Изобретение относится к дистанционному радиоуправлению машиной, содержащей, по меньшей мере, один управляемый им привод подвижной части машины, включающему в себя приемное устройство машины, пульт с блоком управления, передающим устройством и, по меньшей мере, одним датчиком движения, причем блок управления передает введенные пользователем управляющие команды на передающее устройство, а передающее устройство передает их на приемное устройство, причем посредством датчика движения регистрируются движения пульта в пространстве вокруг, по меньшей мере, одной оси наклона (KA, DA) таким образом, что в режиме движения зарегистрированные движения преобразуются блоком управления в управляющие команды, передаваемые на машину посредством радиопередачи между передающим и приемным устройствами, причем режим движения активируется за счет ввода пользователем на пульте.
Особенно предпочтительной, хотя и не исключительной, областью применения изобретения является управление кранами и подъемными механизмами. В случае стрелового крана, например строительного крана, можно с помощью соответственно выполненного согласно изобретению дистанционного радиоуправления управлять, например, ориентацией стрелы (угол вращения), движением крановой тележки и крюка.
Управление аппаратами посредством датчиков положения в дистанционном управлении или аналогичном дистанционному управлению элементе известно. Следует указать, например, на игровые консоли и т.п. Датчики положения встраиваются в настоящее время, например, также в мобильные телефоны, так что можно определить ориентацию такого аппарата, в частности его дисплея, чтобы согласовать изображение на дисплее с ориентацией аппарата.
Для оптимального использования дистанционного радиоуправления машиной требуется, чтобы можно было точно регистрировать движения пульта в пространстве. Далее следует обратить внимание на то, чтобы дистанционное радиоуправление посредством пульта обеспечивало интуитивное для пользователя управление машиной, в частности, если пользователь должен управлять ею посредством движения пульта.
Задачей изобретения является усовершенствование родового дистанционного радиоуправления в отношении интуитивного обслуживания машины пользователем.
Согласно первому аспекту изобретения предложено, что блок управления выполнен таким образом, что при активировании режима движения текущее положение пульта в пространстве регистрируется в качестве текущего базового положения, в результате чего движения относительно этого текущего базового положения регистрируются датчиком движения и передаются блоком управления на машину в виде управляющих команд.
При таком выполнении блока управления можно определить текущее базовое положение в удобном для пользователя положении руки. Пульт дистанционного радиоуправления удерживается часто не точно горизонтально, а естественное положение руки человека приводит к тому, что он удерживается с легким наклоном вверх. Это естественное положение может быть тогда установлено в качестве текущего базового положения или в качестве подобия нейтрального положения, так что движения пульта, такие как вращение или наклон, могут регистрироваться датчиком движения и преобразовываться в управляющие команды. На основе этого естественного положения руки человека происходит также оптимальное использование возможных движений пользователем с целью управления соответствующим приводом машины.
Согласно второму аспекту изобретения предложено, что дистанционное радиоуправление выполнено таким образом, что при активировании режима движения текущее положение пульта в пространстве регистрируется и сравнивается с заданным базовым положением, а зарегистрированные движения передаются на машину в виде управляющих команд только тогда, когда дистанционное радиоуправление, по меньшей мере, приблизительно приведено в заданное базовое положение, причем для формирования управляющих команд регистрируются движения относительно заданного базового положения.
Заданным базовым положением может быть, например, в основном, горизонтальная ориентация пульта в пространстве. Это заданное базовое положение должно достигаться или устанавливаться исходя из положения пульта в пространстве, в котором активируется управление движением. Если пульт приведен в текущее положение или при активировании управления движением уже находится в этом текущем положении, которое приблизительно соответствует заданному базовому положению, т.е. это заданное базовое положение лежит в пределах диапазона допусков, то тогда исходя из заданного базового положения другие движения пульта регистрируются и преобразуются в управляющие команды, которые могут передаваться на машину.
Оба названных аспекта изобретения обеспечивают интуитивное обслуживание и управление машиной посредством пульта, который содержит датчики движения, а его блок управления обеспечивает передачу на машину зарегистрированных движений в виде управляющей команды.
В этом отношении следует указать на две разные возможности режима управления, которые могут быть реализованы в соответствующих вариантах выполнения дистанционного радиоуправления. В первом режиме управления активирование режима движения происходит нажатием выключателя. За счет этого преимущественно разблокируется, возможно, имеющееся, важное для безопасности реле и т.п. машины, после чего следует привязка пульта в соответствии с одной из названных возможностей привязки. За счет движения пульта относительно базового положения могут формироваться управляющие команды, которые вынуждают также часть машины двигаться в соответственно противоположных направлениях. За счет амплитуды движения пульта относительно базового положения можно тогда задавать также величину управляемого движения, т.е., например, величину скорости или ускорения. Примером этого служит то, что за счет наклона пульта относительно зарегистрированного при включении режима движения базового положения, например на ±30°, задаются направление и величина управляемого движения части машины, причем плюсовой диапазон представляет собой одно направление движения, а минусовой - противоположное направление движения части машины.
Во втором режиме управления предусмотрены, например, два контакта или две кнопки, которые следует привести в действие для активирования режима движения, причем одна из кнопок отвечает за одно направление движения части машины, а другая за его противоположное направление. Движение пульта относительно соответствующего базового положения задавало бы тогда, например, только величину управляемой скорости части машины.
Для ввода пользователем на пульте могут быть предусмотрены, например, кнопочные выключатели. Так, согласно одному варианту осуществления изобретения для управления движением части машины режим движения активируется нажатием выключателя на пульте и поддерживается за счет удержания выключателя. Отпускание выключателя приводит к тому, что никакие другие управляющие команды для управления движением части машины не передаются. Следовательно, речь идет при этом о подобии предохранительной схемы.
Согласно другому варианту осуществления изобретения для ввода пользователем на пульте предусмотрены блокирующие выключатели, посредством которых пользователь может активировать режим движения за счет активного процесса переключения такого блокирующего выключателя.
Далее предложено, что дистанционное радиоуправление включает в себя, по меньшей мере, одно соответствующее пульту средство вывода, которое выполнено таким образом, что в качестве реакции на зарегистрированные движения оно формирует воспринимаемый пользователем вывод, в частности оптический, и/или акустический, и/или тактильный сигнал на пульте.
Воспринимаемый пользователем на пульте вывод улучшает интуитивное, дистанционно управляемое обслуживание машины. В частности, акустические и/или тактильные сигналы могут поддерживать пользователя интуитивным образом при обслуживании машины посредством движений пульта. За счет вывода возникает вид обратной связи с пользователем, так что можно оптимизировать интерфейс «человек-машина».
Для этой цели, в частности, предложено выполнение средства вывода таким образом, что воспринимаемый пользователем вывод формируется в зависимости от подаваемых датчиком движения сигналов.
Средство вывода может быть выполнено таким образом, что воспринимаемый пользователем вывод формируется ступенчато в зависимости от определенной силы подаваемых датчиком движения сигналов. За счет этого можно, например, указать отклонение от базового положения, а по достижении определенного относительного положения в пространстве - сформировать дополнительный сигнал, указывающий достижение первой ступени движения или управления. Дополнительный сигнал может выдаваться, например, если достигается предельное значение возможного движения.
В качестве альтернативы средство вывода может быть выполнено таким образом, что воспринимаемый пользователем вывод формируется пропорционально силе подаваемого датчиком движения сигнала. Здесь, в частности, предусмотрено, что, исходя из базового положения, усиливающийся акустический и/или тактильный сигнал представляет возрастающий наклон в одном направлении, так что пользователь на основе этого вывода может узнать и оценить, в каком текущем положении он удерживает пульт относительно зарегистрированного или заданного базового положения.
Воспринимаемый пользователем вывод может формироваться в соответствии с заданной характеристикой в зависимости от силы подаваемого датчиком движения сигнала. Характеристическая кривая может быть оптимизирована в зависимости от вида управления, так что зависимость воспринимаемого пользователем вывода от силы подаваемого датчиком движения сигнала является прямо пропорциональной, т.е. линейной, или дигрессивной, или прогрессивной. В частности, рассматривается также логарифмическая характеристика.
Согласно одному предпочтительному варианту осуществления изобретения воспринимаемый пользователем вывод, по меньшей мере, одним средством вывода происходит дифференцирование, т.е. только тогда, когда изменяется сила подаваемого датчиком движения сигнала. Такой дифференцированный или динамический вывод дает обычно пользователю достаточное субъективное чувство обратной связи дистанционного радиоуправления и сравнительно мало нагружает, в среднем, электропитание пульта, поскольку на фазах постоянной подачи сигналов датчиком движения средство вывода не требуется активировать. Согласно одному варианту осуществления изобретения предусмотрено, что в отношении формирования воспринимаемого пользователем вывода можно переключать между упомянутыми выше режимами, например, между дифференцированным и статически-пропорциональным режимами.
Блок управления выполнен преимущественно таким образом, что движения, зарегистрированные датчиком движения, в рабочем диапазоне вращения или наклона максимум от примерно -45° до +45°, в частности от -30° до +30°, вокруг соответствующей горизонтальной оси вращения или наклона преобразуются в управляющие команды для машины. Такое ограничение преобразуемого в управляющие команды для машины диапазона движений служит, с одной стороны, для эргономичного обращения с пультом, поскольку рукой выполнять движения в большем угловом диапазоне неудобно. Далее такой определенный угловой диапазон может служить также для установления положений пульта, в которых управление движением с его помощью выключается и никакие дальнейшие управляющие команды больше не передаются на машину на основе зарегистрированных движений. Для этого, в частности, предложено, что средство вывода выполнено таким образом, что оно указывает приближение к максимальному движению вращения или наклона и/или на отклонение от рабочего диапазона вращения или наклона посредством соответствующего, воспринимаемого пользователем вывода.
Далее блок управления может быть выполнен таким образом, что при отклонении от рабочего диапазона вращения или наклона временно на основе зарегистрированных движений не могут больше формироваться никакие другие управляющие команды. Однако согласно одному варианту осуществления изобретения важные для безопасности управляющие команды, например команды остановки, могут посылаться с пульта на машину при отклонении от рабочего диапазона вращения или наклона. В этой связи следует указать на то, что отклонение от предпочтительного углового диапазона или диапазона движений сказывается преимущественно только на управлении машиной посредством движения пульта, но не на управлении машиной посредством возможных других элементов управления на нем, таких как кнопки, джойстик и т.п. Кроме того, следует указать на то, что при отклонении от рабочего диапазона вращения или наклона в системе управления машины определяется, остается ли тогда машина в своем текущем состоянии или приводится в нейтральное положение. Кроме того, следует определить, должны ли быть остановлены движения всех управляемых частей машины в случае отклонения от рабочего диапазона вращения или наклона или останавливаются ли только явно управляемые приводы. Такие концепции привода могут быть рассчитаны с учетом соответствующих концепций и норм безопасности.
Согласно одному предпочтительному варианту осуществления изобретения приемное устройство содержит ответный передатчик и предназначено для того, чтобы при приеме управляющих команд активировать ответный передатчик для передачи ответной информации, причем пульт содержит предназначенный для приема ответной информации и связанный с блоком управления ответный приемник. Приемное устройство с ответным передатчиком и передающее устройство пульта с ответным приемником образуют, тем самым, двунаправленную систему дистанционного радиоуправления с улучшенными признаками безопасности. Преимущественно пульт содержит управляемое блоком управления акустическое, и/или оптическое, и/или тактильное индикаторное устройство, посредством которого отображается информация о рабочих функциях дистанционного радиоуправления по мере приема ответных сигналов от ответного передатчика. Такое индикаторное устройство представляет собой, тем самым, средство вывода, которое может информировать пользователя о неполадках. Аспекту радиоответа, в частности в комбинации с упомянутым индикаторным устройством и признаками ограничительной части пункта 1 формулы изобретения, при необходимости, придается самостоятельное изобретательское значение, и заявитель оставляет за собой право составления соответствующего самостоятельного пункта формулы изобретения.
Другой предпочтительный и в комбинации с признаками ограничительной части пункта 1 формулы изобретения также, при необходимости, самостоятельный аспект изобретения касается того, что на машине предусмотрены сенсорное устройство, регистрирующее данные о соответствующем фактическом положении подвижной части машины и/или состоянии ее движения, и ответный передатчик, посылающий данные этого сенсорного устройства в качестве ответной информации, и что пульт содержит связанный с блоком управления ответный приемник. Преимущественно пульт содержит для этого управляемое блоком управления акустическое, и/или оптическое, и/или тактильное индикаторное устройство, которое отображает соответствующее фактическое положение и/или текущее отклонение фактического положения от определяемого положением пульта в данный момент заданного положения и/или скорость движения подвижной части машины. Это индикаторное устройство может поэтому информировать пользователя о соответствующем положении, направлении и скорости движения части машины. Преимущественно индикаторное устройство включает в себя дисплей, например ЖК-дисплей, на котором информация отображается графически (изображения или пиктограммы или видео) и/или в цифровом виде (цифры и буквы).
На основе зарегистрированных, таким образом, фактических значений заданное базовое положение в варианте дистанционного радиоуправления по пункту 2 формулы изобретения можно определить, например, при каждом включении управления соответственно в текущем виде в зависимости от положения подвижной части машины в данный момент. В таком варианте пульт сначала запрашивает ответную информацию у ответного передатчика на машине, прежде чем он пошлет новые управляющие команды.
Далее, согласно одному варианту дистанционного радиоуправления предусмотрено, что блок управления предназначен для модификации управляющих команд для машины в зависимости от принятой ответной информации. Примером может быть то, что при приближении подвижной части машины к своему заданному положению происходит снижение ее скорости и/или большее разрешение управляющей характеристики в смысле более чувствительного управления.
В рамках изобретения могут быть предусмотрены и другие опции ответов у дистанционного радиоуправления и оборудованной им машины, например индикация определенных реакций машины или определенных динамических состояний движения машины или ее подвижной части, которые обусловлены, например, управляющими или коммутационными операциями из иного источника управления, нежели дистанционного радиоуправления. Так, например, можно управлять машиной, подвижная часть которой движется между двумя противоположными конечными положениями, а концевой выключатель выключает привод машины, как только ее подвижная часть достигнет конечного положения или на небольшое расстояние приблизится к нему. Согласно одному варианту осуществления изобретения также приближение подвижной части машины к конечному положению может передаваться с помощью ответного сигнала по радио на пульт и вызвать на нем оптическую, и/или акустическую, и/или тактильную индикацию, которая обращает внимание пользователя на соответствующую ситуацию машины.
Примером такого управляющего ответа является, например, кран или подъемный механизм с так называемым демпфированием раскачки груза, при котором крановая тележка или, при необходимости, стрела автоматически совершает компенсирующие движения, чтобы предотвратить нежелательную раскачку висящего на кране груза. Также такие компенсирующие движения могут через радиоответ от крана к пульту отображаться на нем. При этом для соответствующего информирования пользователя предпочтительна, в частности, тактильная и/или акустическая индикация на пульте.
Изобретение относится также к способу эксплуатации дистанционного радиоуправления машиной, содержащей, по меньшей мере, один управляемый посредством дистанционного радиоуправления привод ее подвижной части, включающему в себя следующие этапы:
- передачу введенных пользователем на пульте дистанционного радиоуправления управляющих команд от передающего устройства пульта на машину, в частности на соответствующее приемное устройство, и
- регистрацию движений пульта в пространстве, по меньшей мере, вокруг одной оси наклона, причем зарегистрированные движения в режиме движения преобразуются в управляющие команды, которые передаются на машину,
- причем режим движения активируется путем ввода пользователем на пульте, причем согласно изобретению предложено, что при активировании режима движения текущее положение пульта в пространстве регистрируется в качестве текущего базового положения, так что движения относительно этого текущего базового положения могут регистрироваться и передаваться на машину в виде управляющих команд.
Другой аспект способа заключается в том, что при активировании режима движения текущее положение пульта в пространстве регистрируется и сравнивается с заданным базовым положением, причем зарегистрированные движения могут передаваться на машину в виде управляющих команд только тогда, когда пульт, по меньшей мере, приблизительно приведен в заданное базовое положение, причем для формирования управляющих команд регистрируются движения относительно заданного базового положения.
Далее предложено, что в качестве реакции на зарегистрированные движения на пульте формируется, по меньшей мере, один воспринимаемый пользователем вывод, в частности оптический, и/или акустический, и/или тактильный сигнал.
Другие признаки в отношении описанного выше дистанционного радиоуправления могут быть реализованы также в рамках предложенного способа эксплуатации. Это касается, в частности, двунаправленных режимов с передачей ответной информации и ее обработкой.
Изобретение описано ниже на примере его осуществления со ссылкой на прилагаемые чертежи и с помощью не ограничивающего его варианта. На чертежах изображено:
- фиг.1: упрощенный схематичный вид пульта дистанционного радиоуправления;
- фиг.2: разные проекции пульта из фиг.1;
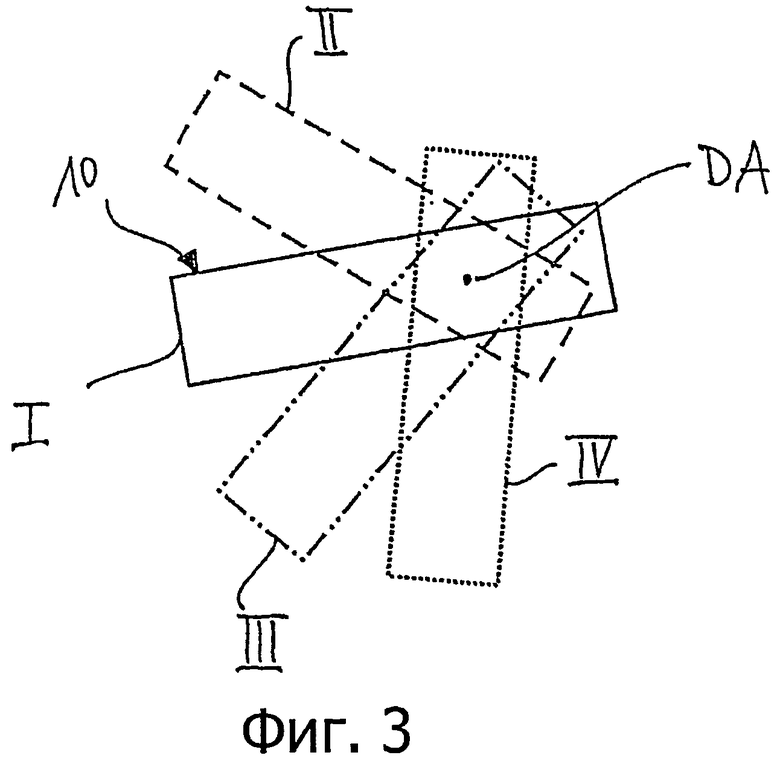
- фиг.3: в сильно упрощенном схематичном виде положения движений пульта в случае первого вида управления;
- фиг.4: разные положения движений пульта в случае второго вида управления;
- фиг.5: блок-схему возможного способа управления.
На фиг.1 изображен сильно упрощенный схематичный перспективный вид пульта 10 дистанционного радиоуправления машиной. Под машиной следует понимать устройства, содержащие подвижные элементы, которые за счет соответствующего управления могут изменять свое положение. В частности, имеется в виду дистанционное управление кранами, стрелами бетононасосов, грузовыми платформами с гидроприводом на грузовых автомобилях и т.п.
В корпусе 12 пульта 10 расположен датчик (не показан), посредством которого можно обнаруживать движения пульта 10 в пространстве. В частности, имеется в виду, что датчик или датчики движения может/могут регистрировать вращательные движения вокруг оси вращения DA и наклонные движения вокруг оси наклона КА. Регистрация движений пульта 10 может осуществляться посредством соответствующей сенсорики угла и положения. Преимущественно используемые датчики положения или движения реагируют на силу тяжести или притяжение Земли и потому располагают зависимым от угла разрешением или максимальной силой сигнала в зависимости от вращательного или наклонного движения пульта. В зависимости от выбранного положения монтажа датчиков положения или движения в корпусе 12 пульта выходной сигнал может быть максимальным при отклонении по горизонтали и все больше стремиться к нулю при вращении или наклоне по вертикали.
Изображенный здесь чисто схематично пульт может содержать тип джойстика 14, который может управляться, как правило, большим пальцем руки пользователя для дистанционного управления соответствующими частями машины. Далее показаны две кнопки 16, 18, на которые нажимают для активирования других возможностей управления. Одна из этих кнопок 16, 18 может использоваться, например, для активирования режима движения, в котором движения, зарегистрированные датчиками движения (не показаны), действительно преобразуются в управляющие команды для управления машиной в зависимости от совершенных движений. С помощью этой кнопки можно по типу триггерной схемы при повторном нажатии также выключать этот режим движения. В качестве альтернативы включение и выключение могут осуществляться разными кнопками. На пульте 10 может быть предусмотрен также аварийный выключатель, который в данном примере не показан. Пульт изображен чисто в качестве примера и в отношении своей внешней формы и дополнительных или других элементов управления может быть выполнен иначе.
Как видно на фиг.2, пульт 10 можно вращать вокруг его оси DA вращения, что обозначено двойной стрелкой. Кроме того, пульт 10 может также наклонять вокруг его оси КА наклона (фиг.2b), что также обозначено двойной стрелкой. Движения вокруг оси DA вращения и оси КА наклона регистрируются датчиком/датчиками движения и в соответственно включенном режиме движения преобразуются в управляющие сигналы, которые передаются на дистанционно управляемую машину.
Согласно одному варианту осуществления изобретения предусмотрено, что наклон пульта вокруг оси DA вращения и оси КА наклона детектируется одновременно и преобразуется блоком управления в управляющие команды. При этом согласно модификации этого варианта может быть предусмотрено, что на выбор одна из этих опций управления временно может отключаться путем соответствующего ввода на пульте 10, в результате чего, например, в результате вращения пульта вокруг оси DA вращения на машину не передаются никакие соответствующие управляющие команды для управления и детектируется и преобразуется только наклон вокруг оси КА наклона. То же относится также к обратному случаю, когда наклон вокруг оси КА наклона пассивно включается в качестве задания управления, так что тогда только вращения вокруг оси DA вращения вызывают управляющие команды для машины. Согласно другому варианту осуществления изобретения выбор этих режимов управления может осуществляться также путем активного включения на пульте 10, например путем нажатия клавишного выключателя. Такие клавишные выключатели могут быть предусмотрены, например, в нижних углублениях 40, 42, 44 для пальцев (фиг.2а). Для выбора соответствующих опций управления могут быть предусмотрены также другие коммутационные элементы, например перекидные, поворотные выключатели и т.д.
В случае крана можно, например, подумать об управлении опусканием или подъемом кранового крюка за счет вращательного движения вокруг оси DA вращения. Наклонное движение вокруг оси КА наклона можно использовать, например, для управления перемещением крановой тележки вдоль стрелы. Разумеется, в зависимости от выполнения крана или дистанционного радиоуправления или соответствующего пульта возможны и другие варианты управления краном.
Даже если на фиг.1 и 2 исходить из того, что вращательные и наклонные движения вокруг перпендикулярных друг другу осей могут регистрироваться, вполне допустимо, что в более простом варианте соответствующая сенсорика может регистрировать только движения вокруг одной из осей DA или КА. В таком случае, например, возможно, что при наклоне пульта 10 вокруг оси КА наклона крана будет вращаться вокруг его оси вращения, а подъем и опускание кранового крюка и перемещение крановой тележки будет происходить за счет приведения в действие джойстика 14.
На фиг.3 в виде схематичных прямоугольников изображены различные положения движений пульта 10 вокруг его оси DA вращения. В первом режиме управления текущее положение I пульта 10 в пространстве можно принять в качестве базового положения. Как видно на фиг.3, это базовое положение I слегка наклонено к горизонтали. Удобно держать такой пульт обычно в угловом диапазоне ±20° вокруг горизонтали. В примере, представленном на фиг.3, при активировании так называемого режима движения, например нажатием кнопки 16 или 18 (фиг.1), регистрируется текущее положение I пульта 10 в пространстве и принимается в качестве базового положения для последующей регистрации движений. Вращательные движения пульта 10 вокруг оси DA вращения в положения II и III могут быть тогда обработаны со ссылкой на базовое положение I и преобразованы в управляющие команды, передаваемые на дистанционно управляемую машину. Положение IV иллюстрирует положение пульта 10, в котором превышен максимальный угол вращения по отношению к базовому положению I. Если пульт 10 привести из базового положения или положения II или III в такое положение IV, то формирование управляющих команд на основе зарегистрированных движений может быть прервано (завершение режима движения). Положение IV может быть достигнуто, например, тогда, когда пользователь, который держит пульт 10 в согнутой руке, выпрямляет ее вниз, в результате чего пульт ориентирован, в основном, вертикально в направлении земли.
На фиг.4а и 4b изображен другой режим управления. Если предположить, что, исходя из положения IV, активируется режим движения, то пульт необходимо привести сначала в положение II или II', которое приблизительно соответствует предварительно настроенному базовому положению I пульта 10. Как только пульт 10 достигнет положения, соответствующего, например, положению II', то зарегистрированные движения пульта снова преобразуются в управляющие команды, которые могут передаваться на машину. Это обозначено на фиг.4b положениями III и IV. Выключение режима движения, так чтобы зарегистрированные движения больше не преобразовывались в управляющие команды, может осуществляться нажатием кнопки 16, 18 па пульте 10 или, как описано выше со ссылкой на фиг.3, за счет отклонения от установленного углового диапазона и приведения пульта, например, в положение IV.
На фиг.5 изображена упрощенная блок-схема режима управления, представленная на фиг.3, при котором текущее положение в пространстве определяется в качестве базового положения. На первом этапе 20 посредством блока управления, размещенного в корпусе 12 пульта 10, регистрируется, включен ли режим движения, например нажатием кнопок 16, 18. После включения режима движения, служащего для преобразования зарегистрированных движений в управляющие команды и их передачи на машину, текущее положение (I на фиг.3) пульта в пространстве определяется в качестве базового положения (этап 22). Затем на этапе 24 регистрируется текущее положение, приводимое в соотношение с базовым положением I. На этапе 26 осуществляется запрос того, выключен ли режим движения. Если не выключен (N), то на этапе 28 проверяется, произошло ли движение пульта в пределах заданного диапазона вращения/наклона. При отклонении от диапазона вращения/наклона (N) режим движения на этапе 34 выключается, и, при необходимости, на пульте 10 формируется воспринимаемый пользователем сигнал. Если на этапе 28 движение осуществляется в пределах диапазона вращения/наклона (J), то на этапе 30 формируется вычисленная в зависимости от зарегистрированного движения управляющая команда, которая передается на дистанционно управляемую машину или ее приводимый в действие компонент. При включенном режиме движения этапы 24-30 осуществляются, как правило, многократно и последовательно для регистрации непрерывно изменяющихся положений движения пульта 10 и формирования соответствующих управляющих команд. Этот цикл обозначен стрелкой 31.
Предпочтительно пульт включает в себя также средство вывода (не показано), которое выполнено таким образом, что в качестве реакции на зарегистрированные движения оно формирует, по меньшей мере, один воспринимаемый пользователем вывод, в частности оптический, и/или акустический, и/или тактильный сигнал на пульте. Это происходит, например, на этапе 32. Этот этап 32 расширяет многократно осуществляемый цикл из этапов 24-32, что обозначено штриховыми стрелками 33 в обход стрелки 31. За счет формирования воспринимаемого пользователем сигнала можно во время создающего угловое отклонение вращательного или наклонного движения пульта 10 и формированной этим управляющей команды подать пользователю слышимый, или осязаемый, или визуально воспринимаемый ответ, дающий пользователю субъективное чувство надежности управления, которое известно ему, например, при дистанционном управлении посредством джойстика или клавиш и т.п. и к которому он привык. Формирование воспринимаемого пользователем сигнала может указываться, например, при отклонении базового положения и при достижении первой ступени, которая соответствует, например, скорости дистанционно управляемой части машины. Когда эта первая ступень достигнута и происходит дальнейшее вращательное или наклонное движение пульта, может быть достигнута, например, вторая ступень управления скоростью (высокая скорость), что воспринимается пользователем посредством другого, в частности более интенсивного, сигнала. При повторном отклонении от ступени II скорости и возврате к ступени I это может восприниматься пользователем также посредством соответствующего сигнала. Если воспринимаемый пользователем сигнал тактильно и/или акустически выключен, то при дистанционном управлении машиной пользователь может визуально сконцентрироваться на ее дистанционно управляемых компонентах и ему не приходится следить за пультом 10. Движения, выполняемые пользователем с помощью пульта 10, воспринимаются им по типу обратной связи за счет акустических и/или тактильных сигналов, так что он в соответствии с воспринимаемыми сигналами может выполнять пультом 10 другие движения или встречные движения, чтобы осуществлять нужное дистанционное управление машиной.
Помимо упомянутого выше в качестве примера вывода воспринимаемых пользователем сигналов при достижении определенных ступеней такие сигналы могут выдаваться также пропорционально зарегистрированным движениям. Например, возможно, чтобы за счет этого акустически и/или тактильно воспринималось увеличение или уменьшение зарегистрированного угла вращения или наклона, причем вполне возможно, чтобы для увеличения угла выдавался иной сигнал, нежели при его уменьшении. Если пульт неподвижно удерживается в определенном угловом положении, то не происходит никакой подачи соответствующего сигнала, который подается только тогда, когда пульт приводится в движение. В качестве альтернативы возможно, чтобы акустический и/или тактильный сигнал выдавался постоянно во время всего режима движения и был пропорционален зарегистрированному углу вращения или наклона. Так, например, возможно, чтобы пользователь ощущал лишь слабую вибрацию, когда он держит пульт в базовом положении или близко к нему. При вращении или наклоне пульта вибрация усиливается по мере возрастания вращения или наклона, так что пользователь может тактильно ощущать отклонение от базового положения. Разумеется, эта сигнализация может осуществляться также акустически.
При этом пропорциональная подача воспринимаемого пользователем сигнала не ограничена прямо пропорциональной зависимостью между зарегистрированным движением и силой сигнала. Напротив, возможно также логарифмическое распределение сигналов, которое лучше подходит для человеческого восприятия. Как акустический, так и тактильный или вибрационно-технический ответ (воспринимаемый пользователем сигнал) может состоять, например, из виброимпульсов или коротких пакетных цепочек виброимпульсов, промежуток между которыми уменьшался бы с увеличением угла вращения или наклона и тем самым возрастала бы их воспринимаемая интенсивность.
Акустический, и/или тактильный, и/или оптический вывод на пульте может происходить также тогда, когда достигнуто базовое положение или достигнута ситуация отключения, например при достижении углов около ±45° относительно базового положения.
Согласно одному варианту осуществления изобретения (не показан) пульт 10 содержит ответный приемник, который предназначен для приема ответной информации от управляемой машины, причем в этом случае предполагается, что на машине предусмотрен посылающий такую ответную информацию ответный передатчик. В простейшем случае приемное устройство на машине может включать в себя ответный передатчик, который квитирует прием управляющих команд, так что ответная информация представляет собой подтверждение их приема. Если такое ожидаемое подтверждение радиоприема не регистрируется пультом 10, то его соответствующее средство вывода может указать пользователю на возможный сбой.
В другом варианте дистанционного радиоуправления согласно изобретению оно содержит сенсорное устройство, которое регистрирует данные о соответствующем фактическом положении подвижной части машины и/или о состоянии ее движения, и ответный передатчик на машине, посылающий данные этого сенсорного устройства в качестве ответной информации, причем ответный приемник пульта может принимать эту ответную информацию и передавать ее дальше на блок управления. Последний может тогда согласно одному варианту осуществления изобретения модифицировать управляющие команды для машины в зависимости от принятой ответной информации. Средства вывода могут быть выполнены также в виде индикаторного устройства так, что они отображают соответствующее фактическое положение и/или текущее отклонение фактического положения от определяемого положением пульта в данный момент заданного положения и/или скорость движения подвижной части машины. Также в этом отношении рассматривается оптическая, и/или акустическая, и/или тактильная индикация или вывод.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС С ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ | 2011 |
|
RU2596994C2 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ, УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ УПРАВЛЕНИЯ УСТРОЙСТВОМ ОТОБРАЖЕНИЯ, СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ОТОБРАЖЕНИЯ, СПОСОБ УПРАВЛЕНИЯ СЕРВЕРОМ И СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2013 |
|
RU2614519C2 |
| ИНТЕРФЕЙС ПОЛЬЗОВАТЕЛЯ | 2014 |
|
RU2642363C2 |
| СПОСОБ ДИСТАНЦИОННОГО РАДИОУПРАВЛЕНИЯ УСТРОЙСТВАМИ АВТОМОБИЛЯ | 2018 |
|
RU2688232C1 |
| БЛОК ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ПРОГРАММИРУЕМОГО МУЛЬТИМЕДИЙНОГО КОНТРОЛЛЕРА | 2007 |
|
RU2469409C2 |
| СПОСОБ РАБОТЫ МЕТАТЕЛЬНОЙ СИСТЕМЫ ДЛЯ МЕТАНИЯ ТАРЕЛОЧЕК | 2016 |
|
RU2686381C1 |
| ОДНОВРЕМЕННОЕ ПЕРЕОСНАЩЕНИЕ ОБРАБАТЫВАЮЩИХ УСТРОЙСТВ | 2012 |
|
RU2527995C2 |
| СПОСОБ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ИСТОЧНИКОМ ТОКА, А ТАКЖЕ СВАРОЧНЫЙ ШЛЕМ ДЛЯ ПОЛЬЗОВАТЕЛЯ ИСТОЧНИКОМ ТОКА | 2010 |
|
RU2498886C2 |
| ПОЛЬЗОВАТЕЛЬСКИЙ ИНТЕРФЕЙС ДЛЯ УПРАВЛЕНИЯ ВАННОЙ С ВИХРЕВЫМ ГИДРОМАССАЖЕМ | 2004 |
|
RU2334264C2 |
| Способ испытания мобильных боевых робототехнических комплексов и стенд для его осуществления | 2016 |
|
RU2630860C1 |



Изобретение относится к дистанционному радиоуправлению машиной. Технический результат заключается в повышении точности регистрации движения пульта в пространстве. Содержит, по меньшей мере, один управляемый им привод подвижной части машины, включает в себя пульт (10) с блоком управления, передающим устройством и, по меньшей мере, одним датчиком движения, причем блок управления передает введенные пользователем управляющие команды на передающее устройство и заставляет его передавать их на машину, в частности соответствующее приемное устройство, причем посредством датчика движения регистрируются движения пульта (10) в пространстве вокруг, по меньшей мере, одной оси наклона (KA, DA) таким образом, в режиме движения зарегистрированные движения преобразуются блоком управления в управляющие команды, передаваемые на машину, причем режим движения активируется за счет ввода пользователем на пульте (10). Согласно изобретению предложено, что блок управления выполнен таким образом, что при активировании режима движения текущее положение (I) пульта (10) в пространстве регистрируется в качестве текущего базового положения (I), в результате чего движения относительно этого текущего базового положения (I) регистрируются датчиком движения и передаются блоком управления на машину в виде управляющих команд. Кроме того, изобретение относится к способу эксплуатации предложенного дистанционного радиоуправления. 19 з.п. ф-лы, 7 ил.
1. Устройство дистанционного радиоуправления машиной, по меньшей мере, с одним управляемым посредством устройства дистанционного радиоуправления приводом подвижной части машины, содержащее соответствующее машине приемное устройство, пульт (10) с блоком управления, передающим устройством и, по меньшей мере, одним датчиком движения, причем блок управления выполнен с возможностью передачи введенных пользователем управляющих команд на передающее устройство, а передающее устройство выполнено с возможностью их передачи на приемное устройство, причем посредством датчика движения регистрируются движения пульта (10) в пространстве вокруг, по меньшей мере, одной оси наклона или вращения (KA, DA) таким образом, что в режиме движения зарегистрированные движения преобразовываются блоком управления в управляющие команды, передаваемые на машину посредством радиопередачи между передающим и приемным устройствами, причем режим движения активируется за счет ввода пользователем на пульте (10), отличающееся тем, что приемное устройство содержит ответный передатчик и выполнено с возможностью активирования при приеме управляющих команд ответного передатчика для передачи ответной информации, причем пульт содержит предназначенный для приема ответной информации и связанный с блоком управления ответный приемник, а также управляемое блоком управления акустическое и/или тактильное индикаторное устройство, выполненное с возможностью отображения информации о рабочих функциях дистанционного радиоуправления по мере приема ответных сигналов от ответного передатчика.
2. Устройство по п.1, отличающееся тем, что блок управления выполнен таким образом, что при активировании режима движения текущее положение (I) пульта в пространстве регистрируется в качестве текущего базового положения (I), в результате чего движения относительно этого текущего базового положения (I) регистрируются датчиком движения и передаются блоком управления на машину в виде управляющих команд.
3. Устройство по п.1, отличающееся тем, что оно выполнено таким образом, что при активировании режима движения текущее положение (IV) пульта (10) в пространстве регистрируется и сравнивается с заданным базовым положением (I), а зарегистрированные движения передаются в качестве управляющих команд на машину только тогда, когда дистанционное радиоуправление, по меньшей мере, приблизительно (II, II') приведено в заданное базовое положение (I), причем для формирования управляющих команд регистрируются движения относительно заданного базового положения.
4. Устройство по любому из пп.1-3, отличающееся тем, что на машине предусмотрены сенсорное устройство, регистрирующее данные о соответствующем фактическом положении подвижной части машины и/или состоянии ее движения, и ответный передатчик, посылающий данные этого сенсорного устройства в качестве ответной информации, при этом пульт содержит ответный приемник, предназначенный для приема ответной информации и связанный с блоком управления.
5. Устройство по любому из пп.1-3, отличающееся тем, что блок управления выполнен с возможностью модификации управляющих команд для машины в зависимости от принятой ответной информации.
6. Устройство по п.4, отличающееся тем, что блок управления выполнен с возможностью модификации управляющих команд для машины в зависимости от принятой ответной информации.
7. Устройство по п.4, отличающееся тем, что пульт содержит управляемое блоком управления оптическое, и/или акустическое, и/или тактильное индикаторное устройство, выполненное с возможностью отображения соответствующего фактического положения и/или текущего отклонения фактического положения от определяемого положением пульта в данный момент заданного положения и/или скорости движения подвижной части машины.
8. Устройство по п.6, отличающееся тем, что пульт содержит управляемое блоком управления оптическое и/или акустическое и/или тактильное индикаторное устройство, выполненное с возможностью отображения соответствующего фактического положения и/или текущего отклонения фактического положения от определяемого положением пульта в данный момент заданного положения и/или скорости движения подвижной части машины.
9. Устройство по любому из пп.1-3, 6-8, отличающееся тем, что оно содержит, по меньшей мере, одно средство вывода, соответствующее пульту (10), которое выполнено с возможностью формирования в качестве реакции на зарегистрированные движения воспринимаемого пользователем вывода, в частности оптического, и/или акустического, и/или тактильного сигнала на пульте.
10. Устройство по п.4, отличающееся тем, что оно содержит, по меньшей мере, одно средство вывода, соответствующее пульту (10), которое выполнено с возможностью формирования в качестве реакции на зарегистрированные движения воспринимаемого пользователем вывода, в частности оптического, и/или акустического, и/или тактильного сигнала на пульте.
11. Устройство по п.9, отличающееся тем, что средства вывода выполнены с возможностью формирования воспринимаемого пользователем вывода в зависимости от подаваемых датчиком движения сигналов.
12. Устройство по п.10, отличающееся тем, что средства вывода выполнены с возможностью формирования воспринимаемого пользователем вывода в зависимости от подаваемых датчиком движения сигналов.
13. Устройство по п.11 или 12, отличающееся тем, что средство вывода выполнено с возможностью формирования воспринимаемого пользователем вывода ступенчато в зависимости от силы подаваемых датчиком движения сигналов.
14. Устройство по п.13, отличающееся тем, что средство вывода выполнено с возможностью формирования воспринимаемого пользователем вывода пропорционально подаваемым датчиком движения сигналам.
15. Устройство по любому из пп.1-3, 6-8, 10-12, 14, отличающееся тем, что блок управления выполнен с возможностью преобразования движений, зарегистрированных датчиком движения, в рабочем диапазоне вращения или наклона от максимум примерно -45° до +45°, в частности от -30° до +30°, вокруг соответствующей горизонтальной оси вращения или наклона в управляющие команды для машины.
16. Устройство по п.15, отличающееся тем, что средство вывода выполнено с возможностью отображения приближения к максимальному вращательному или наклонному движению и/или отклонения от рабочего диапазона вращения или наклона посредством соответствующего, воспринимаемого пользователем вывода.
17. Устройство по п.9, отличающееся тем, что средство вывода выполнено с возможностью отображения приближения к максимальному вращательному или наклонному движению и/или отклонения от рабочего диапазона вращения или наклона посредством соответствующего, воспринимаемого пользователем вывода.
18. Устройство по п.13, отличающееся тем, что средство вывода выполнено с возможностью отображения приближения к максимальному вращательному или наклонному движению и/или отклонения от рабочего диапазона вращения или наклона посредством соответствующего, воспринимаемого пользователем вывода.
19. Устройство по п.15, отличающееся тем, что блок управления выполнен таким образом, что при отклонении от рабочего диапазона вращения или наклона формирования он не формирует никаких других управляющих команд на основе зарегистрированных движений.
20. Устройство по любому из пп.16-18, отличающееся тем, что блок управления выполнен таким образом, что при отклонении от рабочего диапазона вращения или наклона формирования он не формирует никаких других управляющих команд на основе зарегистрированных движений.
| Устройство для электрической защиты подогревателя высокого давления к паровой турбине | 1937 |
|
SU55760A1 |
| US 7127333 B2, 27.10.2006 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

