Изобретение относится области военной техники, в частности к средствам для испытания различных мобильных робототехнических комплексов военного назначения, и может быть использовано при испытаниях и отработке тактико-технических характеристик как принятых на вооружение, так и вновь создаваемых технических устройств данного типа.
Известные в настоящее время регламентированные способы испытаний мобильных робототехнических комплексов (РТК), например /1, 2/ заключаются преимущественно в последовательном (редко в одновременном) выполнении ряда тестовых процедур, требующих для осуществления различных внешних температурно-климатических условий, также различных по исполнению и размещению стационарных стендов, а кроме того, специально оборудованных трасс/полигонов. Все это влечет за собой необходимость "перемещений" объекта испытаний со стенда на стенд, на различные трассовые/полигонные участки, отсюда - большие временные и материальные затраты.
Так, например, ГОСТ Р 55895-2013 /1/ в режиме холостого хода предусматривает испытания по 9 параметрам, в режиме рабочего хода - по трем. А ГОСТ Р 54344-2011 /2/ - соответственно по 14-ти и 12-ти параметрам.
Кроме того, ряд испытаний вообще не предусмотрен, таких, например, как совместная работа РТК и его систем в условиях ограниченной видимости, в условиях движения с учетом крена, тангажа, рыскания и вибронагрузок как от работы механизмов самого устройства, так и от рельефа местности, типа дорожного покрытия (грунта), в условиях различных климатических воздействий и т.п.
Тем не менее имеется ряд технических решений, направленных на проведение испытаний с использованием программных имитационных моделей, расположенных в памяти компьютера и позволяющих осуществлять испытания объекта по нескольким параметрам в стендовых условиях.
Так в техническом решении /3/ описан способ исследования параметров движения самоходных транспортных средств преимущественно в условиях торможения с использованием имитационного моделирования. В стенде, предназначенном для реализации данного способа, источник информации о движении транспортного средства, генератор постоянной частоты и децелерометр с блоком формирования кода тормозного пути на участке юза выполнены в виде программных имитационных моделей, расположенных в памяти компьютера, а также имеются блоки формирования, определения, запоминания и индикации различных сигналов. На стенде задаются различные типы дорожных покрытий и состояния покрытий, различные скорости и траектории торможения. Обеспечивается возможность наблюдения и фиксации изменения тормозного пути для расчета тормозных характеристик транспортных средств.
Недостатки данных способа и устройства для его реализации следующие:
1 - испытаниям подвергается не реальное транспортное средство, а его имитационная компьютерная модель;
2 - испытания осуществляются для одного параметра, а именно -только характеристик торможения.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является стенд и способ исследования движения робокара /4/, предназначенные для исследования динамики мобильных транспортных средств.
Способ исследования процесса управления робокаром основан на сравнении заданной траектории движения с реальной траекторией при различных законах управления.
Стенд для исследования движения робокара представляет собой платформу, установленную стационарно на осях двух колес, приводимых во вращение двигателями, управляемыми бортовым контроллером путем гибко задаваемого алгоритма (закона) управления. Виртуальная траектория движения робокара, получаемая при помощи датчиков скоростей вращения круговых платформ, на которые опираются колеса, с учетом математической модели динамики платформы, электропривода и закона управления, отображается на мониторе персональной электронно-вычислительной машины, связанной с контроллером, относительно положения задаваемой в процессе исследования кинематической траектории, также отображаемой на мониторе.
Исходя из описания данной группы изобретений ее использование дает возможность проводить исследования динамики робокара на неподвижной стационарной установке. В отличие от технического решения-аналога /3/ здесь уже использованы возможности сочетания программно имитационного моделирования с физическим, позволяющим более полно исследовать кинематику и динамику "кажущегося" движения физической модели мобильного транспортного средства.
Однако данной группе изобретений присущ и ряд существенных недостатков:
1) Способ и стенд для его реализации предназначены для испытания не объекта как такового, а лишь его частичной физической модели, - а именно только пары движителей, причем приводимых в "движение" не за счет собственного, а за счет внешнего источника энергии.
2) Исследуются только траекторные характеристики условного перемещения физической модели, причем в условиях виртуального перемещения по плоской поверхности.
3) Способ и стенд не в состоянии обеспечить:
- испытания на устойчивость к климатическим воздействиям;
- Проверку работоспособности средств защиты системы управления (СУ) испытываемого объекта от ошибочных действий оператора;
- Раздельную и совместную работу систем объекта в движении и стационарном состоянии;
- Характеристики перемещения по пересеченной местности в условиях продольного и поперечного крена объекта;
- Проверку возможности РТС преодолевать препятствия;
- Проверку продолжительности непрерывной работы объекта и его систем и т.д. и т.п.
Согласно работе /5/, "основной тенденцией, определяющей пути создания и совершенствования перспективных боевых и обеспечивающих РТК, является поэтапное наращивание интеллектуальных возможностей дистанционно-управляемых образцов с постепенным исключением функций управления и контроля со стороны операторов (боевых расчетов)". Важнейшими направлениями здесь являются разработки систем автономного управления движением, систем технического зрения и навигации, систем автоматического поиска, обнаружения и распознавания неподвижных и движущихся объектов.
Вышеперечисленные усовершенствованные и вновь разрабатываемые системы, естественно требуют проведения комплексных испытаний, каковые с применением технических решений, заложенных в группу изобретений /4/, практически не выполнимы.
Технической задачей предлагаемого изобретения является устранение вышеотмеченных недостатков, т.е. обеспечение проведения комплекса многопараметрических тестовых проверок современных РТК при одновременном снижении временных и материальных затрат на испытания.
Решение поставленной задачи достигается тем, что в известном способе испытаний мобильных боевых робототехнических комплексов, заключающемся в последовательном/одновременном выполнении предусмотренных конструкторской документацией на объект испытаний тестовых процедур с применением программного имитационного моделирования, в соответствии с изобретением испытания объекта проводят в виртуальной интерактивной среде, управление которой частично осуществляется самим испытуемым объектом.
Реализация предложенного способа, в свою очередь, достигается тем, что в известном стенде для испытаний мобильных боевых робототехнических комплексов, содержащем установочную платформу для размещения испытуемого объекта, со смонтированными на ней устройствами взаимодействия с движителями объекта, выполненными с возможностью регулируемого вращения и связанными информационными каналами с комплектом управляющей и регистрирующей аппаратуры, в соответствии с изобретением платформа снабжена системой вибровозбуждения и размещена на отдельном основании, выполненном с возможностью управляемого поворота вокруг вертикальной оси и управляемых наклонов в продольном и поперечном направлениях, кроме того стенд дополнительно содержит комплекс оборудования отображения виртуальной окружающей среды в оптическом видимом, инфракрасном, ультрафиолетовом и акустическом диапазонах, включающий экранную поверхность, выполненную в форме замкнутой поверхности вращения, и снабженный проекционной и звуковоспроизводящей аппаратурой, комплекс оборудования отображения виртуальной электромагнитной среды и комплекс оборудования управляемого климатического воздействия, также связанные информационными каналами с комплектом управляющей и регистрирующей аппаратуры, при этом платформа для размещения испытуемого объекта установлена в центре замкнутого пространства, образованного экранной поверхностью.
В соответствии с /6, 7/:
«Виртуальная реальность, BP, искусственная реальность, электронная реальность, компьютерная модель реальности (англ. virtual reality, VR) --созданный техническими средствами мир (объекты и субъекты), передаваемый человеку через его ощущения: зрение, слух, обоняние, осязание и другие. Виртуальная реальность имитирует как воздействие, так и реакции на воздействие. Для создания убедительного комплекса ощущений реальности компьютерный синтез свойств и реакций виртуальной реальности производится в реальном времени. …Объекты виртуальной реальности обычно ведут себя близко к поведению аналогичных объектов материальной реальности. Пользователь может воздействовать на эти объекты в согласии с реальными законами физики (гравитация, свойства воды, столкновение с предметами, отражение и т.п.)».
«Интерактивность - это способность информационно-коммуникационной системы, активно и адекватно реагировать на действия пользователя. Такое свойство считается признаком того, что система «умная», то есть обладает каким-то интеллектом».
Т.е. в традиционном смысле понятия виртуальной среды (реальности) и интерактивности относятся применительно к человеку.
Отличительным признаком предлагаемого технического решения, касающегося способа испытаний РТК является создание и использование при испытаниях виртуальной среды (реальности), передаваемой не человеку, а в первую очередь испытываемому объекту - РТК, и воспринимаемой комплексом его бортовой аппаратуры посредством совокупности соответствующих датчиков. По сигналам от датчиков, в соответствии с заложенным в центральную бортовую вычислительную машину программным обеспечением, включающим "интеллектуальную" составляющую, РТК автономно принимает решение на выполнение некоторых действий, например, остановку в движении или поворота, команда об исполнении которых по информационным каналам дублируется на комплекс управляющей и регистрирующей аппаратуры, отвечающей за обеспечение поддержания характеристик виртуальной среды и ее изменение. Так при остановке воспринимаемая органами технического зрения РТК визуальная картина из динамической становится статической, при повороте меняется ракурс наблюдения (обзора) соответствующих объектов.
Естественно, что все выполняемые в условиях виртуальной среды испытываемым РТК действия, а также информация получаемая с его датчиков должны передаваться человеку-оператору. И в процессе автономно выполняемой РТК задачи испытаний оператор имеет возможность вводить в виртуальную среду определенные изменения, например внезапное появление наземной или воздушной цели, изменение метеоусловий и т.п., на что объект испытаний обязан отреагировать. Исходя из этого в отличительном признаке предлагаемого изобретения использовано понятие частичного (а не полного) управления виртуальной средой объектом испытаний.
В целом же испытание РТК в условиях виртуальной интерактивной среды, максимально имитирующей реальные условия, позволит существенно уменьшить как время проведения испытаний, так и финансовые затраты, т.к. в этом случае отпадает необходимость создания и поддержания в работоспособном состоянии соответствующего полигона.
Реализация предложенного способа, что очевидно, требует наличия совокупности технических устройств - стенда, обеспечивающего создание виртуальной интерактивной среды, характеристики которой максимально соответствуют реальным полигонным условиям.
Так наличие на установочной платформе системы вибровозбуждения позволит обеспечить вибрационные нагрузки на испытываемый объект в направлении перпендикулярном ее поверхности, имитирующие перемещение объекта по местности с различным рельефом, типом дорожного покрытия (грунта). Система вибровозбуждения может быть выполнена на основе механических, дебалансных, электромагнитных, пневматических вибраторов известных конструкций.
Размещение же установочной платформы на отдельном основании, естественно с элементами демпфирования, позволит локализовать вибровоздействие и максимально разгрузить от вибронагрузок как само основание, так и остальное, размещаемое на нем оборудование.
Выполнение основания под установочную платформу с возможностью управляемого поворота вокруг вертикальной оси, а также управляемых его наклонов в продольном и поперечном направлениях, позволит обеспечить имитацию движения объекта в различных направлениях, вплоть до полного разворота, с одновременной имитацией продольного и поперечного кренов, с учетом визуального отображения виртуальной среды.
Указанные управляемые движения основания могут быть обеспечены, например, его установкой на шаровой опоре с приводом вращения и введением в конструкцию минимум трех дополнительных опорных элементов регулируемой длины на основе гидро-, пневмо-, или винтовых механизмов, ответственных за выполнение наклонов основания, и соответственно соединенной с ним установочной платформы. Для обеспечения вертикальности опорных элементов регулируемой длины при управлении наклоном основания, соединение их с основанием должно быть шарнирным.
Вращение основания может быть обеспечено посредством приводных катков (колес), соединенных с опорными элементами регулируемой длины.
Выполнение экранной поверхности для отображения виртуальной окружающей среды (в оптическом видимом, инфракрасном и ультрафиолетовом диапазонах) в форме замкнутой поверхности вращения с установкой платформы для размещения испытуемого объекта в центре ее замкнутого пространства позволит с использованием соответствующей проекционной аппаратуры максимально имитировать внешнюю по отношению к объекту обстановку, воспринимаемую датчиками его технического зрения, а также системами навигации, ориентации, выявления и распознавания цели. Т.е. на экранную поверхность предполагается проецировать не только изображение местности, на которой осуществляется имитация перемещения объекта с привязкой к реперным отметкам, но также и отметки целей (в инфракрасном или ультрафиолетовом диапазоне), которые объект должен выявить и условно поразить.
Наиболее целесообразно экранную поверхность выполнить цилиндрической, полусферической, шарозого слоя или торового слоя.
Введение в виртуальную среду системы звукового отображения позволит более полно имитировать реальные условия испытаний, например испытывать реакцию РТК на внешние шумовые эффекты (звук выстрела, взрыва) и голосовые команды оператора при беспультовом управлении.
Использование виртуальной электромагнитной среды позволит одновременно испытывать аппаратуру связи испытываемого объекта с командным пунктом (оператором), а также способность к автономной работе в условиях внешних помех.
Оборудование управляемого климатического воздействия необходимо для обеспечения испытаний систем РТК с имитацией различных метеоусловий - в первую очередь температурных, а также наличия осадков, влияющих преимущественно на его оптические системы. Температурное воздействие целесообразно оказывать не на весь РТК, а локально на его наиболее ответственные устройства, - отсек двигателя, навесное оборудование и т.п., - например, путем обдува воздухом (газом) с заданной температурой. Элементы этого оборудования могут быть выполнены, в виде воздуходувок (газодувок), и устройств типа форсунок.
Связь всех вышеуказанных отдельных технических устройств, входящих в комплектацию стенда, по отдельным информационным каналам с комплектом управляющей и регистрирующей аппаратуры, выполненной на базе отдельного управляющего компьютера, позволит наиболее полно обеспечивать условия виртуальной интерактивной испытательной среды, управление которой частично осуществляется самим испытуемым объектом, а также оперативный контроль и, при необходимости, дополнительное внешнее управление процессом испытаний со стороны оператора или по заданной программе управляющим компьютером.
Изобретение поясняется следующей графической информацией.
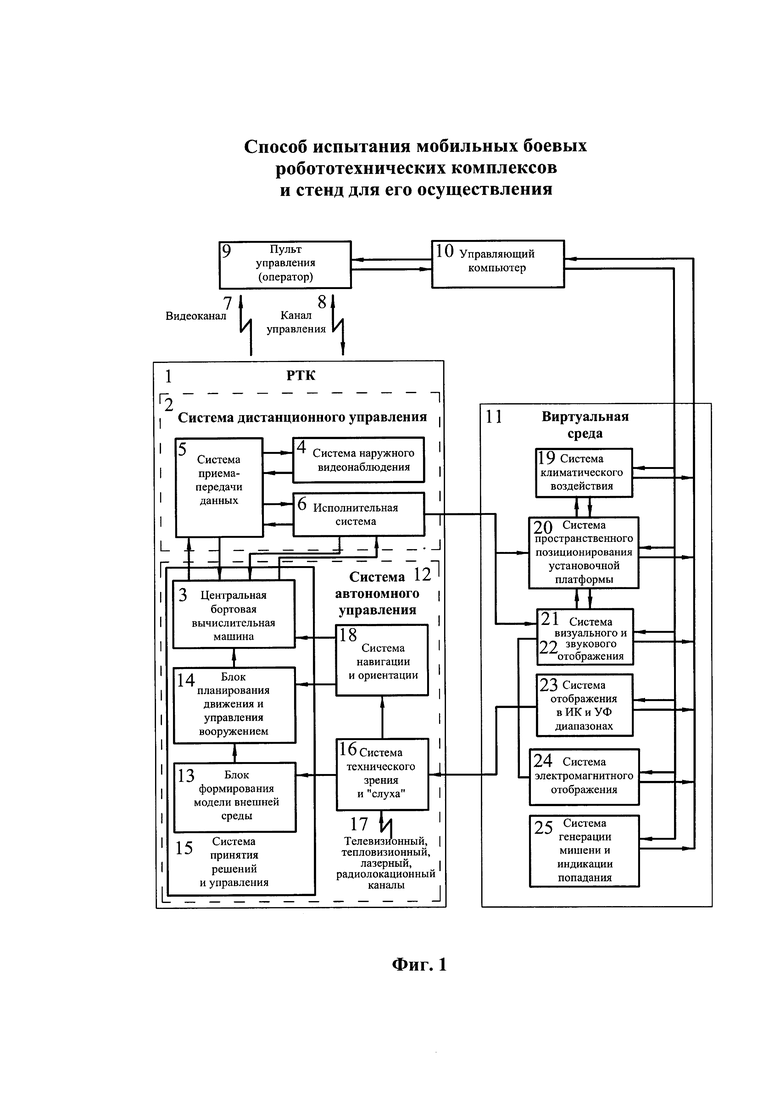
На фиг. 1 изображена принципиальная блок-схема осуществления способа, включающая основные системы испытываемого РТК, оператора, и системы оборудования виртуальной среды. Схема составлена с учетом основных положений работы /5/.
На фиг. 2 представлена схема стенда для испытания РТК, включающая оборудование создания виртуальной среды (для упрощения изображения часть оборудования условно не показана).
Испытываемый РТК 1 (фиг. 1) в общем случае содержит систему дистанционного управления (СДУ) 2, включающую в себя взаимосвязанные по информационным каналам через центральную бортовую вычислительную машину (ЦБВМ) 3 системы наружного видеонаблюдения 4, систему приема-передачи данных 5 и исполнительную систему 6. СДУ по видеоканалу 7 и каналу управления 8 имеет связь с пультом управления оператора 9. Одновременно через управляющий компьютер 10 пульт управления оператора 9 отдельными каналами связан с системами виртуальной среды 11.
Наряду с СДУ 2 испытываемый РТК 1 в общем случае также имеет систему автономного управления (САВТУ) 12, работа которой обеспечивается ЦБВМ 3.
САВТУ содержит блоки формирования модели внешней среды 13 и планирования движения и управления вооружением 14, составляющие, совместно с ЦБВМ 3 систему принятия решений и управления 15, и непосредственно связанные с системой технического зрения и "слуха" 16, обеспечивающей прием информации о внешней среде по телевизионному, тепловизионному, лазерному, радиолокационному и акустическому каналам 17, а также с системой навигации и ориентации 18.
Наконец, виртуальная среда для испытаний РТК 11 имеет в своем составе систему климатического воздействия 19, систему пространственного позиционирования установочной платформы 20, системы отображения информации в визуальном оптическом 21 и акустическом 22 диапазонах, инфракрасном (ИК) и ультрафиолетовом (УФ) диапазонах 23, систему электромагнитного отображения 24, а также систему генерации мишени и индикации попадания 25.
Все вышеуказанные системы виртуальной среды 11 могут управляться с как с пульта оператора 9, так и управляющим компьютером 10. Но, в то же время системы визуального отображения 21, ИК, УФ 23, электромагнитного 24 и акустического 22 отображений взаимодействуют через систему технического зрения 16 с САВТУ 12 испытываемого РТК 1. САВТУ же РТК в свою очередь через исполнительную систему 6 по каналам обратной связи взаимодействует с системой пространственного позиционирования установочной платформы 20 и системой визуального отображения 21, обеспечивая таким образом "изменение" условий внешней виртуальной среды 11.
Также с системой пространственного позиционирования установочной платформы 20 по каналам обратной связи взаимодействует и система климатического воздействия 19.
Стенд для испытаний РТК в условиях виртуальной среды схематично представлен на фиг. 2. Для упрощения изображения приводные устройства исполнительных механизмов стенда, а также информационные каналы их связи с комплектом управляющей и регистрирующей аппаратуры на схеме не показаны.
Стенд содержит установочную платформу 26 со смонтированными на ней устройствами взаимодействия с движителями объекта 27, выполненными с возможностью регулируемого вращения. Испытываемый РТК 1 крепится на платформе посредством талрепов 28. Т.к. платформа с установленным на ней РТК в процессе испытаний может быть подвергнута вибровоздействию, для устранения его влияния на остальные механизмы стенда, она содержит демпфирующие элементы 29, через которые соединена с основанием 30. Основание 30 установлено на центральной шаровой опоре 31, обеспечивающей как управляемый его поворот вокруг вертикальной оси, так и управляемые наклоны, и снабжено шарнирно скрепленными с ним тремя опорными элементами регулируемой длины 32. Опорные элементы 32 в свою очередь соединены с приводными катками (колесами) 33. Энергообеспечение механизмов установочной платформы 26 и ее основания 30 обеспечивается токосъемником 34. Установочная платформа 26 размещена в центре цилиндрического замкнутого пространства, образованного экранной поверхностью 35 для отображения виртуальной окружающей среды (в оптическом видимом, инфракрасном и ультрафиолетовом диапазонах).
Выше уровня платформы размещен комплект проекционной аппаратуры 36 для отображения на экранную поверхность 35 панорамного изображения виртуальной среды (местности) в визуальном режиме. За экранной поверхностью размещен комплект звуковоспроизводящей аппаратуры 37.
Наряду с вышеописанными устройствами стенд содержит оборудование систем отображения в ИК и УФ диапазонах 38, электромагнитного отображения 39 и климатического воздействия 40. "Направление" работы систем оборудования обозначено стрелками.
Позицией 41 обозначена условная отметка цели, устанавливаемая посредством оборудования систем отображения в ИК и УФ диапазонах 38.
Предложенный способ и работа реализующего его устройства - стенда осуществляется следующим образом.
Испытываемый РТК 1 ставится на устройства взаимодействия с его движителями 27 (движители РТК, изображенного на фиг. 2 - гусеницы) установочной платформы 26 и крепится на ней талрепами 28.
В память управляющего компьютера 10, а также ЦБВМ 3 (фиг. 1) предварительно вводится карта (план) местности с учетом природных и техногенных объектов, и ставится задача, например, на "перемещение" РТК из точки старта в определенную позицию, соответствующую точке на карте с определенными координатами. Также в память управляющего компьютера вводится программа испытаний, регламентирующая климатическое воздействие на РТК, генерацию помех (электромагнитное отображение), генерацию мишени и т.д. в определенные моменты времени. В процессе "перемещения" РТК должен анализировать окружающую среду и адекватно реагировать на ее изменения, т.е. осуществлять необходимые маневры в движении, выявлять и поражать цели и т.п.
В соответствии с заданной программой включаются устройства систем 35…40, обеспечивающих "работу" виртуальной среды 11 (фиг. 1, 2), - т.е. РТК помещается в виртуальную интерактивную среду, включающую визуальную (во всех диапазонах - видимом, инфракрасном, ультрафиолетовом) отображаемую на экранной поверхности 35, электромагнитную, климатическую (вплоть до осадков) и другие возможные составляющие. Приводятся в действие системы РТК, он начинает "движение". Одновременно включаются и смонтированные на установочной платформе 26 устройства взаимодействия с движителями объекта 27 - по сути наборы валков, отдельные для левого и правого движителя РТК, регулируемое вращение которых осуществляется со скоростью и направлением, обеспечивающими неподвижность РТК относительно установочной платформы. Системой технического зрения и "слуха" 16 РТК первоочередно воспринимаются визуальная (в оптическом диапазоне) и акустическая составляющие виртуальной среды, отображаемые соответственно на экранной поверхности 35 проекционной аппаратурой 36 и комплектом звуковоспроизводящей аппаратуры 37.
Информация, полученная РТК 1 от системы технического зрения и «слуха» 16 (фиг. 1), исходно поступает на обработку в блок формирования модели внешней среды 13 и систему навигации и ориентации 18, где анализируется и сравнивается с имеющейся в памяти картой (планом) местности. И затем, будучи обработана блоком планирования движения и управления вооружением 14, посредством ЦБВМ 3 преобразуется в набор команд, передаваемых исполнительной системе 6, для последующей их передачи как на механизмы и оборудование РТК, так и на механизмы и аппаратуру стенда. Первоочередно это команды на осуществление движения.
Находясь в виртуальной среде на установочной платформе 26 стенда РТК для выполнения поставленной задачи испытаний «движется» в соответствии с намеченным на карте (плане) маршрутом, осуществляя в процессе движения определенные маневры - торможение, повороты, ускорение, останов при необходимости поражения цели. Возникающая при этом рассинхронизация скоростей движителей РТК и взаимодействующих с ними размещенных на платформе устройств 27, выполненных с возможностью регулируемого вращения, воспринимается соответствующими датчиками и по информационным каналам передается на систему пространственного позиционирования установочной платформы 20, а затем через систему визуального 21 и звукового 22 отображения через САВТУ 12 - на исполнительную систему 6.
Т.к. «перемещение» РТК 1 происходит в пространстве с изменяющимися характеристиками, включающими рельеф местности, природные и техногенные объекты на ней и т.п., для наиболее полной имитации этого движения отображение окружающей среды, воспринимаемое системой технического зрения и «слуха» 16, должно соответствующим образом изменяться. Ответственной за эти изменения и является исполнительная система РТК 6.
В соответствии с выполняемыми маневрами и наблюдаемой РТК 1 внешней средой исполнительная система выдает команды на механизмы системы пространственного позиционирования установочной платформы 26, систему ее вибровозбуждения, проекционные и звуковоспроизводящие устройства 36, 37, механизмы управления системой климатического воздействия 40 (в случае ее работы).
Установочная платформа 26 совместно с РТК 1 меняет свою ориентацию в пространстве посредством поворота, крена, вследствие чего синхронно меняется и отображение виртуальной среды 11, воспринимаемое системой технического зрения и «слуха» 16. В случае одновременной работы системы климатического воздействия 40 также синхронно осуществляется переориентация ее устройств, обязанных осуществлять направленное локальное воздействие на наиболее ответственные устройства РТК.
Таким образом, благодаря постоянному циклическому обмену информацией между САВТУ 12 РТК 1, его исполнительной системой 6 и виртуальной средой 11, интерактивное управление ею частично осуществляет сам испытываемый объект.
При необходимости, в соответствии с программой испытаний оператором или управляющим компьютером на экранной поверхности 35 системой генерации мишеней 25 посредством проекционных устройств системы отображения в ИК и УФ диапазонах 23 задаются отметки целей 41, включается/выключается система электромагнитного отображения 24, звуковоспроизводящей аппаратурой 37 имитируются «внезапные» шумовые эффекты (выстрел, взрыв). Реагируя на данные события РТК 1 в соответствии с собственной внутренней программой, включающей элементы искусственного интеллекта, например, выявляет посредством системы технического зрения и «слуха» отметки целей - «мишени», и параллельно, используя систему навигации и ориентации 18, через блок планирования движения и управления вооружением 14 и ЦБВМ 3, выдает команду исполнительной системе на имитацию выстрела для поражения цели. Имитация выстрела может осуществляться, как и отметка мишени 41, - ИК или УФ источником. Системой индикации попадания 25, по изменению характеристик исходной отметки цели, результат фиксируется в памяти управляющего компьютера 10. Реакцией РТК 1 на звук выстрела может быть выявление направления на его источник и затем собственный ответный «выстрел».
Предложенные способ испытания мобильных боевых робототехнических комплексов и стенд для его осуществления (устройство), позволят обеспечить проведение комплекса многопараметрических тестовых проверок современных РТК, позволяющих наряду с учетом кинематики и динамики движения в условиях различного рельефа, проводить исследования, связанные с точностью отслеживания заданной траектории, позиционированием в окружающем пространстве, работы его САВТУ, навесного оборудования и т.п., т.е. совместной работы РТК и его систем.
Одновременно возможно существенное уменьшение временных и материальных затрат на испытания, поскольку, благодаря использованию программно-имитационного моделирования и созданию виртуальной среды с элементами интерактивности применительно к реальному физическому объекту испытаний, не требуется строительство и оборудование специальных полигонов/трасс большой площади или протяженности и исключается зависимость от природно-климатических условий их размещения.
Источники информации
1) ГОСТ Р 55895-2013. Техника пожарная. Системы управления робототехнических комплексов для проведения аварийно-спасательных работ и пожаротушения. Общие технические требования. Методы испытаний.
2) ГОСТ Р 54344-2011. Техника пожарная. Мобильные робототехнические комплексы для проведения аварийно-спасательных работ и пожаротушения. Классификация. Общие технические требования. Методы испытаний.
3) Патент РФ №2247961, G01M 17/007, G09B 9/04, Стенд для исследования параметров движения транспортных средств, 2003 г.
4) Патент РФ №2561405, G01M 17/007, Стенд и способ исследования движения робокара, 2013 г. – прототип.
5) Рубцов И.В., Бошляков А.А., Лапшов B.C., Машков К.Ю., Носков В.П. Проблемы и перспективы развития мобильной робототехники военного назначения. Инженерный журнал: наука и инновации (Электронное научно-техническое издание), 2015, вып. 05(41), URL; http://engjoumal.ru/catalog/mesc/rmrs/13
6) Сайт https://ru.wikipedia.org/wiki/Виртyальная_реальность
7) Сайт https://ru.wikipedia.org/wiki/Интерактивность
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| СТЕНД И СПОСОБ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ РОБОКАРА | 2013 |
|
RU2561405C2 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2013 |
|
RU2538322C1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ НАГРУЖЕННОГО МОБИЛЬНОГО РОБОТА ПРИ НАЛИЧИИ ПРОСКАЛЬЗЫВАНИЯ КОЛЁС | 2017 |
|
RU2670352C1 |
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Универсальная роботизированная платформа | 2016 |
|
RU2639009C1 |

Группа изобретений относится к способу испытаний мобильных боевых робототехнических комплексов и к стенду для испытаний. Способ заключается в последовательном/одновременном выполнении необходимых тестовых процедур с применением программного имитационного моделирования в виртуальной среде. Виртуальная среда выполнена интерактивной. Управление виртуальной средой частично осуществляется самим испытуемым мобильным боевым робототехническим комплексом. Стенд содержит установочную платформу для размещения испытуемого объекта, со смонтированными на ней устройствами взаимодействия с движителями объекта, выполненными с возможностью регулируемого вращения и связанными информационными каналами с комплектом управляющей и регистрирующей аппаратуры. Платформа снабжена системой вибровозбуждения и размещена на отдельном основании. Дополнительно стенд содержит комплекс оборудования отображения виртуальной окружающей среды в оптическом видимом, инфракрасном, ультрафиолетовом и акустическом диапазонах. Платформа для размещения испытуемого объекта установлена в центре замкнутого пространства, образованного экранной поверхностью. Достигается возможность проведения испытаний с использованием виртуальной среды. 2 н.п. ф-лы, 2 ил.
1. Способ испытаний мобильных боевых робототехнических комплексов, заключающийся в последовательном/одновременном выполнении необходимых тестовых процедур с применением программного имитационного моделирования в виртуальной среде, отличающийся тем, что виртуальная среда выполнена интерактивной, а управление виртуальной средой частично осуществляется самим испытуемым мобильным боевым робототехническим комплексом.
2. Стенд для испытаний мобильных боевых робототехнических комплексов, содержащий установочную платформу для размещения испытуемого объекта, со смонтированными на ней устройствами взаимодействия с движителями объекта, выполненными с возможностью регулируемого вращения и связанными информационными каналами с комплектом управляющей и регистрирующей аппаратуры, отличающийся тем, что платформа снабжена системой вибровозбуждения и размещена на отдельном основании, выполненном с возможностью управляемого поворота вокруг вертикальной оси и управляемых наклонов в продольном и поперечном направлениях, кроме того, стенд дополнительно содержит комплекс оборудования отображения виртуальной окружающей среды в оптическом видимом, инфракрасном, ультрафиолетовом и акустическом диапазонах, включающий экранную поверхность, выполненную в форме замкнутой поверхности вращения, и снабженный проекционной и звуковоспроизводящей аппаратурой, комплекс оборудования отображения виртуальной электромагнитной среды и комплекс оборудования управляемого климатического воздействия, также связанные информационными каналами с комплектом управляющей и регистрирующей аппаратуры, при этом платформа для размещения испытуемого объекта установлена в центре замкнутого пространства, образованного экранной поверхностью.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МУЛЬТИКОПТЕР С ЛИНЕЙНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2014 |
|
RU2577822C2 |
| СТЕНД И СПОСОБ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ РОБОКАРА | 2013 |
|
RU2561405C2 |
| CN 202501986 U, 24.10.2012 | |||
| US 2004167682 A1, 26.08.2004. | |||

