивость ЭВД.
В соответствии с п. 4 формулы изобретения для обеспечения большей управляемости у выходных сечений сопел водометных движителей могут устанавливаться рули или реверсивно-рулевые устройства, представляющие собой отклоняемые поверхности. Рули, отклоняющие водяную струю, исходящую из водомета, в горизонтальной плоскости обеспечивают путевую (курсовую) управляемость. А рули, отклоняющие водяную струю, исходящую из водомета, в вертикальной плоскости обеспечивают управляемость в продольной плоскости. А также у выходных сечений сопел водометных движителей могут устанавливаться реверсивные устройства для обеспечения реверсирования движения судна. Реверсивное и рулевое устройства могут быть объединены в едином реверсивно-рулевом устройстве [2].
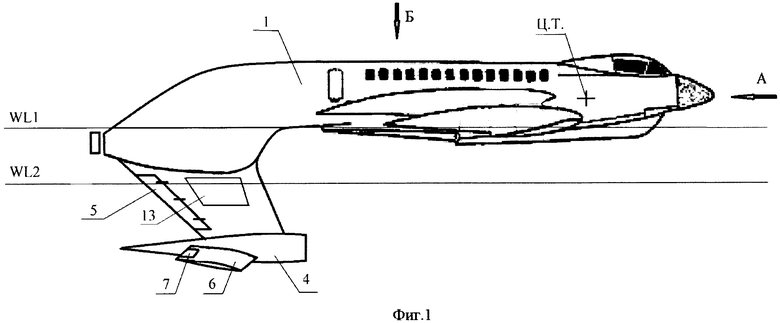
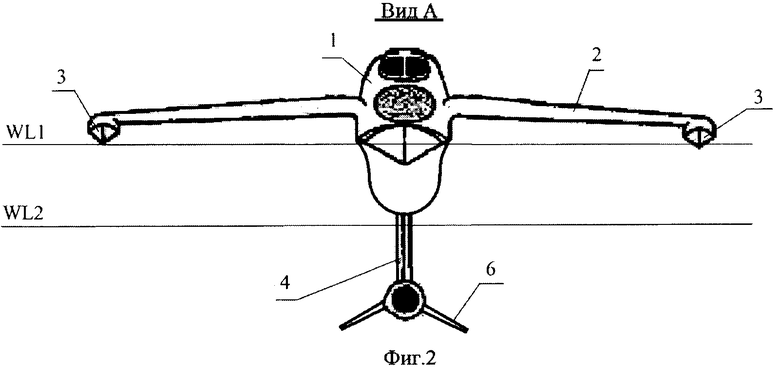
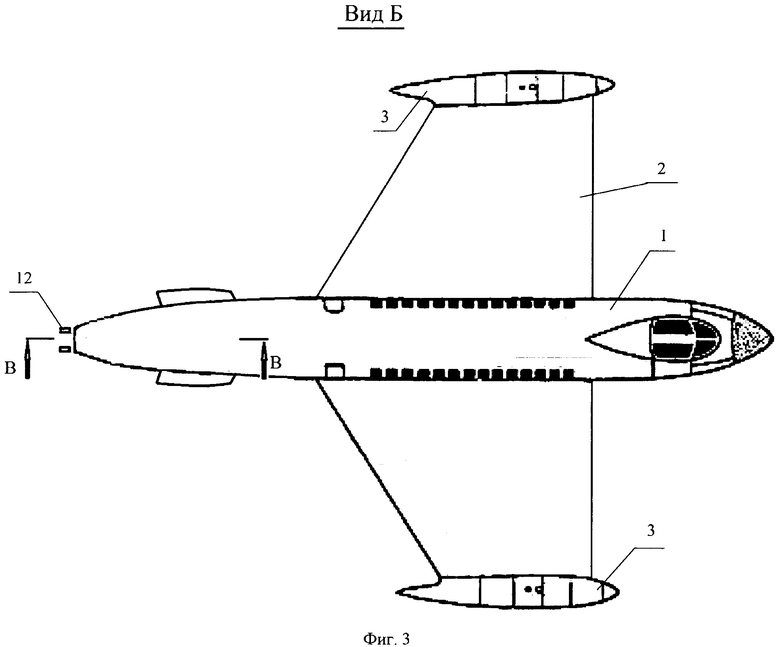
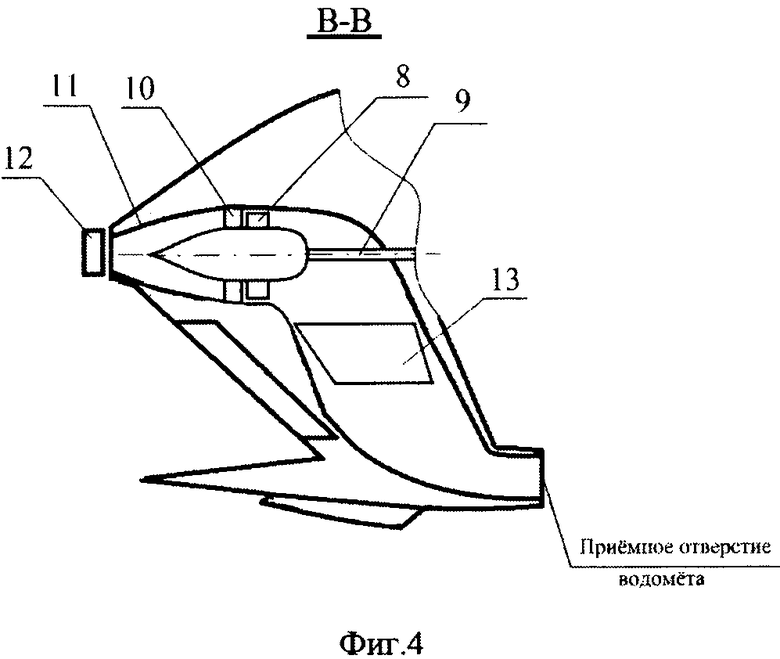
Сущность изобретения поясняется чертежами, где на фиг. 1 схематически показан предлагаемый ЭВД (вид сбоку), на фиг. 2 - вид по А на фиг. 1 и на фиг. 3 - вид по Б на фиг. 1 (вид сверху на ЭВД), фиг. 4 - разрез В-В на Фиг. 3.
На этих фигурах позицией WL1 обозначено положение ватерлинии, когда ЭВД неподвижно или перемещается с низкой скоростью по поверхности воды, и позицией WL2 положение ватерлинии, когда ЭВД перемещается с полной скоростью хода на основном режиме движения.
ЭВД имеет фюзеляж поз. 1, к которому с обеих сторон прикреплены две половины крыла поз. 2, представляющие собой вместе единую прочную конструкцию (Фиг. 1, 2). На концах крыла имеются водоизмещающие корпуса поз. 3. Нижняя часть фюзеляжа поз. 1 имеет форму водоизмещающего судна, обеспечивающее минимальное сопротивление при движении ЭВД по поверхности воды. Фюзеляж поз. 1 совместно с корпусами поз. 3 обеспечивают устойчивую плавучесть, при нахождении ЭВД в покое и минимальное сопротивление при движении его на режиме разгона или перемещения по поверхности воды. В хвостовой части фюзеляжа установлен водомет с полнонапорным водозаборником поз. 4. В вертикальной задней части водозаборника поз. 4 имеется вертикальный руль поз. 5. В нижней части водозаборника поз. 4 располагается стреловидный горизонтальный стабилизатор поз. 6 с горизонтальными рулями поз. 7. Причем, в соответствии с п. 3 формулы изобретения, две половины горизонтального стабилизатора поз. 5 имеют отрицательный угол поперечного V крыла, т.е. они направлены вниз от оси приемного отверстия водозаборника (Фиг. 2). Лопастной механизм поз. 8 водомета приводится во вращение через вал поз. 9 двигателем, который не показан (Фиг. 4). За лопастным механизмом поз. 8 имеются неподвижные лопатки поз. 10 спрямляющие водяной поток. Далее установлено сопло поз. 11. Согласно п. 2 формулы изобретения, площадь сечения водовода у лопастного механизма поз. 8 больше площади сечения приемного отверстия водометного движителя. А в соответствии с п. 4 формулы изобретения, у сечения сопла имеются рули поз. 12, которые могут поворачиваться относительно вертикальных осей. На вертикальных частях с обеих сторон водозаборника поз. 4 расположены, две откидывающиеся стенки поз. 13, которые открываются в начале разгона ЭВД и затем закрываются с помощью специального привода (например, гидро- или электропривода), который не показан на чертежах, чтобы их не усложнять. Данные откидывающиеся стенки поз. 13 необходимы для того, чтобы обеспечить оптимальную работу водомета на малых скоростях движения ЭВД, т.к. на таком режиме необходимо обеспечить большую площадь сечения, через которую поступает вода в водозаборник, чем на больших скоростях движения ЭВД [2]. Как показано на Фиг. 1, центр тяжести Ц.Т. всего ЭВД располагается впереди крыла поз. 2 и горизонтального стабилизатора поз. 6. Подъемная сила крыла поз. 2 направлена вверх, а подъемная сила горизонтального стабилизатора поз. 6 направлена вниз. Сила тяжести всего ЭВД приложено в центре тяжести Ц.Т. и направлено вниз. Благодаря тому, что сумма сил тяжести всего ЭВД и подъемной силы горизонтального стабилизатора равна подъемной силе крыла поз. 2 и благодаря тому, что момент подъемной силы крыла с фюзеляжем относительно Ц.Т. ЭВД, равен по величине и направлен противоположно моменту подъемной силы горизонтального стабилизатора поз. 6 относительно Ц.Т. ЭВД, обеспечивается продольное равновесие ЭВД.
Работа ЭВД осуществляется следующим образом. В начале ЭВД находится в покое на ватерлинии WL1. Как видно на Фиг. 1, водомет при этом практически полностью заполнен водой. После запуска водометного движителя благодаря тяге водометного движителя начинается разгон ЭВД. При этом откидывающиеся стенки поз. 13 открыты. Далее в процессе разгона скорость ЭВД достигает значения, при котором площадь входного сечения водомета становиться достаточной для эффективной работы водомета и откидывающиеся стенки поз. 13 принудительно закрываются с помощью привода. По достижении скорости ЭВД, достаточной для его взлета, подъемная сила крыла поз. 2 обеспечивает отрыв и подъем ЭВД над водной поверхностью на достаточную высоту с ватерлинией WL2. Регулирование высоты полета ЭВД над поверхностью воды осуществляется горизонтальными рулями поз. 7, управление ЭВД по курсу осуществляется рулями поз. 12 совместно с вертикальным рулем поз. 5. В случае, если под влиянием какого-либо возмущения увеличится угол атаки ЭВД, угол атаки горизонтального стабилизатора поз. 6 уменьшится по величине и соответственно хвостовая часть ЭВД начнет подниматься вверх, а угол атаки ЭВД при этом будет уменьшаться до первоначальной величины. При случайном уменьшении угла атаки ЭВД все происходит наоборот. Таким образом, обеспечивается продольная статическая устойчивость ЭВД. Поскольку две плоскости горизонтального стабилизатора поз. 5 имеют отрицательный угол поперечного V крыла, то при возникновении, под действием возмущающего воздействия, угла крена, та плоскость, которая будет выше другой, будет иметь больший угол атаки, чем другая. Вследствие этого на плоскостях горизонтального стабилизатора возникнет момент сил, стремящийся уменьшить угол крена и обеспечивающий поперечную статическую устойчивость. Вертикальная часть водозаборника, являясь вертикальным стабилизатором, расположена в задней части ЭВД. При отклонении ЭВД от курса на вертикальном стабилизаторе возникает боковая сила, стремящаяся возвратить ЭВД на прежний курс. Таким образом, обеспечивается путевая статическая устойчивость.
Источники информации
1. Большая Советская Энциклопедия (В 30 томах). Гл. ред. A.M. Прохоров., 3-е изд. -М.: «Советская Энциклопедия», 1971, Т. 5, Вешин-Газли, 1971, 640 с.
2. Русецкий А.А., Жученко, М.М., Дубровин О.В. Р88. Судовые движители. -Л.: «Судостроение», 1971, 288 с.
3. Капковский Я. К20. Летающие крылья / Пер. с польск. Ю.П. Терехова. - М.: ДОСААФ, 4988. - 127 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВОДОМЁТОМ | 2013 |
|
RU2534094C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭКРАННЫМ ЭФФЕКТОМ | 2018 |
|
RU2687533C1 |
| ЭКРАНОПЛАН "САМОЛЕТНОЙ" СХЕМЫ | 2007 |
|
RU2368521C2 |
| ЦЕНТРОБЕЖНЫЙ ДВИЖИТЕЛЬ | 2012 |
|
RU2500922C2 |
| САМОСТАБИЛИЗИРУЮЩИЙСЯ ЭКРАНОПЛАН | 2007 |
|
RU2368522C2 |
| АТОМНЫЙ АВИАНЕСУЩИЙ ЭКРАНОПЛАН (ААЭП) И ЕГО КОМБИНИРОВАННЫЕ БИНАРНЫЕ ЦИКЛЫ ПРОПУЛЬСИВНОГО НАЗНАЧЕНИЯ С ЯДЕРНЫМИ РЕАКТОРАМИ | 2021 |
|
RU2817686C1 |
| ВЫСОКОСКОРОСТНОЕ СУДНО-ЭКРАНОПЛАН С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (ВАРИАНТЫ) | 2018 |
|
RU2681784C1 |
| ЭКРАНОПЛАН "RUSWIND" (ВАРИАНТЫ) | 1997 |
|
RU2140370C1 |
| ЦЕНТРОБЕЖНОЕ ТЯГОВОЕ УСТРОЙСТВО | 2011 |
|
RU2455525C1 |
| СПОСОБ КОМПЛЕКСНОГО ПОВЫШЕНИЯ АЭРОДИНАМИЧЕСКИХ И ТРАНСПОРТНЫХ ХАРАКТЕРИСТИК, ЭКРАНОПЛАН ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ПОЛЕТА | 2010 |
|
RU2539443C2 |
Изобретение относится к транспортным средствам на динамической воздушной подушке и касается экранопланов для перемещения над поверхностью воды. Экраноплан содержит один водометный движитель, крыло, фюзеляж с кабиной и грузовым отсеком, вертикальный и горизонтальный стабилизаторы. При этом водометный движитель расположен в хвостовой части фюзеляжа и выполнен с полнонапорным водозаборником, постоянно смоченная вертикальная часть которого является вертикальным стабилизатором с установленным на нем вертикальным рулем. На постоянно смоченной части полнонапорного водозаборника установлен горизонтальный стабилизатор с горизонтальными рулями. Горизонтальный стабилизатор установлен с отрицательным углом атаки. Достигается обеспечение высокой продольной и путевой статической устойчивости, более эффективное продольное и путевое управление на всех режимах движения. 3 з.п. ф-лы, 4 ил.
1. Экраноплан с водометным движителем, содержащий, по меньшей мере, один водометный движитель, крыло, фюзеляж с кабиной для размещения в ней пилотов и грузовым отсеком, вертикальный и горизонтальный стабилизаторы, отличающийся тем, что, по меньшей мере, один из водометных движителей расположен в хвостовой части фюзеляжа и выполнен с полнонапорным водозаборником, постоянно смоченная вертикальная часть которого является вертикальным стабилизатором с установленным на нем вертикальным рулем, и на постоянно смоченной части полнонапорного водозаборника установлен горизонтальный стабилизатор с горизонтальными рулями, при этом центр масс всего экраноплана с водометным движителем находится впереди общего центра давления крыла с фюзеляжем, а горизонтальный стабилизатор установлен с отрицательным углом атаки и обеспечивает продольное равновесие.
2. Экраноплан по п.1, отличающийся тем, что у водометных движителей с полнонапорным водозаборником, расположенных в хвостовой части фюзеляжа, площадь сечения водовода у лопастного механизма больше площади сечения водовода у приемного отверстия водометного движителя.
3. Экраноплан по п.1, отличающийся тем, что две половины горизонтального стабилизатора имеют отрицательный угол поперечного V.
4. Экраноплан по п.1, отличающийся тем, что у выходных сечений сопел водометных движителей имеются рули или реверсивно-рулевые устройства.
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ УРОВНЯ РАБОЧЕЙ ЖИДКОСТИ В КАРТЕРЕ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2006 |
|
RU2323354C1 |
| US 3968762 A, 13.07.1976 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО НА АЭРОДИНАМИЧЕСКОЙ ПОДУШКЕ | 2003 |
|
RU2266836C2 |
| US 5018686 A, 28.05.1991 | |||
| US 6164401 A, 26.12.2000. | |||

