Изобретение относится к способу, устройству и машиночитаемому носителю данных, используемых при построении геологической модели нефтяного или иного месторождения. В частности изобретение относится к способу, устройству и машиночитаемому носителю данных, используемых для определения положения координат глубин маркера на скважинах W из опорной группы скважин при построении геологической модели.
Уровень техники
Из уровня техники известен источник ЕА 200600036 A1, E21B 7/04, 30.12.2008, описывающий пакет программ, хранимых в памяти на автоматизированном рабочем месте или в другой вычислительной компьютерной системе, предназначенных для построения модели одиночной скважины.
Известен источник US 2007/0276604 A1, G01V 1/00, 29.11.2007, который раскрывает способ визуализации и организации данных месторождений нефти и газа. Способ раскрывает обработку каротажных диаграмм скважин, которая заключается в использовании растровых изображений каротажных диаграмм, которые переводятся в цифровой формат для последующего нанесения на них маркера.
Источник US 2010/0004864 A1, G01V 9/00, 07.01.2010 раскрывает способ корреляции каротажных диаграмм, который заключается в том, что автоматически коррелируют данные множества каротажных диаграмм, описывающих информацию на различных участках местности.
Все из вышеуказанных источников в той или иной степени раскрывают общие принципы моделирования геологической модели месторождения полезных ископаемых, однако ни один из вышеприведенных источников не обеспечивает и не подразумевает генерирование высокоточной геологической модели на основании коэффициентов корреляции между большими группами скважин относительно положений глубинных маркеров, что в свою очередь позволяет повысить точность определения расположения месторождений полезных ископаемых. Раскрытие изобретения
Задачей, на которое направлено заявленное изобретение, является построение геологической модели с точным определением положений нефтяных или иных месторождений.
Техническим результатом является повышение точности вычислений параметров, используемых при построении геологической модели расположения нефтяных или иных месторождений.
Задача корреляции комплексов кривых ГИС предполагает наличие группы скважин, для которых проведены исследования ГИС методами, достаточными для стратиграфического и литологического анализа. Без ограничения общности, считается, что в результате этих исследований для каждой скважины группы получен набор кривых ГИС, по одной для каждого метода. Для построения геологической модели залежи важным этапом является прослеживание границ стратиграфических комплексов или литологических свойств. Эти границы могут быть выявлены вдоль скважин и продолжены на исследуемую площадь путем интерполяции. Такие границы, называемые маркерами, имеют на скважинах глубинные отметки, которые располагаются в местах совокупных особенностей кривых ГИС.
Одной из своих сторон настоящее изобретение относится к способу для определения положения координат глубин маркера при построении геологической модели месторождения.
Указанный технический результат достигается тем, что в способе определения положения координат глубин маркеров на скважинах W из опорной группы скважин при построении геологической модели месторождения выделяют этапы, на которых:
- определяют скважины W и скважины, расположенные в заданной окрестности скважины W, при этом окрестность имеет радиус R;
- определяют значение отметки глубины маркера {zi},i=0,...,n на каждой скважине W и скважинах, расположенных в заданной окрестности скважины W;
- определяют значение функционала С в точках, имеющих значение отметки глубины маркера {zi};
- составляют векторы градиента для точек, имеющих значение отметки глубины маркера {zi};
- осуществляют сглаживание вектора градиента путем замены каждой из компонент вектора градиента на скважине W на среднее значение компонент векторов градиента на скважинах из окрестности радиуса R;
- для отрезка заданной длины с начальной точкой отметки глубины маркера {zi} в направлении вектора градиента с заданным шагом проводят поиск значения функционала С, большего, чем предыдущее найденное значение функционала С, и если такое значение не найдено, то текущее значение отметки глубины маркера {zi} считается определенным;
- уточняют упомянутое определенное значение отметки глубины маркера {zi} путем поиска большего значения отметки глубины маркера {zi} в пределах заданного шага;
- для значения отметки глубины маркера {zi}, при котором значение функционала С является наибольшим, осуществляют сглаживание вектора градиента путем замены каждой из компонент вектора на скважине W на среднее значение компонент из окрестности уменьшенного на заданную величину радиуса R; сортируют отметки глубины маркера {zi} по глубине и;
- итеративно повторяют предыдущие этапы способа до тех пор, пока не будет найдено большее значение функционала С.
В другом варианте способа сглаживание осуществляют методом скользящего среднего в окне, причем коэффициентом сглаживания является радиус окна.
Итак, в одном варианте осуществления изобретения способ включает в себя определение коэффициентов корреляции для комплекса кривых ГИС на парах скважин, расположенных не дальше заданного расстояния друг от друга и нахождение положений глубин маркера, для которых этот коэффициент является максимальным. Глубины маркера ищутся для скважин, не входящих в опорную группу, для которой эти глубины предварительно заданы. Метод состоит также в многократном повторении описанного поиска с включением вновь найденных скважин в опорную группу на каждой итерации. Поиск фильтруется набором тестов, повышающих точность вычислений. В способе могут быть задействованы трендовые маркеры, использование которых увеличивает его эффективность.
Метод позволяет для маркера, уже имеющего отметки на некоторой, называемой опорной группе скважин, вычислить их для скважин из другой группы. Для каждой скважины W, на которой ищется значение глубины маркера, выбираются скважины опорной группы, отстоящие от скважины W на заданном расстоянии, и среди них выбирается скважина с наибольшим значением коэффициента корреляции. Тогда точка на скважине W, в которой этот максимум достигается, назначается в качестве искомой отметки маркера. Полагая далее результат работы описанного алгоритма итерацией обобщенного алгоритма и добавляя в опорную группу после каждой итерации скважины его решения, процесс повторяют до тех пор, пока алгоритм выполнения способа не даст пустой результат, т.е. не сообщит о том, что все скважины, для которых были обнаружены отметки маркера, проанализированы и выявлены в заданной области. Такое "зацикливание" основного алгоритма позволяет получить решение для большого количества скважин. Для повышения надежности расчета в метод добавлен ряд тестов, не допускающих установки отметок маркера в "плохих" местах. Эти тесты следующие: порог корреляции, качество корреляции, уровень транзитивности, ограничения по значениям функций на скважине.
Во втором варианте осуществления изобретения способ включает в себя вычисление функционалов, представляющих собой сумму коэффициентов корреляции для комплекса кривых ГИС в точках маркеров, являющихся начальным приближением, на парах скважин, расположенных не дальше заданного расстояния друг от друга, и нахождение их максимумов с помощью адаптированного к задаче алгоритма градиентного спуска.
Такой способ позволяет для маркеров, выбранных в качестве начального решения, вычислить такие глубины маркера на каждой скважине, которые обеспечивают наилучшую суммарную корреляцию. Для каждого маркера, входящего в набор, определяется функционал, представляющий собой сумму коэффициентов корреляции комплекса методов ГИС для пар скважин, расположенных не далее заданного расстояния друг от друга. Для этого функционала вычисляются частные производные и полученный таким образом вектор сглаживается и используется для нахождения большего значения функционала на некотором отрезке вдоль этого вектора. Если большего значения не найдено, то последнее положение отметок маркера считается решением задачи, а если найдено, то производится сглаживание точки решения и процесс повторяется снова. На каждой итерации алгоритма производится сортировка глубин маркеров.
Другой своей стороной настоящее изобретение относится к устройству для определения положения координат глубин маркера при построении геологической модели месторождения.
Указанный технический результат достигается тем, что в устройство для определения положения координат глубин маркеров на скважинах W из опорной группы скважин при построении геологической модели месторождения содержит:
- один или множество процессоров;
- модули ввода/вывода (I/O); машиночитаемый носитель данных (память), который содержит код программы, который побуждает процессор или процессоры выполнять этапы, на которых осуществляется: определение скважины W, и скважины, расположенные в заданной окрестности скважины W, при этом окрестность имеет радиус R; определение значения отметки глубины маркера {zi},i=0,…,n на каждой скважине W и скважинах, расположенных в заданной окрестности скважины W; определение значения функционала С в точках, имеющих значение отметки глубины маркера {zi}; составление векторов градиента для точек, имеющих значение отметки глубины маркера {zi}; осуществление сглаживания вектора градиента путем замены каждой из компонент вектора градиента на скважине W на среднее значение компонент векторов градиента на скважинах из окрестности радиуса R; для отрезка заданной длины с начальной точкой отметки глубины маркера {zi} в направлении вектора градиента с заданным шагом осуществляется поиск значения функционала С, большего, чем предыдущее найденное значение функционала С, и если такое значение не найдено, то текущее значение отметки глубины маркера {zi} считается определенным; уточнение упомянутого определенного значения отметки глубины маркера {zi} путем поиска большего значения отметки глубины маркера {zi} в пределах заданного шага; для значения отметки глубины маркера {zi}, при котором значение функционала С является наибольшим осуществляется сглаживание вектора градиента путем замены каждой из компонент вектора на скважине W на среднее значение компонент из окрестности уменьшенного на заданную величину радиуса R; сортировка отметок глубины маркера {zi} по глубине и; итеративное повторение предыдущих этапов до тех пор, пока не будет найдено большее значение функционала С.
В другом варианте устройства сглаживание осуществляется методом скользящего среднего в окне, причем коэффициентом сглаживания является радиус окна.
Устройство может представлять собой, но не ограничиваться: суперкомпьютер, персональный компьютер, портативный компьютер, планшетный компьютер, карманный компьютер, смартфон и тому подобное. Устройство обязательно содержит один или более процессоров, которые предназначены для выполнения компьютерных команд или кодов, хранящихся в памяти устройства с целью обеспечения выполнения способов по первому или второму вариантам осуществления настоящего изобретения, машиночитаемый носитель данных (память) и модули ввода/вывода (I/O). Модули I/O представляют собой, но не ограничиваются, типичные и известные из уровня техники средства управления устройством: манипулятор типа «мышь», клавиатура, джойстик, тачпад, трекбол, электронное перо, стилус, сенсорный дисплей и тому подобное. Так же модули I/O представляют собой, но не ограничиваются типичные и известные из уровня техники средства демонстрирования информации: монитор, проектор, принтер, графопостроитель и тому подобное. В качестве примера, а не ограничения, машиночитаемый носитель данных может включать в себя оперативную память (RAM); постоянное запоминающее устройство (ROM); электрически-стираемое программируемое постоянное запоминающее устройство (EEPROM); флэш-память или другие технологии памяти; CDROM, цифровой универсальный диск (DVD) или другие оптические или голографические носители данных; магнитные кассеты, магнитную пленку, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства, несущие волны или другой носитель данных, который может быть использован для кодирования требуемой информации и к которому может быть осуществлен доступ посредством устройства, описанного выше.
Третьей своей стороной изобретение относится к машиночитаемому носителю данных для определения положения координат глубин маркера при построении геологической модели месторождения.
Машиночитаемый носитель данных содержит код программы, который побуждает процессор и/или процессоры выполнять действия по способу, описанному в первом или втором вариантах осуществления изобретения и которые, соответственно, дополнительно не описываются. В качестве примера, а не ограничения, машиночитаемый носитель данных может включать в себя оперативную память (RAM); постоянное запоминающее устройство (ROM); электрически-стираемое программируемое постоянное запоминающее устройство (EEPROM); флэш-память или другие технологии памяти; CDROM, цифровой универсальный диск (DVD) или другие оптические или голографические носители данных; магнитные кассеты, магнитную пленку, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства, несущие волны или другой носитель данных, который может быть использован для кодирования требуемой информации и к нему может быть осуществлен доступ посредством устройства, описанного в третьем варианте осуществления изобретения и которое, соответственно, дополнительно не описывается.
Краткое описание чертежей
Фиг.1 иллюстрирует общую схему выполнения способа по первому варианту осуществления изобретения.
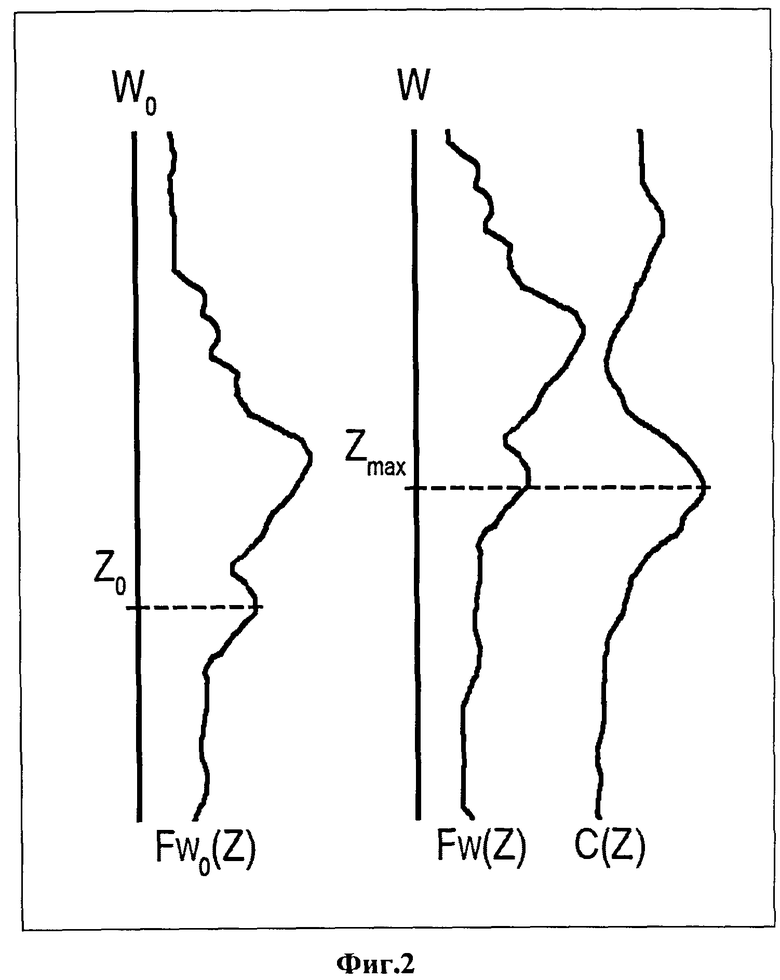
Фиг.2 иллюстрирует кривые метода ГИС на скважинах W и W0 соответственно и функцию корреляции метода ГИС.
Фиг.3 иллюстрирует этап определения расстояния между группами скважин.
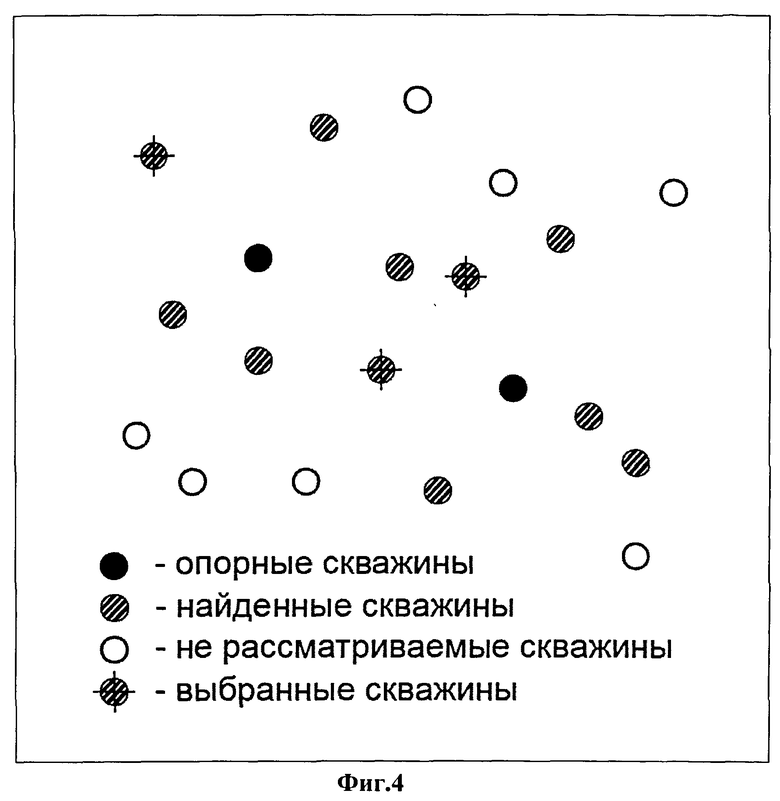
Фиг.4 иллюстрирует этап определения глубины zmax, соответствующей максимальному значению корреляции.
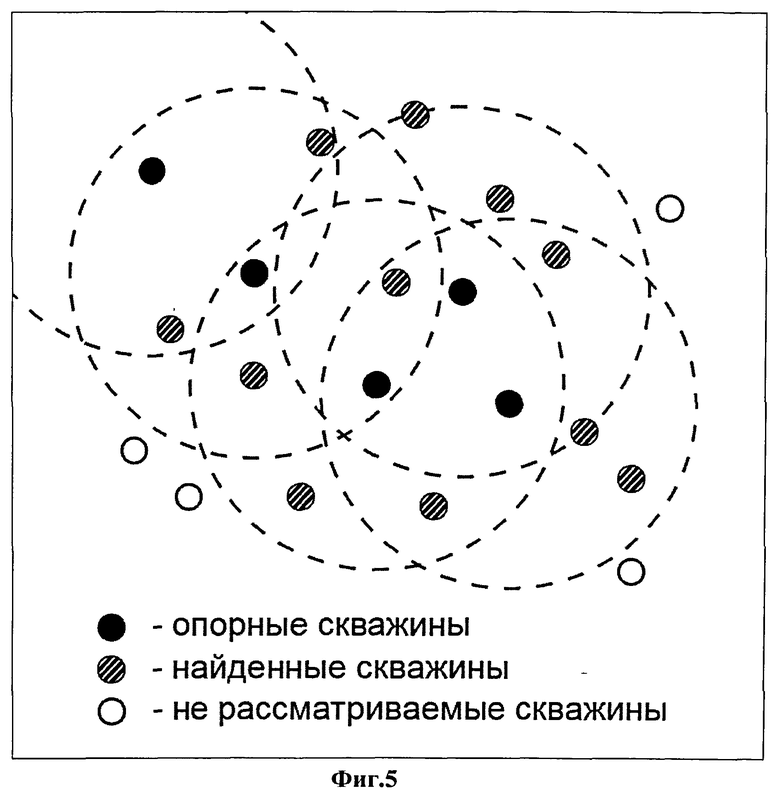
Фиг.5 иллюстрирует этап добавления к опорной группе скважин, глубина которых была определена на этапе определения глубины zmax.
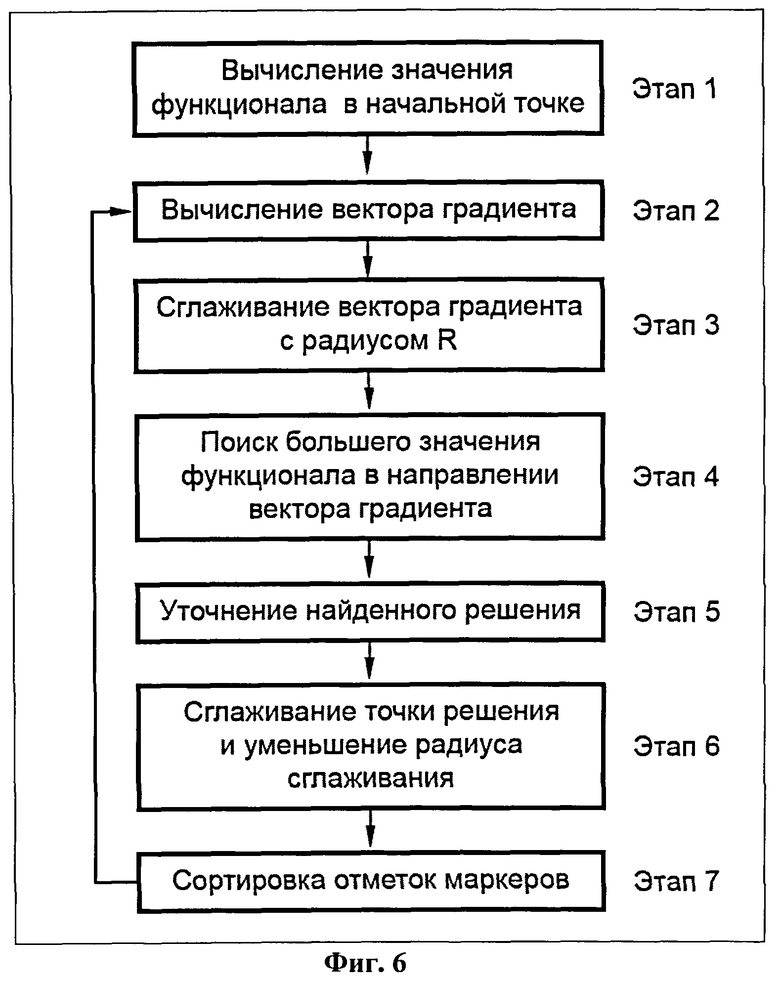
Фиг.6 иллюстрирует общую схему выполнения способа по второму варианту осуществления изобретения.
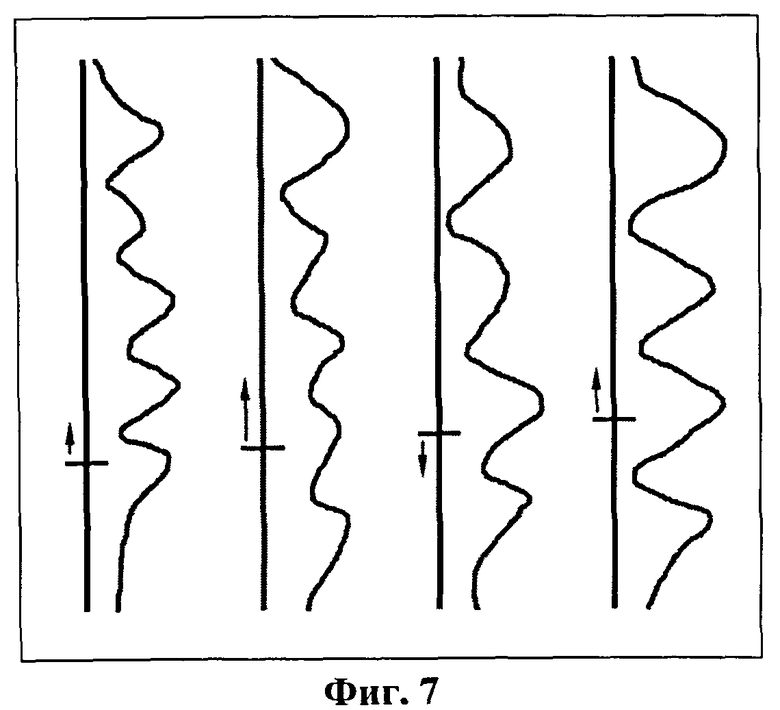
Фиг.7 иллюстрирует этап составления вектора градиента для текущей точки решения.
Фиг.8 иллюстрирует этап определения в направлении вектора градиента значения функционала, большего предыдущего.
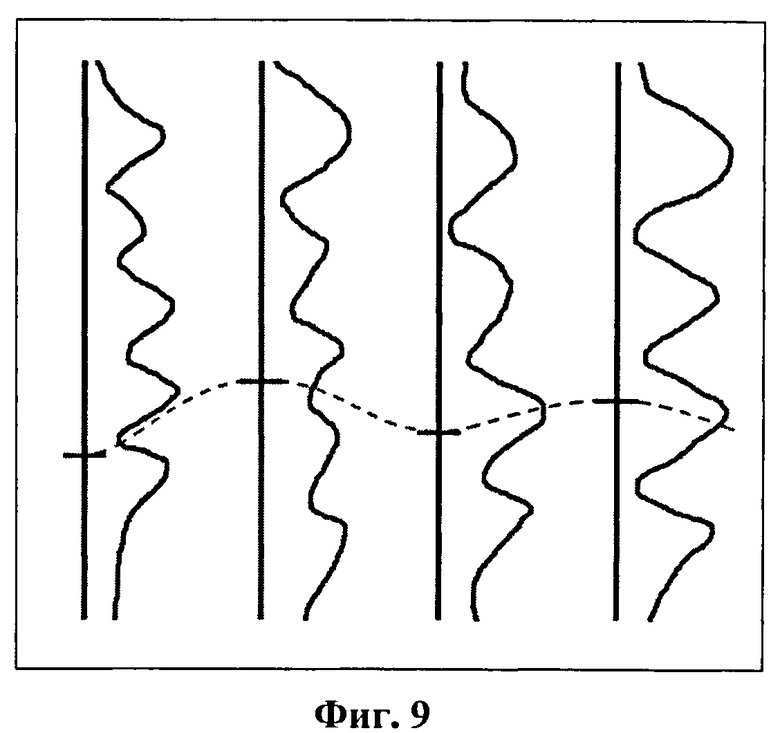
Фиг.9 иллюстрирует этап сглаживания найденного решения.
Детальное описание чертежей
Метод решения задачи, описываемый далее в отношении первого варианта осуществления изобретения, состоит в нахождении глубин маркера путем вычисления коэффициента корреляции комплекса кривых ГИС на парах скважин, для одной из которых эта задача уже решена. А именно, пусть для некоторой подгруппы скважин, которую мы называем опорной, глубины маркера уже заданы. Тогда, выбрав одну из опорных скважин W0 с глубиной маркера z0, для любой скважины W, не принадлежащей опорной группе, мы вычисляем функцию корреляции C(z), значениями которой являются коэффициенты корреляции комплекса кривых ГИС на скважине W в точке z и на скважине W0 в точке z0. Обозначим zmax максимум этой функции. Если для скважины W найдены скважины опорной группы, расположенные в заданной ее окрестности, то глубина Zmax, соответствующая опорной скважине с наибольшим значением максимума функции C(z), считается возможной глубиной маркера на скважине W. Функция корреляции принимает значения от -1 до 1 и для одного метода ГИС F определяется следующим образом:
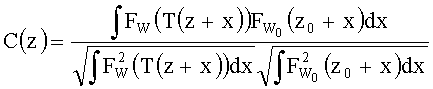
где FW и 

где Ci(z)- функция корреляции для метода Fi, a wi - весовые коэффициенты (Фиг.2).
В соответствии с фиг.1 далее будут подробно изложены этапы выполнения способа.
На первом этапе метода находятся скважины, расположенные в заданной окрестности опорной группы скважин, то есть расположенные не далее заданного расстояния R от какой-нибудь скважины опорной группы. Расстояние между скважинами может быть определено несколькими способами: как расстояние между точками скважины на фиксированной глубине, как расстояние между точками заданного маркера или как расстояние между точками пересечения скважин с заданной поверхностью (Фиг.3).
Второй этап метода состоит в вычислении функций корреляции и выборе для каждой, найденной на первом этапе, скважины W, соответствующей ей скважины из опорной группы W0 с максимальным коэффициентом корреляции и соответствующей ей точке zmax на скважине W.
На третьем этапе каждая выбранная на втором этапе скважина W подвергается проверке на ряд тестов и если эта проверка оказывается успешной, то выбор скважины считается утвержденным, а глубина zmax, соответствующая максимальному значению корреляции, назначается глубиной маркера на скважине ГГ(Фиг.4).
На четвертом этапе метода скважины с утвержденным, на третьем этапе, выбором добавляются к опорной группе, и происходит переход снова к первому этапу (Фиг.5).
Этот процесс повторяется до тех пор, пока на первом, втором, либо третьем этапе не будет найдено ни одной скважины. Тестами, входящими в проверку на третьем этапе, являются:
1. превышение функцией корреляции в точке zmax заданного порогового значения. Большие пороговые значения корреляции обеспечивают большую точность алгоритма, но уменьшают число найденных скважин. Например, если задано пороговое значение 0.9, а максимум функции корреляции в точке zmax равен 0.88, то скважина считается не прошедшей тест.
2. превышение заданного порогового значения коэффициентом качества корреляции в точке. Коэффициент качества корреляции определяется как коэффициент отклонения ближайшего по значению локального максимума функции корреляции от ее наибольшего локального максимума в точке zmax. Большие значения этого коэффициента означают, что найденный максимум коэффициента корреляции существенно больше других локальных максимумов функции корреляции. Например, если максимальное значение функции корреляции равно 0.9, и ближайший по величине максимум равен 0.89, то значение коэффициента качества корреляции будет равно (0.9-0.89)/0.9, что приблизительно равно 0.01. Тогда при пороговом значении коэффициента качества, равном, например, 0.5, скважина будет считаться не прошедшей тест.
3. превышение заданного порогового значения степенью транзитивности. Степень транзитивности определяется как количество предыдущих итераций алгоритма, для которых максимум функции корреляции найденной опорной скважины со скважиной текущей итерации, проходит тест 1. Этот тест повышает степень надежности метода. Например, если задан порог для значений функции корреляции из теста 1, равный 0.9, и скважина А прошла этот тест при корреляции со скважиной В из опорной группы, а скважина В, в свою очередь была утверждена при корреляции со скважиной С на предыдущей итерации, то значение порога степени транзитивности, равное 2 требует получения максимума функции корреляции не ниже 0.9 для скважины А и С, как опорной для А. Пороговое значение степени транзитивности полагается равным числу предыдущих итераций алгоритма, если это число меньше, чем заданное пороговое значение.
4. принадлежность значений заданной функции на скважине в точке максимума корреляции заданному интервалу значений. Этот тест позволяет отбрасывать заведомо плохие места на основании значений какой-либо функции, содержащей эту информацию. В качестве такой функции метод может использовать, например, функцию когерентности или функцию отклонений экстремумов вейвлет-преобразования с увеличением периода. Метод решения задачи, описываемый далее в отношении второго варианта осуществления изобретения, состоит в нахождении глубин маркеров путем вычисления максимумов функционалов, характеризующих степень похожести комплексов кривых ГИС в точках маркеров на скважинах. А именно пусть {zi},i=0,…,n глубинные отметки на скважинах W. Определим функционал на n-мерном пространстве следующим образом:

Здесь через Ck(zizj) обозначен коэффициент корреляции для k-того метода ГИС в точках zi и zj на скважинах i и j, соответственно. Этот коэффициент принимает значения от -1 до 1 и вычисляется по следующей формуле:

Максимумы этих функционалов находятся с использованием метода градиентного спуска (в данном случае, подъема), который состоит в вычислении вектора градиента, координатами которого являются частные производные функционала, и последующем поиске наибольших значений вдоль этого вектора. Для нейтрализации типичных проблем применения метода градиентного спуска реализуется специальный прием "встряхивания" промежуточных решений алгоритма, сводящийся к сглаживанию текущей точки решения и текущего вектора градиента. Такое сглаживание выполняется с заданным, уменьшающимся на каждой итерации коэффициентом, и на последних итерациях алгоритма практически не происходит. Сглаживание производится, например, методом скользящего среднего в окне, причем коэффициентом сглаживания в этом случае является радиус окна. Поскольку при изменении текущей точки решения ее глубины на некоторых скважинах могут сильно отклониться от глубин на других скважинах и оказаться ближе по глубине к другим маркерам набора, то производится сортировка глубин маркеров набора на каждой скважине. В результате этой сортировки глубины, соответствующие одному маркеру набора, могут быть присвоены другому. Этот простой прием позволяет уменьшить разброс глубин маркеров на разных скважинах.
На первом этапе вычисляется значение функционала С в начальной точке решения {zi}.
На втором этапе метода вычисляются частные производные функционала и составляется вектор градиента для текущей точки решения {zi}. (Фиг.
7)
На третьем этапе производится сглаживание вектора градиента, то есть каждая компонента вектора на скважине W заменяется на среднее значение компонент на скважинах, попавших в окрестность скважины W заданного радиуса R.
На четвертом этапе для отрезка с начальной точкой {zi} и заданной длины в направлении вектора градиента с заданным шагом ищется значение функционала, большее предыдущего. Если такое значение не найдено, то алгоритм прекращает работу и текущее решение {zi} принимается за окончательное. (Фиг.8)
На пятом этапе найденное решение уточняется за счет поиска большего значения в пределах шага, для которого обнаружен максимум, с более мелким шагом.
На шестом этапе текущим решением {zi} полагается точка, в которой достигнут максимум функционала и производится сглаживание этой точки тем же способом, что вектора градиента на третьем этапе, а радиус сглаживания R уменьшается на заданную величину (Фиг.9)/
На седьмом этапе выполняется сортировка отметок маркеров набора по глубине и производится переход ко второму этапу алгоритма.


Изобретение относится к способу, устройству и машиночитаемому носителю данных, используемых при построении геологической модели нефтяного или иного месторождения. Технический результат - повышение точности вычислений параметров, используемых при построении геологической модели расположения нефтяных или иных месторождений. Изобретение позволяет для маркеров, выбранных в качестве начального решения, вычислить такие глубины маркера на каждой скважине, которые обеспечивают наилучшую суммарную корреляцию. Для каждого маркера, входящего в набор, определяется функционал, представляющий собой сумму коэффициентов корреляции комплекса методов ГИС для пар скважин, расположенных не далее заданного расстояния друг от друга. Для этого функционала вычисляются частные производные ,и полученный таким образом вектор сглаживается и используется для нахождения большего значения функционала на некотором отрезке вдоль этого вектора. Если большего значения не найдено, то последнее положение отметок маркера считается решением задачи, а если найдено, то производится сглаживание точки решения и процесс повторяется снова. На каждой итерации алгоритма производится сортировка глубин маркеров. 3 н.п. ф-лы, 9 ил.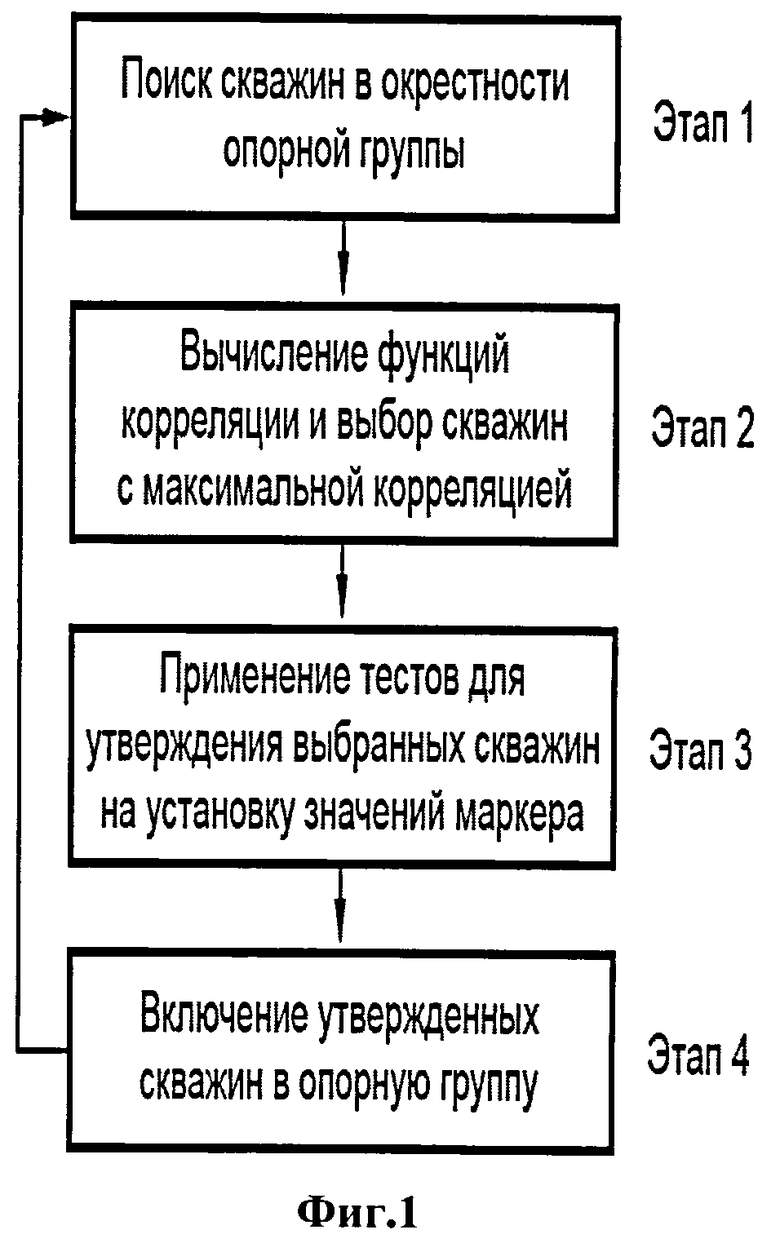
1. Способ определения положения координат глубин маркеров на скважинах W из опорной группы скважин при построении геологической модели месторождения, содержащий этапы, на которых: определяют скважины W и скважины, расположенные в заданной окрестности скважины W, при этом окрестность имеет радиус R; определяют значение отметки глубины маркера {zi}, i=0,…,n на каждой скважине W и скважинах, расположенных в заданной окрестности скважины W; определяют значение функционала C в точках, имеющих значение отметки глубины маркера {zi}, причем функционал представляет собой сумму коэффициентов корреляции для комплекса кривых ГИС; составляют векторы градиента для точек, имеющих значение отметки глубины маркера {zi}, причем вектор градиента составлен по координатам, которые являются частными производными функционала; осуществляют сглаживание вектора градиента путем замены каждой из компонент вектора градиента на скважине W на среднее значение компонент векторов градиента на скважинах из окрестности радиуса R; для отрезка заданной длины с начальной точкой отметки глубины маркера {zi} в направлении вектора градиента с заданным шагом проводят поиск значения функционала C, большего, чем предыдущее найденное значение функционала C, и если такое значение не найдено, то текущее значение отметки глубины маркера {zi} считается определенным; уточняют упомянутое определенное значение отметки глубины маркера {zi} путем поиска большего значения отметки глубины маркера {zi} в пределах заданного шага; для значения отметки глубины маркера {zi}, при котором значение функционала C является наибольшим осуществляют сглаживание вектора градиента путем замены каждой из компонент вектора на скважине W на среднее значение компонент из окрестности уменьшенного на заданную величину радиуса R; сортируют отметки глубины маркера {zi} по глубине; и итеративно повторяют предыдущие этапы способа до тех пор, пока не будет найдено большее значение функционала C, при этом сглаживание осуществляется методом скользящего среднего в окне, причем коэффициентом сглаживания является радиус окна.
2. Устройство для определения положения координат глубин маркеров на скважинах W из опорной группы скважин при построении геологической модели месторождения, содержащее: один или множество процессоров; модули ввода/вывода (I/O); машиночитаемый носитель данных (память), который содержит код программы, который побуждает процессор или процессоры выполнять этапы, на которых осуществляется: определение скважины W и скважин, расположенных в заданной окрестности скважины W, при этом окрестность имеет радиус R; определение значения отметки глубины маркера {zi}, i=0,…,n на каждой скважине W и скважинах, расположенных в заданной окрестности скважины W; определение значения функционала C в точках, имеющих значение отметки глубины маркера {zi}, причем функционал представляет собой сумму коэффициентов корреляции для комплекса кривых ГИС; составление векторов градиента для точек, имеющих значение отметки глубины маркера {zi}, причем вектор градиента составлен по координатам, которые являются частными производными функционала; осуществление сглаживания вектора градиента путем замены каждой из компонент вектора градиента на скважине W на среднее значение компонент векторов градиента на скважинах из окрестности радиуса R; для отрезка заданной длины с начальной точкой отметки глубины маркера {zi} в направлении вектора градиента с заданным шагом осуществляется поиск значения функционала C, большего, чем предыдущее найденное значение функционала C, и если такое значение не найдено, то текущее значение отметки глубины маркера {zi} считается определенным; уточнение упомянутого определенного значения отметки глубины маркера {zi} путем поиска большего значения отметки глубины маркера {zi} в пределах заданного шага; для значения отметки глубины маркера {zi}, при котором значение функционала C является наибольшим, осуществляется сглаживание вектора градиента путем замены каждой из компонент вектора на скважине W на среднее значение компонент из окрестности уменьшенного на заданную величину радиуса R; сортировка отметок глубины маркера {zi} пo глубине; и итеративное повторение предыдущих этапов до тех пор, пока не будет найдено большее значение функционала C, причем сглаживание осуществляется методом скользящего среднего в окне, причем коэффициентом сглаживания является радиус окна.
3. Машиночитаемый носитель данных, пригодный для использования в устройстве по п.2, который содержит код программы, который при выполнении побуждает процессор или процессоры выполнять действия способа по п.1.
| DV-SeisGeo, сведения о которой представлены на сайте по адресу URL: http://www.dvseisgeo.ru/, документация к которой размещена по адресу URL: http://www.dvseisgeo.ru/Documentation/Documentation.htm, версия которой, а именно книга 30, размещена на сайте 29.03.2010 согласно сведениям Веб-архива (https://archive.org/) по адресу URL: |

