Изобретение относится к космической технике и может быть использовано для закрепления и расфиксации подвижных элементов конструкции (ПЭК) (контейнеров научной аппаратуры, антенных устройств и т.д.), которые в процессе транспортирования и работы не допускают воздействия внешних ударных импульсов.
Известно подъемно-мачтовое устройство (патент RU №2373618 - прототип) с обеспечением быстрого развертывания-свертывания антенны, в котором при помощи телескопической мачты антенна может выдвигаться в рабочее положение, фиксироваться, расфиксироваться и переходить в свернутое положение.
Известная конструкция развертывания и свертывания антенны имеет ограниченные эксплуатационные возможности из-за сложности выдвижной телескопической мачты, включающей большое количество конструктивных элементов (карданный подвес, рычажный привод, винтовой привод и т.д.), что неприемлемо в космической технике из-за весовых характеристик.
Использование в конструкции дисковой кулачковой муфты, обеспечивающей в процессе выдвижения мачты разрыв кинематической связи с рычажным приводом, а в процессе свертывания мачты ее восстановление, значительно снижает надежность устройства, так как из-за угловых люфтов, присутствующих в любых кинематических связях, ввести в зацепление кулачковую муфту проблематично.
Задачей технического решения является расширение эксплуатационных возможностей устройства с обеспечением простоты и надежности разворота и фиксации гермоконтейнера научной аппаратуры.
Устройство разворота и фиксации гермоконтейнера научной аппаратуры, установленное на КА, содержащее подвижную раму, установленную на основании, имеющую опорную площадку для гермоконтейнера научной аппаратуры, привод разворота подвижной рамы, отличающееся тем, что привод разворота подвижной рамы кинематически, посредством зубчатого колеса, связан с дублирующим приводом и оба они установлены неподвижно на основании, ось зубчатого колеса также установлена на основании и жестко связана с кривошипом, который шарнирно взаимодействует с подпружиненной тягой, другой конец которой шарнирно связан с зубчатым сектором, шарнирно закрепленным на основании, и кинематически посредством шестерни, шарнирно закрепленной также на основании, связан с осью вращения подвижной рамы, закрепленной на основании, при этом гермоконтейнер имеет сферические упоры, установленные симметрично его продольной оси и взаимодействующие с ответными контактными поверхностями, закрепленными на корпусе КА в исходном положении, а подвижная рама снабжена упорами, контактная поверхность одного из них выполнена плоской, другая - зубчатой, взаимодействующими в рабочем положении гермоконтейнера с соответствующими опорными поверхностями кронштейнов, жестко установленными на КА.
Конструктивное решение предполагаемого изобретения приведено на чертежах:
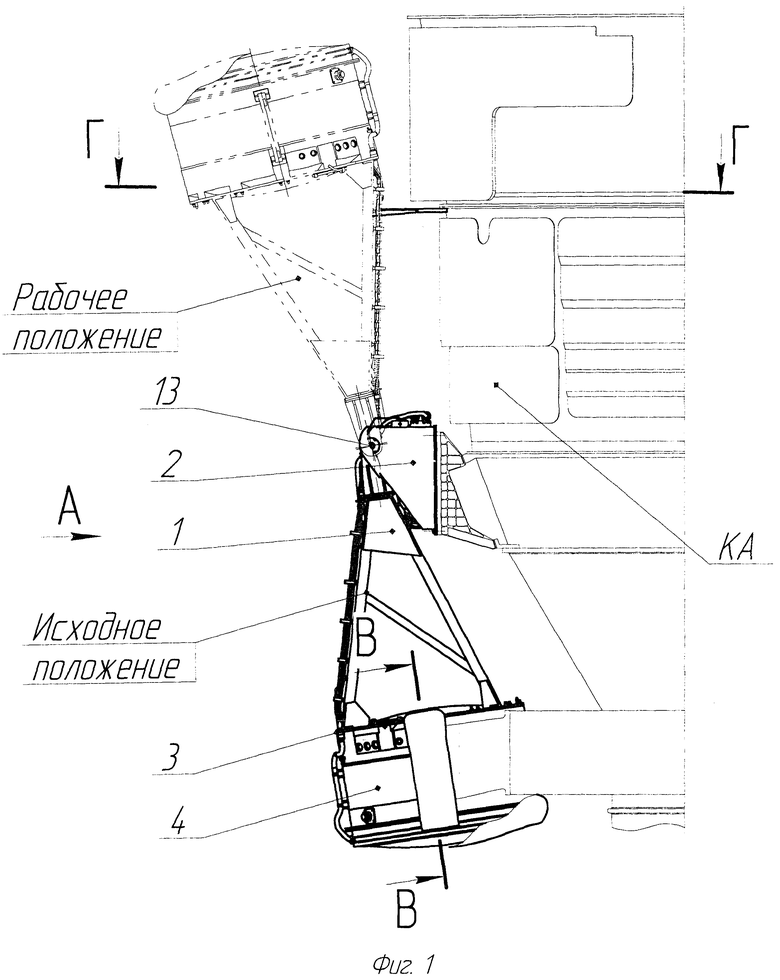
Фиг.1 - общий вид УРФГ в транспортном и рабочем положениях;
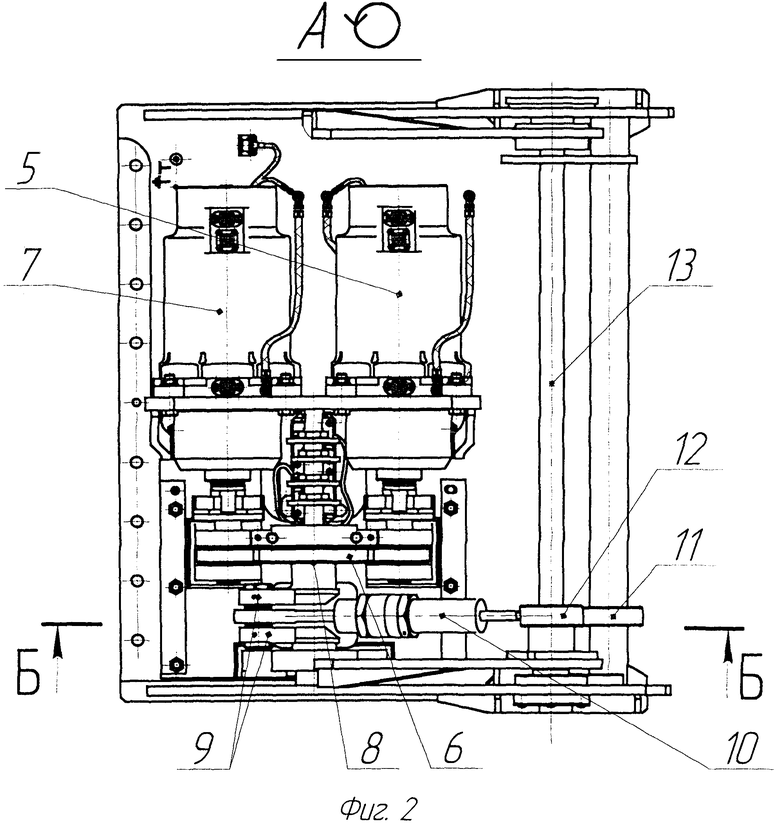
Фиг.2 - вид А с фиг.1;
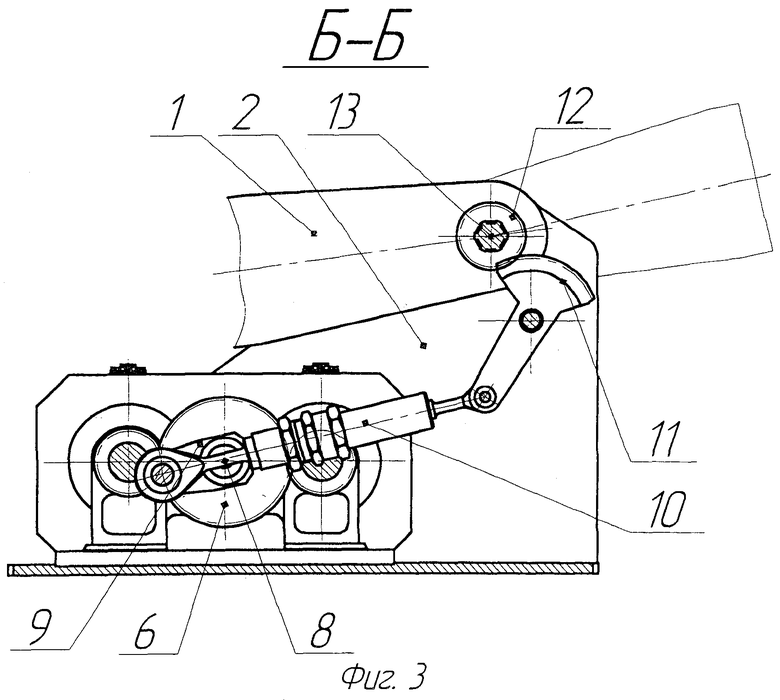
Фиг.3 - разрез Б-Б с фиг.2;
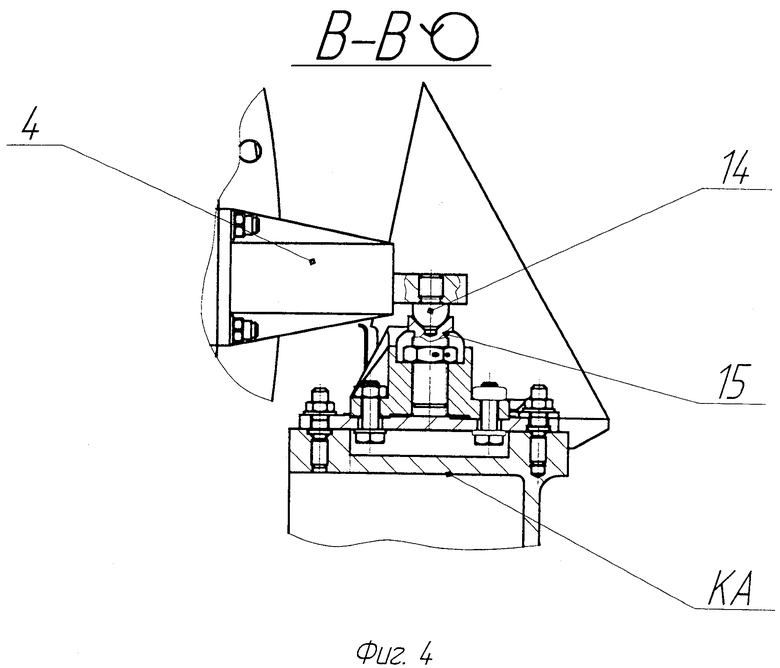
Фиг.4 - разрез В-В с фиг.1;
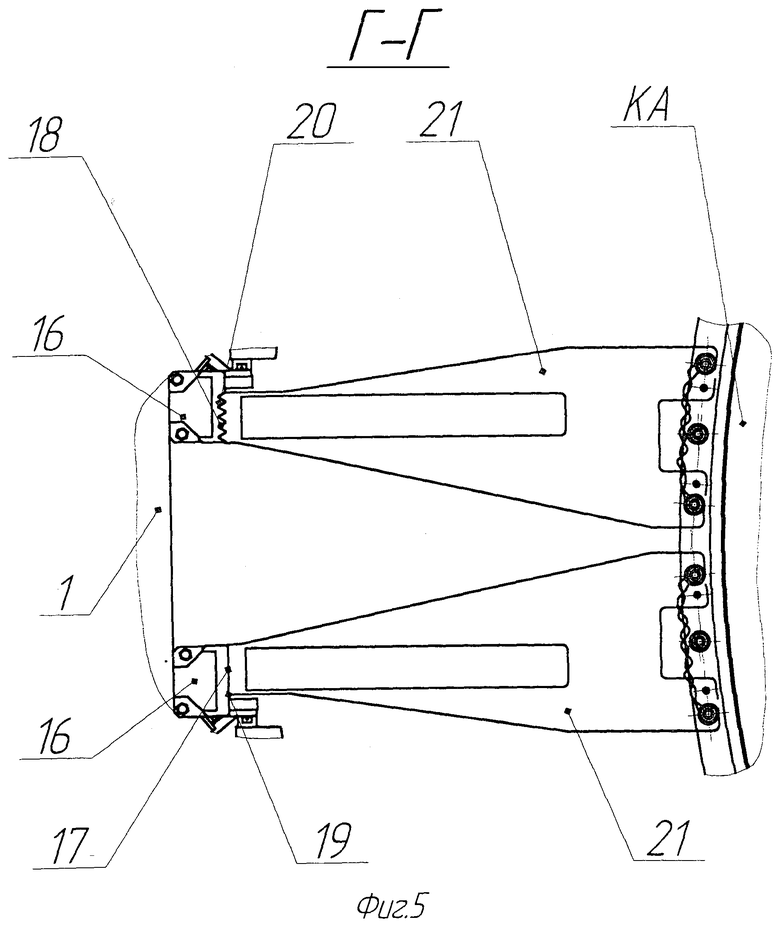
Фиг.5 - разрез Г-Г с фиг.1.
Конструкция УРФГ НА состоит из подвижной рамы 1, установленной на основании 2 и имеющую опорную площадку 3 для установки гермоконтейнера научной аппаратуры (ГК НА) 4, привода 5 разворота подвижной рамы 1, который кинематически посредством зубчатого колеса 6 связан с дублирующим приводом 7, и оба они установлены неподвижно на основании 2, ось 8 зубчатого колеса 6 также установлена на основании 2 и жестко связана с кривошипом 9, который шарнирно связан с подпружиненной тягой 10, другой конец которой шарнирно связан с зубчатым сектором 11, который шарнирно закреплен на основании и кинематически посредством шестерни 12, шарнирно закрепленной на основании 2, связан с осью вращения 13 подвижной рамы 1, закрепленной на основании 2, при этом гермоконтейнер научной аппаратуры 4 имеет сферические упоры 14, установленные симметрично его продольной оси и взаимодействующие с ответными контактными поверхностями 15 (например, коническими), закрепленными на корпусе КА в исходном положении, а подвижная рама 1 снабжена упорами 16, контактная поверхность одного из них выполнена плоской 17, другая - зубчатой 18, взаимодействующими в рабочем положении гермоконтейнера научной аппаратуры 4 с соответствующими опорными поверхностями 19 и 20 кронштейнов 21, жестко установленными на КА.
В исходном положении ГК НА уложен вдоль КА, сферические упоры 14 ГК НА 4 входят в контактные поверхности 15 (конические) КА. Кривошип 9 не доходит до мертвой точки на угол 2°, подпружиненная тяга 10 растянута и с заданным усилием прижимает сферические упоры 14 ГК НА к контактным поверхностям 15 КА, которые, в свою очередь, за счет формы своих контактных поверхностей «сфера-конус» удерживают подвижную раму 1 с ГК НА 4 в исходном положении от внешних возмущающих факторов на участке выведения КА.
Отвод ГК НА 4 в рабочее положение производится в следующей последовательности. В соответствии с программой работы КА подается команда на включение приводов 5 (разворота подвижной рамы) и 7 (дублирующего), закрепленных в основании 2. Зубчатое колесо 6 с кривошипом 9 начинает вращаться. Направление вращения кривошипа 9 в сторону «мертвой» точки. После прохождения кривошипом 9 «мертвой» точки усилие, развиваемое подпружиненной тягой 10, уменьшается и при повороте кривошипа 9 на угол 5°, после «мертвой» точки, становится равным нулю. В этот момент подпружиненная тяга 10 как жесткий элемент передает усилие на шарнирно связанный с ней зубчатый сектор 11, который, в свою очередь, передает крутящий момент на ось 13 подвижной рамы 1 через шестерню 12. Начинается движение подвижной рамы 1 с ГК НА 4. При достижении подвижной рамы 1 с ГК НА 4 рабочего положения подвижная рама 1 контактными поверхностями 17(плоская) и 18 (зубчатая) своих упоров 16 касается опорных поверхностей 19 и 20 кронштейнов 21 КА. В этом положении кривошип 9 с шестерней 12 повернулся на угол, не доходя до противоположной «мертвой» точки на 5°. Срабатывают телеметрические датчики (на чертеже не показаны), сигнализируя о том, что ГК НА 4 коснулся упоров рабочего положения. Продолжая вращаться, кривошип 9 начинает сжимать штоки подпружиненной тяги 10, обеспечивая необходимое усилие прижатия подвижной рамы 1 с ГК НА 4 к опорным поверхностям КА. Контактная поверхность 17 (плоская) упора 16 позволяет подвижной раме 1 компенсировать возможные температурные деформации в контакте с опорной поверхностью 19 кронштейна 21 КА, а контактная поверхность 18 (зубчатая) упора 16 удерживает подвижную раму 1 в поперечном направлении от внешних возмущающих воздействий. Усилие, развиваемое подпружиненной тягой 10, гарантированно прижимает подвижную раму 1 с ГК НА 4 к опорам КА. При повороте кривошипа 9 в положение, не доходя 2° до «мертвой» точки, срабатывают датчики управления, выдающие команду на выключение приводов 5 (разворота подвижной рамы) и 7 (дублирующего).
При необходимости коррекции орбиты КА гермоконтейнер НА переводится в исходное положение. Операции по переводу гермоконтейнера НА в исходное положение проводятся в обратной последовательности.
Использование предложенного технического решения позволяет расширить эксплуатационные возможности устройства с обеспечением надежности разворота и фиксации гермоконтейнера научной аппаратуры за счет исключения из его состава сложных и ненадежных элементов конструкции, таких как телескопическая штанга, рычажный и винтовой приводы, муфты, разрывающие и восстанавливающие кинематическую связь в процессе работы, а также за счет введения в конструкцию УРФГ НА кривошипно-рычажного механизма совместно с подпружиненной тягой позволяет обеспечить надежное прижатие гермоконтейнера научной аппаратуры к упорам в уложенном и рабочем положениях. Введение в конструкцию УРФГ НА параллельно приводу разворота рамы дублирующего привода дало возможность качественно повысить надежность механической системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФИКСАЦИИ ГЕРМОКОНТЕЙНЕРА НАУЧНОЙ АППАРАТУРЫ | 2013 |
|
RU2538649C1 |
| УСТРОЙСТВО КРЕПЛЕНИЯ И РАСФИКСАЦИИ ПОДВИЖНЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИИ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2422334C1 |
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ (ВАРИАНТЫ), ПРОДОЛЬНО-МНОГОРЯДНЫЙ МАГАЗИН, КОМПЕНСАЦИОННОЕ УСТРОЙСТВО ОТПИРАНИЯ КАНАЛА СТВОЛА, КРИВОШИПНО-ПОЛЗУННОЕ ЗАПИРАЮЩЕЕ УСТРОЙСТВО, УСТРОЙСТВО БАЛАНСИРОВКИ МАСС ПОДВИЖНЫХ ЧАСТЕЙ И КОМПЕНСАЦИОННЫЙ СПОСОБ ОТПИРАНИЯ КАНАЛА СТВОЛА | 1998 |
|
RU2144171C1 |
| БАТАРЕЯ СОЛНЕЧНАЯ КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2460676C2 |
| МЕХАНИЗМ СВОБОДНОГО РАСЦЕПЛЕНИЯ АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 1999 |
|
RU2167464C1 |
| УСТРОЙСТВО РАСКРЫТИЯ ПЛОСКИХ КРУПНОГАБАРИТНЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2554901C2 |
| УЗЕЛ КРЫШКИ СВЕТОЗАЩИТНОГО УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2744049C1 |
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Стенд для проверки углов установки управляемых колес транспортного средства | 1981 |
|
SU1000825A1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ ОБРАЗЦА МАТЕРИАЛА НА УСТАЛОСТЬ | 1991 |
|
RU2029282C1 |
Изобретение относится к космической технике и может быть использовано для разворота и фиксации оборудования, размещенного на КА. Устройство разворота и фиксации гермоконтейнера научной аппаратуры содержит подвижную раму с упорами, основание с опорной площадкой для гермоконтейнера, привод разворота подвижной рамы, дублирующий привод, зубчатое колесо, кривошип, подпружиненную тягу, шестерню, гермоконтейнер со сферическими опорами, кронштейны, зубчатый сектор. Изобретение позволяет увеличить надежность разворота и фиксации оборудования, размещенного на КА. 5 ил.
Устройство разворота и фиксации гермоконтейнера научной аппаратуры, установленное на КА, содержащее подвижную раму, установленную на основании, имеющую опорную площадку для гермоконтейнера научной аппаратуры, привод разворота подвижной рамы, отличающееся тем, что привод разворота подвижной рамы кинематически, посредством зубчатого колеса, связан с дублирующим приводом и оба они установлены неподвижно на основании, ось зубчатого колеса также установлена на основании и жестко связана с кривошипом, который шарнирно взаимодействует с подпружиненной тягой, другой конец которой шарнирно связан с зубчатым сектором, шарнирно закрепленным на основании, и кинематически посредством шестерни, шарнирно закрепленной также на основании, связан с осью вращения подвижной рамы, закрепленной на основании, при этом гермоконтейнер имеет сферические упоры, установленные симметрично его продольной оси и взаимодействующие с ответными контактными поверхностями, закрепленными на корпусе КА в исходном положении, а подвижная рама снабжена упорами, контактная поверхность одного из них выполнена плоской, другая - зубчатой, взаимодействующими в рабочем положении гермоконтейнера с соответствующими опорными поверхностями кронштейнов, жестко установленными на КА.
| ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ | 2008 |
|
RU2373618C1 |
| ПОДЪЕМНИК | 2000 |
|
RU2196104C2 |
| US 5426444 A1, 20.06.1995 | |||
| DE 4329715 C1, 23.02.1995 | |||

