(54) СТЕНД ДЛЯ ПРОВЕРКИ УГЛОВ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для контроля углов установки управляемых колес транспортных средств | 1980 |
|
SU938065A1 |
| Стенд для испытания одноколейных транспортных средств | 1989 |
|
SU1672264A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| ПНЕВМАТИЧЕСКИЙ ТРАНСПОРТЕР ДЛЯ РАСПРЕДЕЛЕНИЯ ВОЛОКНИСТЫХ МАТЕРИАЛОВ И ДРУГИХ ПРОДУКТОВ ПО ТРУБАМ | 2008 |
|
RU2463237C2 |
| Двухрежимная трансмиссия транспортного средства | 1989 |
|
SU1708669A1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2022 |
|
RU2788226C1 |
| Контроллер управления железнодорожным транспортом и способ его работы | 2023 |
|
RU2808302C1 |
| Стенд для испытания колесных машин | 1983 |
|
SU1250894A1 |
| Стенд для контроля углов установки управляемых колес транспортного средства | 1983 |
|
SU1112256A1 |
| Стенд для испытания гусеничных транспортных средств | 1987 |
|
SU1495664A1 |
1
Изобретение относится к транспортному машиностроению и может быть использовано для контроля углов установки управляемых колес транспортных средств.
Известен стенд для проверки углов установки управляемых колес транспортного средства, содержащий основание, две вертикальные стойки, связанные с основанием и имеющие прорези, в которых установлены измерительные рейки, размещенные в поперечном проеме, выполненном в основании, и подпружиненные относительно вертикальных стоек, механизм блокировки измеритель«ых реек, имеющий фрикционную подкладку, размещенную в прорезях вертикальных стоек под измерительными рейка 1и, пластину, связанную с измерительными рейками, и ограничителями хода пластины, установлеины1ш на основании, датчик относительного перемещения измерительных реек, соединенный с регистрирующей аппаратурой, и механизм возврата измерительных реек в исходное положение, имеющий кроицисйны, прикрепленные к измсрительн1 гм рейкам, захватные рычаги, шарнирно установленные на основании и подпружиненрые относительно него, привод, передачу для кинематической связи привода с захватными рычагами и систему управления приводом 1.
Недостаток известного стенда - невозможность осуществления контроля углов установки при заезде транспортного средства на стенд задним ходом, чТо снижает производительность контроля, так как требует маневрирования транспортного средства при съезде со стенда, установленного в поточную линию диагностики.
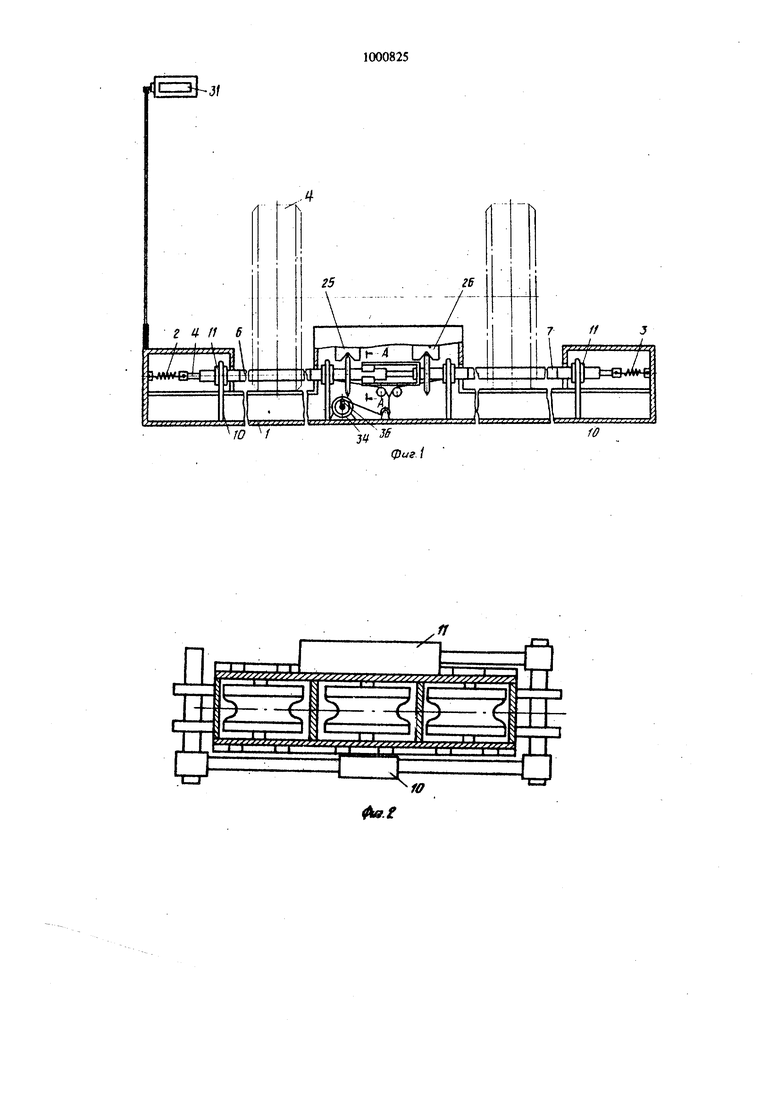
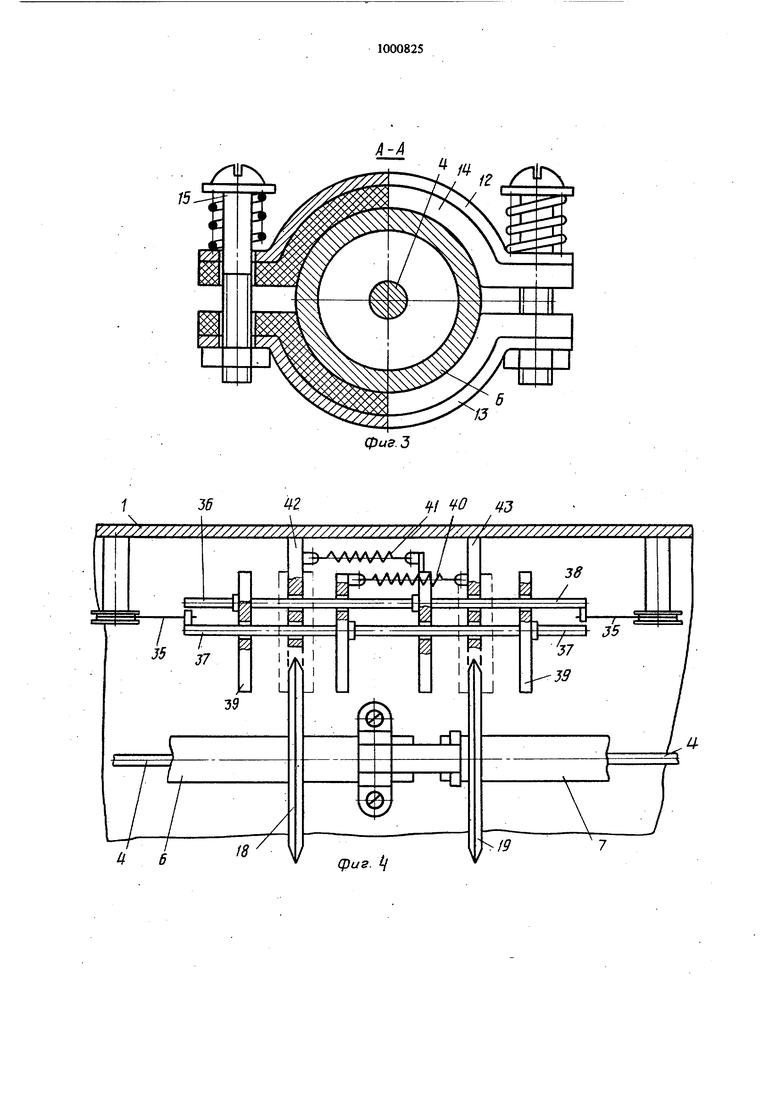
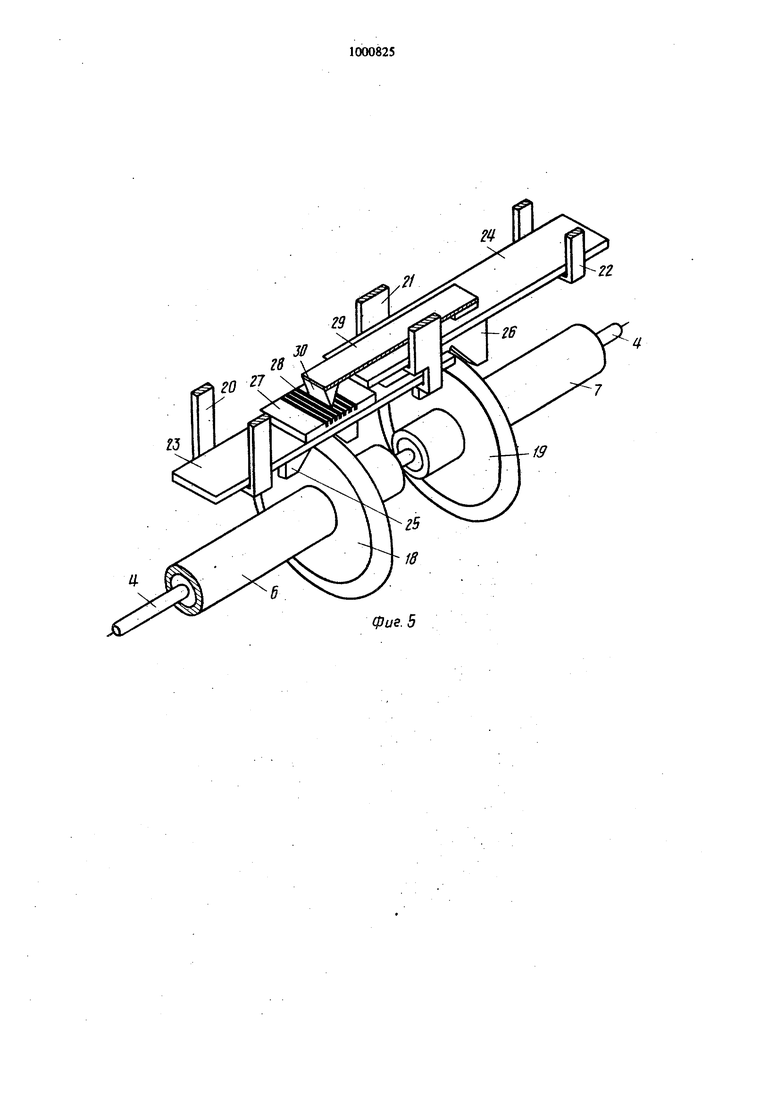
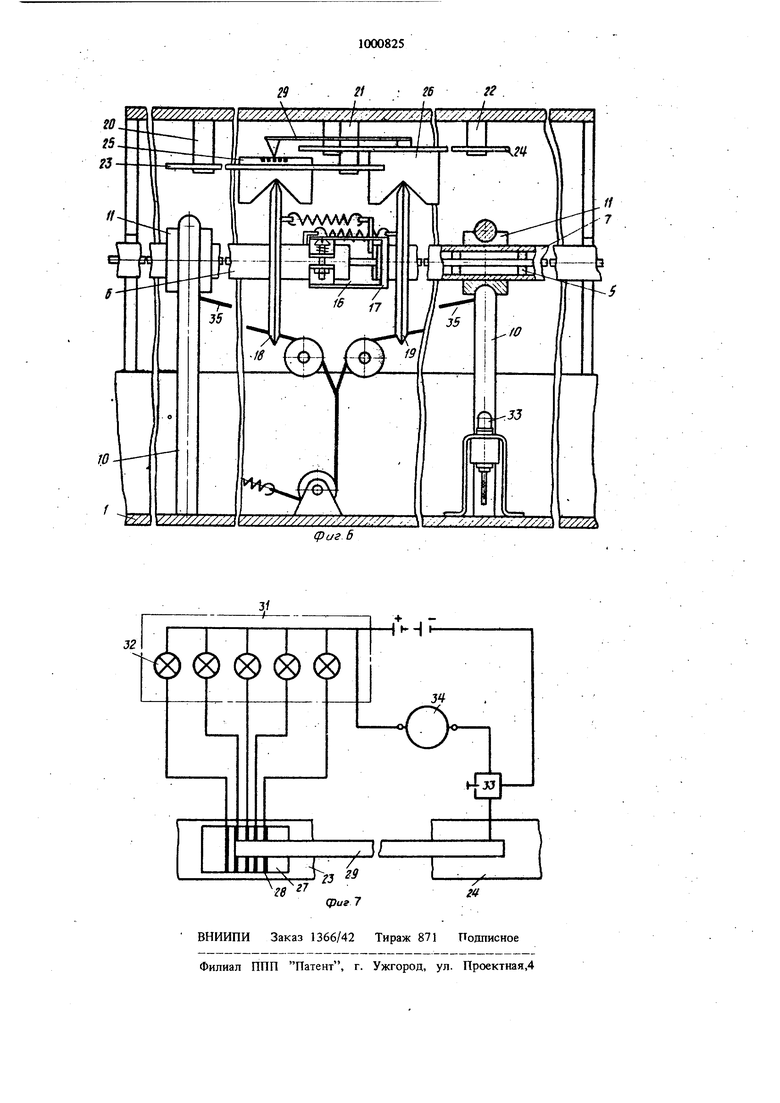
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является стсмд для проверки углов установки управляемых колес транспортного средства, содержащий основание подвижные в поперечном направлении контактные элементы, размещенные в попере «юм проеме, выполненном в основании, и подпружиненные относительно него, ограниттели продольного перемещения контактных элементов, механизм блокировки контактных элементов, датчик перемещения, соединенный передаточным мехавдзмом с контактными эл ментами и подключенный к регистрирующему блоку, и механизм возврата контактных элементов в исходное состояние, имеющий двигатель и приводной механизм, кинематически связанный с двигателем гибкой передачей 2. Недостатком известного стенда является большая металлоемкость, обусловленная сло ностью конструкции, опор для контактных элементов, механизмов- блокировки и возвра та контактных элементов в исходное состоя ние. Цель изобретения - снижение металлоемкости стенда. Указа1шая дель достигается тем, что стенд снабжен гибким звеном, размещенным в rto перечном проеме основания и прикрепленны к нему посредством пружин, при этом кон тактные элементы выполнены в виде роликов, установленных с помощью опор качения на гибком эвене, ограничители продольного перемещения роликов включают вертикальные направляющие, закрепленные на основании, и втулку, шарнирно установленн)ю на каждом ролике с возможностью осе вого перемещения, механизм блокировки состоит из двух пластин с фрикционной прокладкой, охватывающих посредством рег лируемого соединения один из роликови связанных дополнительной пластиной с обоймой, имеющей кольцевой бурт, размещенный в кольцевом пазу, выполненном в ролике, передаточный механизм включает два У-обраэнь1х кронштейна, между стойками которых размещены диски, закрепленные на роликах, а приводной меха низм содержит тяги, соединенные с гибкой передачей и выполненные на основании выступы, и упорные шайбы, закрепленные на тягах и подпружиненные относительно установленных между, ними выступов, причем выступы и диски вьшолнены с равной толщиной. На фиг. 1 изображен стенд, общий вид спереди; на фиг. 2 то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - схема- приводного механизма; на фиг. 5 - датчик перемещения и передаточный механизм, общий вид; на фиг. 6 - механизм блокировки и фиксаторы продоль ного перемещения контактных роликов, общий вид; на фиг. 7 - электрическая схема соединения датчика перемещения с регистрирующей аппаратурой. На основании 1, выполненном в виде ко робчатой балки, с помощью пружин 2 и 3 закреплено гибкое звено (трос) 4, свободно проходящее через опоры 5 качения, запрессованные на внутренних поверхностях контактных роликов 6 и 7. Контактные, ролики 6 и 7 размещены в поперечном проеме 8, вьтолненном в опорной плите 9, жестко соединенной с основанием 1. Ограничители продольного перемещения контактных роликов 6 и 7 состоят из вертикальных направляющих 10, закрепленных на основании 1, и втулок 11, шарнирно установленных на контактных роликах 6 и 7 с возможностью осевого перемещения и размещенных в вертикальных направляющих 10. Механизм блокировки контактных роликов 6 и 7 состоит из двух пластин 12 и 13 с фрикционной прокладкой 14, охватывающих контактный ролик 6 с помощью регулировочных винтов 15. Пластины 12 и 13 Нри помощи дополнительной пластины 16 соединены с обоймой 17, имеющей кольцевой бурт (не показан), размещенный в кольцевом пазу (не показан), выполненном в контактном ролике 7. На контактных роликах 6 Н; 7 закреплены диски 18 и 19, взаимодействующие с передаточным механизмом, состоящим из направляющих 20-22, полок 23, 24 и V-обраэных кронппейнов 25 и 26, закрепленных на полках 23 и 24. На, полке 23 закреплена панель 27 с контактдай 28 датчика перемещения, ползун 29 которого закреплен на полке 24. Контак ты 28 и контакт 30 ползуна 29 подключены к регистрирующему блоку 31 с индукторными лампами 32. В электрическую цепь включено реле 33 времени, установленное на основании 1 с возможностью взаимодействия со втулкой 11. Механизм возврата контактных роликов 6 и 7 в исходное состояние содержит двигатель 34, установленный на основании 1, бесконечную гибкую передачу 35, связанную с кривошипом 36 двигателя 34 и с приводным механизмом, состоящим из тяг 37 и 38, соединенных с бесконечной гибкой передачей 35, и упорных шайб 39, закреш1е шых на соответствующих тягах и связанных пружинами 40 и 41 с установленными на основании 1 упорами 42 и 43, ширина которых равна ширине дисков 18 и 19. Для проверки углов установки управляемые колеса транспортного средства проезжают по опорным плитам 9, наезжая на контактные ролики 6 и 7, утапливая их. При этом втулка 11, опускаясь вместе с контактным роликом 7, нажимает на кулачок реле 33 времени, включая регистрирующий блок 31. При неодновременном наезде управляемых колес на контактные ролики 6 и 7 возникает взаимный перекос опорных роликов 6 и 7, в результате которого пластины 12 и 13 с помощью фрикционной прокладки 14 создают силу сопротивления перемещению . контактных роликов 6 и 7, блокируя их от поперечного перемещения относительно друг друга. При одновременном наезде управляемых колес на контактные ролики 6 и 7 пе рекос контактных роликов отсутствует и ме ханизм блокировки не создает сопротивления поперечному перемещению контактных роликов 6 и 7. Поперечное перемещение контактных роликов 6 и 7 под действием боковых сил, обусловленных углами установ ки управляемых колес, с помощью дисков 18, 19 и V-образных кронштейнов 25 и 26 преобразуется в относительное перемещение полок 23 и 24. При этом контакт 30 перемещается по контактам 28, включая соответ ствующую индикаторную лампу 32. После переезда управляемых колес транс портного средства через контактные ролики 6 и 7 реле 33 времени отключает регистрирующий блок 31 и включает двигатель 34. При работе двигателя 34 вращение кривошипа 36 с помощью бесконечной гибкой передачи 35 преобразуется в перемещения тяг 36 и 37 относительно друг друга и соответствующее перемещение упорных щайб 39, закрепленных на ;ягах 36 и 37. В процессе движения упорные шайбы 39, взаимодействующие с дисками 18 и 19, перемещают контактные ролики 6 и 7. Перемещение контактных роликов 6 и 7 происходит до тех пор, пока упорные шайбы 39 не подойдут вплотную с обеих сторон к упорам 42 и 43. При этом контактные роли ки 6 и 7 перемещены в исходное положение и стенд готов для проверки углов уста новки управляемых колес следующего транспортного средства. Благодаря упрощению конструкции опор для установки контактных роликов, приводного и передаточного механизмов снижается металлоемкость предлагаемого стенда. Формула изобретения Стенд для проверки углов установки управляемых колес транспортного средства, содержащий основание, подвижные в поперечном направлении контактные злементы, размещенные в поперечном проеме, вьшолненном в основании, и подпружиненные относительно него ,: ограничители продольного перемещения контактных элементов, механизм блокировки контактных элементов, датчик перемещения, соединенный передаточным механизмом с контактными элементами и подключенный к регистрирующему блоку, и механизм возврата контактных элементов в исходное состояние, имеющий двигатель и приводной механизм, кинематически связанный с двигателем гибкой передачей, о тличающийся тем, что, с целью снижения металлоемкости, он снабжен гибким звеном, размешенным в поперечном проеме основания и прикрепленным к нему посредством проушин, при этом контактные элементы вьшолнены в виде роликов, установленных с помощью опор каче1шя на гибком звене, ограничители продольног nept мещения роликов включают вертикальные направляющие, закрепленные на основании, и втулку, щарнирно установленную на каждом ролике с возможностью осевого перемещения, механизм блокировки состоит из двух пластин с фрикционной прокладкой, охватывающих посредств:ом регулируемого соединения один из роликов и связанных дополнительной пластиной с обоймой, имеющей кольцевой бурт, размещенный в кольцевом пазу, выполненном в другом ролике, передаточньп1 механизм включает два V-образных кронштейна, между стойками которых размещены диски, закрепленные, на роликах, а приводной механизм содержит тяги, соединенные с гибкой передачей и. выполненные на основании обоймы, и упорные щайбы, закрепленные на тягах и подпружиненные относительно установленных между ними выступов, причем выступы и диски вьшолнены с равной толщиной. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 735951, кл. G 01 М 17/06, 1977. 2.Авторское свидетельство СССР по заявке № 3220435/11, кл. G 01 М 17/06, 1980. фиг. ij 1 0 / J 3 А IS гг
